
EXAMINATION OF BALL TRACKING AND CATCHING TASK
USING A MONOCULAR VISION-BASED MOBILE ROBOT
Fumiaki TAKAGI, Fumio MIYAZAKI
Graduate School of Engineering Science, Osaka University
Toyonaka, Osaka 560-8531, JAPAN
Ryosuke MORI
Graduate School of Information Science, Tohoku University
Sendai, Miyagi 980-8579, JAPAN
Keywords:
Ball catching, monocular vision, non-holonomic, mobile robot, visual feedback.
Abstract:
This paper presents an implementation of a ball catching task using a monocular vision-based mobile robot.
We have proposed a motion strategy for catching a ball flying in three-dimensional space. This strategy has
its roots in the field of experimental psychology but is more powerful and concentrated on a robot. A practical
trajectory control law is derived for a non-holonomic mobile robot to track and catch a ball. This control law
educes the full potential of the motion strategy: we experimentally demonstrate that a monocular vision-based
mobile robot, coping with the problem due to its non-holonomic constraint, successfully catches a ball.
1 INTRODUCTION
“What information does the fielder sense and how
does the fielder run to the right spot in order to catch
a fly ball?” This problem has interested researchers in
various fields, namely physics, experimental psychol-
ogy, and robotics. Around 40 years ago, Chapman,
physicist, pointed out that the fielder runs so as to
maintain the rate of change of tangent of the elevation
angle of the ball (Chapman, 1968). Recently, some
researches in experimental psychology have shown
evidence that partly supports Chapman’s hypothesis
(McLeod and Dienes, 1993; McLeod et al., 2003).
From a viewpoint of control, some researchers have
studied the formulation of human catching strategy in
connection with perceptual feedback control. Tresil-
ian examined how Chapman’s strategy behaves under
the limiting conditions of human through simulations
(Tresilian, 1995). Borgstadts and Ferrier focused on
how to implement Chapman’s strategy and carried out
experiments using a mobile robot considering only
the case where the fielder exists in the flying ball tra-
jectory (Borgstadts and Ferrier, 2000). Marken also
formulated a perceptual-motor feedback law of hu-
man catching strategy which is slightly different from
Chapman’s strategy (Marken, 2001).
Additionally, McBeath et al. proposed a strategy
named linear optical trajectory (LOT) (McBeath et al.,
1995). Sugar et al. (including McBeath) introduced
the moving image plane and derived various travel-
ing control laws, some of which are based on LOT
and others are based on Chapman’s strategy. They
also performed experiments in which a mobile robot
tracks and catches a balloon or rolling a ball (Suluh
et al., 2001; Sugar and McBeath, 2001; Mundhara
et al., 2002; Mundhara et al., 2003).
On the other hand, we have proposed a new motion
strategy that is more powerful and concentrated on a
robot. Moreover we have implemented a trajectory
control law based on the architecture of visual servo-
ing and analytically showed the ability to track and
catch a ball (Miyazaki and Mori, 2004). However, in
the analysis, we assumed that
1. The horizontal velocity of a ball is negligible;
2. Image Jacobian is exactly available,
which are inadequate in real situation because as-
sumption (1) too much restricts ball’s motion and as-
sumption (2) is hard to be achieved in the monoc-
ular vision system. In this paper, we remove these
assumptions and then derive a new trajectory control
law that enables a monocular vision-based mobile ro-
bot to track and catch a ball. To demonstrate the valid-
ity of the proposed control law, experimental results
are also shown.
100
TAKAGI F., MIYAZAKI F. and MORI R. (2005).
