
FIELD GEOLOGY WITH A WEARABLE COMPUTER:
FIRST RESULTS OF THE CYBORG ASTROBIOLOGIST SYSTEM
Patrick C. McGuire
∗
, Javier G
´
omez-Elvira, Jos
´
e Antonio Rodr
´
ıguez-Manfredi, Eduardo Sebasti
´
an-Mart
´
ınez
Robotics & Planetary Exploration Laboratory, Centro de Astrobiolog
´
ıa (INTA/CSIC), Instituto Nacional T
´
ecnica Aeroespacial
Jens Orm
¨
o, Enrique D
´
ıaz-Mart
´
ınez
†
Planetary Geology Laboratory, Centro de Astrobiolog
´
ıa (INTA/CSIC), Instituto Nacional T
´
ecnica Aeroespacial
Markus Oesker, Robert Haschke, J
¨
org Ontrup, Helge Ritter
Neuroinformatics Group, Computer Science Department, Technische Fakult
¨
at, University of Bielefeld
Bielefeld, Germany
Keywords:
computer vision, image segmentation, interest map, field geology on Mars, wearable computers.
Abstract:
We present results from the first geological field tests of the ‘Cyborg Astrobiologist’, which is a wearable
computer and video camcorder system that we are using to test and train a computer-vision system towards
having some of the autonomous decision-making capabilities of a field-geologist. The Cyborg Astrobiologist
platform has thus far been used for testing and development of these algorithms and systems: robotic acqui-
sition of quasi-mosaics of images, real-time image segmentation, and real-time determination of interesting
points in the image mosaics. This work is more of a test of the whole system, rather than of any one part of the
system. However, beyond the concept of the system itself, the uncommon map (despite its simplicity) is the
main innovative part of the system. The uncommon map helps to determine interest-points in a context-free
manner. Overall, the hardware and software systems function reliably, and the computer-vision algorithms are
adequate for the first field tests. In addition to the proof-of-concept aspect of these field tests, the main result
of these field tests is the enumeration of those issues that we can improve in the future, including: dealing with
structural shadow and microtexture, and also, controlling the camera’s zoom lens in an intelligent manner.
Nonetheless, despite these and other technical inadequacies, this Cyborg Astrobiologist system, consisting
of a camera-equipped wearable-computer and its computer-vision algorithms, has demonstrated its ability of
finding genuinely interesting points in real-time in the geological scenery, and then gathering more informa-
tion about these interest points in an automated manner. We use these capabilities for autonomous guidance
towards geological points-of-interest.
1 INTRODUCTION
Outside of the Mars robotics community, it is com-
monly presumed that the robotic rovers on Mars are
controlled in a time-delayed joystick manner, wherein
commands are sent to the rovers several if not many
times per day, as new information is acquired from
the rovers’ sensors. However, inside the Mars robot-
ics community, they have learned that such a brute
∗
New address (after October 3, 2005): McDonnell Cen-
ter for the Space Sciences; Department of Earth & Planetary
Sciences, and the Department of Physics; Washington Uni-
versity; Campus Box 1169; 1 Brookings Dr.; Saint Louis,
MO 63130-4862, USA
†
Currently at: Direcci
´
on de Geolog
´
ıa y Geof
´
ısica; Insti-
tuto Geol
´
ogico y Minero de Espa
˜
na; Calera 1; Tres Cantos,
Madrid, Spain 28760
force joystick-control process is rather cumbersome,
and they have developed much more elegant methods
for robotic control of the rovers on Mars, with highly
significant degrees of robotic autonomy.
Particularly, the Mars Exploration Rover (MER)
team has demonstrated autonomy for the two robotic
rovers Spirit & Opportunity to the level that: practi-
cally all commands for a given Martian day (1 ‘sol’
= 24.6 hours) are delivered to each rover from Earth
before the robot wakens from its power-conserving
nighttime resting mode (Crisp et al., 2003; Squyres
et al., 2004). Each rover then follows the commanded
sequence of moves for the entire sol, moving to de-
sired locations, articulating its arm with its sensors to
desired points in the workspace of the robot, and ac-
quiring data from the cameras and chemical sensors.
From an outsider’s point of view, these capabilities
283
C. McGuire P., Gómez-Elvira J., Antonio Rodríguez-Manfredi J., Sebastián-Mar tínez E., Ormö J., Díaz-Martínez E., Oesker M., Haschke R., Ontrup J.
and Ritter H. (2005).
FIELD GEOLOGY WITH A WEARABLE COMPUTER: FIRST RESULTS OF THE CYBORG ASTROBIOLOGIST SYSTEM.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 283-291
DOI: 10.5220/0001161002830291
Copyright
c
SciTePress

may not seem to be significantly autonomous, in that
all the commands are being sent from Earth, and the
MER rovers are merely executing those commands.
But the following facts/feats deserve emphasis before
judgement is made of the quality of the MER auton-
omy: this robot is on another planet with a complex
surface to navigate and study; and all of the complex
command sequence is sent to the robot the previous
night for autonomous operation the next day. Sophis-
ticated software and control systems are also part of
the system, including the MER autonomous obstacle
avoidance system and the MER visual odometry & lo-
calization software.
3
One should remember that there
is a large team of human roboticists and geologists
working here on the Earth in support of the MER mis-
sions, to determine science targets and robotic com-
mand sequences on a daily basis; after the sun sets for
an MER rover, the rover mission team can determine
the science priorities and the command sequence for
the next sol in less than 4-5 hours.
