COMBINING MANUAL HAPTIC PATH PLANNING OF
INDUSTRIAL ROBOTS WITH AUTOMATIC PATH SMOOTHING
Heinz W
¨
orn, Bj
¨
orn Hein, Detlef Mages
Institute for Process Control and Robotics (IPR), Universit
¨
at Karlsruhe (TH), Engler-Bunte-Ring 8,
76131 Karlsruhe, Germany,
Berend Denkena, Rene Apitz, Pawel Kowalski
Institute of Production Engineering and Machine Tools (IFW), Universit
¨
at Hannover, Schoenebecker Allee 2,
30823 Garbsen, Germany,
Niels Reimer
Tecnomatix GmbH, Richard-Reitzner-Allee 8, 85540 Haar (M
¨
unchen), Germany
Keywords:
robot programming, path smoothing, haptic manipulation, robot simulation, industrial robotics.
Abstract:
Nowadays, industrial robots are preferably programmed offline, i.e. without interference with the real cell
and running production processes. Usually a simulation tool is used to manually define individual locations
and to check the created raw path for possible collisions. Within this paper an approach is presented, that
combines a haptic input device by means of automated path smoothing. The quality of the generated path
can be significantly improved by subsequent automatic filtering. Removing redundant locations or modifying
intermediate ones increases the smoothness of the path. The semi-automatic programming paradigm with
haptic interaction is expected to lead to an improved workflow for robot offline programming.
1 INTRODUCTION
Today, offline robot paths are usually defined man-
ually, which is a time-consuming and error-prone
process, in particular with regard to the fact that in-
dustrial robots have up to six degrees of freedom. This
paper discusses an integration of means of virtual re-
ality and automated path smoothing.
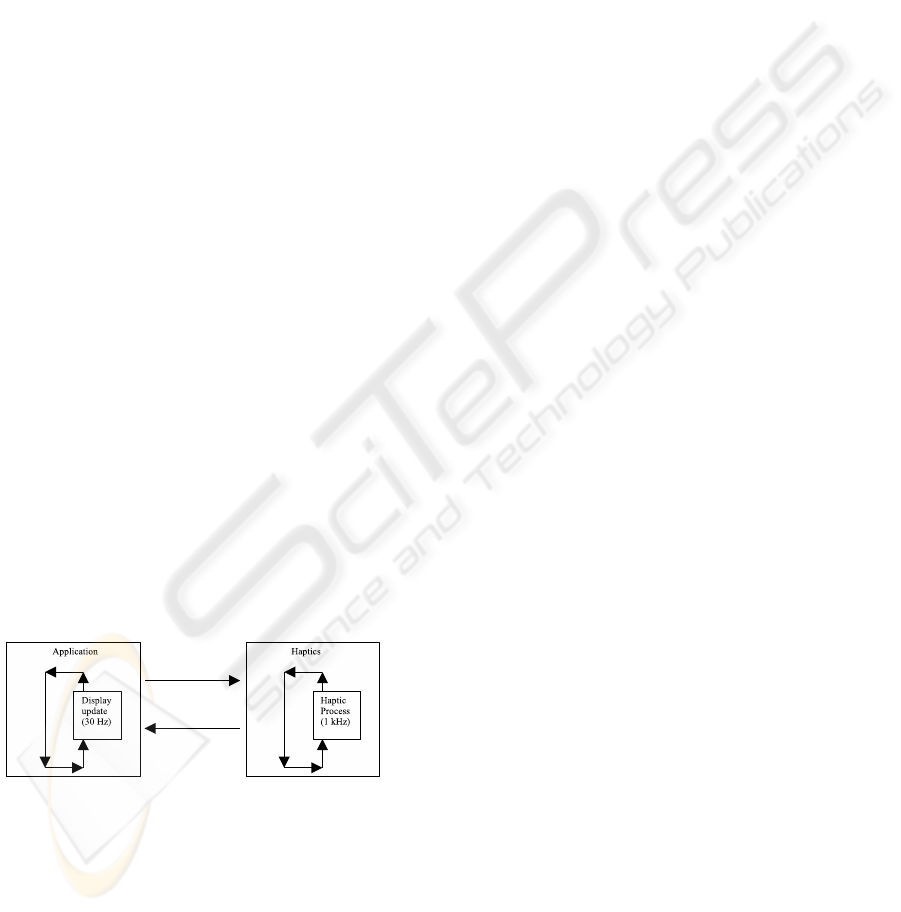
Figure 1: Coordination of haptics and the application
In robot simulation systems paths are traditionally
created with a mouse. First the robot is moved to the
desired start. This can normally be done by moving
the axes of the robot individually or by moving the
tool center point. Often a robot can reach one loca-
tion with different poses so the user must select one
via a configuration dialog. When the robot is in the
right position, the user adds a new point and places
it at the desired position. After that, the created path
is visually checked for collision-freeness. This cy-
cle is repeated until a collision-free path from start
to goal is generated. Due to the high number if iter-
ation steps, this process is time-consuming and very
monotone (repeating the same steps over and over) for
the user.