EXAMINATION OF BALL TRACKING AND CATCHING TASK USING A MONOCULAR VISION-BASED MOBILE ROBOT.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 100-105
DOI: 10.5220/0001161801000105
Copyright
c
SciTePress
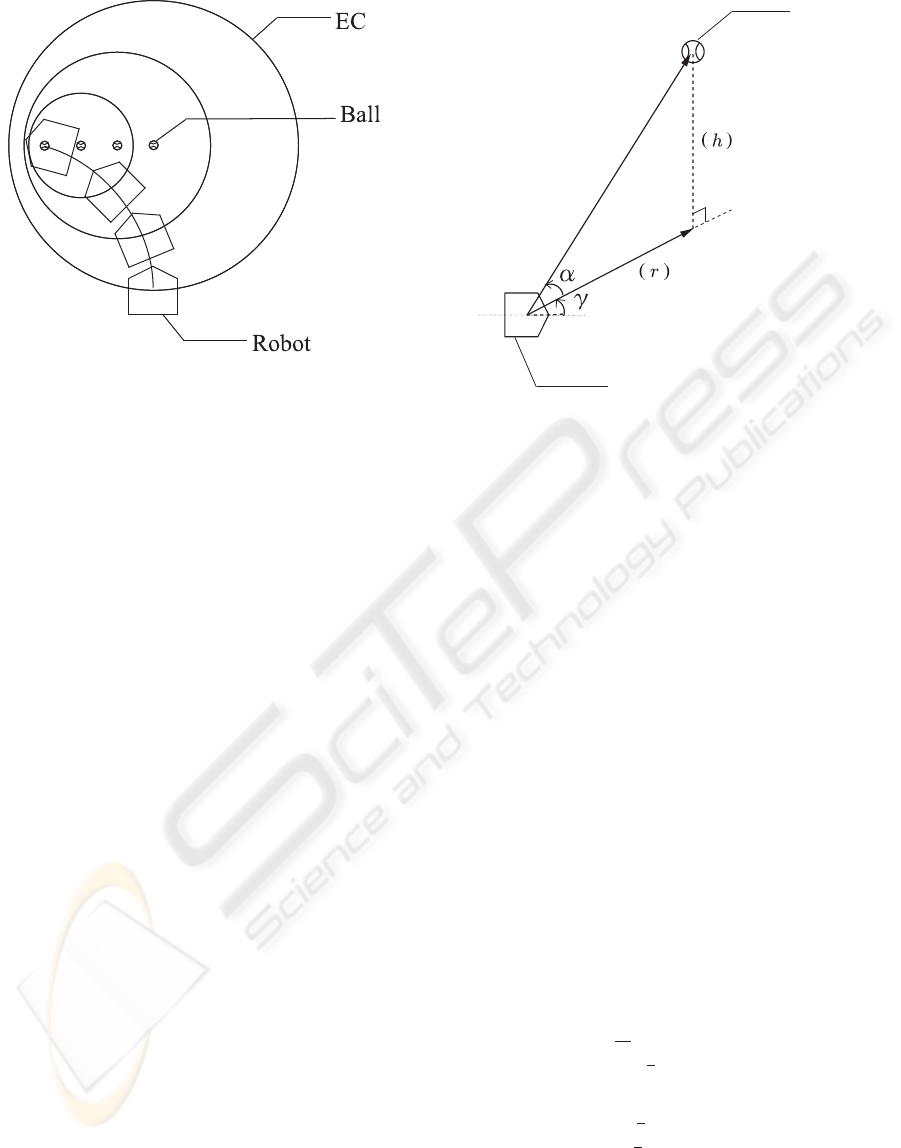
Figure 1: Concept of GAG strategy.
2 ABOUT GAG STRATEGY
We have proposed the motion strategy named GAG
(Gaining elevation Angle of Gaze), which states that
the fielders selects a running path to keep the tan-
gent of elevation angle against the ball continuously
increasing. For the sake of intuitive understanding,
we show the schematic catching based on this strat-
egy in Figure 1. This figure shows a robot pursuing
the ball launched from the center to the left. The cir-
cle termed EC is the equiangular circle (i.e. the set
of points where the measured elevation angle remains
unchanged). It should be noted that “gaining the tan-
gent of the elevation angle of gaze continuously” cor-
responds to “decreasing the radius of EC”.
3 TRAJECTORY CONTROL FOR
BALL CATCHING
3.1 Kinematic model of the mobile
robot
We suppose a wheeled type mobile robot as a robotic
fielder. In a typical model of a non-holonomic mo-
bile robot, the two driving wheels are independently
driven by two actuators to achieve the translation and
orientation. Using the translational velocity v and ro-
tational velocity ω, the kinematic equiation of this
model can be expressed as
˙x
˙y
˙
θ
=
"
cos θ 0
sin θ 0
0 1
#
v
ω
, (1)
Robot
Ball
Figure 2: Relative position between the robot and the ball
where (x, y) and θ denotes the position and orienta-
tion of the mobile robot in a world coordinate frame
respectively.