4
One future mission deserves special discussion for
the technology developments described in this paper:
the Mars Science Laboratory, planned for launch in
2009 (MSL’2009). A particular capability desired
for this MSL’2009 mission will be to rapidly traverse
to up to three geologically-different scientific points-
of-interest within the landing ellipse. These three
geologically-different sites will be chosen from Earth
by analysis of relevant satellite imagery. Possible de-
sired maximal traversal rates could range from 300-
2000 meters/sol in order to reach each of the three
points-of-interest in the landing ellipse in minimum
time.
Given these substantial expected traversal rates of
the MSL’2009 rover, autonomous obstacle avoidance
(Goldberg et al., 2002) and autonomous visual odom-
etry & localization (Olson et al., 2003) will be es-
sential to achieve these rates, since otherwise, rover
damage and slow science-target approach would be
the results. Given such autonomy in the rapid tra-
verses, it behooves us to enable the autonomous
rover with sufficient scientific responsibility. Other-
wise, the robotic rover exploration system might drive
right past an important scientific target-of-opportunity
along the way to the human-chosen scientific point-
of-interest. Crawford & Tamppari (Crawford and
Tamppari, 2002) and their NASA/Ames team summa-
rize possible ‘autonomous traverse science’, in which
every 20-30 meters during a 300 meter traverse (in
their example), science pancam and Mini-TES (Ther-
mal Emission Spectrometer) image mosaics are au-
3
This visual odometry and localization software was
added to the systems after the rovers had been on Mars for
several months (Squyres, 2004).
4
Right after landing, this command sequencing took
about 17 hours (Squyres, 2004).
tonomously obtained. They state that “there may be
onboard analysis of the science data from the pancam
and the mini-TES, which compares this data to prede-
fined signatures of carbonates or other targets of inter-
est. If detected, traverse may be halted and informa-
tion relayed back to Earth.” This onboard analysis of
the science data is precisely the technology issue that
we have been working towards solving. This paper
is the first report to the general robotics community
describing our progress towards giving a robotic as-
trobiologist some aspects of autonomous recognition
of scientific targets-of-opportunity. This technology
development may not be sufficiently mature nor suf-
ficiently necessary for deployment on the MSL’2009
mission, but it should find utility in missions beyond
MSL’2009.
Before proceeding, we first note here two of the re-
lated efforts in the development of autonomous recog-
nition of scientific targets-of-opportunity for astrobi-
ological exploration: firstly, the work on developing a
Nomad robot to search for meteorites in Antartica led
by the Carnegie Mellon University Robotics Institute
(Apostolopoulos et al., 2000; Pedersen, 2001), and
secondly, the work by a group at NASA/Ames on de-
veloping a Geological Field Assistant (GFA) (Gulick
et al., 2001; Gulick et al., 2002; Gulick et al., 2004).
From an algorithmic point-of-view, the uncommon-
mapping technique presented in this paper attempts
to identify interest points in a context-free, unbiased
manner. In related work, (Heidemann, 2004) has
studied the use of spatial symmetry of color pixel val-
ues to identify focus points in a context-free, unbiased
manner.
Figure 1: D
´
ıaz Mart
´
ınez & McGuire with the Cyborg As-
trobiologist System on 3 March 2004, 10 meters from the
outcrop cliff that is being studied during the first geologi-
cal field mission to near Rivas Vaciamadrid . We are taking
notes prior to acquiring one of our last-of-the-day mosaics
and its set of interest-point image chips. This is the tripod
position #2 shown in Fig. 6, nearest the cliffs.
ICINCO 2005 - ROBOTICS AND AUTOMATION
284

2 THE CYBORG GEOLOGIST &
ASTROBIOLOGIST SYSTEM
Our ongoing effort in this area of autonomous recog-
nition of scientific targets-of-opportunity for field ge-
ology and field astrobiology is beginning to mature as
well. To date, we have developed and field-tested a
GFA-like “Cyborg Astrobiologist” system (McGuire
et al., 2004a; McGuire et al., 2004b; McGuire et al.,
2005a; McGuire et al., 2005b) that now can:
• Use human mobility to maneuver to and within a ge-
ological site and to follow suggestions from the com-
puter as to how to approach a geological outcrop;
• Use a portable robotic camera system to obtain a
mosaic of color images;
• Use a ‘wearable’ computer to search in real-time for
the most uncommon regions of these mosaic images;
• Use the robotic camera system to re-point at several
of the most uncommon areas of the mosaic images, in
order to obtain much more detailed information about
these ‘interesting’ uncommon areas;
• Use human intelligence to choose between the wear-
able computer’s different options for interesting areas
in the panorama for closer approach; and
• Repeat the process as often as desired, sometimes
retracing a step of geological approach.
In the Mars Exploration Workshop in Madrid in
November 2003, we demonstrated some of the early
capabilities of our ‘Cyborg’ Geologist/Astrobiologist
System (McGuire et al., 2004b). We have been us-
ing this Cyborg system as a platform to develop
computer-vision algorithms for recognizing interest-
ing geological and astrobiological features, and for
testing these algorithms in the field here on the Earth.
The half-human/half-machine ‘Cyborg’ approach
(Fig. 1) uses human locomotion and human-geologist
intuition/intelligence for taking the computer vision-
algorithms to the field for teaching and testing, using
a wearable computer. This is advantageous because
we can therefore concentrate on developing the ‘sci-
entific’ aspects for autonomous discovery of features
in computer imagery, as opposed to the more ‘engi-
neering’ aspects of using computer vision to guide
the locomotion of a robot through treacherous terrain.
This means the development of the scientific vision
system for the robot is effectively decoupled from the
development of the locomotion system for the robot.
