
LEARNING BAYESIAN NETWORKS WITH LARGEST CHAIN
GRAPHS
Mohamed BENDOU
ESIEA Recherche
38 rue des Docteurs Calmette et Gu
´
erin
53 000 Laval, France
Paul MUNTEANU
ESIEA Recherche
Keywords:
Bayesian networks, equivalence classes, learning, largest chain graphs, essential graphs, instanciable partially
oriented graph
Abstract:
This paper proposes a new approach for designing learning bayesian network algorithms that explore the
structure equivalence classes space. Its main originality consists in the representation of equivalence classes
by largest chain graphs, instead of essential graphs which are generally used in the similar task. We show
that this approach drastically simplifies the algorithms formulation and has some beneficial aspects on their
execution time.
1 INTRODUCTION
Learning Bayesian networks from data is one of the
most ambitious approaches to Knowledge Discovery
in Databases. Unlike most other data mining tech-
niques, it does not focus its search on a particular kind
of knowledge but aims at finding all the (probabilis-
tic) relations which hold between the considered vari-
ables.
From a statistical viewpoint, a Bayesian network
efficiently encodes the joint probability distribution of
the variables describing an application domain. This
kind of knowledge allows making rational decisions
involving any arbitrary subset of these variables on
the basis of the available knowledge about another ar-
bitrary subset of variables.
Moreover, Bayesian networks may be represented
in a graphical annotated form which seems quite nat-
ural to human experts for a large variety of applica-
tions. The nodes of a Bayesian network correspond
to domain variables and the edges which connect the
nodes correspond to direct probabilistic relations be-
tween these variables. Under certain assumptions
(Spirtes et al., 1993), these relations have causal se-
mantics (a directed edge A → B may be interpreted
as A is a direct cause of B), while most other data
mining approaches deal exclusively with correlation.
There are two main approaches to learning
Bayesian networks with unknown structure. The
first one is to build the network according to the
conditional independence relations found in data
(e.g., (Spirtes et al., 1993)). Traditionally, these
methods aim at discovering causal relations between
the variables and, therefore, emphasize the structural
fidelity of the Bayesian networks they learn. How-
ever, they suffer from the lack of reliability of high-
dimensional conditional independence tests.
The other approach to learning Bayesian networks
is to define an evaluation function (or score) which
accounts for the quality of candidate networks with
respect to the available data and to use some kind of
search algorithm in order to find, in a “reasonable”
amount of time, a network with an “acceptable” score
(we use the terms “reasonable” and “acceptable” be-
cause this learning task has been proven to be NP-
hard for the evaluation functions mentioned in the fol-
lowing section). These algorithms are less sensitive to
the quality of the available data and their results can
be successfully used in various decision making tasks.
However, as we have show in (Munteanu and Ben-
dou, 2001), there are many local optima in the space
of Bayesian networks and heuristic search algorithms
may easily be trapped in one of them. The explo-
ration of the space of Bayesian network structures by
a greedy search algorithm may end with a structure
which fails to reveal some independence relations be-
tween the variables and, therefore, may be rather dif-
ferent from the true one. The main reason for this is
the equality of the score of equivalent networks.
The space of equivalence classes of Bayesian net-
184
BENDOU M. and MUNTEANU P. (2004).
LEARNING BAYESIAN NETWORKS WITH LARGEST CHAIN GRAPHS.
In Proceedings of the Sixth International Conference on Enterprise Information Systems, pages 184-190
DOI: 10.5220/0002636301840190
Copyright
c
SciTePress
work structures seems to be better suited for this kind
of search. Learning algorithms which explore this
space have already been studied in (Chickering, 1996)
(fig 1.a). Intuitively, this approach consists in allow-
ing the addition of undirected edges when no direc-
tion is preferred by the score. The conclusion of
this work was that the search in the space of equiva-
lence classes generally provides better results than the
search in the space of Bayesian networks but, unfor-
tunately, unfortunately, this algorithm is considerably
slower than classical ones. Mainly because they have
to build instances of the equivalence classes in order
to check their consistency and in order to calculate
their score.
