
CAPTURING REQUIREMENTS VARIABILITY INTO
COMPONENTS
A goal driven approach
Sondes Bennasri, Carine Souveyet
Centre de recherche en informalique, 90 rue de Tolbiac, 75013 paris, France
Keywords: Variability, Customisable Software, R
equirement Engineering, Component
Abstract : Software Customisation also known as Software Variability is a central concept in the development of
different kinds of software such as product families or software for disabled people. The solutions proposed
in the literature to deal with the variability address design and implementation aspects like the mechanisms
that can be used to implement the variability in a software architecture. The representation of the variability
at a requirements level is neglected. Our contribution in this paper is to propose a goal driven approach that
captures the variability at requirements level and maps it into a component-based solution centred on the
concept of Customisable Component. An identification process is provided to assist the designer during the
identification and the conceptualisation of the customisable components. The approach is illustrated with
the Crews L’Ecritoire software.
1 INTRODUCTION
Today software companies are faced with the
challenge of producing software systems that meet
the needs of different kinds of users given the fact
that at the same time they must decrease their costs.
Thus, software should be sufficiently generic to
cover a wide range of customer needs, easily
adaptable to the requirements of a particular user
and based on the reuse of existing software assets to
reduce costs. This fact leads to the emergence of
so
ftware customisation (also called software
variability) which is defined as the ability of a
software system to be changed, customised or
configured to a specific context (Van Curp, 2000).
Users of this kind of software play a key role as the
success of the software depends on its ability to meet
the user specific needs. Thus, user requirements
should be considered at the first place during the
process of software customisation and also when
designing the customisable software.
In the first case, the customer is faced to a
m
ultitude of variants, he needs a global view of what
each variant does and its dependencies with other
variants without being lost in technical details. A
representation of the variants at the requirements
level facilitates the matching between his
requirements and the software functionality.
In the second case, identifying the variability at
th
e requirements level, assures that the designer is
building a product satisfying user needs and
provides a systematic way to document design
alternatives.
Unfortunately, as mentioned in (Halm
ans et al.,
2003) the representation of the variability at the
requirements level is neglected. In general, the
existing approaches such as (Bachmann et al.,
2001)(Bosch et al., 2001)(Svahnberg et al., 2001)
study the variability as a design problem and
concentrate on implementation aspects of system
variability.
We propose an approach that treats the
v
ariability from a requirements perspective. In this
paper, we limit ourselves to variability in
functionality. To identify the functionality variants,
we propose to use a goal-driven modelling
formalism called Map (Rolland, 2000) to capture the
variability through requirements analysis and to map
the variants into software components.
The choice of a component based solution to
i
mplement the variability is motivated by the desire
to avoid reinventing the wheel every time a new
system is developed but to package functions into
reusable blocks that can be simply and
straightforwardly integrated into new applications.
438
Bennasri S. and Souveyet C. (2004).
CAPTURING REQUIREMENTS VARIABILITY INTO COMPONENTS - A goal driven approach.
In Proceedings of the Sixth International Conference on Enterprise Information Systems, pages 438-443
DOI: 10.5220/0002638104380443
Copyright
c
SciTePress

Start
Stop
G
i
G
j
G
k
S
Start i
S
ij
S
jk1
S
jk2
S
k Stop
S
jj
C0 : <Start, G
i
, S
Start i
>
C1 : <G
i
, G
j
, S
ij
>
C2 : <G
j
, G
j
, S
jj
>
C3 : <G
j
, G
k
, S
jk1
>
C4 : <G
j
, G
k
, S
jk2
>
C5 : <G
k
, Stop, S
kStop
>
Figure 1 : A map
The reminder of the paper is structured as
follows. Section 2 introduces the map formalism and
the example that we choose to illustrate our
approach. In section 3, we discuss how the map is
used to represent the variability in functionality and
how the variants are mapped into components.
Finally, we draw some conclusions.
