
An Hybrid Approach for Spoken Natural Language
Understanding Applied to a Mobile Intelligent Robot
Mário Rodrigues
1
, António Teixeira
2
, and Luís Seabra Lopes
2
1
Escola Superior de Tecnologia e Gestão de Águeda, Universidade de Aveiro,
3754-909 Águeda, Portugal
2
Departamento de Electrónica e Telecomunicações/IEETA, Universidade de Aveiro,
3810-193 Aveiro, Portugal
Abstract. The greater sophistication and complexity of machines increases the
necessity to equip them with human friendly interfaces. As we know, voice is the
main support for human-human communication, so it is desirable to interact with
machines, namely robots, using voice. In this paper we present the recent evo-
lution of the Natural Language Understanding capabilities of Carl, our mobile
intelligent robot capable of interacting with humans using spoken natural lan-
guage. The new design is based on a hybrid approach, combining a robust parser
with Memory Based Learning. This hybrid architecture is capable of performing
deep analysis if the sentence is (almost) completely accepted by the grammar,
and capable of performing a shallow analysis if the sentence has severe errors.
1 Introduction
Recent developments For these robots to emerge it’s essential the development of nat-
ural language interfaces, regarded as the only acceptable for a high level of interac-
tion [1]. Voice allows hands free communication even without visual contact, great
advantages if the machine is a mobile robot. In this line of research, we are develop-
ing a mobile intelligent robot named Carl. Currently the development of such robots
is still a challenge due to limitations of current technologies and the nature of input
information: speaker independent speech recognition is not very reliable, even in quiet
environments; performance degrades considerably with background noise; spontaneous
spoken language is often highly disfluent.
The use of spoken language interfaces in robots requires analysis components robust
to various types of disfluencies that can extract the most complete interpretation possi-
ble from a given input, grammatically correct or not [2]. It would be of little application
a robot that in all the cases the speech recognizer makes an error doesn’t react.
In this paper we present the current status of the spoken natural language interface of
robot Carl focusing in our implementation of a robust Natural Language Understanding
(NLU) module. We start by a brief presentation of the robot, in Section 2. Next, in
Section 3 we describe the previous NLU modules, for an easier understanding of our
new approach. The new approach is presented in Section 4, and results obtained with
these new developments are the object of Section 5. Paper ends with results discussion
and indications of ongoing and future work.
Rodrigues M., Teixeira A. and Seabra Lopes L. (2004).
An Hybrid Approach for Spoken Natural Language Understanding Applied to a Mobile Intelligent Robot.
In Proceedings of the 1st International Workshop on Natural Language Understanding and Cognitive Science, pages 145-150
DOI: 10.5220/0002667001450150
Copyright
c
SciTePress

2 Robot Carl
Carl is based on a Pioneer 2-DX indoor platform from ActivMedia Robotics. This mo-
bile platform includes an on-board Pentium based computer. A fiberglass structure was
added on the top of the mobile platform, making Carl 1.10 m tall. It carries a laptop
computer, a microphone array, a speaker and a webcam.
With this platform we are developing an autonomous robot capable of navigate in
unstructured environments, making decisions, executing tasks and learning. Human-
robot communication is achieved through spoken and written language dialog as well as
touch interactions. High-level reasoning, including inductive and deductive inference,
is mostly based on the Prolog inference engine.
2.1 Speech Interface Goals
The goal Carl’s speech interface is to map each sentence to one of the performatives
from the Human Robot Communication Language (HRCL) (defined in [1]). For exam-
ple, a sentence like “Turn left.” should result in performative Achieve().
Carl is a robot designed to wander autonomously in an indoor environment inter-
acting with English speaking humans, so the speech interface must be robust enough to
allow the robot to engage communication with any person anywhere.
The communication with any person implies a user independent speech recognizer.
The voice models of such recognizers are not so specific as the ones of user dependent
systems and their performance is not as good, but they are more suitable to be used
by a broader population. Communicating anywhere implies that Carl has to operate in
uncontrolled environments like exhibition pavilions where the background noise level
can be very high. This fact makes the speech recognition an even more difficult task to
accomplish.
These conditions make the task of finding the appropriate HRCL performative from
each spoken sentence a challenging problem. The first step is to determine the recog-
nized sentence performative type. After that, semantic information must be extracted in
order to fill the HRCL message to pass to the reasoning module of the robot [3].
3 Previous Approaches
In one of the first versions of the voice interface, IBM ViaVoice ASR performed speech
recognition and the NLU module was built with CPK-NLP tools. Both speech recog-
nition and NLU used a unification grammar defined in Augmented Phrase Structure
Grammar (APSG) formalism.
