
AUTONOMOUS MONITORING AND REACTION TO FAILURES
IN A TOPOLOGICAL NAVIGATION SYSTEM
V. Egido, R. Barber, M. J. L. Boada, M. A. Salichs
Robotics Lab. Carlos III University.Madrid, Spain
Keywords: Robot navigation; Monitoring; Supervision; Robot skills.
Abstract: In this paper a system for simultaneous navigation and monitoring with autonomous reaction to failures is
going to be presented. This system is part of a complete navigation system called AURON (Autonomous
Robot Navigation). The AURON System autonomy is based on the interaction of four main components:
the autonomous generation of an environment representation, the planning of a sequence of actions and
perceptions which guide the robot from an initial event to a final one, the navigation that converts sequences
in real movements and supervises all the process, and the relocalization that allows to place the robot again
in the representation. This system has been implemented in a mobile robot control architecture called AD.
AD is a two level architecture: deliberative and automatic. The paper is focused in one deliberative skill, the
navigation skill.
1 INTRODUCTION
Autonomous movement implies not only being able
to perform a priori established movements without
human help, but also to react to unexpected
situations, with the same ability. Reacting to
unexpected events is a skill related to intelligence.
To supervise, will then require to monitor the
system evolution and to choose the most suitable
action over the events that halt the plan execution.
As for the monitoring techniques, there is no
generally accepted definition of execution
monitoring (Fichtner, 2003). Giacomo et al in
(Giacomo, 1998) defined it as ‘the robot’s process of
observing the world for discrepancies between the
actual world and the robot’s internal representation
of it, and recovering from such discrepancies’.
The recovering techniques that Giacomo
describes are widely dependant on the navigation
system architecture being used. The purely reactive
systems, like the one develop by Brooks (Brooks,
1986), do not have and cannot contain recovering
techniques because its basis are the reaction to
events without any kind of deliberative capacity over
themselves.
On the other hand, within the architectures which
consider those techniques because they contain a
deliberative character, the works (Stuck, 1995),
(Alami, 1998), (Fernandez, 1998) and (Fichtner,
2003) are found. All of them have a level over the
purely reactive one, which allows supervising the
navigation process, specifying which types of
situations are found, trying to correct them,
recovering the system control and, if it is possible,
accomplishing the required task.
In this work, a navigation system which monitors
what is happening and reacts to changes, is
presented. This system is called AURON and has
been implemented in the hybrid architecture AD
(Barber, 2001).
2 THE AURON NAVIGATION
SYSTEM
AURON (Autonomous Robot Navigation) is
considered a complete navigation system formed by
the interaction of four main components. As it is
shown in figure 1, the components are the explorer,
the planner, the navigator and the relocalizator.
383
Egido V., Barber R., J. L. Boada M. and A. Salichs M. (2005).
AUTONOMOUS MONITORING AND REACTION TO FAILURES IN A TOPOLOGICAL NAVIGATION SYSTEM.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 383-386
DOI: 10.5220/0001156603830386
Copyright
c
SciTePress

Figure 1: General structure of the AURON System
Each component has its own mission and
interacts with the others giving autonomy to the
robot. The explorer is in charge of generating
without human intervention the representation of the
environment navigating through unknown places
and obtaining information. The planner gives the
sequence of actions and detected events to go from
one place to another once the robot has its own
representation. The navigator converts the sequence
obtained by the planner in real movements and
supervises all the process and finally, the
relocalizator allows placing the robot again in the
representation of the environment once it is lost.
The environment representation is an essential part
of the system as it is used by all the other components.
This representation is called the Navigation Chart. The
Navigation Chart is a fundamentally topological
representation of the environment, which tries to
imitate the human navigation. It differs from other
representations (Beccari, 1997) in considering a
directed graph where arcs and nodes are equally
relevant. In this graph arcs are not unions without
information as in many other models and nodes have
parameters that allow dynamic planning mechanisms
different from previous developments.
