
A NEW METHOD FOR WEIGHT UPDATING IN FUZZY
COGNITIVE MAPS USING SYSTEM FEEDBACK
Theodore L. Kottas, Yiannis S. Boutalis
Department of Electrical and Computer Engineering, Democritus University of Thrace, Xanthi, Hellas (Greece)
Manolis A. Christodoulou
Department of Electronic and Computer Engineering, Technical University of Crete, Chania, Hellas
Keywords: Fuzzy Cognitive Maps, Hebbian rule, State feedback, Weight Updating.
Abstract: Fuzzy Cognitive Maps (FCMs) have found many applications in social -financial -political problems. In this
paper we propose a method of FCM operation, which can be used to represent and control any real system,
including traditional electro-mechanical systems. In the proposed approach the FCM reaches its equilibrium
point using direct feedback from the node values of the real system and the limitations imposed by the
control objectives for the node values of the system. The experts’ knowledge, which is represented in the
weights of the nodes’ interconnections, undergoes a continuous on-line adaptation based on feedback from
the real system. An algorithm for weight updating is proposed, which is based on system feedback and
which includes specially designed matrices that lead the FCM and consequently the real system associated
with it in a balanced equilibrium state. The proposed methodology is tested by simulating the operation of a
hydro-electric plant.
1 INTRODUCTION
Some problems of electrical and mechanical
engineering are placed in the fuzzy part of science
and they have been studied thoroughly enough the
last years from a good many of scientists. A large
number of different methods have occasionally been
used in order to work out this kind of problems. The
scientific community was placed under the
obligation of giving solutions to problems the
settlement of which seemed rather difficult the years
before.
Fuzzy Cognitive Maps (FCM) can model
dynamical complex systems that change with time
following nonlinear laws (Kosko, 1992). FCMs use
a symbolic representation for the description and
modeling of the system. In order to illustrate
different aspects in the behavior of the system, a
fuzzy cognitive map is consisted of nodes with each
node representing a characteristic of the system.
These nodes interact with each other showing the
dynamics of the system in study. An FCM integrates
the accumulated experience and knowledge on the
operation of the system, as a result of the method by
which it is constructed, i.e., using human experts
who know the operation of system and its behavior.
Fuzzy cognitive maps have already been used to
model behavioral systems in many different
scientific areas. For example, in political science
(Schneider, 1998), fuzzy cognitive maps were used
to represent social scientific knowledge and describe
decision-making methods (Kottas, 2003), (Zhang,
1989), (Georgopoulou, 2001). Kosko enhanced the
power of cognitive maps considering fuzzy values
for their nodes and fuzzy degrees of
interrelationships between nodes (Kosko, 1992),
(Kosko, 1997). After this pioneering work, fuzzy
cognitive maps attracted the attention of scientists in
many fields and they have been used in a variety of
different scientific problems. Fuzzy cognitive maps
have been used for planning and making decisions in
the field of international relations and political
developments (Kottas, 2003) and to model the
behavior and reactions of virtual worlds. FCMs have
been proposed as a generic system for decision
analysis (Zhang, 1989), (Zhang, 1992) and as
coordinator of distributed cooperative agents.
One open issue related to FCMs, is their
operation in close cooperation with the real system
they describe. This in turn implies that such an on-
202
L. Kottas T., S. Boutalis Y. and A. Christodoulou M. (2005).
A NEW METHOD FOR WEIGHT UPDATING IN FUZZY COGNITIVE MAPS USING SYSTEM FEEDBACK.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics, pages 202-209
DOI: 10.5220/0001163502020209
Copyright
c
SciTePress

line interaction with the real system might require
changes in the weight interconnections, which
reflect the experts’ knowledge about the node
interdependence. This knowledge might not be
entirely correct or perhaps, the system has
undergone to changes during its operation.
