
PATTERN RECOGNITION FEATURE AND IMAGE
PROCESSING THEORY ON THE BASIS OF STOCHASTIC
GEOMETRY
1
Nikolay G. Fedotov, Lyudmila A. Shulga, Alexander V. Moiseev, Andrey S. Kol’chugin
Department of Economical Cybernetics, Penza State University, 40, Krasnaya St., Penza, 440026, Russia
Keywords: Pattern recognition, Image understanding, Stochastic geometry, Trace-transform, Triple features.
Abstract: Application of stochastic geometry methods to pattern recognition is analysed. The paper is based on Trace-
transformations of original images into images on the Möbius band. Based on the new geometric
transformation, a new approach towards the construction of features, independent of images’ motions or
their linear transformations, is put forward. A prominent characteristics of the group of features under
consideration is that we can represent each of them as a consecutive composition of three functionals. The
paper considers the application of three-functional structure of recognition feature to image pre-processing.
Feature can be invariant or sensitive to the group of all motions transformation and linear deformation of
objects depending of functionals selection. Thus sensitive features are suitable to determine the parameters
of translation. It is an important task for robotics.
1 INTRODUCTION
In the field of pattern recognition we traditionally
distinguish feature construction and decision
procedure. In literature on cybernetics a vast
majority of works on the pattern recognition have
been historically devoted to decision rules, there
actually being no works on feature construction.
There has been general agreement that it could be
explained by the fact that the process of constructing
features is empirical and dependent on the intuition
of the recognition system designer.
The approach of stochastic geometry, developed
in (Fedotov, 1990), allows us to bridge the gap and
create processes to generate great many new features
for image recognition, along with a constitutive
theory of features. Such a prominent shift of stress
from decision procedures to new recognition
features gives the approach a strong resemblance to
neuro-computing.
In (Fedotov, 1990), the author suggests using
probabilities of geometrical events understood as the
result of geometrical objects interaction
(intersections, overlapping and so on), as image
recognition features. Geometrical objects here are,
on the one hand, complex scanning trajectories with
random parameters (segments, lines, curves, figures,
etc.), and on the other hand, fragments of an image
being recognized. The structure of similar
recognition systems and examples of particular
technical implementations, are considered. Possible
extensions of the fundamental recognition process
on stochastic geometry are considered as well. One
of the extensions deals with a complication of
observing a random event (an intersection of a scan
trace and an image), i.e. with the application of more
complicated recognition features. The article
presents the basics of a new theory to construct
recognition features based on stochastic geometry
and functional analysis joint application. The key
element of this theory is new geometric Trace-
transform concerned with scanning of image by
complicated trajectories (Fedotov, 1990) (Fedotov et
al., 1995).
Trace-transform can be both the base for the new
class of recognition features – the triple ones – and
the effective tool of image preprocessing.
1
This work is supported by Human Capital Foundation
This work is supported by the Russian Foundation for Basic Research (RFBR), project N 05-01-00991
187
G. Fedotov N., A. Shulga L., V. Moiseev A. and S. Kol’chugin A. (2005).
PATTERN RECOGNITION FEATURE AND IMAGE PROCESSING THEORY ON THE BASIS OF STOCHASTIC GEOMETRY.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 187-192
DOI: 10.5220/0001160601870192
Copyright
c
SciTePress

2 TRACE-TRANSFORM
Let
F
denote a finite image. Given scanning
straight line
,
l
g
characterizing the location of
l
and the image as to each other, is to be computed
according to a certain rule
:
; map
T
is called a functional. The property required for us
here is the computational independence of an object
motion. Therefore the only requirement imposed on
is stated as follows. Let the image have been
shifted and rotated, and
T ),( Flg T=
T
F
′
be the new one. For the
same shift and rotation,
l
will become a straight line
, thus remaining, "frozen" into the image. It is
required that
l
′
),(),( FlFl
′
′
=T T
. The equality is to
hold for all straight lines and all acceptable images.
We may call the property a complete invariance of
functional
. It should be noted that the concept of
complete invariance extends pattern recognition
capabilities substantially, for it is not necessarily be
the number of intersections, intersection length, etc.