2 THE MAP FORMALISM
Our work is an extension of previous research
results for matching ERP functionality to customer
requirements (Rolland, 2000). We use the map to
capture the variability at requirements level and
implement them as software components.
A map is a process model expressed in a goal
driven perspective. It provides a system
representation based on a non-deterministic ordering
of goals and strategies. In the next sub-sections, we
introduce the key concepts of the map and we
present the example that we use to illustrate our
approach.
2.1 Map Concepts
A map is a labelled directed graph (see Figure 1)
with goals as nodes and strategies as edges between
goals. The directed nature of the graph shows which
goals can follow which one.
A Goal can be achieved by the performance of a
process. Each map has two special goals, Start and
Stop to start and end the process respectively.
A Strategy is an approach, a manner to achieve a
goal. The strategy S
ij
characterises the flow from the
source goal G
i
to the target goal G
j
and the way G
j
can be achieved once G
i
has been satisfied.
A Section is the key element of a map. It is a triplet
<G
i
, G
j
, S
ij
> and represents a way to achieve the
target goal G
j
from the source goal G
i
following the
strategy S
ij
. Each section of the map captures the
situation needed to achieve a goal and the specific
manner in which the process associated with the
target goal can be performed.
The sections of the map may be connected to each
others when :
a goal is achieved with different strategies.
This is represented in the map by several
sections between a couple of goals. Such a
map topology is called a multi-thread.
a goal can be achieved by the combination
of different strategies. This is represented in
the map by a couple of goals connected by
several sequences of sections. Such a
topology is called a multi-path. In general,
a map from its Start to its Stop goals is a
multi-path and may contain multi-threads.
As an example, consider the map of Figure 1, we
depict six sections C0 to C5. C3 and C4 form
together a multi-thread whereas {C1, C3} and {C1,
C4} are two paths between G
i
and G
k
that form a
multi-path.
2.2 An example
To illustrate our approach, we choose the sample of
the Crews L’Ecritoire system which is dedicated to
requirements elicitation (Tawbi, 2001). The map of
Figure 2 represents the functional requirements that
the system must fulfil to elicit requirements at a high
level by goals and strategies. Each section in the
map represents a requirement that the system must
satisfy. A functionality (depicted by Ci in the figure)
is attached to each section in the map to achieve the
related requirement.
As we can notice, the section allows a direct
coupling between a functional requirement and the
functionality to satisfy it. It is the means by which
we derive system functionality from functional
requirements.
In the reminder of the paper, we reference the
sections and their attached functionality by Ci. The
map is composed of four goals namely “Discover
goal”, “Conceptualise goal”and
CAPTURING REQUIREMENTS VARIABILITY INTO COMPONENTS: A goal driven approach
439

Variant
discovery
strategy
composition
strategy
Stop
Conceptualise
Scenario
Linguistic
strategy
computer based linguistic
strategy
manual strategy
Check
strategy
Start
Exploration strategy
Write
Scenario
initial goal
identification strategy
Discover Goal
refinement
strategy
Conceptualise
Goal
free prose
strategy
template driven
strategy
free prose
strategy
C1
C2
C3
C4
C5
C6
C7
C8
C9
C10
C13
C11
template driven
strategy
C12
Figure 2 : The Crews L’Ecritoire map
“Conceptualise scenario” which represent the four
steps that are followed to define requirements in
Crews L’Ecritoire. The ordering of the goals reflects
the principle of the bi-directional coupling of goals
and scenarios in Crews L’Ecritoire. Once a goal is
discovered, a scenario can be written to
operationalise the behaviour of the system. We can
also discover new goals from a scenario. Thus, the
goal “Discover goal” precedes the goal “Write
scenario”. However to discover goals from a
scenario, the scenario must be conceptualised that
means it is written in a particular form allowing to
automatically identify goals. This explains that the
goal “Conceptualise goal” precedes the goal
“Discover goal”. Similarly, before writing a
scenario, we may want to check the correctness of
the goal through a linguistic analysis that
reformulates its narrative description into a well
structured form in order to align the scenario to the
goal.