In this paper an FCM operation method is
proposed, which is in close interaction with the
system it represents. The FCM nodes are divided in
control and reference nodes, where control nodes
represent control variables of the system and
reference nodes represent either variables with
constant values or variables with desired (goal)
values. In the proposed approach, the FCM reaches
its equilibrium point using direct feedback from the
node values of the real system and the limitations
imposed by the reference nodes. The
interconnections weights are on-line adjusted during
this operation by using an extended Hebbian
updating law, which uses the system feedback and
employs two specially defined collateral matrices,
which help the FCM to adjust its weights and reach
an equilibrium point in a more realistic and balanced
way.
The paper is organized as follows: Section 2
gives a short description of FCMs and their way of
operation. Section 3 introduces the proposed
combined operation of the FCM and the real system
and presents the relevant Hebbian rule to update
interconnections weights. The proposed weight
updating method is extended in Section 3.1 to
include the specially defined placement and
calibration matrices. Section 4 gives a simulation
study of a hydro-electric power plant, where a
comparative study of the proposed method versus
the traditional approach in reaching equilibrium
points in FCM is made. The final conclusions are
given in Section 5.
2 FUZZY COGNITIVE MAPS
REPRESENTATION AND
DEVELOPMENT
Fuzzy cognitive maps approach is a hybrid modeling
methodology, exploiting characteristics of both
fuzzy logic and neural networks theories and it may
play an important role in the development of
intelligent manufacturing systems. The utilization of
existing knowledge and experience on the operation
of complex systems is the core of this modeling
approach. Experts develop fuzzy cognitive maps and
they transform their knowledge in a dynamic
cognitive map (Miao, 2001).
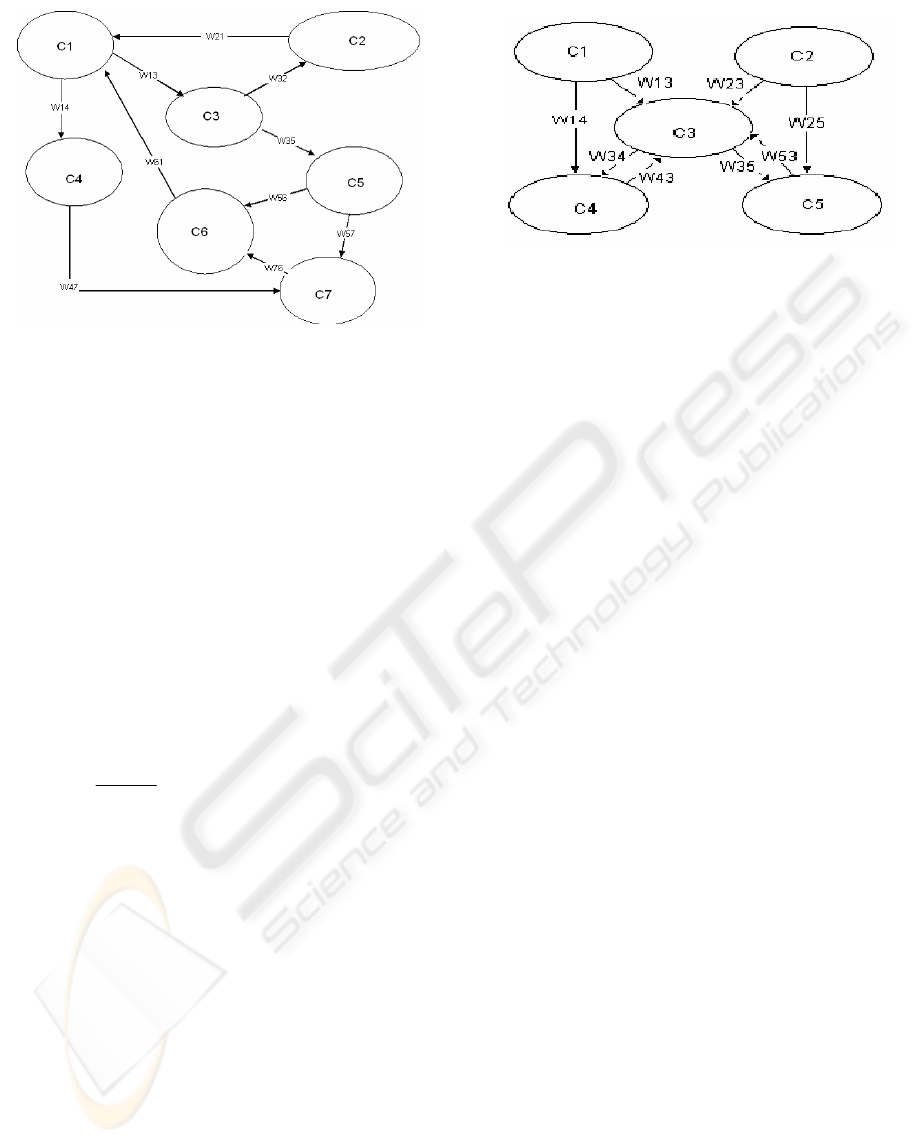
The graphical illustration of FCM is a signed
directed graph with feedback, consisting of nodes
and weighted interconnections. Nodes of the graph
stand for the nodes that are used to describe the
behavior of the system and they are connected by
signed and weighted arcs representing the causal
relationships that exist among nodes (Fig. 1). Each
node represents a characteristic of the system. In
general it stands for states, variables, events, actions,
goals, values, trends of the system which is modeled
as an FCM (Jang, 1995). Each node is
characterized by a number A
i
, which represents its
value and it results from the transformation of the
real value of the system's variable, for which this
node stands, in the interval [0, 1]. It must be
mentioned that all the values in the graph are fuzzy,
and so weights of the interconnections belong to the
interval [-1, 1]. With the graphical representation of
the behavioral model of the system, it becomes clear