T
Functionals can be selected to describe finer
properties of neighborhood, such as neighborhood
morphology, or topological characteristics. For a
full-color image of a variable brightness a great
number of such functionals could be selected.
Hence, the range of functionals and images to be
processed widens considerably.
Just like in stochastic geometry, random value
is defined, its distribution being
independent of image shifts and rotations. Therefore,
numeric characteristics of the random value may
again serve as image features, which are to be
established with the help of special engineering
devices and systems. The limitation of the new
family of features is that they originally lack an
explicit geometrical meaning, and their
differentiating capability is a priori unknown.
However for pattern recognition, it proves not very
important, experimental testing being decisive.
),( Flg T=
To understand that the generalization proposed
in a certain aspect exhaust its own possibilities, we
are going to state the theory of Trace-transform.
Polar coordinates introduced to the plane,
is
characterized by distance
l
p
from the origin to l ,
and by angle
θ
(up to 2
π
) of its directional vector:
}sincos:),{(
pyxyxl
=
+
=
θ
θ
,
),(
pll
θ
=
, where
x
, are Cartesian coordinates on the plane. If we
allow
y
p
to take negative values, too, then
),(),(
plpl
−
+
=
π
θ
θ
.
Thus, a set of all directed straight lines
intersecting a circle of radius
with the center in
the origin (the "retina"), is unambiguously
parameterized by set
R
},0:),{( RpRp ≤
≤
−
≤
≤
=
Λ
π
θ
θ
, which
provided parameters
and
),0( p ),( p−
π
define the
same straight line. The set of straight lines on the
retina are clearly seen to be topologically nothing
but a Möbius band. Thus, the set of numbers
)),,(( Fpl
θ
T , depending on a point on Möbius band
Λ
, is a certain image transform, which we may call
a Trace-transform. If, for instance, a matrix
represents a Trace-transform in numerical analysis,
we may call it a Trace-matrix. If axis
θ
0
is directed
horizontally, and axis
vertically, matrix element,
indicated
, i.e. value
p0
),(
ji
)),,(( Fpl
ij
θ
T
, is in point
j
θ
, .
i
p
j
θ
and are here certain values of
uniform discrete grids on the axes mentioned. Along
the horizontal axis, matrix is 2
i
p
π
-periodic, its
columns rotating within each interval of length
π
.
In addition, let us consider, that if
does not
intersect the image,
is a given number (say,
l
),( FlT
a)
b)
Figure 1: Example of calculation a binary function ),,( tpf
θ
for given image a scanning line l and corresponding
Trace-Transform
ICINCO 2005 - ROBOTICS AND AUTOMATION
188
0), or another fixed element, if is nonnumeric. In
this case, a new image
corresponds to the
original image
T
)(
FT
F
,
)),,(((
Fpl
θ
T
may be treated as
an image which characteristics at
),(
p
θ
are its
Trace-image.
Figure 1,a explains the computation of a Trace -
transform. It shows how to obtain a binary
function
),,( tpf
θ
of a real variable for a scanning
line
. Function
l
),,(
•
pf
θ
equals 1 within the
interval
and
.
Within other precise it
equals 0. Let
stand for a functional applied to the
function, its independent variable being designated
by . Thus we get
),(
21
tt
),(
43
tt
T
t
),,(),( tpfpg
θ
θ
T= . We call
function
g
result of Trace–transform.
For a two–level image, such a Trace–transform
could be obtained in case
),,( •pf
θ
T
is the total of
all the intervals from the domain of the function to
be defined. For Figure 1,a it is the value of
12
tt
−
and
segments’ total. If we determine a
similar
34
tt −
),,( •pf
θ
T
for an aggregate of scanning
lines intersecting the image of a image at various
angles
θ
and various distances
p
, we can get its
Trace–image shown in Figure 1,b.
Let
),,(
tpf
θ
T
be maximum interval within
function
),,(
•
pf
θ
domain. In Figure 1,a it is the
value of
12
tt
−
(max G). This functional get us
another Trace-image.
a)
b)
Figure 2: Nonlinear filtration by means of Trace-transform
Note that the famous Radon transform (Helgason
, 1980) can be viewed as an example of a Trace–
transform. Brightness integral value summed over
all scan lines for all directions, is Radon transform.