After the maturation and optimization of the
computer-vision algorithms, we hope to transplant
these algorithms from the Cyborg computer to the on-
board computer of a semi-autonomous robot that will
be bound for Mars or one of the interesting moons
in our solar system. Field tests of such a robot have
already begun with the Cyborg Astrobiologist’s soft-
ware for scientific autonomy. Our software has been
delivered to the robotic borehole inspection system of
the MARTE project
5
.
Figure 2: An image segmentation made by human geolo-
gist D
´
ıaz Mart
´
ınez of the outcrop during the first mission to
Rivas Vaciamadrid. Region 1 has a tan color and a blocky
texture; Region 2 is subdivided by a vertical fault and has
more red color and a more layered texture than Region 1;
Region 3 is dominated by white and tan layering; and Re-
gion 4 is covered by vegetation. The dark & wet spots in
Region 3 were only observed during the second mission, 3
months later. The Cyborg Geologist/Astrobiologist made
its own image segmentations for portions of the cliff face
that included the area of the white layering at the bottom of
the cliff (Fig. 7).
Both of the field geologists on our team, D
´
ıaz
Mart
´
ınez and Orm
¨
o, have independently stressed the
importance to field geologists of geological ‘contacts’
and the differences between the geological units that
are separated by the geological contact. For this rea-
son, in March 2003, we decided that the most impor-
tant tool to develop for the beginning of our computer
vision algorithm development was that of ‘image seg-
mentation’. Such image segmentation algorithms
would allow the computer to break down a panoramic
image into different regions (Fig. 2 for an example),
based upon similarity, and to find the boundaries or
contacts between the different regions in the image,
based upon difference. Much of the remainder of this
paper discusses the first geological field trials with
the wearable computer of the segmentation algorithm
and the associated uncommon map algorithm that we
have implemented and developed. In the near future,
we hope to use the Cyborg Astrobiologist system to
test more advanced image-segmentation algorithms,
capable of simultaneous color and texture image seg-
mentation (Freixenet et al., 2004), as well as novelty-
detection algorithms (Bogacz et al., 1999)
5
MARTE is a practice mission in the summer of 2005
for tele-operated robotic drilling and tele-operated scientific
studies in a Mars-like environment near the Rio Tinto, in
Andalucia in southern Spain.
FIELD GEOLOGY WITH A WEARABLE COMPUTER: FIRST RESULTS OF THE CYBORG ASTROBIOLOGIST
SYSTEM
285

2.1 Image Segmentation,
Uncommon Maps, Interest
Maps, and Interest Points
With human vision, a geologist:
• Firstly, tends to pay attention to those areas of a
scene which are most unlike the other areas of the
scene; and then,
• Secondly, attempts to find the relation between the
different areas of the scene, in order to understand the
geological history of the outcrop.
The first step in this prototypical thought process
of a geologist was our motivation for inventing the
concept of uncommon maps. See Fig. 3 for a sim-
ple illustration of the concept of an uncommon map.
We have not yet attempted to solve the second step in
this prototypical thought process of a geologist, but
it is evident from the formulation of the second step,
that human geologists do not immediately ignore the
common areas of the scene. Instead, human geolo-
gists catalog the common areas and put them in the
back of their minds for “higher-level analysis of the
scene”, or in other words, for determining explana-
tions for the relations of the uncommon areas of the
scene with the common areas of the scene.
Figure 3: For the simple, idealized image on the left, we
show the corresponding uncommon map on the right. The
whiter areas in the uncommon map are more uncommon
than the darker areas in this map.
Prior to implementing the ‘uncommon map’, the
first step of the prototypical geologist’s thought
process, we needed a segmentation algorithm, in or-
der to produce pixel-class maps to serve as input to
the uncommon map algorithm. We have implemented
the classic co-occurrence histogram algorithm (Haral-
ick et al., 1973; Haddon and Boyce, 1990). For this
work, we have not included texture information in ei-
ther the segmentation algorithm or in the uncommon
map algorithm. Currently, each of the three bands of
HSI color information is segmented separately, and
later merged in the interest map by summing three
independent uncommon maps. In future work, ad-
vanced image-segmentation algorithms that simulta-
neously use color & texture could be developed for
and tested on the Cyborg Astrobiologist System (i.e.,
the algorithms of Freixenet et al., 2004).
The concept of an ‘uncommon map’ is our inven-
tion, though it probably has been independently in-
vented by other authors, since it is somewhat use-
ful. In our implementation, the uncommon map algo-
rithm takes the top 8 pixel classes determined by the
image segmentation algorithm, and ranks each pixel
class according to how many pixels there are in each
class. The pixels in the pixel class with the greatest
number of pixel members are numerically labelled as
‘common’, and the pixels in the pixel class with the
least number of pixel members are numerically la-
belled as ’uncommon’. The ‘uncommonness’ hence
ranges from 1 for a common pixel to 8 for an uncom-
mon pixel, and we can therefore construct an uncom-
mon map given any image segmentation map. In our
work, we construct several uncommon maps from the
color image mosaic, and then we sum these uncom-
mon maps together, in order to arrive at a final interest
map.
In this paper, we develop and test a simple, high-
level concept of interest points of an image, which is
based upon finding the centroids of the smallest (most
uncommon) regions of the image. Such a ‘global’
high-level concept of interest points differs from the
lower-level ‘local’ concept of F
¨
orstner interest points
based upon corners and centers of circular features.