We shall notice different strategies from one goal
to another that depict different manners to fulfil a
goal. For example, there are two strategies to “Write
a scenario” either in free prose (C5) or by filling a
template (C12).
We can understand from this example, that the
variability in requirements is captured through the
different strategies proposed to satisfy the same
goal. Further details about the variability in maps are
provided in the next section.
3 VARIABILITY IN MAPS
3.1 Overview
We identify two kinds of variability in a map :
(i) a variability in the strategies used to
fulfil a goal
(ii) a variability in the combination of the
strategies to satisfy a goal
The first kind (i) is expressed by multi-thread
topology. It shows through the strategies the
different functionality provided to obtain the same
result. For example, the multi-thread composed of
{C12, C5} in Figure 2 depicts two alternative
functionality to write a scenario from a goal, either
by filling a template (C12) or in free prose (C5).
The second kind of variability (ii) is represented
by the multi-path topology. It shows to users the
several combination of functionality that they can
execute to satisfy their needs. For example, a user
interested in knowing how he can conceptualise a
scenario from a goal has several paths between the
couple of goals <Discover goal, Conceptualise
goal>. The user can conceptualise his goal (C2),
writes his scenario by selecting C4 or C3 then
conceptualises it through C6 or C7. He can also
decide to directly write the scenario by choosing
C12 or C5 and then conceptualising it based on C6
or C7. The first multi-path {C2, C4, C3, C6, C7} is
suitable when the user wants to check first the
correctness of his goal before writing the scenario in
order to ensure the adequacy of the scenario to the
goal whereas the second multi-path {C12, C5, C6,
C7} is followed when the goal is well written. If a
user selects the second multi-path, he has many
alternatives to write and conceptualise his scenario.
He can select one of the paths {C12, C6}, {C5, C6},
{C12, C7} or {C5, C7}.
As we notice, the user is confronted with a
multitude of alternatives. He can choose the best
combination of alternatives according to his level of
expertise in scenario writing.
For example, the path {C12, C6} is the best
alternative for a beginner that needs assistance
during the writing and the conceptualisation of the
scenario. The path {C5, C6} also addresses the
needs of beginners with less help during the scenario
writing. The paths {C12, C7} and {C5, C7} are
suitable for expert users.
ICEIS 2004 - INFORMATION SYSTEMS ANALYSIS AND SPECIFICATION
440

Variant
discovery
strategy
composition
strategy
Stop
Conceptualise
Scenario
Linguistic
strategy
computer based linguistic
strategy
manual strategy
Check
strategy
Start
Exploration strategy
Write
Scenario
initial goal
identification strategy
Discover Goal
refinement strategy
Conceptualise
Goal
free prose
strategy
template driven
strategy
free prose
strategy
CC1
C1
C2
C3
C6
C7
C8
C9
C10
C12
C11
C5
C4
template driven
strategy
C12
CC2
Figure 3 : Identification of customisable components
To sum up, the map represents the variability by
using the multi-thread and multi-path topologies
which describe the alternative functionality to satisfy
user needs at a high level based on goals and
strategies. However, representing the variability in
requirements is one part of the work, we need also to
document the variants such as the kind of users that
is suitable for a particular variant. The information
about the variants is captured by a document
attached to the map.
3.2 Identifying components
In order to bring the variability captured at
requirements level to the operational level, we
introduce the concept of “Customisable
Component”.
A Customisable Component (CC) is composed
of a set of functionality that operationalise a set of
sections expressing the variability by multi-threads
and multi-paths topologies leading to the
achievement of a goal.
A CC also contains the information needed during
its customisation according to specific needs such as
the rationale of a particular variant.
The CC may be implemented by an assembly of
existing software components or from scratch. In the
second case, the CC is an abstract specification of
functionality from which the designer can derive
software component-based solutions.
