
BASIC STRATEGIES TO ENHANCE TELEOPERATION
PLATFORMS THROUGH THE INTERNET
J. J. Escribano, J. A. Cerrada, S. R. G
´
omez
Dpto. de Lenguajes y Sistemas Inform
´
aticos UNED
c/ Juan del rosal, 16 - 28040 Madrid (Spain)
C. Cerrada
Dpto. de Ingenier
´
ıa El
´
ectrica, Electr
´
onica y de Control UNED
c/ Juan del rosal, 12 - 28040 Madrid (Spain)
Keywords:
Virtual environments, teleoperation, Internet.
Abstract:
This paper shows in a schematic way the basic objectives to enhance teleoperation platforms, that have been
achieved in the PhD Thesis (Escribano, 2003). These objectives are the result of acquired experience working
with the teleoperation platform developed by our research group in teleoperation. The objectives carried out
have been formulated after analyzing the performance of the initial platform and detecting some restrictions
in several key parts of its design. Specifically, three basic improvement areas have been take into account. The
enhance objectives have been focused in aspects such as the operating system, the human-machine interface
and finally, in aspects regarding to the communication between the master and the slave. In this paper the main
detected problems are introduced as well as the chosen solutions in each case. Experimental results regarding
to the last enhancement objective are finally shown.
1 INTRODUCTION
Most of teleoperation platforms have been develo-
ped under this thinking: the more capabilities you
put, the better results you will obtain (Antal K. Be-
jczy and Schenker, 1994), (W. J. Book and Obergfell,
1996), (Luo and Chen, 1997). Various strategies to
enhance teleoperation platforms through the Internet
are shown in this paper. These strategies are inspired
in the application of low cost philosophy in both soft-
ware and hardware components. Low cost does not
mean bad performance or poor results, but it means
to invest as much money as the research need and no
more(Gomez S. R. and C., 1999).
The starting point of this work has been the previ-
ous experience acquired in the research line of tele-
operation existing in our group. As a result of this
research activity, we already had a teleoperation plat-
form. The first step was to analyze performance ca-
pabilities of the platform in order to identify its main
limitations. Three major areas of improvement were
detected corresponding to the three enhance objec-
tives taken into account in this work. These objectives
will be shown in the next sections.
This paper is organized as follows. The capabili-
ties analysis of the previous platform is presented in
the second section. The third section shows the three
enhance objectives considered. Experimental results
of implemented solutions are presented in the fourth
section. The conclusions are shown in the last section.
2 CAPABILITIES EVALUATION
ANALYSIS
During the experimentation with this platform several
limitations have been brought forth. These constraints
have induced the research work carried out. Although
the different strategies developed to enhance this plat-
form will be described in the next section, here we
present the detected limitations. Suggested actuation
lines are also introduced.
2.1 Operating system
Human-machine interface, control system and
master-slave communication system were running
under a no real time operating system. Therefore,
critical time measurements were not reliable, making
very hard to evaluate platform performance and to
implement realistic control strategies.
242
J. Escribano J., A. Cerrada J., R. Gómez S. and Cerrada C. (2004).
BASIC STRATEGIES TO ENHANCE TELEOPERATION PLATFORMS THROUGH THE INTERNET.
In Proceedings of the Sixth International Conference on Enterprise Information Systems, pages 242-245
DOI: 10.5220/0002628102420245
Copyright
c
SciTePress

2.2 Human-machine interface
development tool
The main constrains of the previous human-machine
interface will be shortly described. The origin of
these limitations were located in the utilization of a
commercial software called VRT from Superscape as
developing tool for this interface. They can be su-
mmarized as follows:
• It is a commercial and closed software.
Due to this, support can disappear any time, ma-
king impossible the adaptability to any later on re-
quirement. Our proposal was to develope software
of our own allowing the addition to the system of
any new capability.
• It has no 3D information extraction capabilities
from 2D images.
The used environment did not have any special de-
vice to showing three dimensional visual informa-
tion. A solution to this problem could be adding
projected shadows to the 2D generated scenes, but
the software tool did not have this capability. It
should be very interesting to include this capability
because projected shadows allow to the operator
extracting the third dimension from a 2D image.
• The collision detection is acomplished by means of
bounding boxes.