However, this latter technique with local interest
points is used by the MER team for their stereo-vision
image matching and for their visual-odometry and
visual-localization image matching (Goldberg et al.,
2002; Olson et al., 2003; Nesnas et al., 1999). Our
interest point method bears somewhat more relation
to the higher-level wavelet-based salient points tech-
nique (Sebe et al., 2003), in that they search first
at coarse resolution for the image regions with the
largest gradient, and then they use wavelets in order
to zoom in towards the salient point within that region
that has the highest gradient. Their salient point tech-
nique is edge-based, whereas our interest point is cur-
rently region-based. Since in the long-term, we have
an interest in geological contacts, this edge-based &
wavelet-based salient point technique could be a rea-
sonable future interest-point algorithm to incorporate
into our Cyborg Astrobiologist system for testing.
2.2 Hardware & Software for the
Cyborg Astrobiologist
The non-human hardware of the Cyborg Astrobiolo-
gist system consists of:
• a 667 MHz wearable computer (from ViA Com-
puter Systems) with a ‘power-saving’ Transmeta
‘Crusoe’ CPU and 112 MB of physical memory,
• an SV-6 Head Mounted VGA Display (from Tekgear
, via the Spanish supplier Decom) that works well in
bright sunlight,
• a SONY ‘Handycam’ color video camera (model
ICINCO 2005 - ROBOTICS AND AUTOMATION
286

DCR-TRV620E-PAL), with a Firewire/IEEE1394 ca-
ble to the computer,
• a thumb-operated USB finger trackball from 3G
Green Green Globe Co., resupplied by ViA Computer
Systems, and by Decom,
• a small keyboard attached to the human’s arm,
• a tripod for the camera, and
• a Pan-Tilt Unit (model PTU-46-70W) from Directed
Perception with a bag of associated power and signal
converters.
The wearable computer processes the images ac-
quired by the color digital video camera, to compute
a map of interesting areas. The computations include:
simple mosaicking by image-butting, as well as two-
dimensional histogramming for image segmentation
(Haralick et al., 1973; Haddon and Boyce, 1990).
This image segmentation is independently computed
for each of the Hue, Saturation, and Intensity (H,S,I)
image planes, resulting in three different image-
segmentation maps. These image-segmentation maps
were used to compute ‘uncommon’ maps (one for
each of the three (H,S,I) image-segmentation maps):
each of the three resulting uncommon maps gives
highest weight to those regions of smallest area for
the respective (H,S,I) image planes. Finally, the three
(H,S,I) uncommon maps are added together into an
interest map, which is used by the Cyborg system for
subsequent interest-guided pointing of the camera.
After segmenting the mosaic image (Fig. 7), it be-
comes obvious that a very simple method to find in-
teresting regions in an image is to look for those re-
gions in the image that have a significant number of
uncommon pixels. We accomplish this by (Fig. 5):
first, creating an uncommon map based upon a linear
reversal of the segment area ranking; second, adding
the 3 uncommon maps (for H, S, & I ) together to
form an interest map; and third, blurring this interest
map
6
.
Based upon the three largest peaks in the
blurred/smoothed interest map, the Cyborg system
then guides the Pan-Tilt Unit to point the camera
at each of these three positions to acquire high-
resolution color images of the three interest points
(Fig. 4). By extending a simple image-acquisition
and image-processing system to include robotic and
mosaicking elements, we were able to conclusively
demonstrate that the system can make reasonable de-
cisions by itself in the field for robotic pointing of the
camera.
6
with a gaussian smoothing kernel of width B = 10
pixels.
3 DESCRIPTIVE SUMMARIES
OF THE FIELD SITE AND OF
THE EXPEDITIONS
On March 3rd and June 11th, 2004, three of the
authors, McGuire, D
´
ıaz Mart
´
ınez & Orm
¨
o, tested
the “Cyborg Astrobiologist” system for the first time
at a geological site, the gypsum-bearing southward-
facing stratified cliffs near the “El Campillo” lake of
Madrid’s Southeast Regional Park, outside the suburb
of Rivas Vaciamadrid. Due to the significant storms in
the 3 months between the two missions, there were 2
dark & wet areas in the gypsum cliffs that were visible
only during the second mission. In Fig. 2, we show
the segmentation of the outcrop (during the first mis-
sion), according to the human geologist, D
´
ıaz Mar-
tinez, for reference.
The computer was worn on McGuire’s belt, and
typically took 3-5 minutes to acquire and compose a
mosaic image composed of M × N subimages. Typ-
ical values of M × N used were 3 × 9 and 11 × 4.
The sub-images were downsampled in both directions
by a factor of 4-8 during these tests; the original sub-
image dimensions were 360 × 288.
Several mosaics were acquired of the cliff face
from a distance of about 300 meters, and the com-
puter automatically determined the three most inter-
esting points in each mosaic. Then, the wearable
computer automatically repointed the camera towards
each of the three interest points, in order to acquire
non-downsampled color images of the region around
each interest point in the image. All the original
mosaics, all the derived mosaics and all the interest-
point subimages were then saved to hard disk for post-
mission study.
Two other tripod positions were chosen for acquir-
ing mosaics and interest-point image-chip sets. At
each of the three tripod positions, 2-3 mosaic images
and interest-point image-chip sets were acquired. One
of the chosen tripod locations was about 60 meters
from the cliff’s face; the other was about 10 meters
(Fig. 1) from the cliff face.
During the 2nd mission at distances of 300 meters
and 60 meters, the system most often determined the
wet spots (Fig. 4) to be the most interesting regions on
the cliff face. This was encouraging to us, because we
also found these wet spots to be the most interesting
regions.