In case
— brightness integral
value
∫
∞
∞−
=Τ dttff
pp
)(
,,
θθ
),(
θ
pf
along a scan line with parameters
),(
p
θ
, the collection
]2,0[,},{
,
π
θ
θ
∈∈Τ Rpf
p
bears all information on the image.
In the context of two-level images, Radon
transform will lie in summing up blackened
elements along each scan line. Hence, choosing an
appropriate functional, we can make Trace-
transform realize Radon transform. This is a
particular case, though. In other particular cases one
can both make Trace–transform match other well-
known geometric transforms — Fourier, Hough, etc.
— or outstep (Fedotov et al., 2000) (Fedotov et al.,
2005).
Property of Trace-transform. Trace-transform
proves convenient to study objects’ movements and
similarity transform within the retina.
Let us briefly consider how image
)(FT
a)
b)
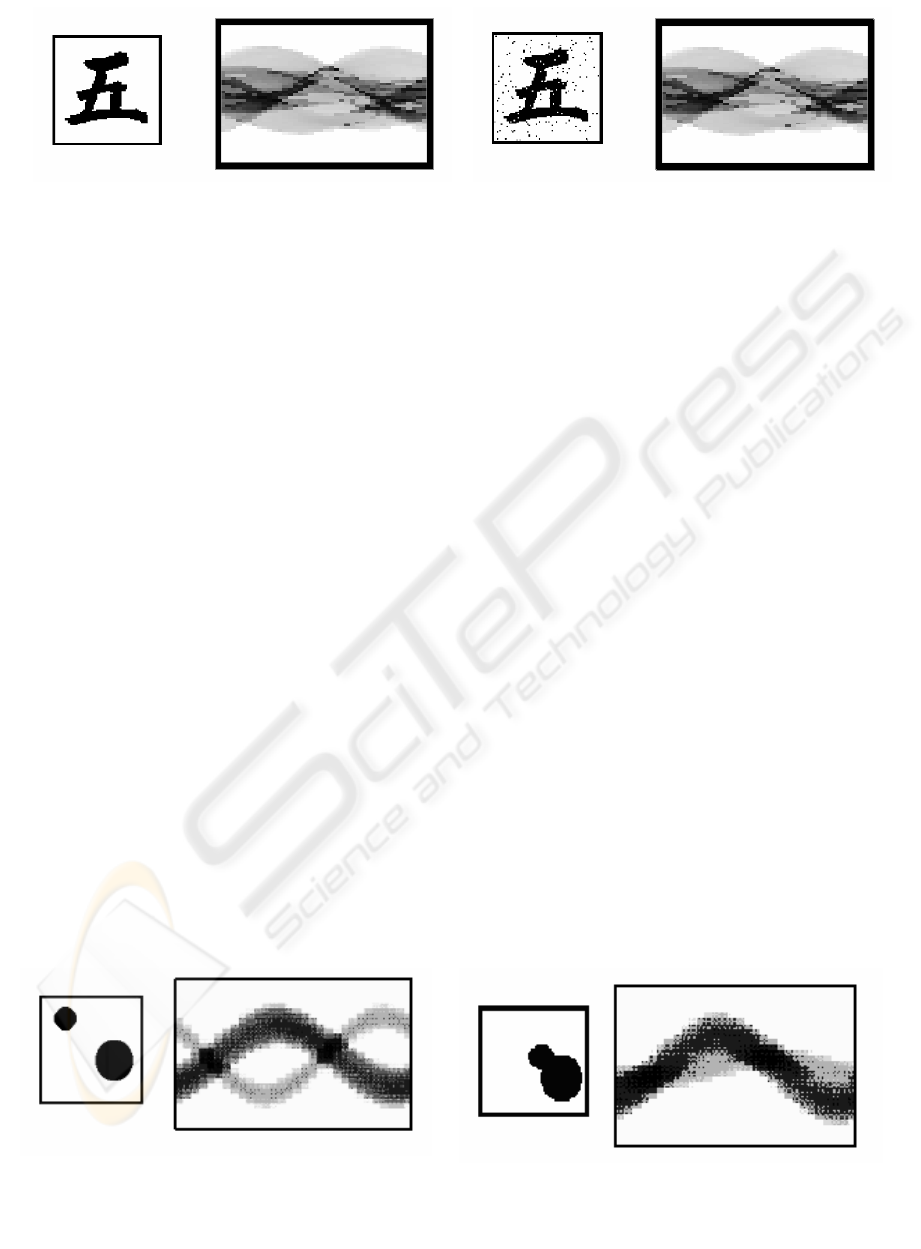
Figure 3: The experiment on a doubly-connected and single-connected images and corresponding Trace-matrices
PATTERN RECOGNITION FEATURE AND IMAGE PROCESSING THEORY ON THE BASIS OF STOCHASTIC
GEOMETRY
189

changes after initial image
F
has been shifted and
rotated. If the original image rotates, its Trace-image
shifts along the horizontal axis
θ
0
. If the original
image shifts to a certain vector, its Trace-image
undergoes changes as follows. For convenience they
are to be stated in terms of Trace-matrices. Columns
remain unchanged and stay in their places, though
may shift up or down. Shift vector specifies numbers
and
b
such that a column with coordinate a
i
θ
shifts vertically to
)cos(
ba
i
−
θ
. It should be noted
that the description is to be totally rigorous if only
we consider Trace-matrix continuous, i.e.,
i
and
are continuous parameters.
j
3 IMAGE PREPROCESSING
BASED ON TRACE-
TRANSFORM
3.1 Nonlinear filtration
Through a Trace-transform, one can implement
nonlinear filtration of image to reduce its noise and
quantization.
Figure 2,a shows the original image, while
Figure 2,b shows the same image distorted by
additive noise. If we try to obtain their Trace-
transforms using the functionals considered above
we get different Trace-matrices, the latter containing
information both about original image and the noise.
For getting information only about the original
image we propose to use more complicated