The Navigation Chart is not formed by a
succession of places of the environment as in
(Remolina, 2004) but by a succession of elementary
skills (Egido, 2003). It is represented by a simple
directed parameterised graph G(v,e) formed by
nodes v and edges e. Nodes are events regarding
sensorial perceptions (be in front of a door) and
edges represent sensorimotor skills which lead the
robot to the next event (move towards a door). A
new situation is being described on the Navigation
Chart when detecting an event. The robot finds itself
in the specific situation or place in which a specific
sensorial event is sensed. An example of this
Navigation Chart and the importance of its edges and
nodes is shown in figure 2.
Figure 2: Example of Navigation Chart
3 SUPERVISION
Once the sensorimotor and sensorial event skills to
be detected are obtained, the skill carries out the
supervision of what is taking place while those skills
are activated or deactivated. To perform this
supervision, the information related to nodes and
edges is used. In this case, time and distance are
parameters which allow supervising the process in a
higher level, but also in some situations specific
elements associated with enabled skills and events
will be supervised.
Therefore, a two level supervision will be
considered: A general level which implies the
distance and time monitoring, which can be applied
to all skills, and a lower level that represents a
specific monitoring for specific events. This paper
will focus in the general monitoring level, which can
be applied to the skills used.
3.1 Distance monitoring
While the skills are enabled and disabled, the
process will be supervised comparing the distances
stored in the graph’s edges with the real travelled
distances. When there is a difference in percentage
between the distance travelled by the robot and the
one stored greater than a established value (for the
environment where the experiment test were carried
out, it has been empirically established that the
distance travelled will not overcome in a 10% the
one stored), the supervisor compares the actual
sensorimotor skill and the one after the node
detection having in mind two fundamental cases:
• The undetected event is not a decisive event
for the plan execution.
• The undetected event sets a change in the
execution plan and therefore it is relevant.
Exploration
Navigation
RelocalizationPlanning
Navigation Chart
Exploration
Navigation
RelocalizationPlanning
Navigation Chart
ICINCO 2005 - ROBOTICS AND AUTOMATION
384
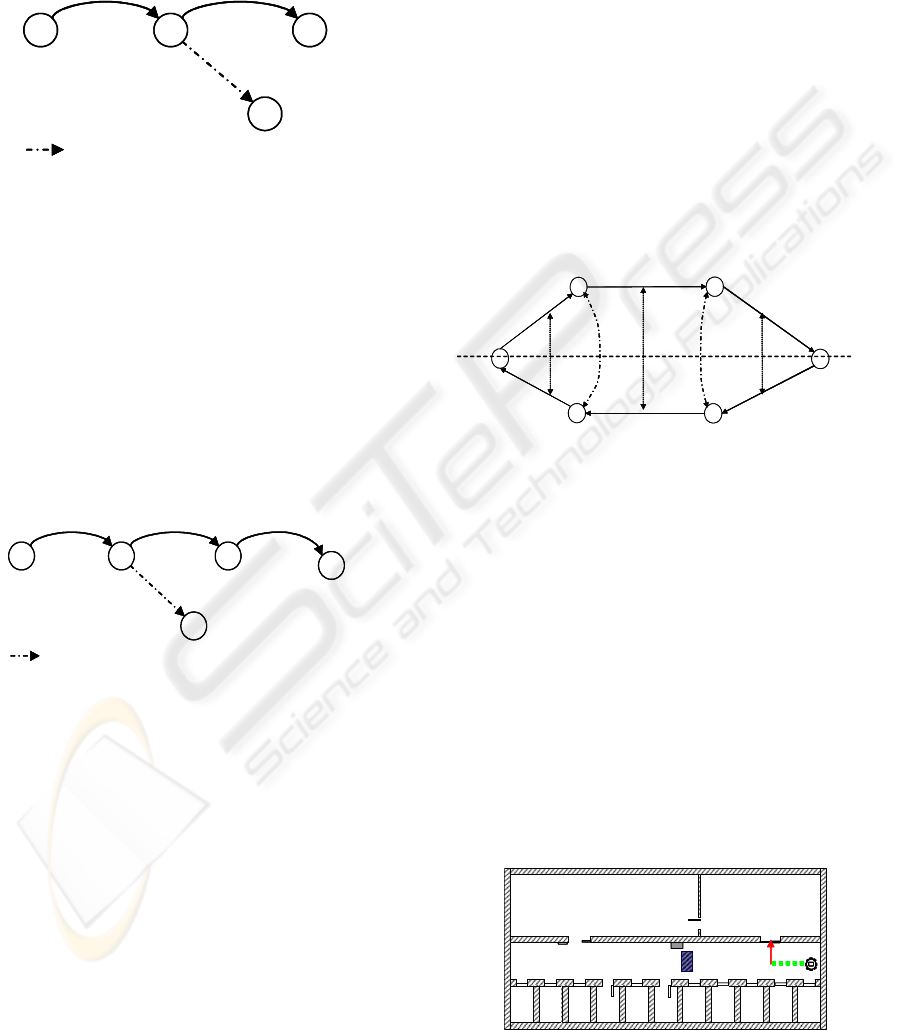
In figure 4 it is shown how the plan could
continue if the event “Right door detected” failed to
go from node A to node B, hiding the edge that
implies a different action: “Cross door”.
Corridor
travelling
Corridor
travelling
Cross door
Left door
detected
Right door
