
DISTRIBUTED GRADIENT
FOR MULTI-ROBOT MOTION PLANNING
Gerasimos Rigatos
Unit of Industrial Automation
Industrial Systems Institute
26504, Rion Patras, Greece
Keywords:
multi-robot system, cooperative behavior, stochastic search algorithms, distributed gradient, Lyapunov stabil-
ity.
Abstract:
Distributed stochastic search is proposed for cooperative behavior in multi-robot systems. Distributed gradient
is examined. This method consists of multiple stochastic search algorithms that start from different points in
the solutions space and interact to each other while moving towards the goal position. Distributed gradient is
shown to be efficient when the motion of the robots towards the goal position is described by a quadratic cost
function. The algorithm’s performance is evaluated through simulation tests.
1 INTRODUCTION
In the recent years there has been growing interest
in multi-robot systems (Guo and Parker, 2002). As
the cost of robots goes down and as robots become
more compact the number of military and industrial
applications of multi-robot systems increases. Possi-
ble industrial applications of multi-robot systems in-
clude hazardous inspection, underwater or space ex-
ploration, assembling and transportation. Some ex-
amples of military applications are guarding, escort-
ing, patrolling and strategic behaviors, such as stalk-
ing and attacking.
Of primary importance in the design of multi-robot
systems is motion planning through obstacles. To
solve this problem distributed gradient algorithms
are proposed. These are an extension of the poten-
tial fields methods which have have been previously
used for robot path-planning (Khatib, 1986)-(Reif and
Wang, 1999). The potential of each robot consists of
two terms: (i) the cost V
i
due to the distance of the
i-th robot from the goal state, (ii) the cost due to the
interaction with the other M − 1 robots. Moreover,
a repulsive field, generated by the proximity to obsta-
cles, is taken into account. The differentiation of the
aggregate potential provides the kinematic model for
each robot. It is proved that the velocity update equa-
tion is equivalent to a distributed gradient algorithm.
The convergence to the goal state is studied with the
use of Lyapunov stability theory. It is shown that in
the case of a quadratic cost function V
i
the mean po-
sition of the multi-robot system converges to the goal
state x
∗
while each robot stays in a bounded area close
to x
∗
. These results are also of interest for research in
the area of particle systems where similar problems of
cooperative behavior are studied (Levine and Rappel,
2000).
The structure of the paper is as follows: In Section
2 elements of stochastic search algorithms are
summarized and distributed gradient is proposed for
multi-robot motion planning. Stability analysis of the
distributed gradient algorithms is performed with the
use of Lyapunov theory. In Section 3 the performance
of the distributed gradient algorithm in the problem
of multi-robot motion planning is tested through
simulation tests. Finally, in Section 4 concluding
remarks are stated.
2 DISTRIBUTED STOCHASTIC
SEARCH
Motion planning of multi-robot systems can be solved
with the use of distributed stochastic search algo-
rithms. These can be multiple gradient algorithms
that start from different points in the solutions space
and interact to each other while moving towards the
goal position. Distributed gradient algorithms, stem
59
Rigatos G. (2005).
DISTRIBUTED GRADIENT FOR MULTI-ROBOT MOTION PLANNING.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 59-65
DOI: 10.5220/0001154000590065
Copyright
c
SciTePress

from stochastic search algorithms treated in (Duflo,
1996) if an interaction term is added:
x
i
(t + 1) = x
i
(t) + γ
i
(t)[h(x
i
(t)) + e
i
(t)]+
P
M
j=1,j6=i
g(x
i
− x
j
), i = 1, 2, · · · , M
(1)
The term h(x(t)
i
) = −∇
x
i
V
i
(x
i
) indicates a local
gradient algorithm, i.e. motion in the direction of
decrease of the cost function V
i
(x
i
) =
1
2
e
i
(t)
T
e
i
(t).
The term γ
i
(t) is the algorithm’s step while the
stochastic disturbance e
i
(t) enables the algo-
rithm to escape from local minima. The term
P
M
j=1,j6=i
g(x
i
− x
j
) describes the interaction be-
tween the i-th and the rest M − 1 stochastic search
algorithms. Convergence analysis based on the
Lyapunov stability theory can be stated in the case of
distributed gradient algorithms. This is important for
the problem of multi-robot motion planning.
2.1 Kinematic model of the
multi-robot system
The objective is to lead a swarm of M mobile robots,
with different initial positions on the 2-D plane, to a
desirable final position. The position of each robot
in the 2-D space is described by the vector x
i
∈ R
2
.