With this approach each recognized sentence had a valid analysis. However, codi-
fying the linguistic knowledge as a set of rules is a labor-intensive task. Also, with the
grow of the grammar it becomes increasingly difficult to maintain and expand the rule
set. Another problem is that the speech recognition is performed based on a rigid set of
possible sentences. If the user does not pronounce a sentence accepted by the grammar,
it is not possible to recognize it. Obviously, the goal of developing a friendly easy to
use robot was not accomplished, motivating a first change of approach.
146
The first step was to allow the recognizer to accept any word sequence. The ap-
proach with better tradeoff between flexibility and accuracy is to use an n-gram lan-
guage model in the speech recognizer. The use of n-grams allows any sequence of
words from the lexicon, while making some sequences more likely than others.
A new speech recognizer was selected, Nuance 8.0, and the grammar was built with
bigrams trained from the complete set of utterances of the previous grammar. A new
module based on the Attribute Logic Engine (ALE) [4]was developed. ALE still uses a
grammar in its syntactic and semantic analysis.
4 New Approach
Having a system that is good at understanding correct sentences, we decided to develop
a new system that makes use of the existing one in the cases it is adequate and uses a
new sub-module to handle the deficiencies. To be able to apply such a divide to conquer
approach, we first developed a module capable of deciding if the speech recognizer
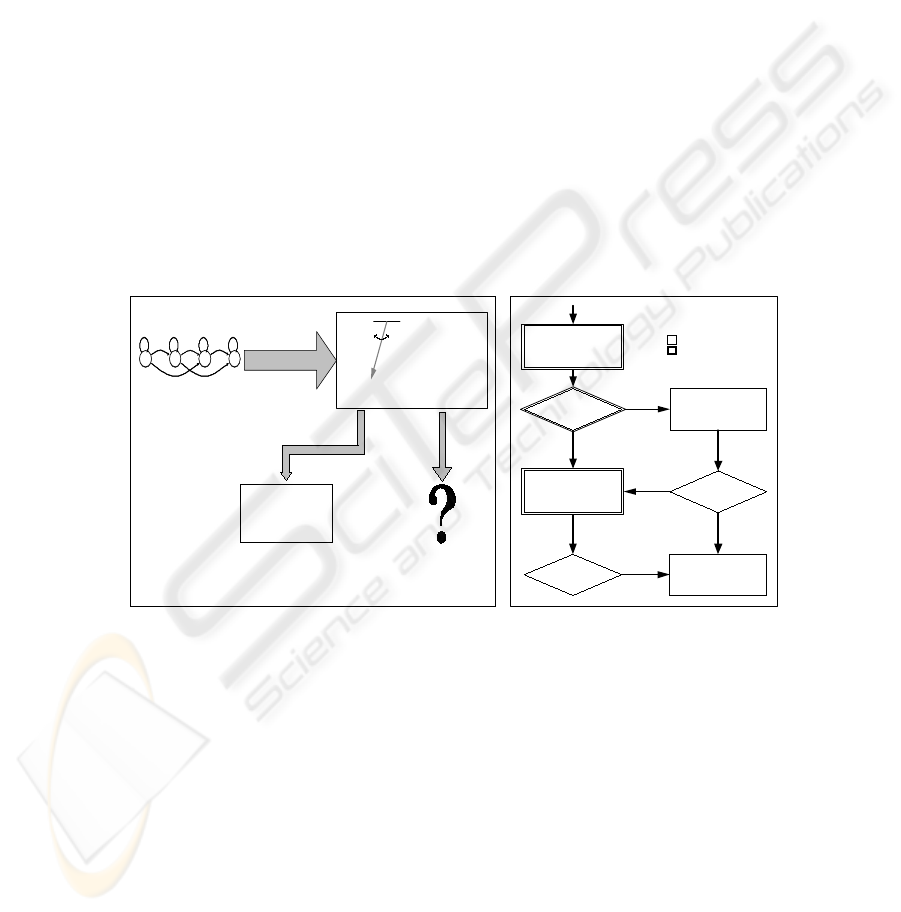
output was adequate to be processed by ALE. The system at this stage is represented in
Fig. 1(a). After that, we worked on the semantic analysis of badly structured sentences.
Then we replaced ALE by a more flexible parser.
11
p
22
p
33
p
44
p
12
p
23
p
34
p
13
p
24
p
11
p
22
p
33
p
44
p
12
p
23
p
34
p
13
p
24
p
11
p
22
p
33
p
44
p
12
p
23
p
34
p
13
p
24
p
Speech Recognizer
word
1
,...,word
N
Memory-Based
Learning (MBL)
Sentence non-Sentence
Attribute-Logic
Engine
The other
utterances?