detected
Right door
detected
Right door
detected
8
Hidden edge
A
B
C
Corridor
travelling
Corridor
travelling
Cross door
Left door
detected
Right door
detected
Right door
detected
Right door
detected
8
Hidden edge
A
B
C
Figure 4: Planning with detection problems
In the second case, the sensorimotor skill that
was being carried out and the next one are different.
The event detection is totally necessary to continue
with the plan. In figure 5 it would execute the plan
that goes from node A to node C. In this case, the
navigator hides the different outgoing edges of the
failed node and communicates to the main sequencer
the new situation carrying out a new plan.
This new plan, if possible, will give a new
subgraph with the edges and nodes sequence that
allows reaching the final node in the new situation.
8
Corridor
travelling
Corridor
travelling
Cross door
Left door
detected
Right door
detected
Right door
detected
Right door
detected
8
Hidden edge
A
C
8
Corridor
travelling
Right door
detected
ROBOT
LOST !
8
Corridor
travelling
Corridor
travelling
Cross door
Left door
detected
Right door
detected
Right door
detected
Right door
detected
8
Hidden edge
A
C
8
Corridor
travelling
Right door
detected
ROBOT
LOST !
Figure 5: Planning with detection problems
To finish this supervision method monitoring
distances, a last situation is considered. The robot
could not detect the new node from the alternative
plan. (Situation of 3 consecutive failures). In this
case, it cannot be assured that the robot is in the
place set by the Navigation Chart. If the robot is in
this situation it will try a new plan, but if it fails, the
navigator will indicate by an event that the robot is
definitely lost and that there are not enough probes
to consider that the robot is in the node set by the
Navigation Chart. In figure 5 it can be seen how
three consecutive event failures imply an event in
which the navigation skill shows that the robot is
lost.
3.2 Time monitoring
In all the cases described above, failures in events
are monitored, but the environment changes could
equally affect the sensorimotor skills. If the distance
travelled is not overcame and however the time is
overcame without detecting an expected event, then
this means that a sensorimotor skill execution
problem is found and it is halted in a Navigation
Chart node.
The Navigation Chart characteristics that are
being used, in most cases, make the Navigation
Chart a graph that contains associated symmetries.
An example of this is the fact that travelling the
corridor in one way has its equivalent on travelling
the corridor in the other way. A 180º robot turn
allows travelling the corridor in the other way and
finds an event that will allow localization, as it is
shown in figure 6.
0
1 8
2
9
C
.
T
.
C.T.
C.T.
C
.
T
.
R.D.D.
R.D.D.
E.C.
L.D.D.
180º
180º
29
C
.