The motion of the robots is synchronous, without time
delays, and it is assumed that at every time instant
each robot i is aware about the position and the ve-
locity of the other M − 1 robots. The cost function
that describes the motion of the i-th robot towards the
goal state is denoted as V (x
i
) : R
n
→ R. The value
of V (x
i
) is high on hills, small in valleys, while it
holds ∇
x
i
V (x
i
) = 0 at the goal position and at lo-
cal optima. The following conditions must hold: (i)
The cohesion of the swarm should be maintained, i.e.
the norm ||x
i
− x
j
|| should remain upper bounded
||x
i
− x
j
|| < ǫ
h
, (ii) Collisions between the robots
should be avoided, i.e. ||x
i
− x
j
|| > ǫ
l
, (iii) Conver-
gence to the goal state should be succeeded for each
robot through the negative definiteness of the associ-
ated Lyapunov function
˙
V
i
(x
i
) = ˙e
i
(t)
T
e
i
(t) < 0.
(Rigatos, et al., 2001). The interaction between the
i-th and the j-th robot is taken to be
g(x
i
−x
j
) = −(x
i
−x
j
)[g
a
(||x
i
−x
j
||)−g
r
(||x
i
−x
j
||)]
(2)
where g
a
() denotes the attraction term and is domi-
nant for large values of ||x
i
− x
j
||, while g
r
() denotes
the repulsion term and is dominant for small values of
||x
i
− x
j
||. Function g
a
() can be associated with an
attraction potential, i.e. ∇
x
i
V
a
(||x
i
− x
j
||) = (x
i
−
x
j
)g
a
(||x
i
− x
j
||). Function g
r
() can be associated
with a repulsion potential, i.e. ∇
x
i
V
r
(||x
i
− x
j
||) =
(x
i
− x
j
)g
r
(||x
i
− x
j
||). A suitable function g() that
describes the interaction between the robots is given
by (Gazi and Passino, 2004)
g(x
i
− x
j
) = −(x
i
− x
j
)(a − be
−||x
i
−x
j
||
2
σ
2
) (3)
where the parameters a, b and c are suitably tuned. It
holds that g
a
(x
i
− x
j
) = −a, i.e. attraction has a lin-
ear behavior (spring-mass system) ||x
i
− x
j
||g
a
(x
i
−
x
j
). Moreover, g
r
(x
i
− x
j
) = be
−||x
i
−x
j
||
2
σ
2
which
means that g
r
(x
i
− x
j
)||x
i
− x
j
|| ≤ b is bounded.
Applying Newton’s laws to the i-th robot yields
˙x
i
= v
i
m
i
˙v
i
= U
i
(4)
where the aggregate force is U
i
= f
i
+ F
i
. The term
f
i
= −K
v
v
i
denotes friction, while the term F
i
is
the propulsion. Assuming zero acceleration ˙v
i
= 0
one gets F
i
= K
v
v
i
, which for K
v
= 1 and m
i
= 1
gives F
i
= v
i
. Thus an approximate kinematic model
is
˙x
i
= F
i
(5)
According to the Euler-Langrange principle, the
propulsion F
i
is equal to the derivative of the total
potential of each robot, i.e.
F
i
= −∇
x
i
{V
i
(x
i
) +
1
2
P
M
i=1
P
M
j=1,j6=i
[V
a
(||x
i
−
x
j
|| − V
r
(||x
i
− x
j
||)]} ⇒ F
i
= −∇
x
i
{V
i
(x
i
)} −
P
M
j=1,j6=i
[∇
x
i
V
a
(||x
i
−x
j
||)−∇
x
i
V
r
(||x
i
−x
j
||)] ⇒
F
i
= −∇
x
i
{V
i
(x
i
)} +
P
M
j=1,j6=i
[−(x
i
−
x
j
)g
a
(||x
i
− x
j
||) + (x
i
− x
j
)g
r
(||x
i
− x
j
||)] ⇒
F
i
= −∇
x
i
{V
i
(x
i
)} +
P
M
j=1,j6=i
g(x
i
− x
j
).
Substituting in Eq. (5) one gets Eq. (1), i.e.
x
i
(t + 1) = x
i
(t) + γ
i
(t)[−∇
x
i
V
i
(x
i
) + e
i
(t +
1)] +
P
M
j=1,j6=i
g(x
i
− x
j
), i = 1, 2, · · · , M , with
γ
i
(t) = 1, which verifies that the kinematic model
of a multi-robot system is equivalent to a distributed
gradient search algorithm.
2.2 Stability of the multi-robot
system
The behaviour of the multi-robot system is deter-
mined by the behaviour of its center (mean of the
vectors x
i
) and of the position of each robot with
respect to this center. The center of the multi-robot
system is given by ¯x = E(x
i
) =
1
M
P
M
i=1
x
i
, there-
fore
˙
¯x =
1
M
P
M
i=1
˙x
i
⇒
˙
¯x =
1
M
P
M
i=1
[−∇
x
i
V
i
(x
i
)−
ICINCO 2005 - ROBOTICS AND AUTOMATION
60

P
M
j=1,j6=i
(g(x
i
− x
j
))].