3.2 Relation between the Robot and
the Ball
In this section, we formulate the rate of change in the
relative position/orientation between the robot and the
ball.
As shown in Figure 2, let α be the elevation angle
of gaze, and γ be the lateral angle of gaze. It should
be noted that these variables can be securely obtained
through a monocular vision system fixed on the robot.
In order to analyze and evaluate the tracking perfor-
mance, we introduce the following two variables un-
available with the monocular vision system: r (the
horizontal distance between the robot and the ball)
and h (the height of the ball from the robot). Then,
the rate of change in these variables due to the robot’s
and ball’s motion can be described as
"
˙r
˙α
˙γ
#
=
− cos γ 0
1
2r
sin 2α cos γ 0
1
r
sin γ −1
v
ω
+
e
T
1
r
l
T
1
r
n
T
w, (2)
where e is the unit vector on the line extending to the
center of EC from the robot, n is the vector obtained
by rotating e about a vertical axis counterclockwise
in the amount 90
◦
, l is the vector obtained by rotating
EXAMINATION OF BALL TRACKING AND CATCHING TASK USING A MONOCULAR VISION-BASED
MOBILE ROBOT
101
the unit vector on the line from the robot to the ball
about a line having the direction of n counterclock-
wise in the amount 90
◦
, and w is the velocity vector
of the ball. The first term in the right hand side is
caused by the robot’s motion and the second term is
by the ball’s motion.
3.3 Control Law
The control law which implements GAG strategy is
given by
v = k
1
cos γ sin 2α (3)
ω = k
2
sin γ sin 2α, (4)
where k
1
, k
2
are the positive constants. This control
law has two advantages over the one we have already
proposed(Miyazaki and Mori, 2004): (i) The image
Jacobian is not required. (ii) Tuning parameters k
1
, k
2
are easily determined. The validity of this control law
is shown in the following section.
3.4 Ball Tracking and Catching
We explain the control law given by Eqs. (3), (4) en-
ables the mobile robot to successfully track and catch
a ball in the following three cases.
(A) A case that a ball is suspended in the air
Let us consider a case that a ball is suspended in the
air. The task objective in this case is to approach a
point just below the ball.
Substituting Eqs. (3), (4) (control inputs) into
Eq. (2) and setting w to be zero yields
˙r = −k
1
cos
2
γ sin 2α ≤ 0. (5)
Equality holds if and only if |γ| = π/2.
In case that |γ| = π/2, the robot has its an-
gular velocity ω = k
2
sin γ sin 2α, thus, ˙γ =
−k
2
sin γ sin 2α, which means the robot rotates in-
stantly and gets out of this situation. Moreover, the
robot stops (v = 0) if and only if it arrives at the