Any object must be included inside a box (boun-
ding box). If the bounding box of an object fits to
it very well, the bounding box allow to calculate
collisions well, but in the case of irregular shaped
objects, it would seem that the collisions do not ha-
ppen in the objects surface. As a solution to this
problem we suggest to use the own object surface
for collision detection.
2.3 Master slave communication
system
The communication with the slave system was be-
ing carried out thought an standard RS232 serial port.
Due to this fact the slave system must be very near
to the master system. It should be very advantageous
to implement the communication through the Inter-
net. In this way both systems could be located at any
place of the planet.
3 IMPLEMENTED STRATEGIES
From the previous study a set of enhance strategies
have been proposed and implemented in our experi-
mental platform. They can be classified in the same
three categories of the earlier analysis. This section
is devoted to describe the enhancements implemented
in each category.
• Operating system
– RTLinux (FSMLabs, ) has been selected and
used as real time operating system to substi-
tute the previous version that was developed un-
der Windows 9X. With this transformation the
teleoperation platform behaves as a synchronous
system that works with a period t controlled and
stable. In this way, platform capabilities have en-
hanced thanks to the improvement of the critical
time measurement processes, so necessary to a-
nalyze and evaluate the actual teleoperation plat-
form performance. Additionally, the use of a real
time operating system allows to include more re-
liable controllers that enhance the time response
of the operator, the slower part of all the involved
in a teleoperation system.
– A new algorithm that allows to fit the data rea-
ding speed from the used Spacemouse to any pe-
riod t, in spite of the Spacemouse is only able to
provide data every 112 msec., has been imple-
mented.
• Human-Machine Interface
– By using the OpenGL library as a base, a C++
classes library that allows to make 3D scenes and
to render them in few milliseconds has been im-
plemented.
– A collision detection free library (van den
Bergen, ) has been used to implement a new al-
gorithm of maximum nearness to objects in case
of collision with the robot tool.
– The inclusion of a projected shadows algorithm
has allowed to demonstrate by means of an
experimental analysis that virtual environments
shown in monoscopic diplays allow to reach bet-
ter performance that if they are shown with stere-
ovision in virtual teleoperation platforms. This
study was presented in a more detailed way in
(J. J. Escribano, 2000). This performance en-
hancement is obtained by adding projected shad-
ows to virtual environment. An example of de-
veloped virtual environment that includes pro-
jected shadows is shown in the figure 1.
• Connection of master and slave systems
– An statistical module has been developed to ana-
lyze the Internet segment that communicates the
master system to the slave system by means of
port 7 UDP. This module allows to know the cur-
rent state of the segment and to proceed accor-
dingly.
– An Internet segment simulator that introduces
a time delay d in the receipt of packets, follo-
wing d a normal ditribution N (µ, σ) (µ and σ are
BASIC STRATEGIES TO ENHANCE TELEOPERATION PLATFORMS THROUGH THE INTERNET
243

Figure 1: Virtual environment with projected shadows
modifiable), and that takes into account packet
loss (also modifiable), has been implemented. It
has allowed to experiment with several distances
between master and slave systems.
– Several methods that try to avoid the double
problem related to communication through the
Internet (delay and packets loss) have been im-
plemented. Modifications of these methods have
been accomplished with the purpose of impro-
ving them. A comparative study between ori-
ginal methods and modified methods, similar to
the study of projected shadows, has been rea-
lised. As a result of this study it has been demon-
strated that the modified methods present impor-
tant enhancements with respect to the original
ones. Part of this study is shown in the next sec-
tion.
4 EXPERIMENTAL RESULTS
In this section it will be shown the main results of
the above mentioned comparative study concerning to
master slave communication system through the In-
ternet. Part of the obtained experimental results re-
garding to collisions measurement, backward move-
ments and times to complete a task of several meth-
ods of teleoperation through the Internet (Oboe and
Fiorini, 1998), (Brady and Tarn, 1998), (Oboe, 2001)
implemented in the PhD thesis (Escribano, 2003) are
presented here. Thirty tries for each of the considered
typical cases of connections through the Internet were
done. The mean and the standard deviation of the de-
lay for each considered case were extracted from the
table (Oboe and Fiorini, 1998) (see the table 1).
To avoid the effect of the operator acclimation to
the methods, the four cases were not tested in the
same order for each method. They were done in the
order presented in the table 2.