In (Munteanu and Bendou, 2001) and (Bendou and
Munteanu, 2002) we have proposed an equivalence
classes leaning model EQ, as described in fig 1.b. It
introduces the ”instantiable” partially oriented graphs
notion, provides the means for the verification of the
consistency of these partially directed graphs and for
the computation of their score without instantiation.
In EQ, the transformation operators are constrained
to make sure that the transformed graphs are instan-
tiable. When the best instantiable partially oriented
graph is obtained, for each leaning step, it is trans-
formed on essential graphs. This approach consider-
ably reduces the execution time of the leaning task
in the space of equivalence classes. It became com-
parable to the execution time of the classical algo-
rithms that explore bayesian network structures space
for best result in terms of obtained precision results.
The price to pay for this efficiency is the concep-
tual complexity of the algorithms. In fact, they not
only require the development of the specific applica-
tion constraints for each transformation operation, but
they also require the non-trivial post-treatments to ob-
tain the essential graph result.
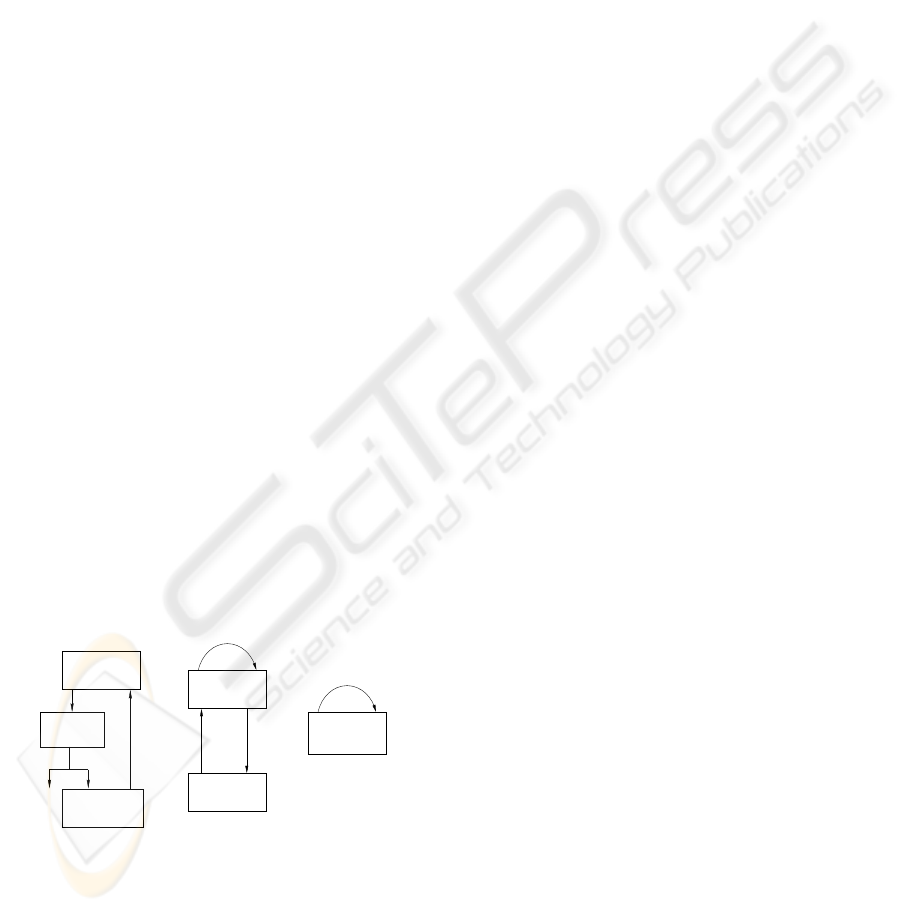
Best transformation
search
Transformation
Score
Calculating
graphs
graphs
search
Best transformation
Essential graphs
Partialy oriented
Constraints
Generation of
essential graph
a . Chickering model
c. EQ-LCG model
b. EQ model
Failure
Transformation
without constraints
Instances
generation
Success
Largest chain
Essential graph
Partially oriented
graphs
DAGs
Figure 1: Equivalence classes learning models
In this paper, we propose a new model for lean-
ing equivalence classes, EQ-LCG (EQ for equiva-
lence classes and LCG for largest chain graphs, see
fig 1.c). The main originality of this model consists
in the representation of equivalence classes by largest
chain graphs (Frydenberg, 1990), instead the essential
graphs. As shown in fig1, the using of largest chain
graphs allow to reduce the representation forms used
in the learning, with beneficial effects on the concep-
tual complexity and on the EQ-LCG algorithms effi-
ciency. EQ-LCG use one kind of graphs to represent
the structure classes evaluated in the learning and use
one algorithm (described in section 3.2) to validate all
the transformation operators
The next section introduces the theoretical notions
on which EQ-LCG is based. The EQ-LCG algorithm
aspects are presented in the section 3 and its experi-
ential evaluation make the object of the section 4.