which node of the system influences other nodes and
in which degree.
The most essential part in modeling a system
using FCMs, is the development of the fuzzy
cognitive map itself, the determination of the nodes
that best describe the system, the direction and the
grade of causality between nodes. The selection of
the different factors of the system, which must be
presented in the map, will be the result of a close-up
on system's operation behavior as been acquired by
experts. Causality is another important part in the
FCM design, it indicates whether a change in one
variable causes change in another, and it must
include the possible hidden causality that it could
exist between several nodes. The most important
element in describing the system is the
determination of which node influences which other
and in what degree. There are three possible types of
causal relationships among nodes that express the
type of influence from one node to the others. The
weight of the interconnection between node C
i
and
node C
j
denoted by W
ij
, could be positive (W
ij
> 0)
for positive causality or negative (W
ij
< 0) for
negative causality or there is no relationship between
node C
i
, and node C
j
, thus W
ij
= 0. The causal
knowledge of the dynamic behavior of the system
is stored in the structure of the map and in the
interconnections that summarize the correlation
between cause and effect. The value of each node is
influenced by the values of the connected nodes with
the corresponding causal weights and by its previous
value. So, the value A
j
for each node C
j
is calculated
by the following rule, (Jang, 1995):
A NEW METHOD FOR WEIGHT UPDATING IN FUZZY COGNITIVE MAPS USING SYSTEM FEEDBACK
203
where
s
j
A
, is the value of node
j
C at step s,
1s
i
A
−
is the value of node
i
C , at step s-1,
1
s
j
A
−
is the value
of node
j
C at step s-1, and
ij
W is the weight of the
interconnection between
i
C and
j
C
, and f is a
squashing function.
Squashing functions:
1) f = tanh(x) maps the nodes values in [-1 , 1]
2)
cx
e
f
−
+
=
1
1
by using c=1 we convert the
nodes values in [0 , 1]. It also called sigmoid
function. The second function is the most common
function which is used in FCM’s.
3 THE NEW METHOD FOR
WEIGHT UPDATING
In this section we will analyze the proposed method
of updating the interconnections weights of FCM
taking into account feedback node values from the
real system. Using the updated weights the FCM
reaches a new equilibrium point by means of
equation (1). Some of the new node values can be
applied as control values to the real system. One
commonly used technique for updating weights in
FCMs is the Hebbian updating rule (Kosko, 1986
a,b), (Papageorgiou, 2004). In our approach the
updating is made by using the conventional Hebbian
rule, which however, uses measurements from the
node values taken from the real system. This way
the updating of the weights reflects real changes that
have to be made in our knowledge about the system,
which is represented by the interconnection weights.
