
EFFICIENT LINEAR APPROXIMATIONS TO STOCHASTIC
VEHICULAR COLLISION-AVOIDANCE PROBLEMS
Dmitri Dolgov
Toyota Technical Center, USA, Inc.
2350 Green Rd., Suite 101, Ann Arbor, MI 48105, USA
Ken Laberteaux
Toyota Technical Center, USA, Inc.
2350 Green Rd., Suite 101, Ann Arbor, MI 48105, USA
Keywords:
Decision support systems, Vehicle control applications, Optimization algorithms.
Abstract:
The key components of an intelligent vehicular collision-avoidance system are sensing, evaluation, and de-
cision making. We focus on the latter task of finding (approximately) optimal collision-avoidance control
policies, a problem naturally modeled as a Markov decision process. However, standard MDP models scale
exponentially with the number of state features, rendering them inept for large-scale domains. To address this,
factored MDP representations and approximation methods have been proposed. We approximate collision-
avoidance factored MDP using a composite approximate linear programming approach that symmetrically
approximates objective functions and feasible regions of the LP. We show empirically that, combined with a
novel basis-selection method, this produces high-quality approximations at very low computational cost.
1 INTRODUCTION
Vehicular collisions are a leading cause of death and
injury in many countries around the world: in the
United States alone, on an average day, auto acci-
dents kill 116 and injure over 7900, with an annual
economic impact of around $200 billion (NHTSA,
2003); the situation in the European Union is simi-
lar with over 100 deaths and 4600 injuries daily, and
the annual cost of
C160 billion (CARE, 2004). Gov-
ernments and automotive companies are responding
by making the reduction of vehicular fatalities a top
priority (e.g., (ITS, 2003; Toyota, 2004)).
Key to reducing auto collisions is improving
drivers’ recognition and response behaviors, technol-
ogy often described as an Intelligent Driver Assistant
(e.g., (Batavia, 1999)). This driver assistant would di-
rect a driver’s attention to a safety risk and potentially
advise the driver of appropriate counter-measures.
Such a system would require new sensing, evaluation,
and decision-making technologies.
This work focuses on the latter task of construct-
ing approximately optimal collision-avoidance poli-
cies. We represent the stochastic collision-avoidance
problem as a Markov decision process (MDP) – a
well-studied, simple, and elegant model of stochas-
tic sequential decision-making problems (Puterman,
1994). Unfortunately, classical MDP models scale
very poorly, as the size of the flat state space increases
exponentially with the number of environment fea-
tures (e.g., number of vehicles) – the effect commonly
referred to as the curse of dimensionality.
Fortunately, many problems are well-structured
and admit compact, factored MDP representations
(Boutilier et al., 1995), leading to drastic reductions
in problem size. However, a challenge in solving fac-
tored MDPs is that well-structured problems do not
always lead to well-structured solutions (Koller and
Parr, 1999), making approximations a necessity. One
such technique that has recently proved successful in
many domains is Approximate Linear Programming
(ALP) (Schweitzer and Seidmann, 1985; de Farias
and Roy, 2003; Guestrin et al., 2003).
We show that vehicular collision-avoidance do-
mains can be modeled compactly as factored MDPs,
and further, that ALP techniques can be successfully
applied to such problems, yielding very high-quality
results at low computational cost (attaining exponen-
tial speedup over flat MDP models). We use the
composite ALP formulation of (Dolgov and Durfee,
2005), which approximates both the primal and the
dual variables of LP formulations of MDPs, thus sym-
metrically approximating their objective functions
and feasible regions. ALP methods are extremely
sensitive to the selection of basis functions and the
specifics of the approximation of the feasible re-
gion, with only greedy and domain-dependent basis-
275
Dolgov D. and Laberteaux K. (2005).
EFFICIENT LINEAR APPROXIMATIONS TO STOCHASTIC VEHICULAR COLLISION-AVOIDANCE PROBLEMS.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics, pages 275-278
Copyright
c
SciTePress

selection methods currently available (Patrascu et al.,
2002; Poupart et al., 2002). The second contribution
of this work is a method for automatically construct-
ing basis functions, which, as demonstrated by our
empirical evaluation, works very well for collision-
avoidance problems (the idea also extends naturally
to other domains that are similarly well-structured).
