
AN ADAPTABLE TIME-DELAY NEURAL NETWORK TO
PREDICT THE SPANISH ECONOMIC INDEBTEDNESS
M. P. Cuellar, W. Fajardo, M.C. Pegalajar, R. Pérez-Pérez
Dpt. Computer Science of University of Granada, Periodista Daniel Saucedo Aranda s/n,Granada,Spain
M.A. Navarro
Dpt. Economía Financiera y Contabilidad, Campus Universitario de la Cartuja, Granada, Spain
Keywords: Neural Network, Training, Time-Delay Neural Network, Levenberg-Marquardt
Abstract: In this paper, we study and predict the economic indebtedness for the autonomic of Spain. In turn, we use
model of neural network. In this study, we assess the feasibility of the Time-Delay neural network as an
alternative to these classical forecasting models. This neural network permits accumulate more values of
pass and a best prediction of the future. We show the MSE assignment to check the good forecasting of
indebtedness economic.
1 INTRODUCTION
Artificial Neural Networks (ANNs) have been
deployed in a variety of real world problems
(Haykin (1998)). The success of ANNs for a
particular problem depends on the adequacy of the
training algorithm regarding the necessities of the
problem. The existing gradient-based techniques in
particular the Back-propagation algorithm, have
been widely used in the training of ANNs.
A feed-forward neural network with an arbitrary
number of neurons can approximate some uniformed
continuous functions (Hornik et at.(1989)). These
arguments permit us the basic motivation to use
neural network for forecasting time series.
In this paper, we study the way to predict the
Spanish economic indebtedness for 2001 year. We
use the gross inner product of each community.
This paper is organized as follows. Section 2 we
introduce Time-Delay neural network. In Section 3,
we expose the adaptation algorithm, Levenberg-
Marquardt. So, Section 4 we show ours experimental
results in the application of this model with
autonomous Spain indebtedness. Finally, our
conclusions are presented in Section 5.
2 A TIME DELAY NEURAL
NETWORK
The traditional model of multi-layers neural network
is formed by a set of layers with artificial neurons.
Neurons of one layer is connected with each one of
neurons the following layers, so they are completely
connected. In figure 1, we show a neuron that it
appertains to layer l+1 of the network. The inputs
l
i
x
to the neuron in layer l are multiplied by the
weights
l
ij
. These weights represent the synaptic
connection between the neuron i in previous layer
and neuron j in layer l+1. The output of neuron is
calculated through a sigmoidal function of the
weighty sum of its inputs:
w
1l
j
i
ll
iji
x
fwx
+
⎛⎞
=
⎜
⎝⎠
∑
⎟
(1)
Figure 1: Representation of a neuron
457
P. Cuellar M., Fajardo W., C. Pegalajar M., Pérez-Pérez R. and Navarro M. (2004).
AN ADAPTABLE TIME-DELAY NEURAL NETWORK TO PREDICT THE SPANISH ECONOMIC INDEBTEDNESS.
In Proceedings of the Sixth International Conference on Enterprise Information Systems, pages 457-460
DOI: 10.5220/0002628604570460
Copyright
c
SciTePress
The
0
l
x
=1 is the bias for neuron. The training of
network is realized through the Back-Propagation
algorithm.
To handle the temporal information (time
patterns) for the times series data, a neural network
must be “short-term memory”, the primary role of is
to remember the past signal. There are two attributes
of memory structure: depth and resolution. The
memory depth defines the length of the time window
available in the memory structure to store past
information. The deeper the memory, the further it
holds information from the past. Memory resolution
defines how much information will be remembered
in a given time window. The so-called “tapped delay
line” is the simplest and most commonly used form
of “short-term memory”.
A popular neural network that uses ordinary time
delays to perform temporal processing the so-called
time delay neural network (TDNN), which was first
described in Lang and Hinton (1988) and Waibel et
al. (1989). The TDNN is a multilayer feedforward
network whose hidden neurons and output neurons
are replicated across time. It was devised to capture
explicitly the concept of symmetry time as
encountered in the recognition of an isolated word
(phoneme) using a spectrogram.
The main goal in development of TD-neural
networks was to have a neural network architecture
for non-linear feature invariant classification under
translation in time or space. TD-Networks uses
built-in time-delay steps to represent temporal
relationships. The invariant classification translation
is realized by sharing the connection weights of the
time delay steps. The activation of each TD-neuron
is computed by the weighted summation of all
activations of predecessor neurons in a input
window over time and applying a non-linear
function (i.e. a sigmoid function) to the sum.
Time-Delay neural network (TDNN) is a
dynamic neural network structure that is constructed
by embedding local memory (tapped delay line
memory) in both input and output layers of a
multilayers feed forward neural network. Both, its
input and output are time series data.