This situation is more apparent in cases where there
exist steady value nodes, which, in the real system,
are not affected by the values of the other nodes. In
this case, if the FCM convergence equation (1) is
left to operate with weight adjustments that do not
take into account the steady node values fact, then
the equilibrium point will give node values for the
above mentioned nodes, which might be different
than the steady values, which in turn implies an
unrealistic point of operation for our system.
Let us, for example, analyze an FCM having one
or more nodes with constant values. This means that
no human action can intervene, in a mechanic way
with this value. Suppose that in the FCM of Fig. 2
nodes C1 and C2 cannot change their values. The
values of these nodes derive from the system that is
examined. The table of interconnection weights for
this system is:
00 13 14 0
00 23 0 25
00 0 34 0
00 43 0 0
00 53 0 0
WW
WW
W
W
W
W
=
⎡
⎤
⎢
⎥
⎢
⎥
⎢
⎥
⎢
⎥
⎢
⎥
⎣
⎦
We see that columns 1 and 2 that concern nodes C1
and C2 are zero. When applying equation (1) for
node value updating we have to consider the steady
values of nodes C1 and C2 by using a companion
adjusting equation. Thus, equation (1) is now
replaced by the following two equations:
1,
11
N
iij
sss
ij
jij
Af AWA
=≠
−−
=+
∑
⎛⎞
⎜⎟
⎜⎟
⎝⎠
(1)
1,
,1,1,
N
iij
s FCM s FCM s FCM
ij
jij
Af AWA
=≠
−−
=+
∑
⎛⎞
⎜⎟
⎜⎟
⎝⎠
(2)
And for the steady state nodes the correction
equation is:
Figure 2: FCM with steady stea nodes
Figure 1: A simple fuzzy cognitive map
ICINCO 2005 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
204

,
s
FCM system
jj
AA=
(3)
where
s
ystem
j
A is the node’s value, derived from the
real system. These values are either measured on-
line or are known beforehand as the steady nodes
values of the above example. In order to drive the
FCM in a realistic representation of the system and
its control actions we have to update the
interconnection weights using these measured node
values from the real system. Based on the updated
weights, equations (1) and (2) will produce a new set
of node values which represent the control actions