2 FACTORED MDPS AND ALP
We model the collision-avoidance problem as a sta-
tionary, discrete-time, fully-observable, discounted
MDP (Puterman, 1994), which can be defined as
hS, A, P, R, γi, where: S = {i} and A = {a} are fi-
nite sets of states and actions, P : S × A × S 7→ [0, 1]
is the transition function (P
iaj
is the probability of
transitioning to state j upon executing action a in
state i), and R : S × A 7→ [R
min
, R
max
] defines the
bounded reward function (R
ia
is the reward for exe-
cuting action a in state i), and γ is the discount factor.
An optimal solution to such an MDP is a stationary,
deterministic policy π : S×A 7→ [0, 1], and the key to
obtaining it is to compute the optimal value function
v : S 7→ R, which specifies, for every state, the ex-
pected total reward of starting in that state and acting
optimally thereafter. The value function can be com-
puted, for example, using the following primal linear
program of an MDP (Puterman, 1994):
min
X
i
α
i
v
i
v
i
≥ R
ia
+ γ
X
j
P
iaj
v
j
, (1)
where α
i
> 0 are arbitrary constants. It is often useful
to consider the equivalent dual LP:
max
X
i,a
R
ia
x
ia
X
a
x
ja
− γ
X
i,a
x
ia
P
iaj
= α
j
(2)
where x ≥ 0 are called the occupation measure (x
ia
is
the expected discounted number executions of action
a in state i). Thus, the constraints in (eq. 2) ensure the
conservation of flow through each state.
A weakness of such MDPs is that they require
an explicit enumeration of all system states. To ad-
dress this issue, factored MDPs have been proposed
(Boutilier et al., 1995; Koller and Parr, 1999) that de-
fine the transition and reward functions on state fea-
tures z ∈ Z. The transition function is specified as a
dynamic Bayesian network, with the current state fea-
tures viewed as the parents of the next step features:
P
iaj
= P (z(j)|z(i), a) =
N
Y
n=1
p
n
(z
n
(j)|a, z
p
n
(i)),
The reward function for a factored MDP is compactly
defined as R
ia
=
P
M
m=1
r
m
(z
r
m
(i), a).
Approximate linear programming (Schweitzer and
Seidmann, 1985; de Farias and Roy, 2003) lowers the
dimensionality of the objective function of the primal
LP (eq. 1) by restricting the space of value functions
to a linear combination of predefined basis functions:
v
i
= v(z(i)) =
K
X
k=1
h
k
(z
h
k
(i))w
k
, (3)
where h
k
(z
h
k
) is the k
th
basis function defined on a
small subset of the state features Z
h
k
⊂ Z, and w are
the new optimization variables. Such a reduction is
only beneficial if each basis function h
k
depends on a
small number of state features. Using the above sub-
stitution, LP (eq. 1) can be approximated as follows:
min α
T
Hw
AHw ≥ r, (4)
where we introduce A
ia,j
= δ
ij
− γP
iaj
(δ
ij
is the
Kronecker delta δ
ij
= 1 ⇔ i = j).
This approximation reduces the number of opti-
mization variables from |S| to |w|, but the number
of constraints remains exponential at |S||A|. There
are several ways of addressing this. One way is to
sample the constraint set (de Farias and Roy, 2004),
which works, intuitively, because once the number of
optimization variables is reduced as in (eq. 4), only
a small number of constraints remain active. This
method is very sensitive to the distribution over which
the constraint set is sampled, i.e., a poor choice of a
subset of the constraints could significantly impair the
effectiveness of this method. Another method (which
does not further approximate the solution, beyond
(eq. 3)) is to restructure the constraints using the prin-
ciples of non-serial dynamic programming (Guestrin
et al., 2003). Unfortunately, the worst-case complex-
ity of this approach still grows exponentially with the
number of state features.
We use another approach, proposed in (Dolgov and
Durfee, 2005), which applies linear approximations
to both the primal (v) and the dual (x) coordinates,
effectively approximating both the objective function
and the feasible region of the LP. Let us consider the
dual of the ALP (eq. 4) and apply a linear approxi-
mation of the dual coordinates: x = Qy to the result,
yielding the following composite ALP:
max r
T
Qy
H
T
A
T
Qy = H
T
α, Qy ≥ 0. (5)
The constraint Qy ≥ 0 in this composite ALP still has
exponentially many (|S||A|) rows, but this can be re-
solved in several ways. For example, Qy ≥ 0 can be
reformulated as a more compact set using the ideas of
(Guestrin et al., 2003), but the resulting constraint set
still scales exponentially in the worst case. Another
way of handling this is to restrict Q to be non-negative
and replace the constraints with a stricter condition
y ≥ 0 (introducing yet another source of approxima-
tion error), leading to the following LP:
max r
T
Qy
H
T
A
T
Qy = H
T
α, y ≥ 0, (6)
or, equivalently, its dual:
min α
T
Hw
Q
T
AHw ≥ Q
T
r. (7)

Recall that the quality of the primal ALP (eq. 4)
is very sensitive to the choice of the primal basis
H. Similarly, the quality of policies produced by the
composite ALPs ((eq. 6) and (eq. 7)) greatly depends
on the choice of both H and Q. However, as we em-
pirically show below, the approach lends itself to an
intuitive algorithm for constructing small and com-
pact basis sets H and Q that yield high quality solu-
tions for the collision-avoidance domain.