7
7
These dark & wet regions were interesting to us partly
because they give information about the development of
the outcrop. Even if the relatively small spots were only
dark, and not wet (i.e., dark dolerite blocks, or a brecciated
basalt), their uniqueness in the otherwise white & tan out-
crop would have drawn our immediate attention. Addition-
ally, even if this had been our first trip to the site, and if the
dark spots had been present during this first trip, these dark
FIELD GEOLOGY WITH A WEARABLE COMPUTER: FIRST RESULTS OF THE CYBORG ASTROBIOLOGIST
SYSTEM
287

After the tripod position at 60 meters distance, we
chose the next tripod position to be about 10 meters
from the cliff face (Fig. 1). During this ‘close-up’
study of the cliff face, we intended to focus the Cy-
borg Astrobiologist exploration system upon the two
points that it found most interesting when it was in the
more distant tree grove, namely the two wet and dark
regions of the lower part of the cliff face. By moving
from 60 meters distance to 10 meters distance and by
focusing at the closer distance on the interest points
determined at the larger distance, we wished to sim-
ulate how a truly autonomous robotic system would
approach the cliff face (see the map in Fig. 6). Un-
fortunately, due to a combination of a lack of human
foresight in the choice of tripod position and a lack
of more advanced software algorithms to mask out
the surrounding & less interesting region (see discus-
sion in Section 4), for one of the two dark spots, the
Cyborg system only found interesting points on the
undarkened periphery of the dark & wet stains. Fur-
thermore, for the other dark spot, the dark spot was
spatially complex, being subdivided into several re-
gions, with some green and brown foliage covering
part of the mosaic. Therefore, in both close-up cases
the value of the interest mapping is debatable. This
interest mapping could be improved in the future, as
we discuss in Section 4.2.
4 RESULTS
4.1 Results from the First Geological
Field Test
As first observed during the first mission to Rivas on
March 3rd, the characteristics of the southward-facing
cliffs at at Rivas Vaciamadrid consist of mostly tan-
colored surfaces, with some white veins or layers, and
with significant shadow-causing three-dimensional
structure. The computer vision algorithms performed
adequately for a first visit to a geological site, but they
need to be improved in the future. As decided at the
end of the first mission by the mission team, the im-
provements include: shadow-detection and shadow-
interpretation algorithms, and segmentation of the im-
ages based upon microtexture.
In the last case, we decided that due to the very
monochromatic & slightly-shadowy nature of the
imagery, the Cortical Interest Map algorithm non-
regions would have captured our attention for the same rea-
sons. The fact that these dark spots had appeared after our
first trip and before the second trip was not of paramount
importance to grab our interest (but the ‘sudden’ appear-
ance of the dark spots between the two missions did arouse
our higher-order curiosity).
intuitively decided to concentrate its interest on dif-
ferences in intensity, and it tended to ignore hue and
saturation.
After the first geological field test, we spent sev-
eral months studying the imagery obtained during this
mission, and fixing various further problems that were
only discovered after the first mission. Though we
had hoped that the first mission to Rivas would have
been more like a science mission, in reality it was
more of an engineering mission.
4.2 Results from the Second
Geological Field Test
In Fig. 4, from the tree grove at a distance of 60 me-
ters, the Cyborg Astrobiologist system found the dark
& wet spot on the right side to be the most interest-
ing, the dark & wet spot on the left side to be the
second most interesting, and the small dark shadow
in the upper left hand corner to be the 3rd most in-
teresting. For the first two interest points (the dark &
wet spots), it is apparent from the uncommon map for
intensity pixels in Fig. 5 that these points are interest-
ing due to their relatively remarkable intensity values.
By inspection of Fig. 7, we see that these pixels which
reside in the white segment of the intensity segmenta-
tion mosaic are unusual because they are a cluster of
very dim pixels (relative to the brighter red, blue and
green segments). Within the dark wet spots, we ob-
serve that these particular points in the white segment
of the intensity segmentation in Fig. 7 are interesting
because they reside in the shadowy areas of the dark
& wet spots. We interpret the interest in the 3rd in-
terest point to be due to the juxtaposition of the small
green plant with the shadowing in this region; the in-
terest in this point is significantly smaller than for the
2 other interest points.
More advanced software could be developed to
handle better the close-up real-time interest-map
analysis of the imagery acquired at the close-up tripod
position (10 meter distance from the cliff; not shown
here). Here are some options to be included in such
software development:
• Add hardware & software to the Cyborg Astrobiolo-
gist so that it can make intelligent use of its zoom lens.
We plan to use the camera’s LANC communication
interface to control the zoom lens with the wearable
computer. With such software for intelligent zoom-
ing, the system could have corrected the human’s mis-
take in tripod placement and decided to zoom further
in, to focus only on the shadowy part of the dark &
wet spot (which was determined to be the most inter-
esting point at a distance of 60 meters), rather than the
periphery of the entire dark & wet spot.
• Enhance the Cyborg Astrobiologist system so that it
has a memory of the image segmentations performed
ICINCO 2005 - ROBOTICS AND AUTOMATION
288

at a greater distance or at a lower magnification of
the zoom lens. Then, when moving to a closer tripod
position or a higher level of zoom-magnification, reg-
ister the new imagery or the new segmentation maps
with the coarser resolution imagery and segmentation
maps. Finally, tell the system to mask out or ignore or
deemphasize those parts of the higher resolution im-
agery which were part of the low-interest segments of
the coarser, more distant segmentation maps, so that it
concentrates on those features that it determined to be
interesting at coarse resolution and higher distance.