2 THEORETICAL FRAMEWORK
Definition 1 (Equivalence) Two DAGs are equiva-
lent if and only if they represent the same conditional
independence relationships. A maximal set of equiva-
lent DAGs forms an equivalence class.
Verma and perl (Verma and Pearl, 1990) have charac-
terized the equivalence of the DAGs in term of struc-
ture:
Theorem 1 ((Verma and Pearl, 1990)) All Bayesian
networks belonging to the same equivalence class
have the same skeleton and the same v-structures
(Verma and Pearl, 1990).
A skeleton is an undirected graph resulting from
ignoring the directionality of edges and a v-structures
is triples of nodes A, B, C such that A and B are not
adjacent and are connected to C by the edges A →
C ← B.
Definition 2 (Instance) A DAG D is instance of an
arbitrary partially directed graph G if and only if :
• D and G have the same skeleton and the same v-
structures;
• D contain all the directed edges of G.
Definition 3 (Instantiable partially oriented graph)
A partially oriented graph is instantiable if and only
if it contains at less one instance.
The following definitions provide the rules for ori-
enting undirected edges (pseudo directed edges and
pseudo directed paths) and characterize the substruc-
tures of a partially directed graph that cannot be
instantiated (minimal undirected cycles, pseudo di-
rected cycles and colliding minimal chains).
Definition 4 (Pseudo directed edges) We say that
an undirected edge X − Y of a graph G is a pseudo
directed edge from X to Y , and we note X
→
− Y , if
X − Y occurs in at least one of the three configura-
tions of fig.2 as an induced subgraph of G.
LEARNING BAYESIAN NETWORKS WITH LARGEST CHAIN GRAPHS
185
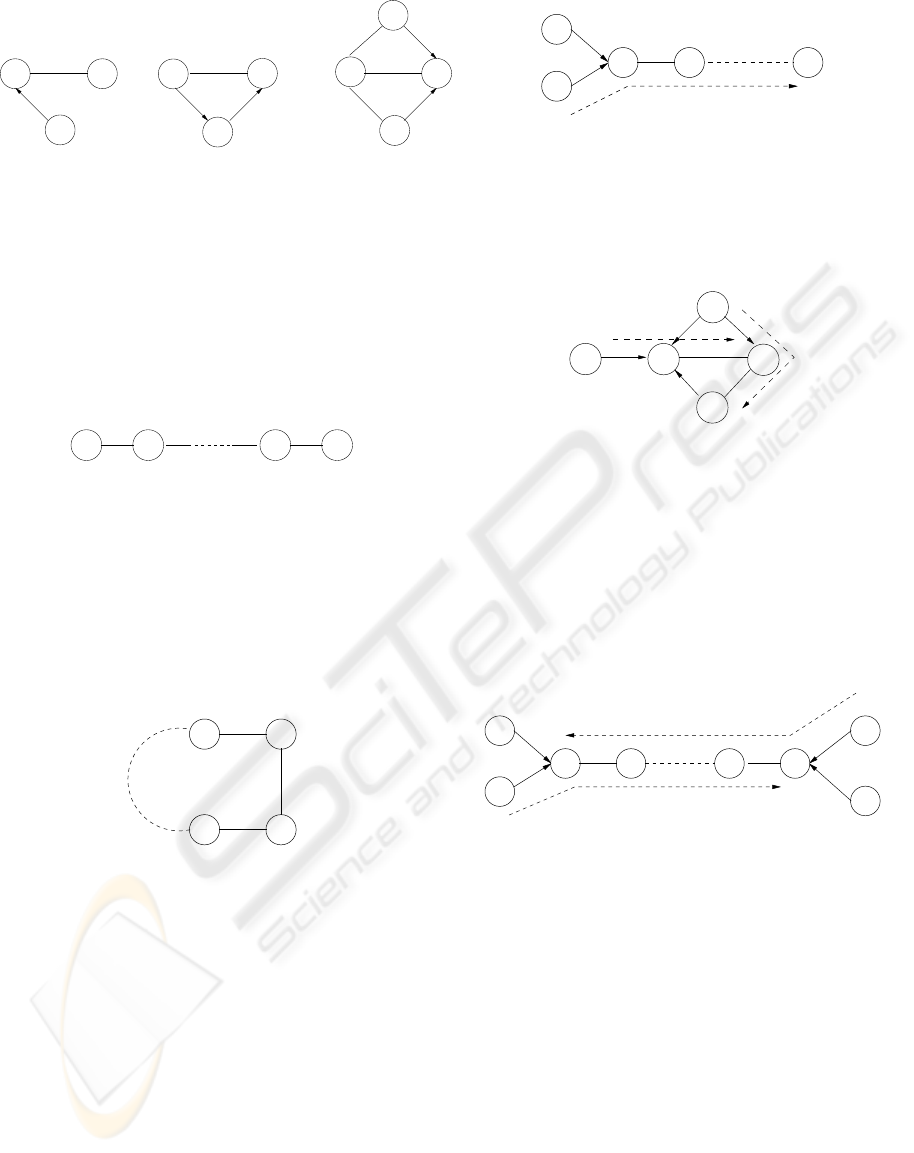
X
W
Z
YX
Z
YX
Z
Y
Figure 2: Possible configurations for pseudo directed edges
The orientation of pseudo directed edges is directly