Finally, let us also note that, while feasibility of the
primal ALP (eq. 4) can be ensured by simply adding
a constant h
0
= 1 to the basis H (de Farias and Roy,
2003), it is slightly more difficult to ensure the fea-
sibility of the composite ALP (eq. 6) (or the bound-
edness of (eq. 7)). Let us note that in practice, for
any primal basis H, boundedness and feasibility of
the composite ALPs can be ensured by constructing a
sufficiently large dual basis Q.
3 COLLISION-AVOIDANCE MDP
MODEL
We conducted experiments on several two-
dimensional collision-avoidance scenarios, and
the high-level results were consistent across the
domains. To ground the discussion, we report our
findings for a simplified model of the task of driving
on a two-way street. We model the problem as a
discrete-state MDP, by using a grid-world representa-
tion for the road, with the x-y positions of all cars as
the state features (the flat state space is given by their
cross-product).
In this domain, we are controlling one of the cars,
and the goal is to find a policy that minimizes the ag-
gregate probability of collisions with other cars. Each
uncontrolled vehicle is modeled to strictly adhere to
the right-hand-side driving convention. Within these
bounds, the vehicles stochastically change lanes while
drifting with varying speed in the direction of traffic.
This model can be naturally represented as a fac-
tored MDP. Indeed, the reward function lends itself
to a factored representation, because we only penal-
ize collisions with other cars, so the total reward can
be represented as a sum of local reward functions,
each one a function of the relative positions of the
controlled car and one of the uncontrolled cars.
1
The
transition function of the MDP also factors well, be-
cause each car moves mostly independently, so the
factored transition function can be represented as a
Bayesian network with each node depending on a
small number of world features.
1
We also experimented with other more interesting do-
mains and reward functions (e.g., roads with shoulders
where moving on a shoulder gave a small penalty); the high-
level results were consistent across such modifications.
4 BASIS SELECTION AND
EVALUATION
As mentioned earlier, ALP is very sensitive to the
choice of basis functions H and Q. Therefore, our
main goal is to design procedures for constructing pri-
mal (H) and dual (Q) basis sets that are compact, but
at the same time yield high-quality control policies.
The basic domain-independent idea behind our al-
gorithm is to use solutions to smaller MDPs as ba-
sis functions for larger problems. For our collision-
avoidance domains, we implemented this idea as fol-
lows. For every pair of objects, we constructed an
MDP with the original topology but without any other
objects, and then used these optimal value functions
as the primal basis H and the optimal occupation
measures as the dual basis Q for the original MDP.
We empirically evaluated this method on the car
domain from Section 3.
2
In our experiments, we var-
ied the geometry of the grid and the number of cars,
and for each configuration, we solved the correspond-
ing factored MDP using the ALP method described
above, and evaluated the resulting policies using a
Monte Carlo simulation (an exact evaluation is infea-
sible, due to the curse of dimensionality).