Next, the case 1 will be commented. In the case
Table 1: Delay parameters in typical connections through
the Internet
Case remote
machine
location
Distance
(Km)
µ(ms) σ(ms) % loss
1 Different
continent
10000 326.3 27.20 41.4
2 Different
city
150 17.20 9.74 0.80
3 Same
domain
30 8.10 5.35 0.08
4 Local 0.05 0.998 0.715 0.00
Table 2: Case order for each method in the experiments
Cases 1 2 3 4
Analitic expression 1 9 13 5
Kalman 14 6 2 10
Enhanced Kalman 11 3 7 15
Enhanced buffer 8 16 12 4
1, i.e. different continent connection, it can be ob-
served that enhanced Kalman method behaves much
better than Kalman method, both in collisions and
backwards movements (see figures 2 and 3). In the
figure 4 it can be seen that analitic expression method
detaches from the other three methods, because of its
worse behavior in completion task time. In the figure
5 it can be seen in detail that behavior of the other
three methods is similar in completion task time.
Figure 2: Collitions in case 1
As conclusion of this comparative study the me-
thods can be ordered according to their behavior.
This behavior is significatively different when dis-
tance connection increases. In such situations, the
method that has a better behavior is enhanced buffer
method, next method is enhanced Kalman, after this
is the Kalman method and the last method is analitic
expression method. As it can be observed, it is not
necessary to use sophisticated method as a Kalman
filter in order to obtain good results in teleoperation
through the Internet.
ICEIS 2004 - HUMAN-COMPUTER INTERACTION
244
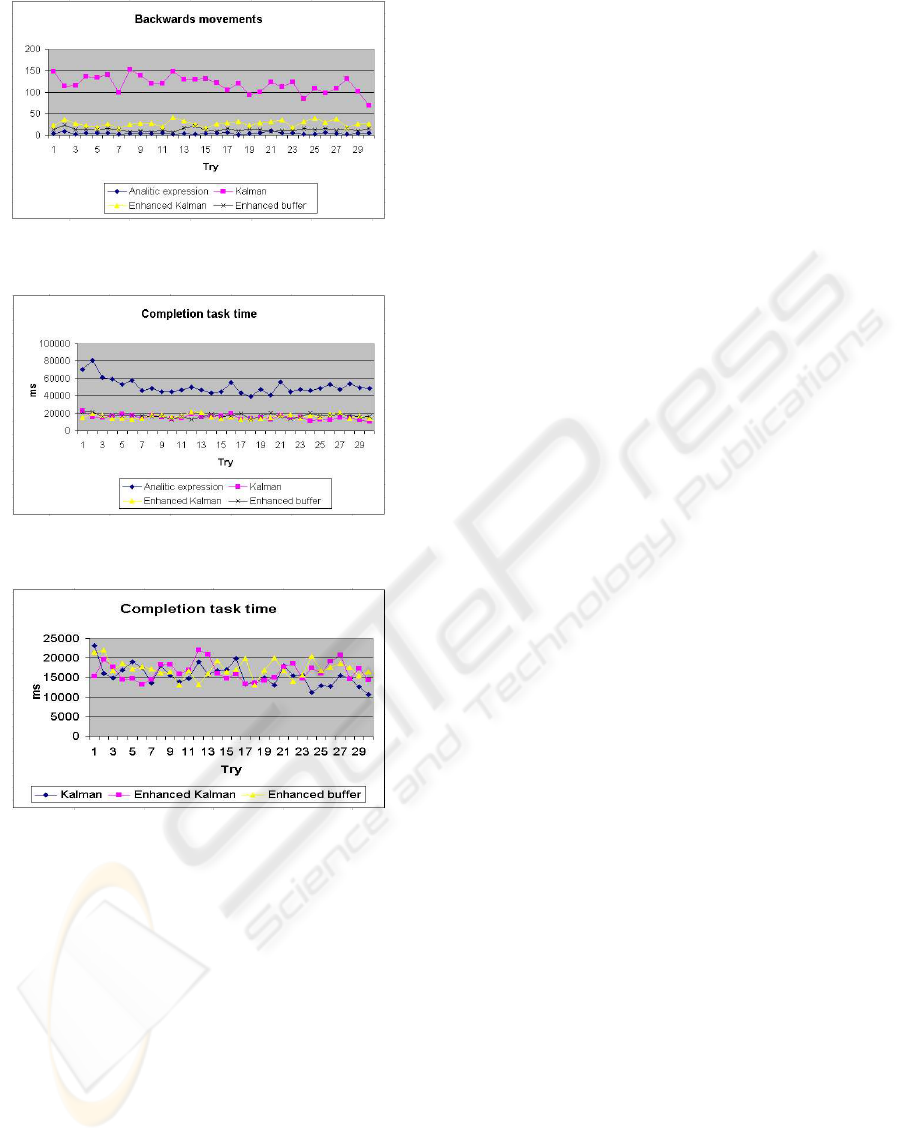
Figure 3: Backwards movements in case 1
Figure 4: Completion task times in case 1
Figure 5: Detail of completion task times in case 1
5 CONCLUSIONS
The strategies of enhancement of teleoperation plat-
forms through the Internet developed in the frame of
the PhD thesis (Escribano, 2003), have been shown
in a schematic way. These strategies are based on the
acquired skill working with the teleoperation platform
developed by our research group. Specifically, three
basic strategies have been taken into account. These
strategies are focused on the initial operating system
that was not a real time operating system, so it im-
posed hard restrictions with regard to time measure-
ments in critical processes, on the human-machine in-
terface that was very constricted to accomplish con-
trasted performance analysis, and at last on the com-