T
.
C
.
T
.
180º
symmetry
E.C.
L.D.D.
E.C. End of Corridor C.T. Corridor Travelling.
R.D.D. Right Door Detected L.D.D. Left Door Detected
0
1 8
2
9
C
.
T
.
C.T.
C.T.
C
.
T
.
R.D.D.
R.D.D.
E.C.
L.D.D.
180º
180º
29
C
.
T
.
C
.
T
.
180º
symmetry
E.C.
L.D.D.
E.C. End of Corridor C.T. Corridor Travelling.
R.D.D. Right Door Detected L.D.D. Left Door Detected
Figure 6: Graph symmetries to apply the time supervisory
4 EXPERIMENTAL RESULTS
The experiments described in this section have been
tested in a B21 robot by RWI. All the system has
been implemented in C++ language, using the
system specified by CORBA which provides
interoperability between objects in a heterogeneous,
distributed environment.
To test the navigation system, a mission was
requested to the robot. The robot started at the
beginning of the corridor and it should access to C12
lab, as it is shown in figure 7.
Figure 7: Experimental environment
C12
C13
C1
2
C2 C3 C4 C5 C8C7C6 C9
C10 C11
2
C12
C13
C1
2
C2 C3 C4 C5 C8C7C6 C9
C10 C11
2
AUTONOMOUS MONITORING AND REACTION TO FAILURES IN A TOPOLOGICAL NAVIGATION SYSTEM
385
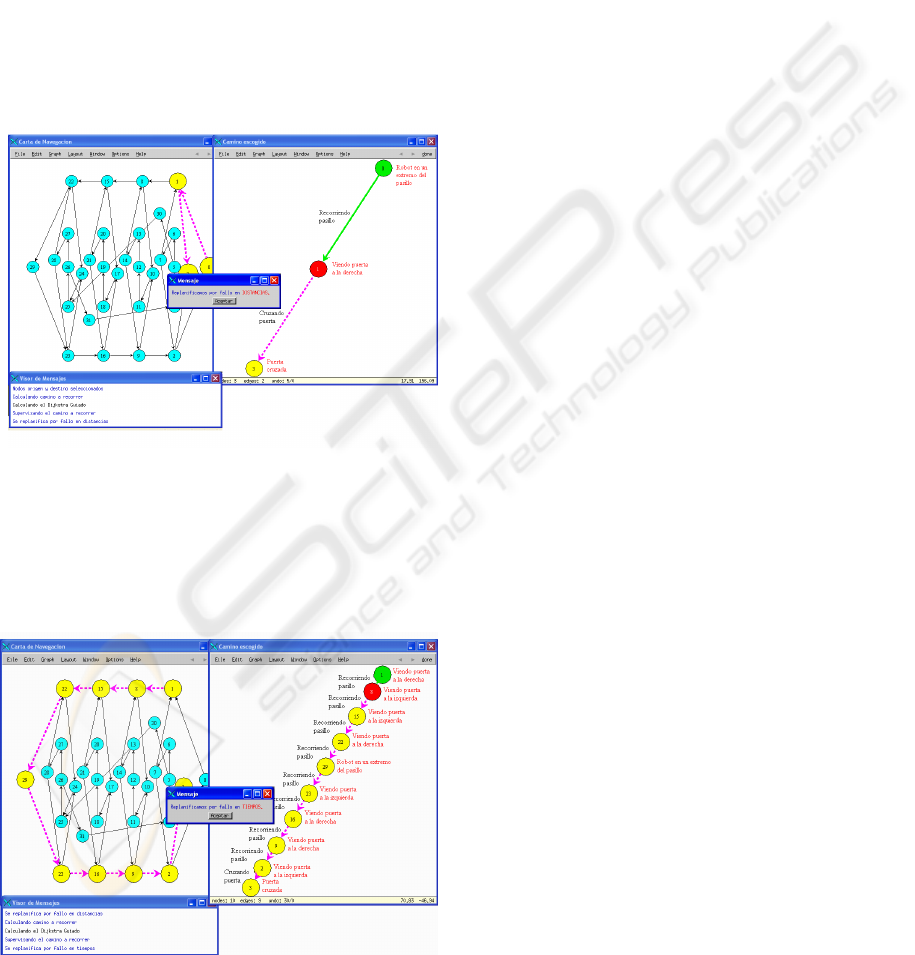
As an experiment for the monitoring and
supervision system the C12 lab door was
momentarily closed when the robot was supposed to
detect it. The second problem appeared in the
corridor, the corridor was blocked not letting the
robot continue its plan, as it is shown in figure 7.