imposed by the neighboring directed edges in order to
prevent directed cycles or spurious v-structures.
Definition 5 (Minimal chain) A succession of undi-
rected edges X
1
, . . . , X
n
is called a minimal chain if
X
i
, X
i+2
are not adjacent for any i ≤ N − 2.
X2X1 XnXn-1
Figure 3: Minimal chain
All edges belonging to the same minimal chain
have to be oriented in the same direction in order to
avoid the introduction of spurious v-structures.
Definition 6 (Minimal undirected cycle) A minimal
chain X
1
, . . . , X
n
is called a minimal undirected cy-
cle if X
N −1
= X
1
and X
n
= X
2
.
Xi
Xi+3 Xi+2
Xi+1
Figure 4: Minimal undirected cycle
Alternatively, an undirected cycle is minimal if it is
not chordal (chords may be directed). Since all edges
of a minimal undirected cycle have to be oriented in
the same direction, this kind of substructure cannot be
instantiated.
Definition 7 (Pseudo directed path) We say that a
minimal chain X
1
, . . . , X
n
is a pseudo directed path,
and we note X
1
,
→
. . ., X
n
if X
1
→
− X
2
.
The orientation of the pseudo directed edges have
to be propagated through the graph along the pseudo
directed paths.
Definition 8 (Pseudo directed cycle) A partially di-
rected cycle is called a pseudo directed cycle if all
the undirected edges of the cycle belong to pseudo
X1 X2 Xn
Figure 5: Pseudo directed path
directed paths oriented in the same direction as the
cycle.
Z
Y
V
X
W
Figure 6: Example of a pseudo directed cycle
Since all its undirected edges have to be oriented in
the same direction, a pseudo directed cycle cannot be
instantiated.
Definition 9 (Colliding minimal chain) A minimal
chain X
1
, . . . , X
N
is called a colliding minimal chain
if and only if X
1
,
→
. . ., X
N
and X
1
,
←
. . . X
N
.
X1
Xn
Xn−1X2
Figure 7: Colliding minimal chain
This kind of substructure cannot be instantiated
without introducing spurious v-structures.