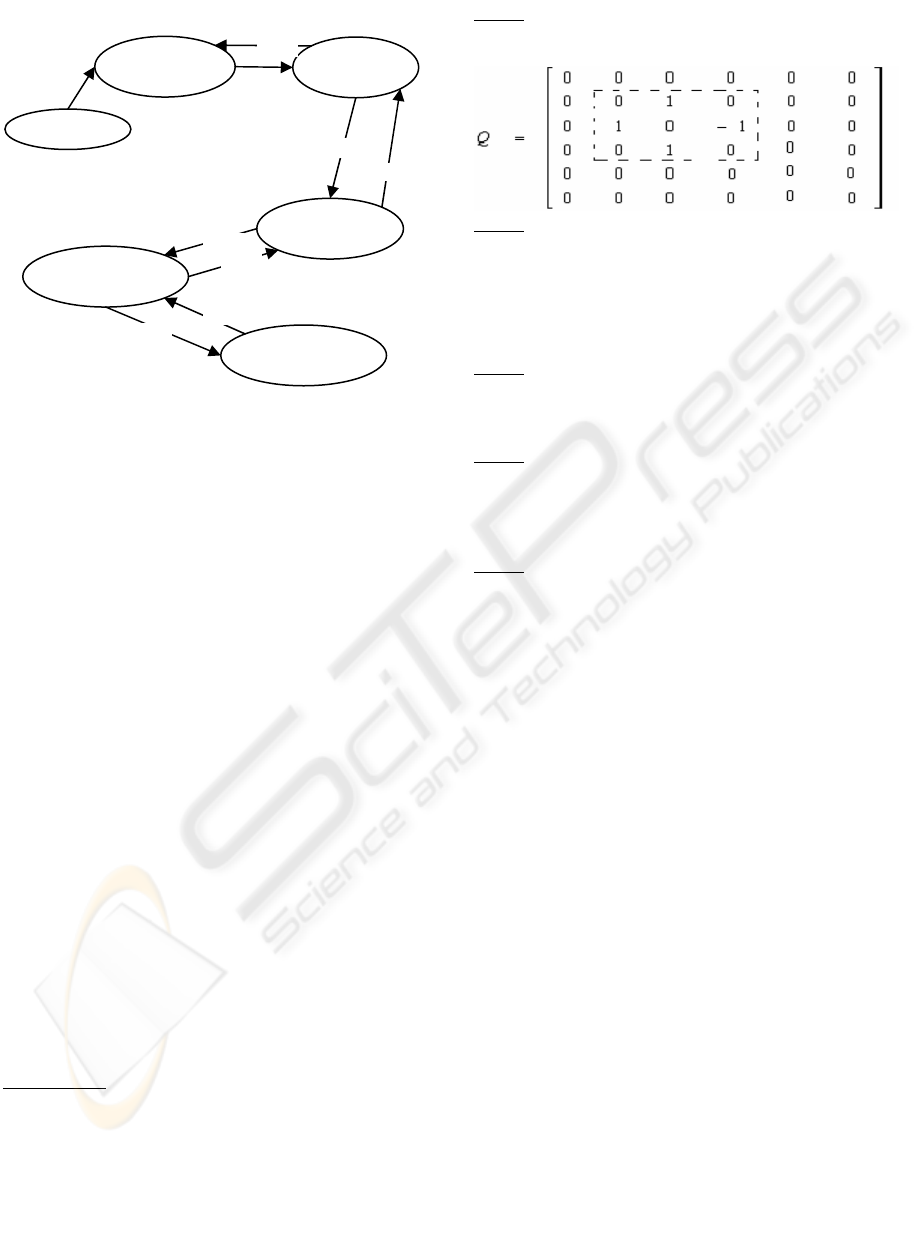
applied to the real system. The procedure, which is
depicted in Fig. 3, is repetitively applied during the
operation of the system. The weights that are non
zero are renewed according to the Hebbian rule:
,,
1,
1
1
sFCM sFCM
ij
ij
N
iij
AWA
system
j
A
e
p
=≠
⎛⎞
⎜⎟
−+
⎜⎟
⎝⎠
+
=−
∑
(4)
1,
(1 )
kk sFCM
ij ij
i
WW appA
−
+−=
(5)
where k is the number of iteration and a is the
learning rate (usually
=0.1).
The procedure described in Fig. 3 uses
repetitively equations (2), (3), (4) and (5) to provide
with an FCM, which totally corresponds and
cooperates with the real system. The control nodes
of the system (nodes C3, C4 and C5 of Fig. 2) are
now taking values which take into account the
steady node values (C1 and C2) and the weight
interconnections updated values. In the next section
we extend the weight updating equations to include
two collateral matrices, the one been called
placement matrix and the other calibration matrix.
We will see that by including these two matrices in
the weight updating equations the FCM results in
more balanced and smooth variations of its node
values.
3.1 The Extended Weight Updating
Law
The motivation for developing this new extended
updating law was to find a flexible and credible way
to drive one or more elements (nodes) of a system in
a desired position (value). The proposed extended
method includes two auxiliary collateral matrices Q
and R. Matrix Q incorporates experts’ opinion about
the nodes that should be positively or negatively
affected so that the driven node reaches the desired
value, provided that the node interdependences are
determined by weight matrix W. Matrix R contains
elements that help FCM to converge to the desired
node values by altering the connected to them nodes
in a balanced way, avoiding saturation in the nodes
having already large values. The two matrices Q and
R can be included in the weight updating law with
system feedback, described in the previous section,
leading thus to a new FCM representing the system
in amore desirable and realistic way.