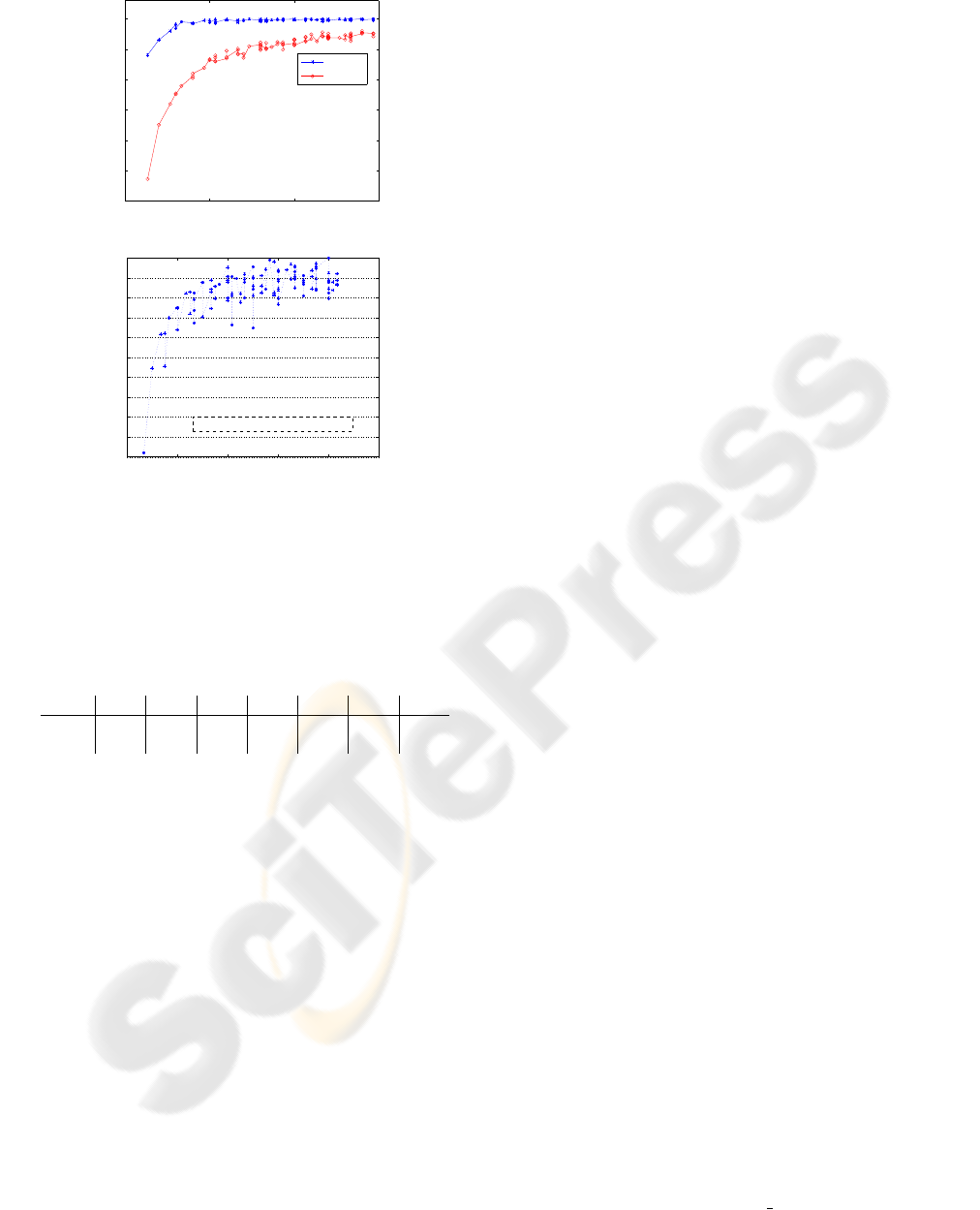
Figure 1a shows the value of the approximate poli-
cies computed in this manner, as a function of how
highly constrained the problem is (the ratio of the grid
area to the number of cars), with the average values
of random policies shown for comparison. The im-
portant question is, of course, how close our solution
is to the optimum. Unfortunately, for all but the most
trivial domains, computing the optimal solution is in-
feasible, so we cannot directly answer that question.
However, for our collision-avoidance domains, where
only negative rewards are obtained in collision states,
we can upper-bound the value of any policy by zero.
Using this upper bound on the quality of the optimal
solution, we can compute a lower bound on the rela-
tive quality of our approximation, which is shown in
Figure 1b. Notice that, for highly constrained prob-
lems (where optimal solutions have large negative
values), this lower bound can greatly underestimate
the quality of our solution, which explains low num-
bers in the left part of the graph. However, even given
this pessimistic view, our ALP method produced poli-
cies that were, on the average, no worse than 92% of
the optimum (relative to the optimal-random gap).
We also evaluated our approximate solution by its
relative gain in efficiency. In our experiments, the
sizes of the primal and dual basis sets grow quadrat-
ically with the number of cars, while the size of the
exact LP (eq. 1) grows exponentially. Table 1 illus-
trates the complexity reduction achieved by using the
composite ALP approach. In fact, the difference in
2
Other collision-avoidance domains had similar results.