2 HAPTIC PATH GENERATION
Virtual reality covers perception by all human senses.
One of these senses is the sense of touch, i.e. haptics
(Burdea, 1996). Nowadays, the most popular fields
of application for this science are medicine and en-
gineering. Within the field of medical sciences, hap-
tics has been successfully used for training and sim-
ulation of surgeries (Cakmak and K
¨
uhnapel, 2000).
Within engineering applications, haptic devices have
been first used for modeling complex free-form ob-
jects, where virtual clay is used for designing (Fu-
jiki and Aoyama, 1999). Haptic devices can also be
used for programming machine tools (T
¨
onshoff et al.,
2001). Efforts have also been made to interact with
robots via haptic devices. These approaches, how-
ever, focus mainly on direct manipulation (Kesavadas
387
Wörn H., Hein B., Mages D., Denkena B., Apitz R., Kowalski P. and Reimer N. (2005).
COMBINING MANUAL HAPTIC PATH PLANNING OF INDUSTRIAL ROBOTS WITH AUTOMATIC PATH SMOOTHING.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 387-390
DOI: 10.5220/0001161903870390
Copyright
c
SciTePress

and Subramanium, 1998).
The Phantom device was originally developed at
MIT at the beginning of the 1990s (Massie and Salis-
bury, 1994). Presently, it is one of the most popular
and advanced haptic interfaces available on the mar-
ket. Working with the Phantom, the user holds a sty-
lus or a thimble-like end effector and can freely move
the device within its workspace, taking advantage of
six degrees of freedom (DOF). According to the pro-
grammed behavior, forces and torques are generated
to enable interaction with the virtual world. The up-
date rate in the force servo loop is about 1kHz to en-
sure haptic feedback quality. For lower update rates,
high-frequency discontinuities and hard surfaces be-
come either soft or unstable (Mark et al., 1996).
The goal of integrating haptic interaction into
the process of robot programming is an increase in
efficiency. This issue is especially important for
programming robot movements in narrow passages
where the collision probability is high. An additional
advantage is the possibility to move all axes simulta-
neously. This adapts the programming to real world
conditions and allows evaluating the process more ac-
curately.
The kinematics of the Phantom is not supposed to
reflect a robot. The user who operates the device is
able to control the tool center point (TCP) of a robot,
not its individual joints. Otherwise each robot model
would need a dedicated haptic device.
In contrary to the high update rates for haptic feed-
back quality, the frequency for sufficient visual feed-
back is below 30Hz. However, it is necessary to coor-
dinate these two tasks (figure 1) in order to assure sta-
ble and ergonomic working conditions. This concept
of two different update rates has been implemented
in the presented approach. The servo loop runs in-
dependently from the main application thread. The
current situation in the robot cell is sent regularly to
the servo thread to generate the forces accordingly. A
typical example for a force that is directed against the
movement initiated by the user is an occurring colli-
sion with an obstacle.
Apart from signaling collisions, the Phantom may
provide interaction with a robot cell in other cases as
well. Such cases include for example approaching an
obstacle, detecting disadvantageous movements, or
leaving the workspace. It can also be used for direct
input of points and paths as well as for selecting or
manipulating objects. At the present state of research,
a haptic device can be hardly considered to fully re-
place the contemporary methods of path input. One
of the most important reasons is the natural tremor of
human hand. However, this drawback can be dimin-
ished by employing smoothing algorithms.
3 SMOOTHING
The path smoothing algorithm presented here is based
on the method described in (Berchtold and Glavina,
1994) and tested in (Hein, 2003). Its input is a path
that is either generated by an automatic algorithm or
manually drafted e.g. by a haptic device. A path con-
sists usually of so called point to point (PTP) move-
ments. PTP means that all axes of the robot are moved
simultaneously along a straight line in the configu-
ration space of the robot. Start and end location of
a PTP movement are reached simultaneously. The
algorithm tries to erase points that are redundant in
two senses. First, collinear segments can be reduced
(remove the intermediate points) to one segment, see
section 3.1.1. Secondly, vertices that can safely be
deleted without harming the collision-freeness of the
path are considered redundant, see section 3.1.2.