These were the succession of steps that the
system applied without any human intervention.
While monitoring distance and time, the distance
stored in the Navigation Chart indicated that there
was a problem and the robot changed the first plan.
In figure 8, it is shown the navigation interface that
represents the Navigation Chart on the left and the
plan obtained from the planner on the right. A
failure in the node that implies detecting the door
has happened.
Figure 8: Navigation Chart when an error was detected
The navigation skill notified the problem and the
planner generated a new plan solving the problem.
The navigation skill took the new plan and began the
sequence of movements, monitoring distance and
time again. The new plan is shown in figure 9.
Figure 9: New plan generated and new failure detected
Then, because of the obstacle in the middle of
the corridor, the time stored in the Navigation Chart
indicated that there was a problem and the robot
changed the plan again. In this case, the robot turned
180º placing itself in the symmetrical edge and the
robot set a new plan. As the door of lab C12 was
opened during the explained process then it could
finally go into the lab without any problem.
ACKNOWLEDGMENT
The authors gratefully acknowledge the funds
provided by the Spanish Government through the
MCYT projects TAP1999-214 and DPI2002-00188.
REFERENCES
Alami, R.; Chatila,, R.; Fleury, S.; Ghallab, M.; Ingrand,
F. An Architecture for Autonomy International
Journal of Robotics Research, Vol. 17, Nº 4, pp 314-
337, April 1998.
Barber, R.; Salichs, M.A. A new human based architecture
for intelligent autonomous robots. The Fourth IFAC
Symposium on Intelligent Autonomous Vehicles, pp85-
90. 2001
Beccari, G.; Caselli, S.; Zanichelli, F.; Diemmi, D.
Inducing topological maps from task-oriented
perception and exploratory behaviors. Proceedings
Second EUROMICRO Workshop on Advanced Mobile
Robots. P. 134-140. IEEE Comput. Soc. USA. 1997.
Brooks, R. A robust layered control system for a mobile
robot IEEE Journal Robotics and Automation. (1986).
Egido, V.; Barber, R.; Boada, M.J.L.; Salichs, M.A. Self-
Generation by a Mobile Robot of Topological Maps of
Corridors. IEEE International Conference on Robotics
and Automation, p2662-2667.Washington, 2002.
Fernandez, J.L.; Simmons, R. Robust Execution
Monitoring for Navigation Plans. .Proceedings of
Conference on Intelligent Robotics and Systems.
Vancouver Canada, October 1998.
Fichtner, M.; Grossmann, A.; Thielscher, M. Intelligent
Execution Monitoring in Dynamic Environments.
Proc. Of IJCAI-03 Workshop on issues in Designing
Physical Agents for Dynamic Real-Time
Environments, Acapulco, Mexico, August 2003.
Giacomo, G; Reiter, R.; Soutchanski, M. Execution
monitoring of high-level robot programs. Proc. Of the
Int. Conf. On Principles of Knowledge and
Representation and Reasoning, p 453-465, 1998.
Remolina, E., Kuipers, B. Towards a General Theory of
Topological Maps. Artificial Intelligence, 152, pp 47-
104. 2004.
Stuck, E.R. Detecting and Diagnosing Mistakes. Proc. Of
the IEEE/RSJ International Conference on Intelligent
Robots and Systems, August 1995.
ICINCO 2005 - ROBOTICS AND AUTOMATION
386