3 GRADIENT DESCENDENT:
LEVENBERG-MARQUARDT
Like the quasi-Newton methods, the Levenberg-
Marquardt algorithm was designed to approach
second-order training speed without having to
compute the Hessian matrix. When the performance
function has the form of a sum of squares (as is
typical in training feedforward networks), then the
Hessian matrix can be approximated as
and the gradient can be computed as
where the Jacobian matrix that contains first
derivatives of the network errors respect to the
weights and biases, and
e is a vector of network
errors. The Jacobian matrix can be computed
through a standard Backpropagation technique that
is much less complex than computing the Hessian
matrix.
The Levenberg-Marquardt algorithm uses this
approximation to the Hessian matrix in the following
Newton-like update:
When the scalar µ is zero, this is just Newton's
method, using the approximate Hessian matrix.
When µ is large, this becomes gradient descent with
a small step size. Newton's method is faster and
more accurate near an error minimum, so the aim is
to shift towards Newton's method as quickly as
possible. Thus, µ is decreased after each successful
step (reduction in performance function) and is
increased only when a tentative step would increase
the performance function. In this way, the
performance function will always be reduced at each
iteration of the algorithm.
We use the algorithm implemented by
MATLAB. TRAINLM can train any network as
long as its weight, net input, and transfer functions
have derivative functions. We use the version 6.5
of MATLAB and toolbox of neural network with a
license of campus available in Universidad of
Granada.
4 RESULTS
To continue, we apply this model of neural network
to resolve the problem of forecasting of indebtedness
economic of the autonomous community Spanish in
the period between year 1986 and 2000. We have a
set of values of each community. These values
reflect the ratio of indebtedness. The TDNN utilized
is formed by 20 neuron input and a neuron output.
Moreover, we utilized three step delay in the input
layer.
In the following figure are represented the real
values (blue) and the predicted values (red). The
sixteen value is the prediction to year 2001. The axis
ICEIS 2004 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
458
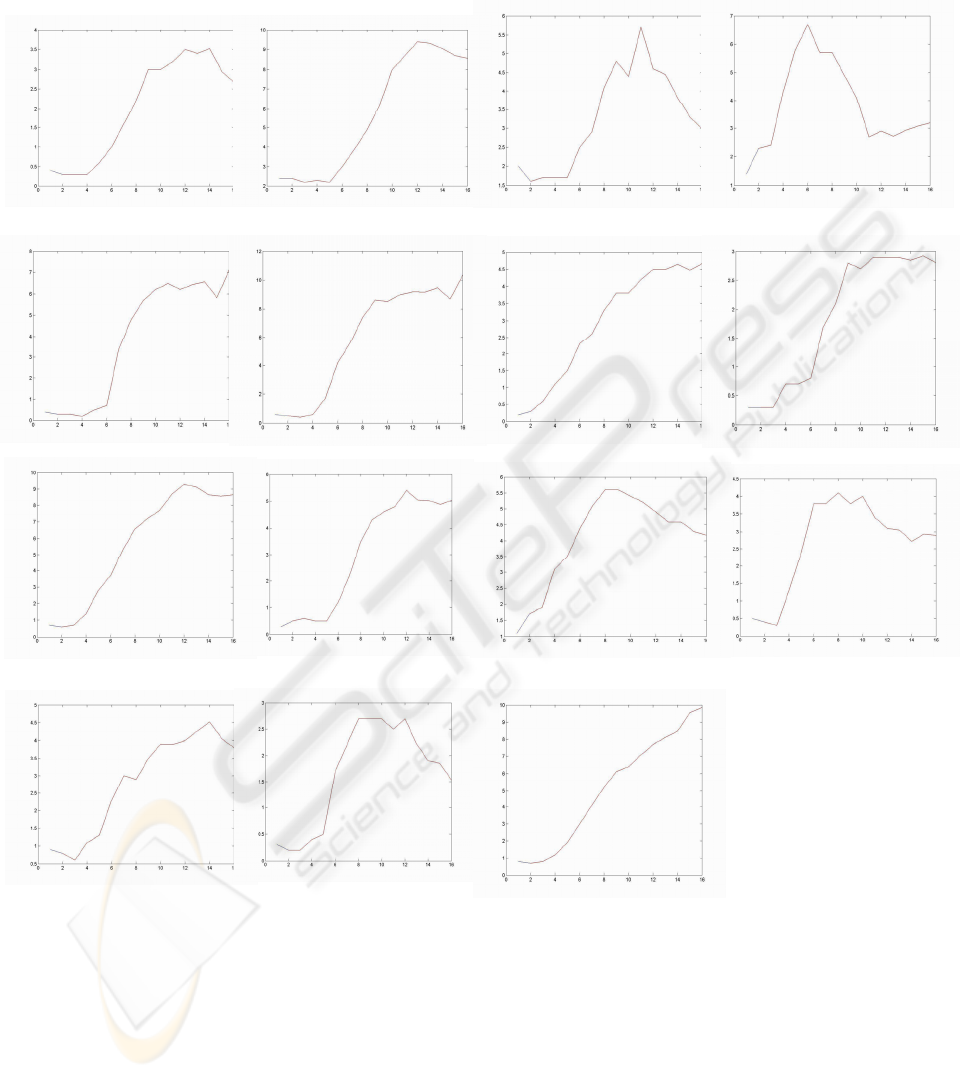
X represents the year of data and axis Y represents
the gross inner product.