From Eq. (3) it can be seen that g(x
i
−x
j
) = −g(x
j
−
x
i
), i.e. g() is an odd function. Therefore, it holds that
1
M
(
P
M
j=1,j6=i
g(x
i
− x
j
)) = 0, and
˙
¯x =
1
M
M
X
i=1
[−∇
x
i
V
i
(x
i
)] (6)
Denoting the goal position by x
∗
, and the distance
between the i-th robot and the mean position of the
multi-robot system by e
i
(t) = x
i
(t) − ¯x the objective
of distributed gradient for robot motion planning can
be summarized as follows: (i) lim
t→∞
¯x = x
∗
, i.e.
the center of the multi-robot system converges to the
goal position, (ii) lim
t→∞
x
i
= ¯x, i.e. the i-th robot
converges to the center of the multi-robot system,
(iii) lim
t→∞
˙
¯x = 0, i.e. the center of the multi-robot
system stabilizes at the goal position. If conditions (i)
and (ii) hold then lim
t→∞
x
i
= x
∗
. Furthermore, if
condition (iii) also holds then all robots will stabilize
close to the goal position.
It is known that the stability of local gradient algo-
rithms can be proved with the use of Lyapunov theory.
A similar approach can be followed in the case of the
distributed gradient algorithms given by Eq. (1) (Gazi
and Passino, 2004). The following simple Lyapunov
function is considered for each gradient algorithm:
V
i
=
1
2
e
i
T
e
i
⇒ V
i
=
1
2
||e
i
||
2
(7)
Thus, one gets
˙
V
i
= e
i
T
˙e
i
⇒
˙
V
i
= ( ˙x
i
−
˙
¯x)e
i
⇒
˙
V
i
= [−∇
x
i
V
i
(x
i
) −
P
M
j=1,j6=i
g(x
i
− x
j
) +
1
M
P
M
j=1
∇
x
j
V
j
(x
j
)]e
i
. Substituting g(x
i
−x
j
) from
Eq. (3) yields
˙
V
i
= [−∇
x
i
V
i
(x
i
) −
P
M
j=1,j6=i
(x
i
−
x
j
)a +
P
M
j=1,j6=i
(x
i
− x
j
)g
r
(||x
i
− x
j
||) +
1
M
P
M
j=1
∇
x
j
V
j
(x
j
)]e
i
⇒
˙
V
i
= −a[
P
M
j=1,j6=i
(x
i
−
x
j
)]e
i
+
P
M
j=1,j6=i
g
r
(||x
i
− x
j
||)(x
i
− x
j
)
T
e
i
−
[∇
x
i
V
i
(x
i
) −
1
M
P
M
j=1
∇
x
j
V
j
(x
j
)]
T
e
i
.
It holds that
P
M
j=1
(x
i
− x
j
) = Mx
i
−
M
1
M
P
M
j=1
x
j
= M x
i
− M ¯x = M(x
i
− ¯x) = M e
i
,
therefore
˙
V
i
= −aM ||e
i
||
2
+
M
j=1,j6=i
g
r
(||x
i
− x
j
||)(x
i
− x
j
)
T
e
i
−[∇
x
i
V
i
(x
i
) −
1
M
M
j=1
∇
x
j
V
j
(x
j
)]
T
e
i
(8)
It assumed that for all x
i
there is a constant ¯σ such
that
||∇
x
i
V
i
(x
i
)|| ≤ ¯σ (9)
Eq. (9) is reasonable since for a robot moving on a 2-
D plane, the gradient of the cost function ∇
x
i
V
i
(x
i
)
is expected to be bounded. Moreover it is known that
the following inequality holds:
M
X
j=1,j6=i
g
r
(x
i
− x
j
)
T
e
i
≤
M
X
j=1,j6=i
be
i
≤
M
X
j=1,j6=i
b||e
i
||
Thus the application of Eq. (8) gives
˙
V
i
≤aM||e
i
||
2
+
P
M
j=1,j6=i
g
r
(||x
i
− x
j
||)||x
i
− x
j
|| · ||e
i
|| +
||∇
x
i
V
i
(x
i
) −
1
M
P
M
j=1
∇
x
j
V
j
(x
j
)||||e
i
|| ⇒
˙
V
i
≤aM||e
i
||
2
+ b(M − 1)||e
i
|| + 2¯σ||e
i
|| where it
has been taken into account that
M
j=1,j6=i
g
r
(||x
i
−x
j
||)
T
||e
i
||≤
M
j=1,j6=i
b||e
i
|| = b(M −1)||e
i
||
and from Eq. (9)
||∇
x
i
V
i
(x
i
) −
1
M
P
M
j=1
∇
x
i
V
j
(x
j
)||≤
||∇
x
i
V
i
(x
i
)|| +
1
M
||
P
M
j=1
∇
x
i
V
j
(x
j
)||≤
¯σ +
1
M
M ¯σ ≤ 2¯σ
Thus, one gets
˙
V
i
≤aM||e
i
||·[||e
i
|| −
b(M − 1)
aM
− 2
¯σ
aM
] (10)
The following bound ǫ is defined:
ǫ =
b(M − 1)
aM
+
2¯σ
aM
=
1
aM
(b(M −1)+2¯σ) (11)
Thus, when ||e
i
|| > ǫ,
˙
V
i
will become negative and
consequently the error e
i
= x
i
− ¯x will decrease.