Forget?
(a) A first stage in the development
word POS tagging
sentence is
gramatical?
parser
shallow analysis
no
yes
score >
threshold?
no
Legend:
knowledge based
data based
score >
threshold?
yes
yes
semantic
information
extraction
sentence
(b) Complete version
Fig. 1. Our new natural language interface approach scheme
4.1 Sentence/Non-sentence Decision
For this sub-problem, a Memory-Based Learning (MBL) approach was adopted. The
classification program TiMBL [5] was used. Words coming from the speech recognizer
are complemented with part-of-speech (POS) tags. With 762 examples in the training
set, correct decisions are above 90%. 3000 examples were enough to obtain 95% correct
decisions [3].
This success motivated us to extend the importance and the amount of information
extracted with MBL approach.
147

4.2 Robust Parsing
Another instance of TiMBL was used to extract information from the previously ignored
sentences. However, MBL is not suitable for a deep syntactic analysis, and so, even for
sentences that only slightly deviate from the grammar, it was only possible to perform
shallow analysis. Also, traditional parsing algorithms as the ones of CPK-NLP and
ALE are designed to parse only completely grammatical input sentences. It is desirable
to have a tool that in the presence of a sentence with a small deviation from the grammar
is able to perform a deep analysis: a robust parser.
Because the robust parsers are able to parse also completely correct sentences, such
a tool could replace ALE. Tests are being made to a parser called LCFLEX[6]. LCFLEX
is a flexible left-corner parser designed for efficient robust interpretation that uses the
Lexical Functional Grammar (LFG) formalism for grammar definition. It supports word
skipping, insertion of non-terminal grammar rules and selective flexible feature unifica-
tion.
4.3 The New System
To build the syntactic structure of a sentence, the information used is the role of each
word in the sentence and not the word itself so the lexical entries of the grammar used
by LCFLEX are POS tags instead of words. The POS tags are assigned on-the-fly by
two taggers: Brill Tagger [7] and LTPOS [8]. The reason for using two taggers is that
no tagger has 100% accuracy. If both taggers assign the same tag, the system considers
that the tag is correct; otherwise the system it treats specially the word and the sen-
tence. Both taggers use the Penn Treebank tagset that has 36 tags, so the lexicon of
our grammar has just 36 entries which allows us to have a very small, easy maintained
grammar.
The new natural language interface architecture is represented in Fig. 1(b). First
a module determines the POS tags of the words of the sentence. Then an instance of
TiMBL decides if the sentence retrieved by the speech recognizer is grammatical or
not. If both taggers agree in more than 75% of the tags and the sentence is grammatical,
the sentence is passed to LCFLEX to perform a deep syntactic analysis, otherwise it is
passed to another instance of TiMBL that makes a shallow analysis. Since the decision
made by the first instance of TiMBL as an error of around 5% ([3]), LCFLEX can receive
some incorrect sentences. Usually these sentences are almost grammatical and LCFLEX
is capable of analyse them.
If the sentence syntactic structure returned by LCFLEX includes more then 75% of
the total words of the sentence, the threshold, the analysis is passed to the semantics ex-
traction module. Otherwise the system considers that the sentence has a great deviation
from the grammar and the final analysis is shallow and made by the second instance of
TiMBL. This instance of TiMBL can also ignore the sentence if it cannot get a valid
analysis.
If the speech recognizer passes more than one hypothesis to the NLU module, in or-
der to have the best global solution, every hypothesis is analyzed and the partial scores
are collected. The partial scores are, if applicable, the percentage of equal tags assigned
148

by both taggers, first and second TiMBL instances scores and percentage of words in-
cluded in sentence syntactic structure returned by LCFLEX. TiMBL scores are computed
as the ratio between the number of neighbors of the most frequent valid sentence class
and the number of neighbors of the most frequent class. In the end of the analysis, the
partial scores are weighted with the speech recognition score and the best overall scored
analysis is chosen.
With this hybrid architecture we have developed an interface capable of performing
deep analysis if the sentence is completely or almost completely accepted by the gram-
mar, and capable of performing a shallow analysis if the sentence has severe errors.
5 Some Results
In Table 1 we present a summary of a preliminary test of the new proposed approach. A
total of 162 sentences from a randomly selected list generated from the ALE grammar
was read aloud by one speaker in an environment with some background noise (a com-
mon research laboratory). In average each sentence had 5.53 words. The speech recog-
nizer used was the Nuance with bigrams language model. The first two best alternatives
were kept from Nuance. Only 13 times in these alternatives the intended sentence was
present without errors. Speech Recognizer errors are presented in Table 1(a). The Word
Error Rate (WER) shows that speech recognizer results are full of errors.