munication between master and slave systems, that
was not implemented through the Internet in the ini-
tial design. In this paper the main detected problems
are introduced as well as the chosen solutions in each
case. More explicitly, experimental results have been
shown regarding to the last enhancement strategy.
ACKNOWLEDGES
This research has been carried out under financial
support of the project DPI2002-03999-C02-02.
REFERENCES
Antal K. Bejczy, Paolo Fiorini, W. S. K. and Schenker, P.
(1994). Toward integrated operator interface for ad-
vanced teleoperation under time-delay. In Proc. of the
IEEE/RSJ/GI International Conference on Intelligent
Robots and Systems (IROS), pages 563–570, Munich,
Germany.
Brady, K. and Tarn, T. J. (1998). Internet-based remote tele-
operation. In Proc. of the IEEE 1998 International
Conference on Robotics and Automation, pages 65–
70, Leuven, Belgium.
Escribano, J. J. (2003). Estrategias de dise
˜
no de platafor-
mas de teleoperaci
´
on a trav
´
es de Internet. PhD thesis,
E.T.S.I Industriales. UNED.
FSMLabs. RTLinux. http://fsmlabs.com/community/.
Gomez S. R., Carro J., M. E. E. J. J. and C., C. (1999). A
design strategy for low cost experimental telerobotics
platforms. In Proc. IEEE Int. Workshop on Robot and
Human Interaction, pages 273–278, Pisa, Italy.
J. J. Escribano, C. Cerrada, S. R. G. J. A. C. (2000). Stereo
vision vs. projected shadows in performance evalua-
tion of teleoperated systems. In Proc. IEEE Int. Work-
shop on Robot and Human Interaction, Osaka, Japan.
Luo, R. C. and Chen, T. M. (1997). Remote supervisory
control of a sensor based mobile robot via internet. In
Proc. IROS’97, pages 1163–1168.
Oboe, R. (2001). Web-interfaced, force-reflecting teleoper-
ation systems. IEEE Trans. on Industrial Electronics.,
48(6):1257–1265.
Oboe, R. and Fiorini, P. (1998). A design and control envi-
ronment for internet-based telerobotics. The Interna-
tional Journal of Robotics Research, 17(4):433–449.
van den Bergen, G. FreeSolid: Software Library for Inter-
ference Detection. http://www.win.tue.nl/
˜
gino/solid/.
W. J. Book, H. Lane, L. J. L. D. P. M. and Obergfell, K.
(1996). A novel teleoperated long-reach manipula-
tor tesbed and its remote capabilities via the internet.
In Proc. of the IEEE 1996 International Conference
on Robotics and Automation, pages 1036–1041, Min-
neapolis, Minnesota.
BASIC STRATEGIES TO ENHANCE TELEOPERATION PLATFORMS THROUGH THE INTERNET
245