The following quasi algorithmic theorem charac-
terizes instantiable graphs.
Theorem 2 A partially oriented graph, G, is instan-
tiable if and only if :
1. G does not contain any directed cycle;
2. G does not contain any pseudo directed cycle;
3. G does not contain any minimal undirected cycle;
4. G does not contain any colliding minimal chain.
It is obvious that the instances of an instantiable par-
tially oriented graphs are equivalent. So, the instan-
tiable partially oriented graphs generally represent
subsets of structures that belong to the same equiva-
lence classes and some instantiable partially oriented
ICEIS 2004 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
186

graphs can represent all the equivalence classes. In
fact, all the equivalence classes can be represented by
at least one instantiable partially oriented graph and
most of the equivalence classes can be represented by
several distinct instantiable partially oriented graphs.
In order to realize a bijection between the equiv-
alence classes and the instantiable partially oriented
graphs that represent them, some privileged represen-
tatives have been chosen. Two approaches are gener-
ally used:
1. A ” maximal ” representation for the directed
edges (and ”minimal ” representation for undi-
rected edges : the essential graphs
2. A ” maximal ” representation for the undirected
edges (and ”minimal ” representation for directed
edges : the largest chain
1
graphs
Definition 10 (Essential Graph EG) the essential
graph represented one equivalence class is a partially
oriented graph in which :
• edges that may appear in either direction in net-
works belonging to the same equivalence class are
represented as undirected edges;
• the other edges are represented as directed edges.
Definition 11 (Largest Chain Graph LCG) The
largest chain graph represented one equivalence
class is a partially oriented graph in which :
• each directed edge belonging to v-structures of the
DAGS that forms teh equivalence class is repre-
sented as a directed edge.
• the other edges are represented as undirected
edges.
We can immediately notice the intuitive charac-
ter of this second representation choice in contrast
with the first one. Indeed, it directly relies on the
equivalence classes characterization of Verma and
Pearl(theorem 1) : it suffices to indicate by directed
edges the v-structures and by undirected edges the re-
maining of the DAGs skeleton belonging to the equiv-
alence class.
The figure 8 illustrates the example of an instan-
tiable partially oriented graph (it exists at less one ori-
entation that doesn’t introduce a news v-structure or
directed cycle). The graph b is an example of an es-
sential graph (all the undirected edges can be oriented
in the two direction and, if any directed edge is ori-
ented in the reverses direction, alors it destroys or in-
troduces v-structures). The graph c, contains four di-
rected edges that form a v structure, is a largest chain
graph.
1
A chain graph is a partially oriented graph that does not
contain any directed cycle or any partially directed cycle.
We take this appellation for the historic reason, although the
chain graph concept (more restraining than the instantiable
partially oriented graph concept) is not used directly in this
paper
G
E
CB
H
B
F
D
A
F
cba
C
D
A
H
G
E
C
ED
A
H
G
F
B
Figure 8: Examples of intantiable partially oriented graph,
essential graph and largest chain graph
3 ALGORITHMIC ASPECTS OF
EQ-LCG
3.1 Global algorithmic structure
EQ-LCG basically uses the same strategy than EQ, as
presented in (Munteanu and Bendou, 2001). It uses
the exploration of the equivalence classes of bayesian
networks, by using evaluation function that gives the
same score for the equivalence structures (it is the
case for most modern evaluation functions ).
Since the largest chain graphs are instantiable par-
tially oriented graphs, the evaluation methods for the
transformation operators developed in the EQ frame-
work (based on fictional instanciations of the instan-
tiable partially oriented graph candidates) remains
also true. As shown in (Munteanu and Bendou,
2001), the natural transformation operations (addi-
tion/suppression of directed and undirected edge, ad-
dition of v-structure), can be evaluated in an eco-
nomic manner by calculating a reduced number of lo-
cal scores.
In algorithmic terms, the first EQ-LCG advantage
against EQ is the use of the chain graph that consider-
ably simplifies the post-treatments applied after each
transformation operation (see section 3.3).