Therefore the error e
i
will remain in an area of radius
ǫ i.e. the position x
i
of the i-th robot will stay in the
cycle with center ¯x and radius ǫ.
2.3 Stability in the case of a
quadratic cost function
The case of a convex quadratic cost function is exam-
ined, for instance
V
i
(x
i
) =
A
2
||x
i
− x
∗
||
2
=
A
2
(x
i
− x
∗
)
T
(x
i
− x
∗
)
(12)
where x
∗
= [0, 0] is a minimum point
V
i
(x
i
= x
∗
) = 0. The distributed gradient al-
gorithm is expected to converge to x
∗
. The robotic
vehicles will follow different different trajectories on
DISTRIBUTED GRADIENT FOR MULTI-ROBOT MOTION PLANNING
61

the 2-D plane and will end at the goal position.
Using Eq.(12) yields ∇
x
i
V
i
(x
i
) = A(x
i
− x
∗
).
Moreover, the assumption ∇
x
i
V
i
(x
i
) ≤ ¯σ can be
used, since the gradient of the cost function remains
bounded. The robotic vehicles will concentrate round
¯x and will stay in a radius ǫ given by Eq. (11).
The motion of the mean position ¯x of the vehicles is
˙
¯x = −
1
M
P
M
i=1
∇
x
i
V
i
(x
i
) ⇒
˙
¯x = −
A
M
(x
i
− x
∗
) ⇒
˙
¯x − ˙x
∗
= −
A
M
x
i
+
A
M
x
∗
⇒
˙
¯x − ˙x
∗
= −A(¯x − x
∗
)
The variable e
σ
= ¯x−x
∗
is defined, and consequently
˙e
σ
= −Ae
σ
⇒ ǫ
σ
(t) = c
1
e
−At
+ c
2
(13)
with c
1
+ c
2
= e
σ
(0). Eq. (13) is an homogeneous
differential equation, which for A > 0 results into
lim
t→∞
e
σ
(t) = 0, thus lim
t→∞
¯x(t) = x
∗
. It is
left to make more precise the position to which each
robot converges.
2.4 Convergence analysis using La
Salle’s theorem
It has been shown that lim
t→∞
¯x(t) = x
∗
and
from Eq. (10) that each robot will stay in a cycle
C of center ¯x and radius ǫ given by Eq. (11). The
Lyapunov function given by Eq. (7) is negative
semi-definite, therefore asymptotic stability cannot
be guaranteed. It remains to make precise the area of
convergence of each robot in the cycle C of center ¯x
and radius ǫ. To this end, La Salle’s theorem can be
employed (Gazi and Passino, 2004), (Khalil, 1996).
La Salle’s Theorem: Assume the autonomous system
˙x = f(x) where f : D → R
n
. Assume C ⊂ D a
compact set which is positively invariant with respect
to ˙x = f(x), i.e. if x(0) ∈ C ⇒ x(t) ∈ C ∀ t
. Assume that V (x) : D → R is a continuous
and differentiable Lyapunov function such that
˙
V (x) ≤ 0 for x ∈ C, i.e. V (x) is negative semi-
definite in C. Denote by E the set of all points in
C such that
˙
V (x) = 0. Denote by M the largest
invariant set in E and its boundary by L
+
, i.e. for
x(t) ∈ E : lim
t→∞
x(t) = L
+
, or in other words
L
+
is the positive limit set of E. Then every solution
x(t) ∈ C will converge to M as t → ∞.