point just below the ball. As a result, the robot as-
ymptotically approaches to the point just below the
ball.
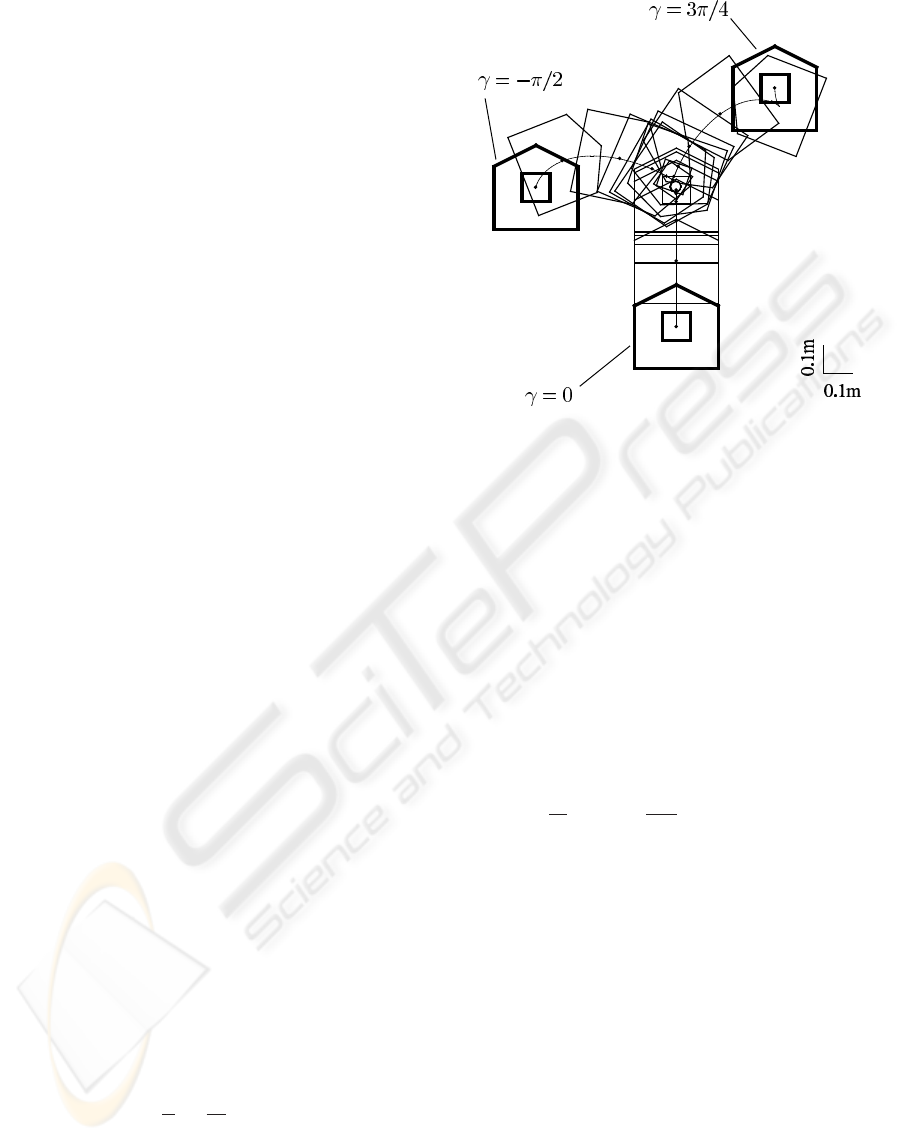
Here arises a simple question we can answer: what
path does the robot follow to track a ball? The curva-
ture of the path is given by
ρ =
ω
v
=
k
2
k
1
tan γ (6)
and consequently proportional to the tangent of ball’s
lateral angle tan γ. Thus, the path of the robot sub-
ject to this control law varies according to the initial
orientation, namely γ. Figure 3 shows various paths
in typical cases. The robot gets forward to just below
Figure 3: Typical paths of the robot subject to Eqs. (3), (4)
illustrated every 0.2 sec (k
1
= 1, k
2
= 13)
the ball if γ = 0. If 0 < γ ≤ π/2, the robot moves to-
ward the inside of EC and gets closer and closer to the
center of EC, though the robot does not know where
the center is. If π/2 < γ ≤ π , first the robot ro-
tates toward the center of EC while getting backward,
and then starts getting forward after the orientation
becomes less than π/2, that is, 0 < γ ≤ π/2. In case
that γ has a minus sign, the robot moves in the same
manner except rotating inversely.
By the way, during the robot’s tracking, the tangent
of elevation angle is kept increasing. The reason is
that its time derivative
d
dt
tan α =
k
1
h
r
2
cos
2
γ sin 2α, (7)
is always positive excepting |γ| = π/2. (In case that
|γ| = π/2, as already mentioned above, the robot
rotates instantly to satisfy |γ| < π/2.) This means
that the radius of EC asymptotically vanishes, in other
words the robot gets closer and closer to the point just
below the ball. This suspended ball case is regarded
as one of the special case among the general tracking
cases shown in Figure 1.
(B) A case that a ball rises and falls without
moving horizontally
Eq. (5) holds in this case as well as in the previous
case (A). This means that the path of the robot subject
to GAG is not dependent on the ball’s vertical motion,
provided that the ball does not move horizontally. In
other words, the path is uniquely determined by the
robot’s initial location and orientation as in the case
(A). Therefore the robot gets closer and closer to the
ICINCO 2005 - ROBOTICS AND AUTOMATION
102

point just below the ball so as to catch the ball. It
is the only difference between the case (A) and the
case (B) that the robot has to reach the catching point
before the ball falls onto the ground. Increasing the
gain k
1
, k
2
brings quick approaching to the catching
point, and then the robot maintains the path provided
the ratio of gain k
1
/k
2
is kept unchanged.