The issue related to the implementation of the
CC by software components is out of the scope of
this paper. We concentrate only on the capture of the
variability at requirements level and its
operationalisation via the CC.
In the example described in section 2.2, we
identify two CCs which are represented in Figure 3.
The process leading to their identification from the
map is explained in section 3.3.
The CC1 proposes two alternative ways to write a
scenario either through the conceptualisation of the
goal or directly by using a template or in free prose.
The CC2 captures the alternatives to discover goals
from a scenario. Three strategies are provided : by
refinement strategy (C10), by composition strategy
(C9) or by variant discovery strategy (C8). The first
strategy is used to discover goals by considering the
actions of the scenario as goals at a lower level. The
purpose of the user is to refine his goals into system
functionality. The second strategy aims to check the
completeness of the requirements specifications by
identifying the complementary goals and then
writing their related scenarios. The last strategy
discovers the alternative goals. It is useful to identify
exceptional scenarios.
In the next sub-sections, we show how we identify
the CCs from the map.
3.3 Process for identifying
customisable components
The identification of the CCs follows two steps
(i) Identification of the candidate goals supporting
the variability
(ii) Identification of the variants between each
couple of candidate goals
(i) Identification of candidate goals
We identify the goals that are important for the user.
We call them candidate goals. In our example, the
most important goals are “Discover goal” and
“Write scenario”. The goals “Conceptualise goal”
and “ Conceptualise scenario” are intermediary ones
that participate in the fulfilment of the important
goals.
CAPTURING REQUIREMENTS VARIABILITY INTO COMPONENTS: A goal driven approach
441
Linguistic
strategy
Write
Scenario
Discover Goal
Conceptualise
Goal
free prose
strategy
free prose
strategy
C2
C3
C4
C5
template driven
trategy
C12
c3 c4 c5c2 c12
MT1
MT2
template driven
strategy
MP1
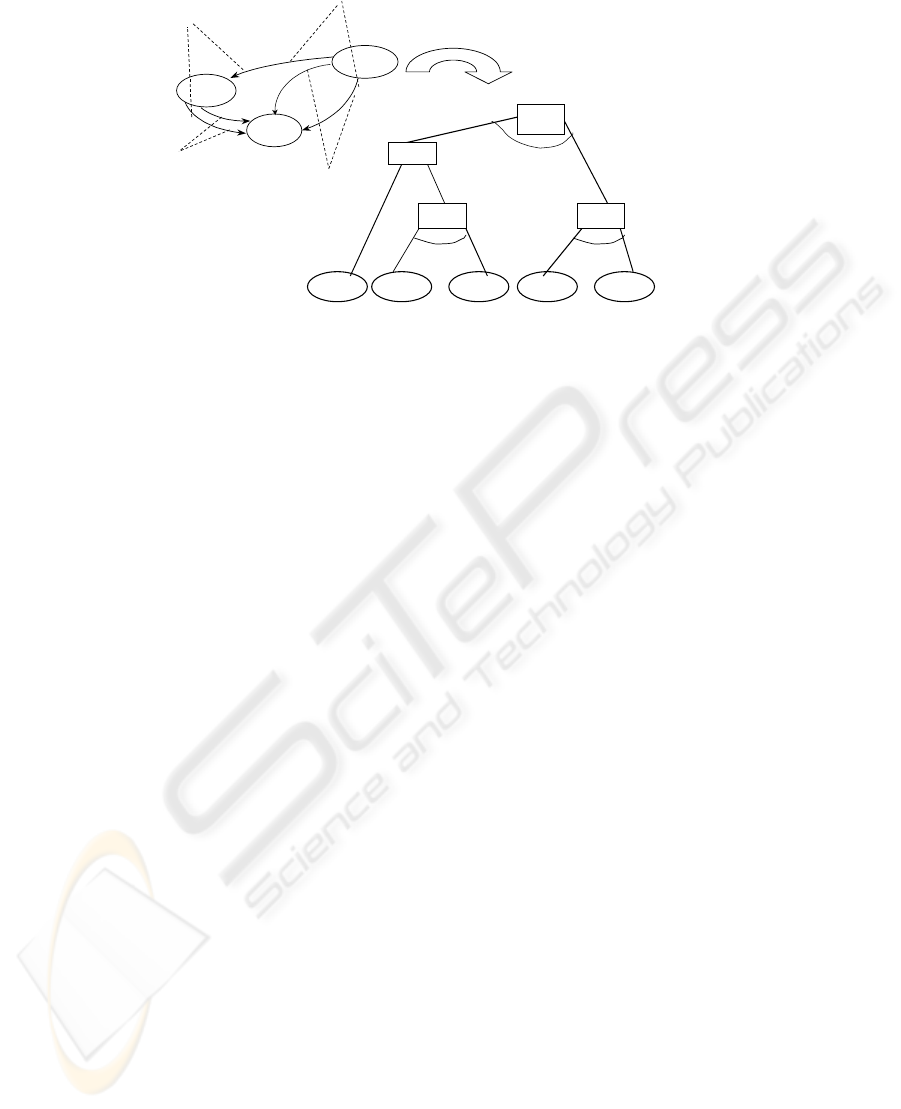
<<Choice Controller>>
<<Sequence Controler>>
CC1
XOR
OR OR
MT2 MT1
CC1
MP1
Mapping to a PAC architecture
<<Choice Controller>>
<<Choice Controller>>
Sub-map corresponding to the
customisable component CC1
<<executor>> <<executor>> <<executor>> <<executor>> <<executor>>
Figure 4 : Mapping a customisable component into a PAC like architecture
One heuristic to find the important goals in the map