La Salle’s theorem in applicable in the case of the
multi-robot system and helps to describe more pre-
cisely the area round ¯x to which the robot trajectories
x
i
will converge. A generalized Lyapunov function
is introduced which is expected to verify the stability
analysis based on Eq. (10). It holds that:
V (x) =
P
M
i=1
V
i
(x
i
) +
1
2
P
M
i=1
P
M
j=1,j6=i
{V
a
(||x
i
−
x
j
|| − V
r
(||x
i
− x
j
||)} ⇒ V (x) =
P
M
i=1
V
i
(x
i
) +
1
2
P
M
i=1
P
M
j=1,j6=i
{a||x
i
− x
j
||
2
− V
r
(||x
i
− x
j
||),
and
∇
x
i
V (x) = [
P
M
i=1
∇
x
i
V
i
(x
i
)] +
1
2
P
M
i=1
P
M
j=1,j6=i
∇
x
i
{a||x
i
− x
j
||
2
− V
r
(||x
i
−
x
j
||)} ⇒ ∇
x
i
V (x) = [
P
M
i=1
∇
x
i
V
i
(x
i
)] +
P
M
j=1,j6=i
(x
i
− x
j
){g
a
(||x
i
− x
j
||) − g
r
(||x
i
−
x
j
||)} ⇒ ∇
x
i
V (x) = [
P
M
i=1
∇
x
i
V
i
(x
i
)] −
P
M
j=1,j6=i
g(||x
i
− x
j
||)
and using Eq. (1) with γ
i
(t) = 1 yields ∇
x
i
V (x) =
− ˙x
i
, and
˙
V (x) = ∇
x
V (x)
T
˙x =
P
M
i=1
∇
x
i
V (x)
T
˙x
i
⇒
˙
V (x) = −
P
M
i=1
|| ˙x
i
||
2
≤ 0
(14)
Therefore, in the case of a quadratic cost func-
tion it holds V (x) > 0 and
˙
V (x)≤0 and the set
C = {x : V (x(t)) ≤ V (x(0))} is compact and
positively invariant. Thus, by applying La Salle’s
theorem one can show the convergence of x(t) to the
set M ⊂ C, M = {x :
˙
V (x) = 0} ⇒ M = {x :
˙x = 0}.
2.5 Stability in the case of a cost
function with local minima
The following multi-modal Gaussian cost function is
considered
V
i
(x
i
) = −
N
X
j=1
A
j
2
e
−||x
i
−c
j
||
2
σ
j
2
(15)
where c
j
∈ R
n
is the center of the i-th Gaussian,
σ
j
∈ R
n
is the variance of the i-th Gaussian, and
A
j
∈ R defines if the Gaussian stands for hill (A
j
>
0) or a valley (A
i
< 0). The gradient of the multi-
modal Gaussian function in given by
∇
x
i
V
i
(x
i
) =
N
X
j=1
A
j
σ
j
2
(x
i
− c
j
)e
−||x
i
−c
j
||
2
σ
j
2
(16)
The velocity of the i-th robot is given by Eq.(1)
˙x
i
= −∇
x
i
V
i
(x
i
)−
−
M
j=1,j6=i
(x
i
− x
j
)[g
a
(||x
i
− x
j
||) − g
r
(||(x
i
− x
j
)||)]
(17)
ICINCO 2005 - ROBOTICS AND AUTOMATION
62
while the velocity of the center of the multi-robot sys-
tem is given by Eq. (6)
˙
¯x = −
1
M
∇
x
i
V
i
(x
i
) ⇒
˙
¯x = −
1
M
P
N
j=1
A
j
σ
j
2
(x
i
− c
j
)e
−||x
i
−c
j
||
2
σ
j
2
(18)
Eq. (18) does not give any information about the di-
rection of the center ¯x of the multi-robot system. Un-
der specific assumptions convergence to local minima
(valleys) or divergence from local maxima (hills) can
be shown. To this end , it is assumed that at t = 0
holds,
||x
i
(0) − c
k
||≤σ
k
, k : 1≤k≤N
||x
i
(0) − c
j
||≥σ
j
, k : 1≤j≤N
This means that the multi-robot system goes close to
the Gaussian with center c
k
and stays far from the
Gaussian with center c
j
. The following error defini-
tion is given
e
k
= ¯x − c
k
(19)
and the Lyapunov function V
k
=
1
2
e
k
T
e
k
is consid-
ered. It holds that
˙
V
k
= ( ˙e
k
)
T
e
k
⇒
˙
V
k
=
˙
¯x
T
e
k
⇒
˙
V
k
= [−
1
M
P
N
j=1
A
j
σ
j
2
(x
i
− c
j
)e
−||x
i
−c
j
||
2
σ
j
2
]e
k
Assuming that (x
i
−c
j
) < (e
k
)
T
, i.e. x
i
−c
j
< ¯x −c
k
,
i.e. the mean of the multi-robot system is closer to the
valley k yields
˙
V
k
< −
1
M
N
X
j=1
A
j
σ
j
2
e
−||x
i
−c
j
||
2
σ
j
2
||e
k
||
2
.