The algorithm smooths the path by inserting and
deleting vertices at promising locations. In the fol-
lowing text the notion “sharp vertex” is used, which
is a vertex that has a small angle defined by its ad-
jacent segments. The input data for the algorithm is
a (rough) path in configuration space that has to be
collision-free. All robot poses along the path in con-
figuration space must result in a collision-free situa-
tion in work space. (Mages et al., 2004; Schwarzer
et al., 2004)
3.1 Components of the algorithm
3.1.1 Linear redundant points
Linear redundant points can be identified by the angle
between two neighboring segments. A location p
i
is
chosen by the algorithm. If the angle between seg-
ment
p
i−1
p
i
and p
i
p
i+1
is π, the two segments can
be combined by removing the central point (see figure
2). No collision checks are necessary in this case.
3.1.2 Redundant points at vertices
S
S
S
S
S
S
Start
S
S
S
S
Result
Figure 2: Removal of redundant points on a linear segment
A vertex can be deleted if the collision-freeness of
the resulting path is still guaranteed. The vertex p
i
can
be deleted if the segment
p
i−1
p
i+1
is collision-free.
This can be accomplished if the smoothing oper-
ation described in 3.1.3 is executed with parameter
t
end
= 1. Then only one segment has to be checked
ICINCO 2005 - ROBOTICS AND AUTOMATION
388

S
S
S
S
Start
S
S
S
S
p
3
S
S
S
p
4
Figure 3: Removal of redundant points on a path. Special
case with t
end
= 1 (see 3.1.3). Candidate p
3
fails and p
4
succeeds.
for each vertex. This method combined with the
method from section 3.1.1 represent already a run-
ning smoothing algorithm that needs very few colli-
sion checks. This can be helpful when dealing with
complex scenes where collision checking is computa-
tionally expensive.
3.1.3 Cutting off sharp vertices
For sharp vertices it is desirable to increase the angle
between their two segments. To accomplish this, ad-
ditional points can be inserted at each of the segments
that are adjacent to the sharp vertex. Considering a
vertex p
i
two points p
i,1
and p
i,2
are inserted. The
new edge
p
i,1
p
i,2
must be checked for collision. If
a collision occurs, t is increased. Parameter t speci-
fies the number of steps made by this strategy starting
with t = 0.
p
i,1
(t) = p
i
+
p
i−1
− p
i
2
t
p
i,2
(t) = p
i
+
p
i+1
− p
i
2
t
This strategy terminates when
p
i
p
i,{1|2}
(t)
< ǫ
or t ≥ t
end
. The variables ǫ and t
end
are pa-
rameters of the algorithm. In the worst case (i.e.
when no solution can be found for the current ver-
tex) min
log
2
min(|p
i+1
−p
i
|,|p
i−1
−p
i
|
ǫ
, t
end
col-
lision checks for segments have to be calculated.
The methods described in section 3.1.1 and 3.1.2
are special cases of this smoothing operation. For sec-
tion 3.1.2 the parameter t
end
= 1 and for section 3.1.1
t
end
= 1 ∧ ∠(p
i−1
, p
i
, p
i+1
) = π.
S
S
S
Start
S
S
S
S
S
t = 0
S
S
S
S
S
t = 1
S
S
S
S
t = 2
Figure 4: Cutting sharp vertices by introducing an addi-
tional segment. In step t = 0 and t = 1 the new segment
collides. In step t = 2 a feasible segment is found.
3.1.4 Choosing a location for improvement
A location best suited for optimization is chosen by
a heuristics function. This function should evalu-
ate the highest priority for a location that is linear
redundant. Sharp vertices are unfavorable, so they
should be assigned a high priority for changing. The
heuristics function h(i) =
|p
i−1
−p
i
|+|p
i
−p
i+1
|
|p
i−1
−p
i+1
|
as-
signs p
i
a higher value if the angle between the seg-
ments
p
i−1
p
i
and p
i
p
i+1
is sharp or equal to π. If
∠(p
i−1
, p
i
, p
i+1
) = π then h(i) is set to ∞. The
heuristic value is used to order the candidates. The
improvement operation is used at each location that is
chosen by h. First the special cases described in 3 are
checked followed by the phase according to 3.1.3 if
t
end
and ǫ allow it.
3.2 Termination
The termination of the algorithm is trivial if all seg-
ments except a straight line from start to goal can be
erased, but in each new step a vertex may be added to
the path, see 3.1.3. To circumvent an infinite iteration
a quality measure allows terminating the algorithm.
As a quality measure the sum of angles between sub-
sequent segments is used. If several steps do not lead
to an improvement of the whole path, the smoothing
can be considered finished.
4 TEST CASES AND RESULTS
For tests of the described approach a robot cell has
been designed. To demonstrate the algorithms the
cell is kept as simple as possible. The only objects
are a robot and an obstacle. Three paths have been
proposed as the input for the smoothing algorithm: a
linear one, a rectangular one and one in shape of an
arc. Each of them has been generated using the haptic
device. When a specified distance from the previous
point is exceeded a new point is created.
Line Rectangle Arc
Figure 5: Test cases. Top row: raw input path from haptics.