The results obtained after of training can be
consulted in the following figures:
Fi
g
ure 8: Castilla-Leon
Figure 9: Cataluña
Fi
g
ure 6: Canarias
Fi
g
ure 7: Cantabria
1
2
Figure 12: Madrid
Fi
g
ure 10: Extremadura
Fi
g
ure 13: Castilla-Mancha
3
As we can observe the level the learning is very
high. In the following table (table 1) where we show
the MSE commited in the train, the values are very
low. Therefore, we realized a good approximation to
the functions.
Fi
g
ure 11: Galicia
Figure 2: Andalucia Figure 3: Aragón
Figure 14: Murcia
Figure 15: Rioja
Fi
g
ure 4: Asturias Fi
g
ure 5: Baleares
Fi
g
ure 16: Valencia
AN ADAPTABLE TIME-DELAY NEURAL NETWORK TO PREDICT THE SPANISH ECONOMIC INDEBTEDNESS
459
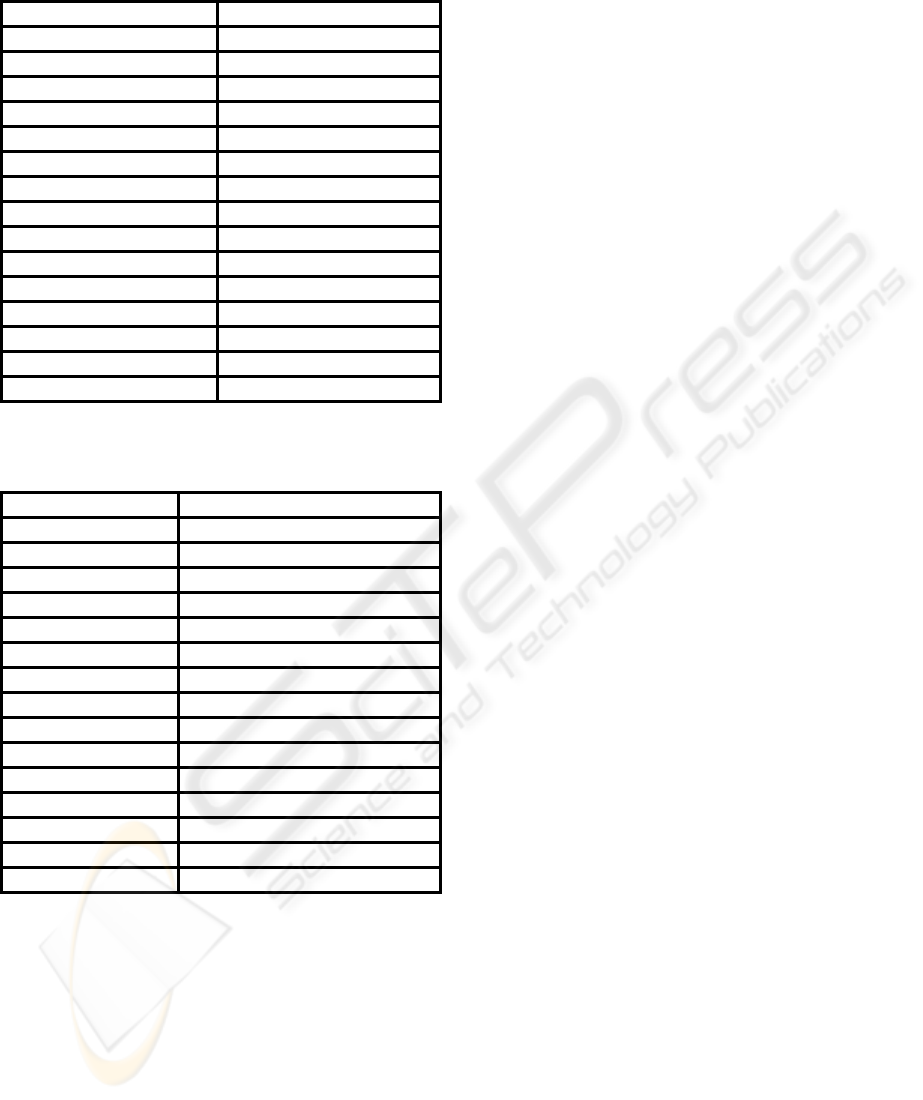
Table 1: The midle MSE of ten ejecution the
algorithm over Time-Delay Neural Network
COMMUNITY Medium Square Error
Andalucía 9.12219e-025
Aragón 3.40256e-023
Asturias 1.76825e-023
Baleares 2.27909e-024
Islas Canarias 9.21784e-023
Cantabria 4.14689e-027
Castilla León 3.61551e-024
Cataluña 1.86823e-022
Extremadura 1.88568e-023
Galicia 1.2120e-022
Madrid 1.32362e-022
Castilla-La Mancha 9.95153e-024
Murcia 1.97685e-023
Rioja 4.97758e-026
Valencia 1.84428e-023
The following table (table 2) shows the inference
for 2001 year:
COMMUNITY RATE OF INDEBTEDNESS
Andalucía 8.741354
Aragón 5.114635
Asturias 2.888294
Baleares 1.498553
Islas Canarias 2.266441
Cantabria 3.356926
Castilla León 3.237302
Cataluña 8.366449
Extremadura 7.838027
Galicia 10.958742
Madrid 4.669944
Castilla-La Mancha 2.814105
Murcia 4.371530
Rioja 2.810956
Valencia 10.338479
5 CONCLUSIONS
In this paper, we show that the assignment MSE
committed is very low.
Therefore, we show how TDNN and Levenberg-
Marquardt act over the values of Spanish economic
indebtedness. The error commited is very low and
therefore the ajust is very good. The new
approximate with TDNN- Levenberg-Marquardt
give better result as other work with Finite Impulse
Response Neural Network (M.P. Cuellar et al.
2003). We obtain the best solution for time-series
predictions in case of indebtedness in comparison