Therefore, for A
j
< 0 it holds that
˙
V
k
< 0 and the
multi-robot system will converge to the k-th Gaussian
center c
k
.
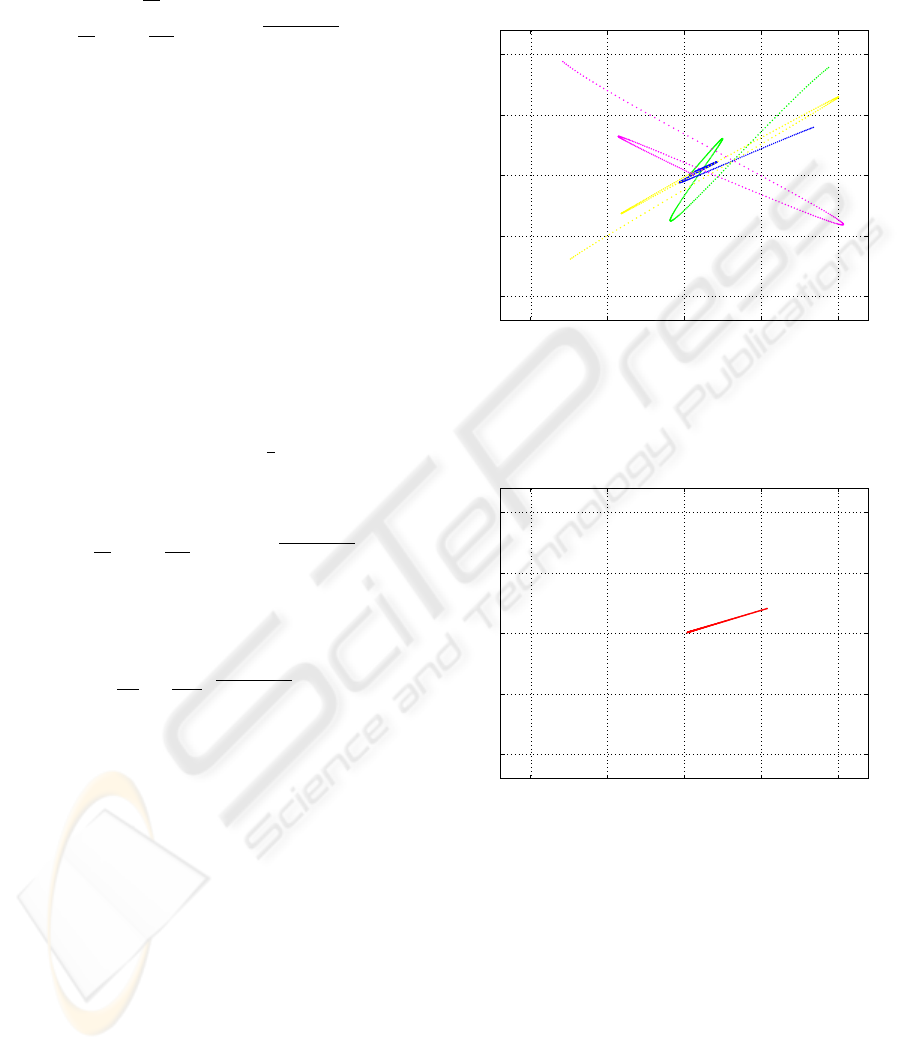
3 SIMULATION TESTS
In the conducted simulation tests the multi-robot sys-
tem consisted of 10 robots which were randomly ini-
tialized in the 2-D field. Two cases were distin-
guished: (i) motion in an obstacle-free environment
(Fig. 1 - Fig. 2 and (ii) motion in an environment
with obstacles (Fig. 5 - Fig. 6). The objective was
to lead the robot swarm to the origin [x, y] = [0, 0].
To avoid obstacles, apart from the motion equations
given in Sections 2 repulsive forces between the ob-
stacles and the robots had to be taken into account.
The reactive robot behavior for obstacle avoidance
prevailed locally the motion laws which were derived
using potential fields theory. This means that the col-
lision avoidance was set to higher priority than main-
tenance of the cohesion of the robots swarm.
−10 −5 0 5 10
−10
−5
0
5
10
X
Y
Figure 1: Motion of the individual robots in an obstacles-
free environment, considering a quadratic cost function.
−10 −5 0 5 10
−10
−5
0
5
10
X
Y
Figure 2: Motion of the mean of the multi-robot system in
an obstacles-free environment, considering a quadratic cost
function.