(C) A case that a ball rises and falls while moving
horizontally
Finally, we explain the robot can catch the ball in gen-
eral case that the ball rises and falls while moving
horizontally. Substituting Eqs. (3), (4) (control input)
into Eq. (2) yields
˙r = −k
1
cos
2
γ sin 2α + e
T
w. (8)
If e
T
w ≤ 0, the robot approaches the point just below
the ball similarly to the case (B). This corresponds to
the case that the ball comes up to the robot. Next let us
consider the case that e
T
w ≤ 0, that is, the case that
the ball flies away from the robot. In such a situation,
if γ ≃ 0 holds after pursuing the ball for a while, the
time derivative of r becomes
˙r = −k
1
sin 2α + kwk. (9)
Here, from sin 2α = 2hr/(h
2
+ r
2
), the distance be-
tween the ball and the robot converges to r
p
given by
r
p
=
hkwk
2k
1
(10)
provided the gain k
1
is large enough in compari-
son with the ball’s horizontal velocity kwk. This
means that the robot approaches the ball according to
Eq. (10) and catches the ball when the ball falls onto
ground (r → 0 as h → 0).
In the meantime, from Eq. (2) and Eqs. (3), (4), we
get
˙γ =
1
r
k
1
sin γ cos γ sin 2α−k
2
sin γ sin 2α+
1
r
n
T
w,
(11)
where the first and second terms in the right hand side
are negative provided
−k
2
+
k
1
r
cos γ < 0 (12)
excepting the case that γ = π.
This means that, if
k
2
k
1
>
1
r
(13)
is satisfied, Eq. (11) gives
˙γ < −
k
1
r
(1 − cos γ) sin γ sin 2α +
1
r
n
T
w. (14)
This implies that |γ| remains small if the gain k
1
is
large enough compared with kwk
Figure 4: Path of the robot pursuing a ball
0 0.2 0.4 0.6 0.8 1
0
0.1
0.2
0.3
0.4
Time [sec]
r [m]
r (k
1
= 3, k
2
= 39)
r
p
Figure 5: Change in the distance to the ball
From condition Eq. (13) and r
p
given by Eq. (13),
we can conclude as follows: The horizontal distance
between the ball and the robot approaches the value
r
p
=
hkwk
2k
1
(15)
provided that we choose large enough gains k
1
, k
2
satisfying
k
2
k
1
>
1
r
p
. (16)
To verify this analysis, we show simulation results
obtained by assuming that the ball moves under the
influence of gravity. Figure 4 shows typical paths of
the robot pursuing a fly ball. From this figure, we can
see that GAG works well regardless of the robot’s ini-
tial location and orientation. The time histroy of the
radius of EC is given in Figure 5 for a certain pursuing
motion (corresponding to the green curve in Figure 4,
which demonstrates that the radius of EC decreases
according to the parabolic function of time given by
Eq. (10) (the dotted curve in Figure 5).
EXAMINATION OF BALL TRACKING AND CATCHING TASK USING A MONOCULAR VISION-BASED
MOBILE ROBOT
103

4 EXPERIMENT
We constructed a monocular vision-based mobile ro-
bot to verify our proposed method experimentally. An
IEEE1394 camera with a fish-eye lens and ball catch-
ing device are mounted on a mobile base that commu-
nicates with a desktop PC through RS-232C. The total
length and width of the mobile base are 300[mm] and
the maximum velocity is 2[m/sec]. The translational
and angular velocities of the robot are determined us-
ing the information extracted from 2D image, namely
elevation angle α and lateral angle γ by Eqs. (3), (4)
at the video rate, 33[msec]. The commands of the
translational and angular velocities are converted into
wheel velocities and transmitted from the desktop PC
to the mobile base and the motors of right and left
wheels are controlled by a servo controller on the mo-
bile base.
4.1 Method
The experimental procedures are as follows: The ball
is thrown by a person or a ball launcher. As soon as
the camera mounted on the mobile robot gets sight of
the ball, the robot begins running to catch the ball.
Every 33 [msec], the frame rate of the video camera,
the ball’s image is acquired and the velocity command
is sent to the robot. The moment the robot reaches the
catching point and then catches the ball, the ball gets
out of the sight and the robot stops.