Bottom row: smoothed paths
As can be seen in figures 5 and 6, the created path is
not smooth. In consequence, it takes longer to move
COMBINING MANUAL HAPTIC PATH PLANNING OF INDUSTRIAL ROBOTS WITH AUTOMATIC PATH
SMOOTHING
389

a robot along such a path. The time for moving along
a path is a good measure for path quality as it is the
most crucial factor in production.
Manual Haptic
Smooth
Figure 6: Complex test case. Manual: Path was generated
using a mouse. Haptic: Path was generated using the Phan-
tom device. Smooth: Path from Haptic that was smoothed.
In table 1 the time the robot needs to move with
PTP motions along the result path is displayed. The
table shows the time before smoothing (haptic), after
smoothing with t
end
= 1 and t
end
= ∞.
The time needed for programming the movement
is important. In the complex scene the programming
using a mouse in a professional robot simulation ap-
plication took the authors about 150s. In contrast to
that, defining the path with a haptic device took only
15s. The subsequent run of the smoothing algorithm
took 75s, which is very long due to the slow distance
calculation used as a basis for the collision check on
segments in this test. In this example the time bene-
fit of the approach is about 70%. The smoothing can
take place in the background, so only 10% is actual
user interaction.
Table 1: Results of tests with smoothing manual haptic gen-
erated paths. A simple interpolator is used. Only the accel-
eration and the maximum speed of the robot are considered.
Test haptic t
end
= 1 t
end
= ∞
Line 12.11s 2.35s 2.35s
Rectangle
19.03s 4.43s 3.73s
Arc
16.09s 5.07s 4.38s
Complex
26.48s 5.32s 5.29s
5 CONCLUSION AND OUTLOOK
The presented paper targets new methods in robot
offline programming by integrating haptic input and
output. One important factor is path quality. By
using e.g. a Phantom device, many points can be
created easily that define the desired collision-free
path. Though, these paths are not well-suited to be
used directly. It is desirable to remove the redundant
points. The smoothing algorithm described here in-
creases path quality. At the present state only the geo-
metric path is considered. To evaluate the impact on
the process of manual path planning, a survey with
users of simulation systems is planned.
REFERENCES
Berchtold, S. and Glavina, B. (1994). Kosten-Nutzen-
optimale Verbesserung kollisionsfreier Roboterbewe-
gungen mittels Polygon-Manipulation. In 10. Fachge-
spr
¨
ach Autonome mobile Systeme.
Burdea, G. (1996). Force and Touch Feedback for Virtual
Reality. John Wiley & Sons, New York.
Cakmak, H. and K
¨
uhnapel, U. (2000). Animation and
Simualtion Techniques for VR-Tranining Systems in
Endoscopic Surgery. In EGCS 2000, Eurographics
Workshop on Animation and Simulation, pages 173–
185.
Fujiki, H. and Aoyama, H. (1999). Development of virtual
clay modeling system. In 32nd CIRP International
Seminar on Manufacturing Systems, New Supporting
Tools for Designing Products and Production Systems,
pages 91–97.
Hein, B. (2003). Automatische offline Programmierung von
Industrierobotern in der virtuellen Welt. PhD thesis,
Universit
¨
at Karlsruhe(TH).
Kesavadas, T. and Subramanium, H.(1998). Flexible virtual
tools for programming robotic finishing operations. In
Industrial Robot, volume 25, pages 268–275.
Mages, D., Hein, B., and W
¨
orn, H. (2004). An-
gen
¨
aherte Abstandstransformation vom Arbeitsraum
in den Konfigurationsraum von Robotern mit serieller
Kinematik. In Proceedings Robotik 2004, M
¨
unchen.
Mark, W. R., Randolph, S. C., Finch, M., Verth, J. M. V.,
and Taylor, R. M. (1996). Adding Force Feedback
to Graphics Systems: Issues and Solutions. In SIG-
GRAPH 96 Conference Proceedings, pages 447–452.
Massie, T. and Salisbury, J. (1994). The Phantom haptic
interface: a device for probing virtual objects. In Pro-
ceedings of the ASME Witner Annual Meeting.
Schwarzer, F., Saha, M., and Latombe, J. C. (2004). Exact
Collision Checking of Robot Paths. In Boissonnat, J.,
Burdick, J., Goldberg, K., and Hutchinson, S., editors,
Algorithmic Foundations of Robotics V, pages 25–41.
Springer Tracts in Advanced Robotics.
T
¨
onshoff, H., B
¨
oß, V., and Rackow, N. (2001). Virtual Real-
ity for NC-Programming. In ICPE, 10th International
Conference on Precision Engineering, Initiatives of
Precision Engineering at the Beginning of the Mille-
nium.
ICINCO 2005 - ROBOTICS AND AUTOMATION
390