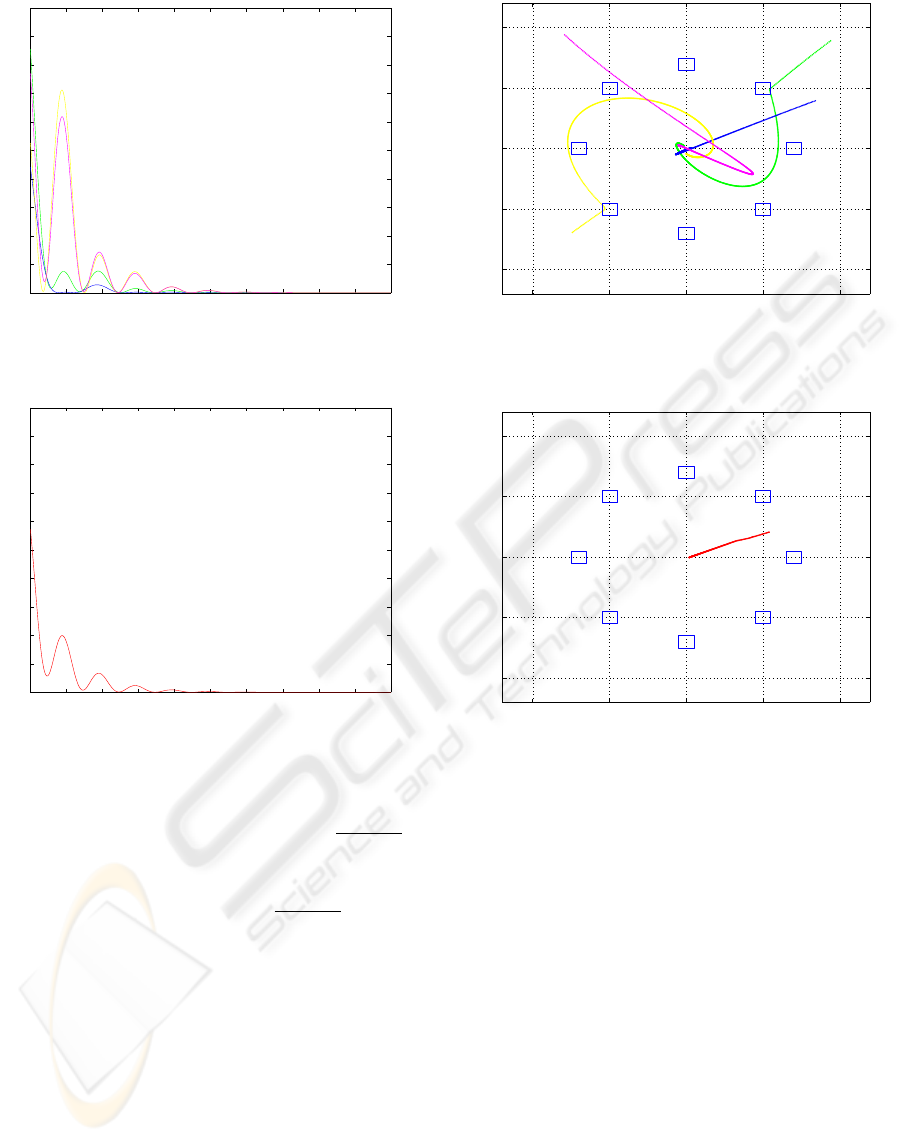
For the motion in an obstacle-free environment, the
evolution of the aggregate Lyapunov function of the
multi-robot system, as well as of the Lyapunov func-
tions of the individual robots, is depicted in Fig. 3 and
Fig. 4.
When the multi-robot system evolved in an envi-
ronment with obstacles, the interaction between the
individual robots (attractive and repulsive forces)
had to be loose, so as to give priority to obstacles
avoidance. Therefore coefficients a and b in Eq.
DISTRIBUTED GRADIENT FOR MULTI-ROBOT MOTION PLANNING
63
0 100 200 300 400 500 600 700 800 900 1000
0
10
20
30
40
50
60
70
80
90
100
time k
Lyapunov of the robots
Figure 3: Lyapunov function of the individual robots in an
obstacles-free environment.
0 100 200 300 400 500 600 700 800 900 1000
0
10
20
30
40
50
60
70
80
90
100
time k
Lyapunov of the mean
Figure 4: Lyapunov function of the mean of the multi-robot
system in an obstacles-free environment.
(3) g(x
i
− x
j
) = −(x
i
− x
j
)(a − be
||x
i
−x
j
||
2
σ
2
)
were set to small values. The repulsive po-
tential due to the obstacles was calculated by
g(x
i
− x
j
) = −(x
i
− x
j
o
)(a − be
||x
i
−x
j
o
||
2
σ
2
), where
x
j
o
was the center of the j-th obstacle.