is to identify the relevant states of the products that
the user wishes to obtain. In our example, the user is
interested in having goals and scenarios which are
the results of the fulfilment of the goals “Discover
goal” and “Write scenario”. Thus, the goals
“Discover goal” and “ Write scenario” are candidate
ones.
(ii) Identification of the variability between
couples of candidate goals
After identifying the candidate goals, we focus on
the dependencies between them. In our example, we
notice that in order to write a scenario we have to
discover a goal first. Thus, the goal “Discover goal”
must be realised before the goal “Write a scenario”.
We can also discover a goal from a scenario. In this
case, we have to satisfy the goal “Write a scenario”
before the goal “Discover a goal”. We identify two
couples of candidate goals that are: <Discover goal,
Write scenario> and <Write scenario, Discover
goal>. Each couple of goals is composed of a set of
alternatives. We associate a CC to each couple of
candidate goals.
We obtain the two CCs represented in Figure 3.
Once the customisable components are identified,
we conceptualise them and organise them into a
component architecture
3.4 Customisable component
architecture
The CC is mapped to a component architecture
which is a refinement of the Presentation-
Abstraction-control (PAC) architecture (Buschmann
et al., 1996).
The PAC architecture structures an application
into a hierarchy of agents. Every agent consists of
three components : presentation, abstraction and
control. This subdivision separates the human-
computer interaction aspect (encapsulated in the
presentation component) of the agent from its
functional core (the abstraction component) and its
communication with the other agents (the control
component).
We find that the PAC architecture allows to support
the variability at an architectural level by defining
the variants as modular entities that can be
composed into several ways according to user needs.
Moreover, the PAC architecture facilitates the
evolution of its sub-elements. The evolution
concerns :
(a) the agents: they are easily identified thanks
to the precise role affected to them in the
architecture
(b) the reorganisation of the agents and the
introduction of new ones: in this case, the
simplicity of the interaction schema between
the agents facilitates the evolution.
To map a CC into a PAC architecture, we
introduce two kinds of agents : the controllers and
the executors
An executor is a self-contained semantic unit that
provides a functionality.