Figure 4: Mosaic image of a three-by-four set of grayscale
sub-images acquired by the Cyborg Astrobiologist at the be-
ginning of its second expedition. The three most interesting
points were subsequently revisited by the camera in order to
acquire full-color higher-resolution images of these points-
of-interest. The colored points and rectangles represent the
points that the Cyborg Astrobiologist determined (on loca-
tion) to be most interesting; green is most interesting, blue
is second most interesting, and red is third most interesting.
The images were taken and processed in real-time between
1:25PM and 1:35PM local time on 11 June 2004 about 60
meters from some gypsum-bearing southward-facing cliffs
near the “El Campillo” lake of the Madrid southeast re-
gional park outside of Rivas Vaciamadrid . See Figs. 5 & 7
for some details about the real-time image processing that
was done in order to determine the location of the interest
points in this figure.
5 DISCUSSION & CONCLUSIONS
Both the human geologists on our team concur with
the judgement of the Cyborg Astrobiologist software
system, that the two dark & wet spots on the cliff wall
were the most interesting spots during the second mis-
sion. However, the two geologists also state that this
largely depends on the aims of study for the geolog-
ical field trip; if the aim of the study is to search for
hydrological features, then these two dark & wet spots
are certainly interesting. One question which we have
thus far left unstudied is “What would the Cyborg As-
trobiologist system have found interesting during the
second mission if the two dark & wet spots had not
been present during the second mission?” It is possi-
ble that it would again have found some dark shadow
particularly interesting, but with the improvements
made to the system between the first and second mis-
sion, it is also possible that it could have found a dif-
ferent feature of the cliff wall more interesting.
5.1 Outlook
The NEO programming for this Cyborg Geologist
project was initiated with the SONY Handycam in
April 2002. The wearable computer arrived in June
2003, and the head mounted display arrived in No-
vember 2003. We now have a reliably functioning
human and hardware and software Cyborg Geologist
system, which is partly robotic with its Pan-Tilt cam-
era mount. This robotic extension allows the camera
to be pointed repeatedly, precisely & automatically in
different directions.
Based upon the significantly-improved perfor-
mance of the Cyborg Astrobiologist system during the
2nd mission to Rivas in June 2004, we conclude that
the system now is debugged sufficiently so as to be
able to produce studies of the utility of particular com-
puter vision algorithms for geological deployment in
the field.
8
We have outlined some possibilities for im-
provement of the system based upon the second field
trip, particularly in the improvement in the systems-
level algorithms needed in order to more intelligently
drive the approach of the Cyborg or robotic system
towards a complex geological outcrop. These possi-
ble systems-level improvements include: hardware &
software for intelligent use of the camera’s zoom lens
and a memory of the image segmentation performed
at greater distance or lower magnification of the zoom
lens.
ACKNOWLEDGEMENTS
P. McGuire, J. Orm
¨
o and E. D
´
ıaz Mart
´
ınez would
all like to thank the Ramon y Cajal Fellowship pro-
gram of the Spanish Ministry of Education and Sci-
8
NOTE IN PROOFS: After this paper was originally
written, we did some tests at a second field site (in Guadala-
jara, Spain) with the same algorithm and the same parame-
ter settings. Despite the change in character of the geolog-
ical imagery from the first field site (in Rivas Vaciamadrid,
discussed below) to the second field site, the uncommon-
mapping technique again performed rather well, giving an
agreement with post-mission human-geologist assessment
68% of the time (with a 32% false positive rate and a 32%
false negative rate), see (McGuire et al., 2005b) for more
detail. This success rate is qualitiatively comparable to the
results from the first mission in Rivas. This is evidence that
the system performs in a context-free, unbiased manner.
FIELD GEOLOGY WITH A WEARABLE COMPUTER: FIRST RESULTS OF THE CYBORG ASTROBIOLOGIST
SYSTEM
289

ence. Many colleagues have made this project possi-
ble through their technical assistance, administrative
assistance, or scientific conversations. We give spe-
cial thanks to Kai Neuffer, Antonino Giaquinta, Fer-
nando Camps Mart
´
ınez, and Alain Lepinette Malvitte
for their technical support. We are indebted to Glo-
ria Gallego, Carmen Gonz
´
alez, Ramon Fern
´
andez,
Coronel Angel Santamaria, and Juan P
´
erez Mercader
for their administrative support. We acknowledge
conversations with Virginia Souza-Egipsy, Mar
´
ıa Paz
Zorzano Mier, Carmen C
´
ordoba Jabonero, Josefina
Torres Redondo, V
´
ıctor R. Ruiz, Irene Schneider,
Carol Stoker, Paula Grunthaner, Maxwell D. Walter,
Fernando Ayll
´
on Quevedo, Javier Mart
´
ın Soler, J
¨
org
Walter, Claudia Noelker, Gunther Heidemann, Robert
Rae, and Jonathan Lunine. The field work by J. Orm
¨
o
was partially supported by grants from the Spanish
Ministry of Education and Science (AYA2003-01203
and CGL2004-03215). The equipment used in this
work was purchased by grants to our Center for As-
trobiology from its sponsoring research organizations,
CSIC and INTA.
REFERENCES
Apostolopoulos, D., Wagner, M., Shamah, B., Pedersen, L.,
Shillcutt, K., and Whittaker, W. (2000). Technology
and field demonstration of robotic search for Antarc-
tic meteorites. International Journal of Robotics Re-
search, 19(11):1015–1032.
Bogacz, R., Brown, M. W., and Giraud-Carrier, C. (1999).
High capacity neural networks for familiarity discrim-
ination. In Proceedings of the Ninth International
Conference on Artificial Neural Networks (ICANN99),
pages 773–776.