Table 1. Test results
(a) Speech Recognizer errors
replaced
deleted
inserted
WER
1.21
0.56
0.69
44.42
(b) Robust parser results
adequate
processed
processed
sentences
to ALE
by LCFlex
by TiMBL
with analysis
21
50
20
70
(c) Detailed analysis of sentence
type results
total
LCFlex
TiMBL
correct
52
37
15
incorrect
18
13
5
A little more than the 13 correct sentences at the speech recognizer output were
adequate to be processed by ALE. The 8 (21 − 13 = 8) incorrect sentences processed
by ALE came from subtle changes, especially in articles. At the end, Table 1(b), our
system obtained analysis for 70, an 233.33% increase.
Regarding type of sentence, 52 of the 70 were correct. Partial results from TiMBL
and LCFLEX are presented in Table 1(c). It is also interesting to look at the constructed
semantic relations. In 209 constructed relations 156 were judged by a human as correct.
Relations constructed for sentences accepted by ALE were correct in 59 of a total of 60
cases. The failure was also made by ALE due to the loss of a coordinative conjunction.
After passing all the processing, the system was incapable of extracting any infor-
mation from 27 sequences.
149

6 Conclusion
In this paper we presented the recent evolution of the NLU module of the mobile intel-
ligent robot Carl. This new module is based on a hybrid approach combining a robust
parser with MBL-based modules to complement and select cases appropriate for the ro-
bust parser use. With this hybrid architecture we have developed an interface capable of
performing deep analysis if the sentence is completely or almost completely accepted
by the grammar, and capable of performing a shallow analysis if the sentence has severe
errors.
Results of a preliminary test performed indicate that our new approach is capable
of handling an increased number of word sequences coming from the speech recog-
nizer. For the sequences grammatically correct or almost correct, the new system has
a performance equivalent to the previous ALE based approach. Sentences with errors
are handled mainly by LCFLEX, but MBL contribution is not irrelevant. Results from
both ALE and MBL are around 74% correct regarding the type of performative, and
aprox. 75% regarding constructed semantic relations. It is clear from the results that
both components, MBL and the robust parser, perform a part of the task, contributing
to the overall performance.
As an ongoing work, many evolutions are possible. We consider as prioritary the
fine tuning of all the decision levels in the processing, improvement of the training
material for MBL bases tasks, better control of the LCFLEX flexibility parameters.
References
1. L. S. Lopes and A. Teixeira. Teaching Behavioral and Task Knowledge to Robots through
Spoken Dialogues. In S. LuperFoy and D. Miller, editors, My Dinner with R2D2: Natural
Dialogues with Practical Robotic Devices, AAAI-2000 Spring Symposium Series, pages 35–
43. Stanford University, Stanford, California, March 2000.
2. C. P. Rosé and A. Lavie. Balancing Robustness and Efficiency in Unification-Augmented
Context-Free Parsers for Large Pratical Applications. In J.-C. Junqua and G. van Noord,
editors, Robustness in Language and Speech Technology. Kluwer Academic Publishers, 2001.
3. L. Seabra Lopes, A. Teixeira, M. Rodrigues, D. Gomes, C. Teixeira, L. Ferreira, P. Soares,
J. Girão, and N. Sénica. Towards a Personal Robot with Language Interface. In Proc. Eu-
roSpeech, pages 2205–2208, 2003.
4. B. Carpenter and G. Penn. ALE - The Attribute Logic Engine User’s Guide. Technical report,
Department of Computer science of University of Toronto, 10 King’s Colledge Rd., Toronto
M5S 3G4, Canada, December 2001. http://www.cs.toronto.edu/ gpenn/ale/files.
5. W. Daelemans, J. Zavrel, A. van den Bosch, and K. van der Sloot. TiMBL: Tilburg Memory-
Based Learner Reference Guide, version 4.2. Technical report, P.O. Box 90153, NL-5000 LE,
Tilburg, The Netherlands, June 2002.
6. C. P. Rosé and A. Lavie. LCFlex: An Efficient Robust Left-Corner Parser. Technical report,
University of Pittsburgh, 1998.
7. E. Brill. Transformation-Based Error-Driven Learning and Natural Language Processing: A
Case Study in Part of Speech Tagging. Computational Linguistics, December 1995.
8. http://www.ltg.ed.ac.uk/ mikheev/tagger_demo.html.
150