4.2 Result and Discussion
We have carried out experiments to verify the effec-
tiveness of the proposed control law based on GAG
strategy. The following result demonstrates how the
robot behaves in a real situation.
The ball is thrown up about 50 [cm] in front of and
20 [cm] on the right of the robot. The result is shown
in Figure 6 and Figure 7. Figure 6 is a sequential pho-
tograph where the ball and the robot is extracted. In
Figure 7 the location of the ball and the robot is plot-
ted in a world coordinate frame. These results indi-
cate that a mobile robot subject to GAG successfully
catches a ball.
5 CONCLUSION
This paper presented an implementation of ball catch-
ing task using a monocular vision-based mobile ro-
bot: (1) Our proposed GAG strategy was employed
as a motion strategy to track a ball; (2) A practical
trajectory control law is derived for a non-holonomic
Figure 6: Ball catching by a wheeled mobile robot with
monocular vision system
−100
0
100
200
300
400
500
0
200
400
0
500
1000
1500
X [mm]
Y [mm]
Z [mm]
Figure 7: Path of the robot pursuing a ball
mobile robot to track and catch a ball, which is an im-
plementation of GAG strategy. Moreover, we demon-
strated that the robot can catch a ball flying in three-
dimensional space using the monocular vision sys-
tem. This demonstration exemplifies the potency of
the GAG strategy and the practicality of its control
law.
The GAG strategy was devised aiming at robotic
fielders rather than explaining of human catching
strategy. The robot subject to the GAG strategy is re-
quired to have the ability to run faster than the ball
for a reliable ball catching. However, we can utilize
GAG beyond baseball. For example, GAG is suited
ICINCO 2005 - ROBOTICS AND AUTOMATION
104

to autonomous navigation for mobile robots if we re-
gard a fly ball as a marker in the environment. In the
autonomous rendezvous and docking task of space-
crafts, GAG can be extended to a simple and robust
onboard rendezvous control strategy by considering
a fielder as a chaser spacecraft and a ball as a target
spacecraft.
REFERENCES
Borgstadts, J. A. and Ferrier, N. J. (2000). Interception of
a projectile using a human vision-based strategy. In
IEEE Int. Conf. on Robotics and Automation.
Chapman, S. (1968). Catching a baseball. American Jour-
nal of Physics, 36:868–870.
Hutchinson, S., Hager, G. D., and Corke, P. (1996). A tuto-
rial on visual servo control. IEEE Trans. on Robotics
and Automation, 12(5):651–670.
Marken, R. S. (2001). Controlled variables: psychology
as the center fielder views it. American Journal of
Psychology, 114(2):259–281.
McBeath, M. K., Shaffer, D. M., and Kaiser, M. K. (1995).
How baseball outfielders determine where to run to
catch fly balls. Science, 268:569–573.
McLeod, P. and Dienes, Z. (1993). Running to catch the
ball. Nature, 362:23.
McLeod, P., Reed, N., and Dienes, Z. (2003). How fielders
arrive in time to catch the ball. Nature, 426:243–244.
Miyazaki, F. and Mori, R. (2004). Realization of ball catch-
ing task using a mobile robot. In ICNSC’04, 1st IEEE
International Conference on Networking Sensing and
Control, pages 58–63.
Mundhara, K., , Sugar, T., and McBeath, M. (2003). Per-
ceptual navigation strategy: A unified approach to in-
terception of ground balls and fly balls. In IEEE Int.
Conf. on Robotics and Automation, pages 1689–1694.
Mundhara, K., Suluh, A., Sugar, T., and McBeath, M.
(2002). Intercepting a falling object: Digital video ro-
bot. In IEEE Int. Conf. on Robotics and Automation,
pages 2060–2065.
Sugar, T. and McBeath, M. (2001). Spatial navigation al-
gorithm: Application to mobile robotics. In Vision
Interface.
Suluh, A., Sugar, T., and McBeath, M. (2001). Spatial nav-
igational principles: Apprications to mobile robotics.
In IEEE Int. Conf. on Robotics and Automation.
Tresilian, J. R. (1995). Study of a servo-control strategy for
projectile interception. Quarterly Journal of Experi-
mental Psychology, 48:688–715.
EXAMINATION OF BALL TRACKING AND CATCHING TASK USING A MONOCULAR VISION-BASED
MOBILE ROBOT
105