Crawford, J. and Tamppari, L. (2002). Mars Science
Laboratory – autonomy requirements analysis. In-
telligent Data Understanding Seminar, available on-
line at: http://is.arc.nasa.gov/IDU/slides/reports02/-
Crawford
Aut02c.pdf.
Crisp, J., Adler, M., et al. (2003). Mars Exploration Rover
mission. Journal of Geophysical Research (Planets),
108(2):1.
Freixenet, J., Mu
˜
noz, X., Mart
´
ı, J., and Llad
´
o, X. (2004).
Color texture segmentation by region-boundary coop-
eration. In Computer Vision – ECCV 2004, Eighth
European Conference on Computer Vision, Proceed-
ings, Part II, Lecture Notes in Computer Science.
Prague, Czech Republic, volume 3022, pages 250–
261. Springer. Ed.: T. Pajdla and J. Matas., (Also
available in the CVonline archive).
Goldberg, S., Maimone, M., and Matthies, L. (2002). Stereo
vision and rover navigation software for planetary ex-
ploration. In 2002 IEEE Aerospace Conference Pro-
ceedings, pages 2025–2036.
Gulick, V. C., Hart, S. D., Shi, X., and Siegel, V. L. (2004).
Developing an automated science analysis system for
Mars surface exploration for MSL and beyond. In Lu-
nar and Planetary Science Conference Abstracts, vol-
ume 35, page 2121.
Gulick, V. C., Morris, R. L., Bishop, J., Gazis, P., Alena, R.,
and Sierhuis, M. (2002). Geologist’s Field Assistant:
developing image and spectral analyses algorithms for
remote science exploration. In Lunar and Planetary
Science Conference Abstracts, volume 33, page 1961.
Gulick, V. C., Morris, R. L., Ruzon, M. A., and Roush, T. L.
(2001). Autonomous image analyses during the 1999
Marsokhod rover field test. Journal of Geophysical
Research, 106:7745–7764.
Haddon, J. and Boyce, J. (1990). Image segmentation
by unifying region and boundary information. IEEE
Trans. Pattern Anal. Mach. Intell., 12(10):929–948.
Haralick, R., Shanmugan, K., and Dinstein, I. (1973). Tex-
ture features for image classification. IEEE SMC-3,
6:610–621.
Heidemann, G. (2004). Focus of attention from local color
symmetries. IEEE Trans. Pattern Anal. Mach. Intell.,
26(7):817–830.
McGuire, P., Orm
¨
o, J., G
´
omez-Elvira, J., Rodr
´
ıguez-
Manfredi, J., Sebasti
´
an-Mart
´
ınez, E., Ritter, H.,
Oesker, M., Haschke, R., Ontrup, J., and D
´
ıaz-
Mart
´
ınez, E. (2005a). The Cyborg Astrobiologist:
Algorithm development for autonomous planetary
(sub)surface exploration. Astrobiology, 5(2):230, oral
presentations. Special Issue: Abstracts of NAI’2005:
Biennial Meeting of the NASA Astrobiology Institute,
April 10-14, Boulder, Colorado.
McGuire, P. C., D
´
ıaz-Mart
´
ınez, E., Orm
¨
o, J., G
´
omez-Elvira,
J., Rodr
´
ıguez-Manfredi, J., Sebasti
´
an-Mart
´
ınez, E.,
Ritter, H., Haschke, R., Oesker, M., and Ontrup, J.
(2005b). The Cyborg Astrobiologist: Scouting red
beds for uncommon features with geological signif-
icance. International Journal of Astrobiology, 4:(in
press) http://arxiv.org/abs/cs.CV/0505058.
McGuire, P. C., Orm
¨
o, J., Diaz-Martinez, E., Rodr
´
ıguez-
Manfredi, J., G
´
omez-Elvira, J., Ritter, H., Oesker,
M., and Ontrup, J. (2004a). The Cyborg
Astrobiologist: first field experience. Inter-
national Journal of Astrobiology, 3(3):189–207,
http://arxiv.org/abs/cs.CV/0410071.
McGuire, P. C., Rodr
´
ıguez-Manfredi, J. A., et al. (2004b).
Cyborg systems as platforms for computer-vision
algorithm-development for astrobiology. In
Proc. of the Third European Workshop on Exo-
Astrobiology, 18 - 20 November 2003, Madrid,
Spain, volume ESA SP-545, pages 141–144,
http://arxiv.org/abs/cs.CV/0401004. Ed.: R. A. Harris
and L. Ouwehand. Noordwijk, Netherlands: ESA
Publications Division, ISBN 92-9092-856-5.
Nesnas, I., Maimone, M., and Das, H. (1999). Autonomous
vision-based manipulation from a rover platform. In
Proceedings of the CIRA Conference, Monterey, Cali-
fornia.
ICINCO 2005 - ROBOTICS AND AUTOMATION
290
Olson, C., Matthies, L., Schoppers, M., and Maimone, M.
(2003). Rover navigation using stereo ego-motion.
Robotics and Autonomous Systems, 43(4):215–229.
Pedersen, L. (2001). Autonomous characterization of un-
known environments. In 2001 IEEE International
Conference on Robotics and Automation, volume 1,
pages 277–284.
Sebe, N., Tian, Q., Loupias, E., Lew, M., and Huang, T.
(2003). Evaluation of salient points techniques. Im-
age and Vision Computing, Special Issue on Machine
Vision, 21:1087–1095.
Squyres, S. (2004). private communication.
Squyres, S., Arvidson, R., et al. (2004). The Spirit rover’s
Athena science investigation at Gusev Crater, Mars.
Science, 305:794–800.