The relative values of the parameters a and b that ap-
pear in the attractive and repulsive potential respec-
tively, affected the performance of the algorithm. For
a > b the cohesion of the robotic swarm was main-
tained and abrupt displacements of the individual ro-
bots were avoided.
For the motion in an environment with obstacles, the
evolution of the aggregate Lyapunov function of the
multi-robot system, as well as of the Lyapunov func-
tions of the individual robots, is depicted in Fig. 7
and Fig. 8 . Comparing to Fig. 3 and Fig. 4 the dif-
ferences are due to the smaller value of the attractive
force coefficient a.
−10 −5 0 5 10
−10
−5
0
5
10
X
Y
Figure 5: Motion of the individual robots in an environment
with obstacles, considering a quadratic cost function.
−10 −5 0 5 10
−10
−5
0
5
10
X
Y
Figure 6: Motion of the mean of the multi-robot system in
an environment with obstacles, considering a quadratic cost
function.
4 CONCLUSIONS
In this paper the problem of distributed multi-robot
motion planning was studied. A M -robot swarm was
considered and the objective was to lead the swarm
to a goal position. The kinematic model of the robots
was derived using the potential fields theory. The po-
tential of each robot consisted of two terms: (i) the
cost V
i
due to the distance of the i-th robot from the
goal state, (ii) the cost due to the interaction with the
other M − 1 robots. The differentiation of the poten-
tial provided the kinematic model for each robot. It
was proved that the velocity update equation is equiv-
alent to a distributed gradient algorithm. The con-
vergence to the goal state was studied with the use
of Lyapunov stability theory. It was shown that in the
case of a quadratic cost function V
i
the mean position
of the multi-robot system converges to the goal state
ICINCO 2005 - ROBOTICS AND AUTOMATION
64

0 100 200 300 400 500 600 700 800 900 1000
0
10
20
30
40
50
60
70
80
90
100
time k
Lyapunov of the robots
Figure 7: Lyapunov function of the individual robots in an
environment with obstacles.
0 100 200 300 400 500 600 700 800 900 1000
0
10
20
30
40
50
60
70
80
90
100
time k
Lyapunov of the mean
Figure 8: Lyapunov function of the mean of the multi-robot
system in an environment with obstacles.
x
∗
while each robot stays in a bounded area close to
x
∗
.
Distributed gradient for multi-robot motion planning
was evaluated through simulation tests. It was ob-
served that when the multi-robot system was evolving
in an environment with obstacles, the interaction be-
tween the individual robots (attractive and repulsive
forces) had to be loose, so as to give priority to obsta-
cles avoidance. The performance of the method was
satisfactory. The algorithm succeeded cooperative be-
havior of the robots without requirement for explicit
coordination or communication.
REFERENCES
Guo Y. and Parker L.E. (2002), A distributed and optimal
motion planning approach for multiple mobile robots,
In: Proc. 2002 IEEE Intl. Conference on Robotics and
Automation, Washington DC, May 2002, pp. 2612-
2619.
Khatib O. (1986), Real-time obstacle avoidance for manip-
ulators and mobile robots, International Journal of Ro-
botic Research, vol. 5, no.1, pp. 90-99.
Rimon E. and Koditscheck D.E. (1991), Exact robot navi-
gation using artifical potential functions, IEEE Trans-
actions on Robotics and Automation, vol. 8, pp. 501-
518.
Reif J.H. and Wang H., Social potential fields: A distrib-
uted behvioral control for autonomous robots, Robot-
ics and Autonomous Systems, Elsevier, vol. 27, 1999,
pp.171-194.
Levine H. and Rappel W.J. (2000), Self-organization in sys-
tems of self-propelled particles, Physical Review E,
vol. 63.
Duflo M. (1996), Algorithmes stochastiques,
Math
´
ematiques et Applications vol. 23, Springer,
1996.
Rigatos G.G., Tzafestas S.G. and Evangelidis G.J. (2001),
Reactive Parking Control of a non-holonomic vehicle
via a fuzzy learning automaton, IEE Proc. on Control
Theory and Applications, vol. pp. 169-180.
Gazi V. and Passino K. (2004), Stability analysis of so-
cial foraging swarms, IEEE Transactions on Systems,
Man and Cybernetics - Part B: Cybernetics, vol. 34,
no. 1, pp. 539-557.
Khalil H. (1996), Nonlinear Systems, Prentice Hall.
Clerk M. and Kennedy J. (2002), The Particle Swarm-
Explosion, Stability, and Convergence in a Multi-
dimensional Complex Space, IEEE Transactions on
Evolutionary Computation, vol. 6, no. 1, pp. 58-73,
2002.
DISTRIBUTED GRADIENT FOR MULTI-ROBOT MOTION PLANNING
65