Another important difference between EQ-LCG
and EQ are the constraints of transformation opera-
tions applicability. In EQ, we took a part of a theo-
ritical analysis (relatively complex) of each transfor-
mation operation in order to elaborate this applicabil-
ity constraints under declarative form. Even though
most of the c onstraints have a local expression that
make their verification very efficient, the constraint of
the absence of a directed cycle, often implies a global
analysis of the graph structure, is responsible of an
important part in the execution time. For this rea-
son, we decided to use in EQ-LCG, an algorithmic
approach, direct generalization of those used for the
verification of the circuit absence, that has the merit
to apply in a homogeneous manner to all considered
transformation operations. The details of this algo-
LEARNING BAYESIAN NETWORKS WITH LARGEST CHAIN GRAPHS
187

rithm, that verifies the applicability of a transforma-
tion operation by detecting the possible non instan-
tiable structures introduced by it, are presented in the
following section.
3.2 Instantiable structures detection
algorithm
The non-instantiable structure detection algorithm,
proposed here, is based on the characterization of the
partially oriented graphs previously presented. The
algorithm is called on two nodes that are implied in
the transformation operation candidate. It browses the
nodes of the network that are susceptible to belong to
non-instantiable substructure. The recursive calls are
directly imposed by the rules for orienting undirected
edges of the substructures proposed in section 2. Each
visited node is marked. If the same node is visited two
times, then the graph contains non-instantiable struc-
tures. The NextInStructure method has as input
two nodes : A and B. The node B is the current node
and the node A is the last visited node.
Algorithm 1 (”Instantiable structure detection (X,Y)”)
Begin
Mark the node X;
If NextInStructure (Y, X) then
The structure is not instantiable and end
Else the structure is instanciable
End
Algorithm 2 (”NextInStructure (B, A)”)
Begin
If (B is marked) then
Retour true
Mark the node B;
For each node ch child of B do
If NextInStructure(ch,B) then
The structure is not instantiable and end
For each node ch neighbor of B Do
If ch and A are disconnected then
If NextInStructure(ch,B) then
The structure is not instantiable and end
Else
If B - CH is pseudo directed edge then
If NextInStructure(ch,B) then
The structure is not instantiable
and end
Unmark then node B;
End
3.3 An application example : the
EQ-LCG3 algorithm
To ease the experimental evaluation of this theoriti-
cal and algorithmic framework, and its comparison to
EQ, we implemented an algorithm of EQ-LCG having
the same exploration method than EQ3 (Munteanu
and Bendou, 2001) in the space of equivalence classes
that will be called EQ-LCG 3.
EQ-LCG 3 uses the heuristic search method, which
explores the space largest chain graph by applying
greedy manner for the five transformation operators
defined as follows:
Let G be the current largest chain graph and G
0
the
transformed graph. Remember G
0
has to be largest
chain graph and the transformation has to be tiny.
The following subsections present five operators
which respect these conditions. In order to improve
the efficiency of the search algorithm we consider
here two different operators for the addition of di-
rected and undirected edges.
3.3.1 Operator 1: Addition of a directed edge
Definition
G
0
= Op1(G, X, Y ) = G ∪ {X → Y }
Constraints We will consider the application of this
operator only when G’ is an instatiable graph (then we
call ”Instantiable structure detection algorithm form
X to Y )
post-treatment when the directed edges X → Y
and Y → X produce the same greatest improvement
of the score, the undirected edge X − Y is added.
3.3.2 Operator 2: Addition of an undirected
edge
Definition
G
0
= Op2(G, X, Y ) = G ∪ {X − Y }
Constraints There is not constraints. This opera-
tor is applied when the addition of the directed edges
X → Y and Y → X are possible and produce the
same greatest improvement of the score.
Post-treatment The superfluous v-structures are
disoriented.
ICEIS 2004 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
188
3.4 Operator 3: Addition of
v-structure
Definition
G
0
= Op3(G, X, Y, Z) =
(G \ {Y − Z}) ∪ {X → Y } ∪ {Y ← Z}
This operator realizes the addition of a directed
edge together with the orientation of a previously
undirected edge.