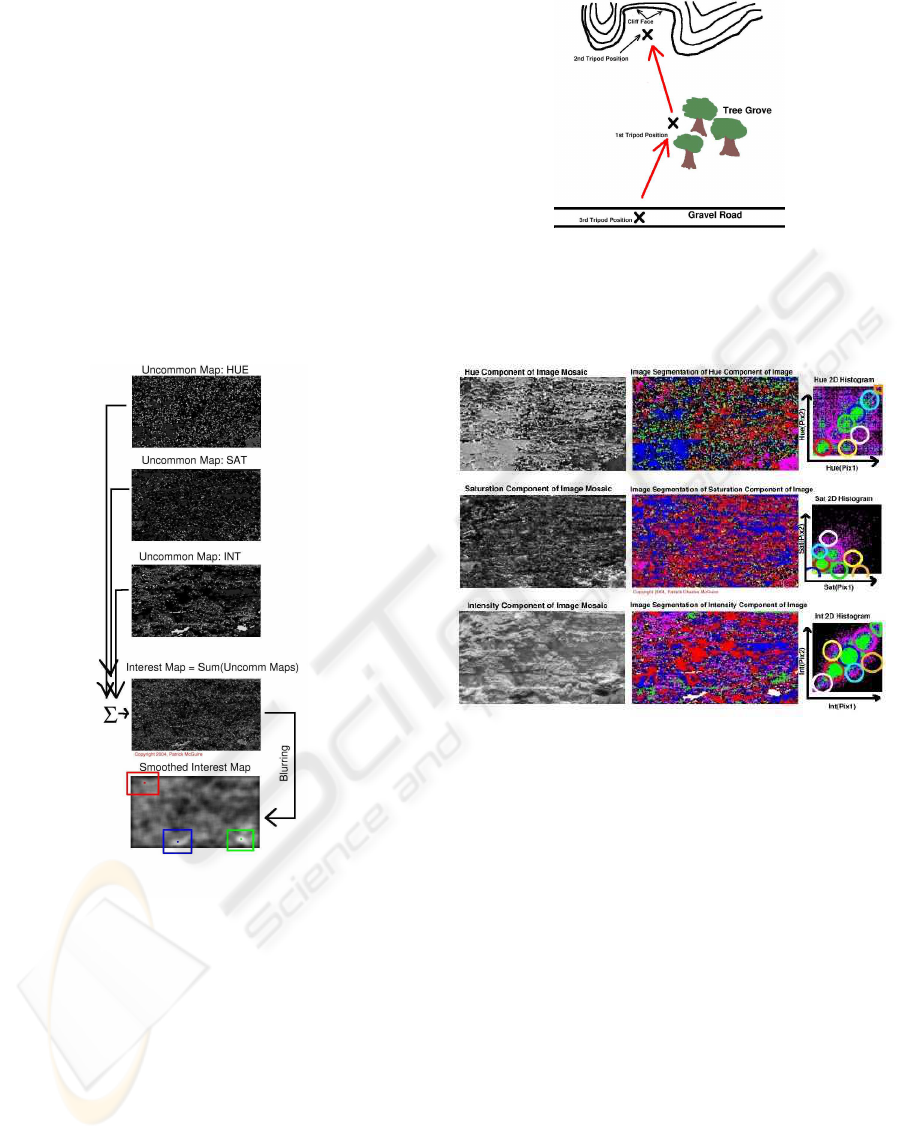
Figure 5: These are the uncommon maps for the mosaic
shown in Fig. 4, based on the region sizes determined by the
image-segmentation algorithm shown in Fig. 7. Also shown
is the interest map, i.e., the unweighted sum of the three un-
common maps. We blur the original interest map before
determining the “most interesting” points. These “most in-
teresting” points are then sent to the camera’s Pan/Tilt mo-
tor in order to acquire and save-to-disk 3 higher-resolution
RGB color images of the small areas in the image around
the interest points (Fig. 4). Green is the most interesting
point. Blue is 2nd most interesting. And Red is 3rd most
interesting.
Figure 6: Map of the Cyborg Astrobiologist’s autonomous
geological approach. The image mosaic that we show in
Figures 4, 5 & 7 in this paper was acquired at the tripod
position near the tree grove.
Figure 7: In the middle column, we show the three image-
segmentation maps computed in real-time by the Cyborg
Astrobiologist system, based upon the original Hue, Satura-
tion & Intensity (H, S & I) mosaics in the left column and
the derived 2D co-occurrence histograms shown in the right
column. The wearable computer made this and all other
computations for the original 3 × 4 mosaic (108 × 192 pix-
els, shown in Fig. 4) in about 2 minutes after the initial ac-
quisition of the mosaic sub-images was completed. The col-
ored regions in each of the three image-segmentation maps
correspond to pixels & their neighbors in that map that have
similar statistical properties in their two-point correlation
values, as shown by the circles of corresponding colors in
the 2D histograms in the column on the right. The RED-
colored regions in the segmentation maps correspond to the
mono-statistical regions with the largest area in this mosaic
image; the RED regions are the least “uncommon” pixels
in the mosaic. The BLUE-colored regions correspond to
the mono-statistical regions with the 2nd largest area in this
mosaic image; the BLUE regions are the 2nd least “uncom-
mon” pixels in the mosaic. And similarily for the PURPLE,
GREEN, CYAN, YELLOW, WHITE, and ORANGE. The
pixels in the BLACK regions have failed to be segmented
by the segmentation algorithm.
FIELD GEOLOGY WITH A WEARABLE COMPUTER: FIRST RESULTS OF THE CYBORG ASTROBIOLOGIST
SYSTEM
291