T-functionals. For example, correspondent
T-functional (1) let us to get information about
original image excepting noise information:
⎩
⎨
⎧
>
=
=
0if ,lg10
0if , 0
'
ijij
ij
ij
aa
a
a
(1)
where
are number of intersections scanning line
of given image.
ij
a
The images and its Trace-transforms obtained by
functional (1) depict in Figure 2. One can see that
pure (Figure 2,a) and noisy (Figure 2, b) images
have identical Trace-matrices.
Figure 4: The result of applying Diametrical functional to a Trace–matrix and the calculation of triple feature by
means of Circus functional
This approach was successfully applied in
diagnostics of welded joints and pores. Through the
Trace-transform, we get a matrix of an original
dimension, which elements almost unexceptionally
differ from zero if they correspond to a pore.
Other types of T-functional have been found to
replace certain types of image pre-processing, such
as inversion, and filling closures.
3.2 Evaluation of objects’ relative
position and number
Let us consider a valuable feature of Trace-
transforms to tackle certain problems of image
analysis normally solved structurally: through
segmentation, or evaluation of objects’ relative
position and number. Figure 3,b shows an object to
be viewed as having a single-connected, and its
Trace-matrix, Figures 3,a showing segmented
images and their Trace-matrices.
The example, which proves structuralistic
features of Trace-transform, applies to the field of
technical diagnostics. A problem of recognizing
welded joints’ pores was being solved based on the
results of their radiographic inspection. Figure 3
shows one of the defections typical for welded joints
— spherical pores. Instructions on radiographic
inspection request that chains of pores be
differentiated from single pores and other defections,
such as slag inclusions, incomplete penetration, etc.
Moreover, this type of defection is suggested to
be differentiated according to the relative position of
pores within the chain, as well as to the number, and
the size (the diameter) of pores.
It should be noted that one could enhance non-
linear filtration applying the filtering capabilities of
both the Trace-functional and other functional of
triple structure described below.