Constraints We will consider the application of this
operator only when G
0
is an instatiable graph (then we
call ”Instantiable structure detection algorithm form
X to Y )
Post-treatment : nothing
3.5 Operator 4: Suppression
undirected edge
Definition
G
0
= Op4(G, X, Y ) = G \ {X − Y }
Constraints We will consider the application of this
operator only when G
0
is an instatiable graph (then we
call ”Instantiable structure detection algorithm form
X to Y )
Post-treatment : nothing
3.6 Operator 5: Suppression of
directed
Definition
G
0
= Op4(G, X, Y ) = G \ X → Y
Constraints We will consider the application of this
operator only when G
0
is an instatiable graph (then we
call ”Instantiable structure detection algorithm form
X to Y )
Post-treatment : All the superfluous v-structures in
Y are disoriented.
4 EXPERIMENTAL RESULTS
In order to evaluate the LCG algorithm perfor-
mances, we have compared it experimentally to clas-
sical greedy search and tabu search in the space of
Bayesian networks.
Tabu search uses a tabu list of 10 states and stops
after 10 consecutive iterations without score improve-
ment. All algorithms use the MDL score, as defined
in (Friedman and Goldszmidt, 1996).
The comparison has been realized on learning tasks
involving seven publicly available Bayesian networks
of various sizes: Cancer (1): 5 nodes, 5 edges, Asia
(2): 8 nodes, 8 edges, CarStarts (3): 18 nodes, 17
edges, Alarm (4): 37 nodes, 46 edges, and Hailfinder
(5): 56 nodes, 66 edges.
In order to improve the statistical significance of
the experimental results, we have compared the algo-
rithms on thirty different data sets for each network
(1,000 examples for the small networks Cancer, Asia,
and 10,000 for the others, generated according to the
probability distributions modeled by the networks).
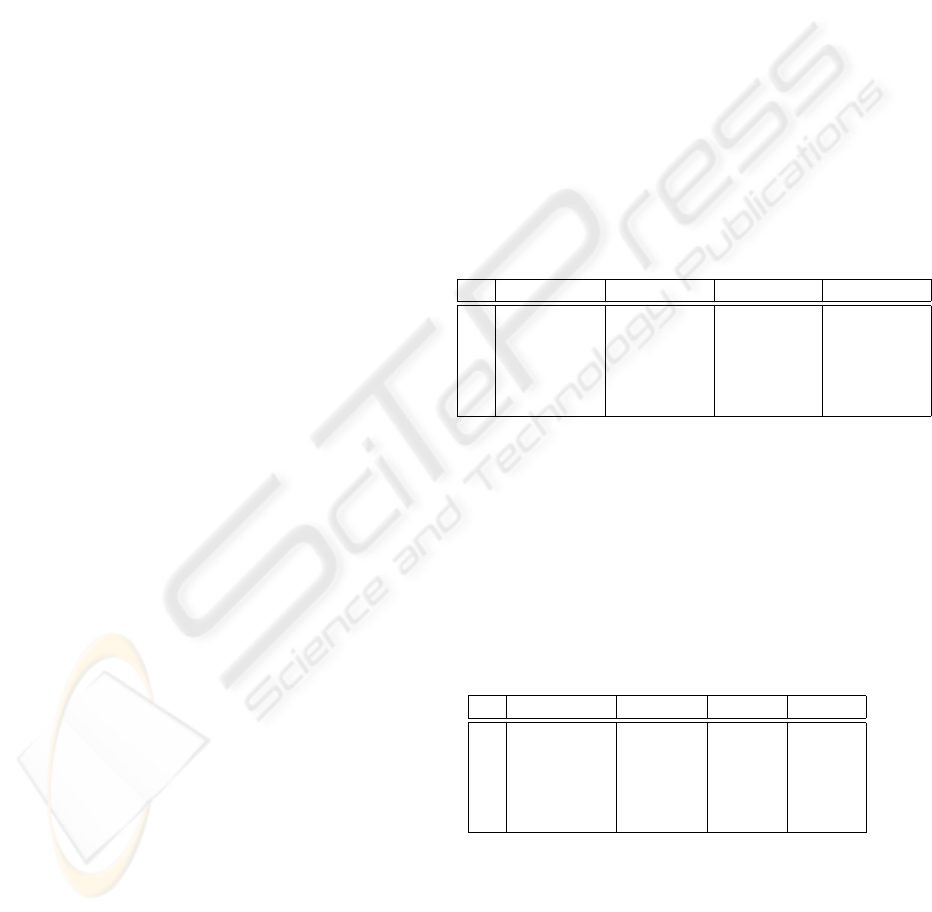
Table 1 presents the means of the score of the com-
pared algorithms (the MDL score has to be mini-
mized). The best results are presented in bold face.