0 5 10 15
−30
−25
−20
−15
−10
−5
0
constraint level (grid area / # cars)
Policy Value
ALP
random
(a)
0 2 4 6 8 10
0.5
0.55
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
Upper bound on true relative value
constraint level (grid area / # cars)
% Optimal
(b)
Figure 1: Absolute value (a) and lower bound on relative
value (b) of ALP solutions. The lower-bound estimate of
the ALP quality of ALP policies is, on average, 92% of op-
timum (relative to random policies).
Table 1: Problem size of exact LP (eq. 1) and compos-
ite ALP (eq. 7); former scales exponentially and the latter
quadratically with the number of cars.
# cars
3 4 5 6 7 8 9
ALP 3660 4960 6300 7680 9100 10560 12060
exact
4e+09 6e+12 1e+16 1e+19 2e+22 4e+25 6e+28
complexity between the flat LP and the ALP is so sig-
nificant that, the bottleneck was not the ALP itself,
but the smaller 2-car MDPs which were solved for the
exact solution to obtain the basis functions. Thus, an
interesting direction of future work is to experiment
with approximate solution techniques for the small
MDPs in the basis-generation phase.
5 CONCLUSIONS
We have analyzed the sequential decision-making
problem of vehicular collision avoidance in a sto-
chastic environment, modeled as a Markov deci-
sion process. Although classical MDP representa-
tions and solution techniques are not feasible for re-
alistic domains, we have empirically demonstrated
that collision-avoidance problems can be represented
compactly as factored MDPs and, moreover, that they
admit high-quality ALP solutions.
The core of our algorithm, the composite ALP
(eq. 7), relies on two basis sets – the primal basis H
and the dual basis Q. We have presented a simple
procedure for constructing these basis sets, where op-
timal solutions to scaled-down problems are used as
basis functions. This method attains an exponential
reduction in problem complexity (Table 1), while pro-
ducing policies that were very close to optimal (above
90% of the random-optimal gap, according to the pes-
simistic estimate of Figure 1b). Moreover, we believe
that this general basis-selection methodology is more
widely applicable and can be fruitfully used in other
domains that are similarly well-structured. An analy-
sis of this methodology for other problems is a direc-
tion of our ongoing and future work.
REFERENCES
Batavia, P. (1999). Driver Adaptive Lane Departure Warn-
ing Systems. PhD thesis, CMU.
Boutilier, C., Dearden, R., and Goldszmidt, M. (1995). Ex-
ploiting structure in policy construction. In IJCAI-95.
CARE (2004). Community road accident database.
http://europa.eu.int/comm/transport/care/.
de Farias, D. and Roy, B. V. (2004). On constraint sampling
in the linear programming approach to approximate
dynamic programming. Math. of OR, 29(3):462–478.
de Farias, D. P. and Roy, B. V. (2003). The linear program-
ming approach to approximate dynamic program-
ming. OR, 51(6).
Dolgov, D. A. and Durfee, E. H. (2005). Towards exploiting
duality in approximate linear programming for MDPs.
In AAAI-05. To appear.
Guestrin, C., Koller, D., Parr, R., and Venkataraman, S.
(2003). Efficient solution algorithms for factored
MDPs. JAIR, 19:399–468.
ITS (2003). US Department of Transportation press release.
http://www.its.dot.gov/press/fhw2003.htm.
Koller, D. and Parr, R. (1999). Computing factored value
functions for policies in structured MDPs. In IJCAI.
NHTSA (2003). Traffic safety facts. Report DOT HS 809
767, http://www-nrd.nhtsa.dot.gov.
Patrascu, R., Poupart, P., Schuurmans, D., Boutilier,
C., and Guestrin, C. (2002). Greedy linear
value-approximation for factored Markov decision
processes. In AAAI-02, pages 285–291.
Poupart, P., Boutilier, C., Patrascu, R., and Schuurmans, D.
(2002). Piecewise linear value function approximation
for factored MDPs. In AAAI-02, pages 292–299.
Puterman, M. L. (1994). Markov Decision Processes. John
Wiley & Sons, New York.
Schweitzer, P. and Seidmann, A. (1985). Generalized
polynomial approximations in Markovian decision
processes. J. of Math. Analysis and App., 110:568 582.
Toyota (2004). Toyota safety: Toward re-
alizing zero fatalities and accidents.
http://www.toyota.co.jp/en/safety
presen/index.html.