ICINCO 2005 - ROBOTICS AND AUTOMATION
190

4 TRIPLE FEATURES
The most valuable feature of the Trace-transform is
that it proves a source of a new class of recognition
features which have a triple structure (triple features)
(Fedotov, 1990) (Fedotov et al., 1995).
Analysis of great many formulas of stochastic
geometry, as well as well-known geometric
transformations — those of Fourier, Chough, Radon
— demonstrate that they can be represented as a
composition of three functionals. From this
conclusion, the authors construct recognition
features as a composition of three functionals. Their
recognition power matters when solving
classification problems.
Let us consider formation of triple features
which are a consecutive composition of three
functionals:
)),,(()( tpLFF
θ
ooo TPΘ=Π
. (2)
Each functional
, and effects the
function of one variable
Θ
Ρ Τ
θ
,
p
and
t
correspondingly. For each of the three functionals it
is easy to think out dozens of various concretizations
which comply with the conditions required. Hence,
we may at once get thousands of new features
invariant to motions.
Functional
, corresponding to a Trace-
transformation, has been above considered in detail.
In a discrete variant of computation the result of the
transformation, or the Trace-transform,
Τ
)),,(( tplF
θ
oΤ
is a matrix, which elements are, say,
values of brightness parameter for image
F
at the
intersections with the scanning line
),( pl
θ
.
Parameters of the scanning line
p
specify the
position of the element within the matrix.
Computation of feature to follow involves a
consecutive processing of the matrix columns with
the help of functional
, which we call diametrical.
Functional “Norm”, a standard Euclidean norm
Ρ
∫
=Ρ dpphh )(
2
has been used as functional
Ρ
,
other instances of diametrical functionals applied
may be the functional called “Max”, which is the
maximum value of the function in a Trace–matrix
column; and the “Mid” functional. It is a standard
middle point computed through
.
)(
)(
dpph
dppph
h
∫
∫
=Ρ
(3)
The result of applying
Ρ
(“Norm”) functional to
a Trace–matrix (Figure 1,b) is a 2
π
- periodic curve
shown in Figure 4.
Next stage is to perform transformations on the
curve with the help of
Θ
functional, which we call
a circus within
. The “Log” functional has been
used as a variant of
Θ
functional, being computed
through
N
∫
+=Θ .1)(ln
θθ
dhh
(4)
The triplex recognition features considered may
be computed through a highly parallel process. Like
features formed by neuron nets, the given features
have no pre-assigned meanings, their selection being
realized during a machine experiment, considering
their being useful for classification only.
5 FUNCTIONALS INVARIANT
AND SENSITIVE TO THE
AFFINE TRANSFORMATIONS
One can obtain dozens of features using three-
functional structure. But it is a fact that features
useful for practical application can be classified into
two types: invariant to affine transformation of an
image and sensitive to them.
Let us provide more strict definitions of the
invariant and sensitive functionals.
We call functional
Ξ
invariant if
))(( ubxu
Ξ
=
+
Ξ
o
for all
b
.
R∈
We call functional
sensitive if
Ζ
))(( bubxu
−
Ζ
=
+
Ζ
o for all .
Rb ∈
The following theorem is proven: if functional
Θ
Ρ
Τ
,, are invariant, then feature does not
depend upon the group of all motions.
)(FΠ
Therefore, we can rapidly and successfully find
identical images in the sequence of images
regardless of their affine transformations with the
help of invariant functionals (for example, when we
investigate the structure of micro objects, we
determine the structure elements regardless of their
location or scaling up the microscope).
We use sensitive functionals to compute the
coordinates of object motions (it can be helpful in
machine vision system for exact positioning of robot
tools). Efficiency of designed algorithms and
methods was proved by means of experiments in the
field of nanotechnology and in technical and
medicine diagnostic systems designing.
Thus, triple feature theory allows us to create
new features of two types: those are invariant to
affine transformation for given images (such as
translation, rotation and scale transforms) and their
linear deformations, and those are sensitive to affine
transformations.