Table 1: Scores
N GreedyBN TabuBN EQ LCG
1 3266.29 3262.61 3261.57 3261.57
2 3343.20 3336.69 3335.82 3335.82
3 33563.80 33553.79 33517.19 33517.19
4 139719.52 139558.86 139116,70 139116,70
5 720712.31 720383.23 720038.42 720038.42
Table 2 presents the comparison of the average ex-
ecution times of the four algorithms. They are all
programmed in Java, using the same base classes,
the same methods for computing scores and the same
caching schemas. The tabu list of TabuBN is imple-
mented as a hash table. The comparison has been re-
alized on a PIII 500Mhz CPU. The results are given
in seconds.
Table 2: Execution times
N GreedyBN TabuBN EQ LCG
1 0,23 0,25 bf 0,29 0,21
2 0,50 0,55 0,68 0,50
3 18,39 19,48 17,65 17,26
4 126,86 160,52 128,93 117,58
5 325,43 493,32 354,85 279,44
These results clearly show that EQ and LGC al-
gorithms are systematically more successful than
GreedyBN, and even TabuBN on non-trival tasks, for
execution times comparable to those of GreedyBN
and smaller than those of TabuBN. This experimen-
tal results also show that LCG approach drastically
simplifies the algorithms formulation and has some
LEARNING BAYESIAN NETWORKS WITH LARGEST CHAIN GRAPHS
189

beneficial aspects on their execution time than EQ al-
gorithm.
In terms of execution times, EQ-LCG3 confirms its
advantage against EQ 3, suggested by the algorithmic
analysis presented in the previous section. Although
the differences of execution time that may appear to
be weak, it is the first time, to our knowledge, that
learning algorithm in the space of equivalence classes
is faster (especially for big sized network) than the
classic greedy algorithm, that explores directly the
space of bayesian network structures.
5 CONCLUSION
In this paper, we presented a new theoretical and al-
gorithmic framework for the elaboration of bayesian
network learning algorithms in the space of equiva-
lence classes structures.
Based on largest chain graph, EQ-LCG allow to
drastically simplifies the algorithms formulation and
analyses and has some beneficial aspects on their ex-
ecution time.
The instantiable graph detection algorithm pro-
vides the means for the verification of the consistency
of the obtained largest chain graphs.
REFERENCES
Bendou, M. and Munteanu, P. (2002). Modles
graphiques semi-orients pour l’apprentissage des
rseaux baysiens”. EGC 2002, Montpellier.
Chickering, D. (1996). Learning equivalence classes of
bayesian-network structures. In Proc. of the 12th
Conf. on Uncertainty in Artificial Intelligence. Mor-
gan Kaufmann.
Friedman, N. and Goldszmidt, M. (1996). Learning
bayesian networks with local structure. In Proc. of the
12th Conf. on Uncertainty in Artificial Intelligence.
Morgan Kaufmann.
Frydenberg, M. (1990). The chain graph markov property.
Scandinavian Journal of Statistics, 17:333–353.
Munteanu, P. and Bendou, M. (2001). The eq framework for
learning equivalence classes of bayesian networks. In
Proc. of the 2001 IEEE International Conference on
Data Mining. IEEE Computer Society.
Spirtes, P., Glymour, C., and Scheines, R. (1993). Causa-
tion, Prediction and Search. Springer-Verlag.
Verma, T. and Pearl, J. (1990). Equivalence and synthesis
of causal models. In Proc. of the 6th Conf. on Uncer-
tainty in Artificial Intelligence. Elsevier.
ICEIS 2004 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
190