with other neural network topology and studies.
REFERENCES
Cuellar, M.P., Navarro, M.A., Pegalajar, M.C., Pérez-
Pérez, R. 2003. A Fir Neural Network to model the
autonomous indebtedness. Proceedings of the X SIGEF
Congress, vol I. Leon. Pp. 199-209.
Cybenko G. 1989. Approximation by superpositions of a
sigmoidal function. Mathematics of Control, Signals,
and Systems, vol 2 no. 4.
Haykin, S. 1998. Neural Network: A Comprehensive
Foundation. Second Edition. Prentice Hall.
Hornik, K. Stinchombe M. and White H. 1989. Multilayer
feedforward networks are universal approximators.
Neural Networks, vol 2, pp. 359-366.
Irie B. and Miyake S. 1988. Capabilities of three-layered
perceptrons. Proceedings of the IEEE Second
International Conference on Neural Networks, vol I,
San Diego, CA, July 1988, pp.641-647.
Kanzow C., Yamashita, N. And Fukushima, M. 2002.
Levenberg-Marquardt methods for constrained
nonlinear equations with strong local convergence
properties.April 23
Lang, K.J., and G.E. Hinton, 1988. The development of
the time-delay neural network architecture for speech
recognition. Technical Report CMU-CS-88-152,
Carnegie-Mellon University, Pittsburgh, PA.
Marquardt, D.W. 1963. An algorithm for least-squares
estimation of nonlinear parameters. Journal of the
Society for industrial and Applied Mathematics,
11:431-441.
Mor, J.J. 1977. The Levenberg-Marquardt Algorithm:
Implementation and Theory, in Numerical Analysis, G.
A. Watson, ed., Lecture Notes in Mathematics, vol.
630, Springer-Verlag, Berlin, 1977, pp. 105-116.
Ricardo, B.C., Prudëncio and Teresa B. Ludermir. Neural
Network Hybrid Learning: Genetic Algoritms &
Levenberg-Marquardt.
Waibel, A., T. Hanazawa, G.Hinton, K.Shikano, and K.J.
Lang, 1989. Phoneme recognition using time-delay
neural networks. IEEE Transactions on Acoustics,
Speech, and Signal Processing, vol. ASSP-37, pp.328-
339.
Weigend, A. Huberman, B. and Rumelhart, D. 1990.
Predicting the future: a connectionist approach.
International Journal of Neural Systems, vol 7, no. 3-4,
pp. 403-430.
ICEIS 2004 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
460