PATTERN RECOGNITION FEATURE AND IMAGE PROCESSING THEORY ON THE BASIS OF STOCHASTIC
GEOMETRY
191

One can easily propose tens of different specific
realizations of each of the three functionals which
satisfy the required conditions. Hence, without much
effort, we get thousands of new features which are
invariant or sensitive to image motion. This only
proves the value of the considered theory for the
problems of pattern recognition with multiple
structure of the classes, like the problem of the
recognition of hieroglyphs or textures. In the
following, some functionals are presented which we
use to solve different problems and which are
implemented on a PC.
a) Invariant functionals:
1. Maximum value of the function.
2. The number of extrema of the function.
3. Total variation of the function.
4. Standard Euclidean norm of the function.
5. Any functional determined by the distribution
of the values of the function.
b) Sensitive functionals:
1. Standard center of gravity of the masses
calculated by formula (3).
2. The phase of the second Fourier harmonics of
the function.
3. Absolute value of the Fourier coefficient of
the third harmonics.
4. Probability-theoretic median.
6 CONCLUSION
Trace-transform has been considered, the latter
applying all-direction scanning.
The most valuable property of the Trace-
transform is that it establishes the new class of
recognition features with a triple structure (triple
features).
It is possible to form great many features (in fact,
thousands of them), as it needs to recognize patterns
with a great number of classes. A vast number of
features helps to understand image better and to
increase recognition flexibility and fidelity.
Besides, it has been established that the theory
based on triple features yields a stable result when
analyzing biological micro and nano objects, and, in
particular, when recognizing images in the field of
nanotechnology. Results have been obtained in
successful recognition of leucocytes and
erythrocytes, which саn be found in (Fedotov et al.,
2000). Moreover, the theory of triple features stated
above has been tested on and proved suitability for
technical diagnostics and flaw detection problems.
Applicability of the given ideas has been
experimentally proved in (Fedotov et al., 2002).
The theory created allows us to obtain features
independent of object motions or linear
deformations. Additionally, we can use the theory to
obtain features which depend on the transformations
mentioned above in a simple way giving us a
possibility to compute the parameters of motions and
motions or linear deformations transformed objects
(it can be helpful in machine vision system for exact
positioning of robot tools).
A composition of three functionals is applicable
at the same time to construct recognition features
and to perform non-linear filtration, to reduce noise
within the image and to segment the objects, to
smooth the image etc. It should be noted that one
could enhance non-linear filtration applying the
filtering capabilities of both the Trace-functional and
another functional of triple structure. Having the
opportunity to construct features and to perform
image pre-processing simultaneously and by the
same technique, one can make recognition system
faster, pre-processing and feature construction being
realized at the same stage of the scanning.
REFERENCES
Fedotov N.G., 1990. Metody Stokhasticheskoi Geometrii
v Raspoznavanii Obrazov (Methods of Stochastic
Geometry in Patters Recognition), Moscow, Radio i
Svjaz.
Fedotov N.G., Kadyrov A.A., 1995. Image scanning in
machine vision leads to new understanding of image.
In Proc. of 5th International Workshop on Digital In
Processing and Computer Graphics, Proc. International
Society for Optical Engineering (SPIE), Vol. 2363,
pp. 256-261.
Helgason S., 1980. The Radon Transform, Birkhauser,
Basel and Boston, Massachusetts.
Fedotov N.G., Shulga L.A., 2000. New Theory of Pattern
Recognition on the Basis of Stochastic Geometry. In
WSCG'2000 Conference Proceedings, Vol. 1, р. 373-
380.
Fedotov N.G., Shulga L.A., 2004. Feature Generation and
Stochastic Geometry. In Proc. of the 4th International
Workshop on Pattern Recognition in Information
Systems, PRIS’2004, Porto, Portugal, p. 169-175.
Fedotov N.G., Shul’ga L.A., Roy A.V., 2005. Visual
Mining for Biometrical System Based on Stochastic
Geometry Pattern Recognition and Image Analysis,
Vol. 15, No. 2, 2005, pp. 389–392.
Fedotov N.G., Nikiforova T.V., 2002. Technical
defectoscopy based on new pattern recognition theory,
Izmeritel’naya tekhnika (Measurement technics), 2002,
No. 12, pp. 27-31.
ICINCO 2005 - ROBOTICS AND AUTOMATION
192