A controller co-ordinates the lower-level agents that
may be executors or controllers. We distinguish two
kinds of controllers : the choice controllers that
control the selection of the suitable child agent and
the sequence controllers that manage the sequential
execution of their children. Figure 4 shows how a
CC is structured within a PAC architecture.
Each section Ci in the CC is mapped to an executor
having the same name. It represents a functionality
variant.
ICEIS 2004 - INFORMATION SYSTEMS ANALYSIS AND SPECIFICATION
442

The multi-threads and multi-paths are managed by
controllers. We identify three choice controllers
MT1, MT2 and CC1 corresponding respectively to
the multi-threads {C12, C5}, {C4, C3} and the
multi-path embodying the two alternatives paths
{C2, C3, C4} and {C12, C5}.
A sequence controller, identified in Figure 4 by MP1
is added to manage the multi-path composed of {C2,
C3, C4}. Once the PAC architecture is defined, the
interfaces of the controllers and the executors are
specified. The PAC hierarchy is then implemented
by a set of software components.
4 CONCLUSION
In our work, we use the requirements analysis as an
input to capture requirements variability and to
derive a component-based solution.
In our approach, we propose to capture the
variability at the requirements level using the multi-
thread and the multi-path topologies. The former
shows the different manners to satisfy the same goal
whereas the later captures the alternative paths
leading to the satisfaction of a goal.
The variability identified at the requirements level is
operationalised by a direct coupling between a
requirement (a section of a map) and a functionality
to achieve it.
Our approach is also driven by the component
paradigm, we introduce the concept of Customisable
Component that is a conceptual concept to describe
the variability captured at the requirements level, at
a conceptual level and to derive software component
based solutions.
The originality of our work consists of dealing
with variability from a requirements perspective.
However, our approach is a work in progress.
In the literature, there are few works addressing the
variability from a requirements perspective. We
distinguish the proposal of (Hui et al., 2003) where
the variability is captured through goal analysis
using the AND/OR decompositions. The alternative
goals (expressed by the OR links) help reasoning
about the alternative functionality to achieve a
parent goal. However, the exploration of the
alternative combinations of functionality across the
entire AND/OR goal graph is more difficult.
We find that maps, as means for describing
alternative complex assembly of functionality, can
help in this exploration. The multi-thread topology
of maps corresponds to the OR link in a goal graph.
In addition, the multi-path topology helps reasoning
about the alternative assemblies of functionality.
Our future work consists in (a) detailing the rules
to map a customisable component into a set of
software components and (b) providing the approach
to build systems using the customisable components.
REFERENCES
Bachmann et al., 2001. Managing variability in software
architecture. ACM Press, NY, USA, 2001.
Bosch et al., 2001. Variability issues in Software Product
Lines. 4th International Workshop on Product Family
Engineering (PEE-4), Bilbao, Spain, 2001.
Buschmann et al., 1996. A system of patterns. Pattern-
oriented software architecture. Wiley, 1996.
Halmans et al., 2003. Communicating the variability of a
software product family to customers. Software and
System Modeling, Springer-Verlag 2003.
Hui et al., 2003. Requirements Analysis for Customizable
software : A Goal-Skills-Preferences Framework. 11
th
International Requirement Engineering Conference,
2003.
Rolland C., 2000. Bridging the gap between
Organizational needs and ERP functionality.
Requirements Engineering journal, 2000.
Svahnberg et al., 2001. On the notion of variability in
Software Product Lines. Proceedings of the Working
IEEE/IFIP Conference on Software architecture, 2001.
Tawbi M.,2001. Crews L’Ecritoire : un guidage outillé du
processus d’Igenierie des besoins, PHD thesis, Paris1,
2001.
Van Gurp J., 2000. Variability in Software Systems, the
key to Software Reuse. Licentiate Thesis, University
of Groningen, Sweden, 2000.
CAPTURING REQUIREMENTS VARIABILITY INTO COMPONENTS: A goal driven approach
443