The first matrix, called placement matrix, Q, has
the same dimensions with matrix W. Each element
Q
ij
of the placement matrix Q can take one of the
values {-1, 0, 1}, which reflect the way by which
node C
i
affects node C
j
and determines the weights
that should be updated in order to influence the
change of node value C
j
. A possible formation of
matrix Q is the following: If one wants to drive node
C
j
from value
1
s
j
A
−
to a bigger value
s
j
A
, that is
1
s
s
jj
A
A
−
> then:
1010,00,
ji ij ji ij ji ij
Q ifW Q ifW Q ifW
=
>=− <= =
In the opposite situations, when one wants to drive
node C
j
from value
1
s
j
A
−
to a smaller value
s
j
A
, that
is
1
s
s
jj
A
A
−
< then:
1010,00,
ji ij ji ij ji ij
Q ifW Q ifW Q ifW
=
<=− >= =
The use of this matrix will be clearer in section 4.
Incorporation of matrix Q in the weight updating
equations is performed as follows:
,,
1,
1
1
sFCM sFCM
ij
ij
N
iij
AWA
system
j
A
e
p
=≠
⎛⎞
⎜⎟
−+
⎜⎟
⎝⎠
+
=−
∑
1,
*( (1 )
kk sFCM
i
ij ij ij
WW Qap pA
−
=+ − (6)
The calibration matrix R has the same dimension
with matrix W. Each point R
ij
of the calibration
matrix R is computed by the following formula:
FCM SYSTEM
Feedbac
k
(
A
syste
m
)
Control actions
Figure 3: Control structure
A
S,FCM
desired
nodes values
ex
p
erts
A NEW METHOD FOR WEIGHT UPDATING IN FUZZY COGNITIVE MAPS USING SYSTEM FEEDBACK
205

1
*
in
ij
i
ij
ij
W
n
W
R
=
=
=
∑
if W
ij
≠ 0 and 0
ij
R = if W
ij
=0
(7)
where n is the learning rate and is defined in the
interval [0.01, 0.1].
It can be seen that for the computation of each
element of R only the elements of each column of
matrix W contribute. This is related to the fact that
each column j of matrix W contains weight
interconnection values from the nodes which affect
node j. When matrix R is incorporated in the weight
updating law, the new weights lead the FCM to a
more balanced equilibrium point and prevent nodes,
which already have large values, to saturate. At the
same time matrix R also causes an enhancement to
the values of nodes which have small values and
which, of course affect the nodes to be changed.
Incorporation of matrix R in the weight updating
equations is performed as follows:
,,
1,
1
1
sFCM sFCM
ij
ij
N
iij
AWA
system
j
A
e
p
=≠
⎛⎞
⎜⎟
−+
⎜⎟
⎝⎠
+
=−
∑
1,
*( (1 )
kk sFCM
i
ij ij
WW ap pAG
−
=+ −
(8)
where :
*
ij ij
GQ R=
(9)
If C
j
node must be in a desired value then
A
j
system
= A
j
desired
, so that equation 4 for the nodes in
a desired value becomes:
The complete algorithm which uses system
feedback, the desired node values and the collateral
matrices Q, R is shown in Fig. 4.
4 SYSTEM SIMULATION STUDY
To demonstrate the method we choose a simple
mechanical problem of a hydroelectric power station
shown in Fig. 5. The FCM representation of the
system is shown in Fig. 6. We want to regulate the
flow in the two Hydro-generators (1 and 2). In order
to achieve this we will use the proposed method, to
control the system and to regulate the values of the
report and control nodes.
The system has one steady value node [River -
reference node1], three control nodes [Valve 2 -
node 4, Valve 3 - node 6 and Valve 1 – node 2] and
two simple operation nodes [Tank 1 - node 3, Tank 2
- node 5]. One or more of nodes 2, 3, 4, 5 and 6
values have to be regulated so that hydro-generators
1 and 2 can receive the desired water flow values.
Based on experts knowledge regarding the
mechanics of the system a possible weight matrix W
is the following:
00.6 0 0 0 0
0 0 0.76 0 0 0
00.81 0 0.38 0 0
0 0 0.6 0 0.8 0
0 0 0 0 .7 0 0 .6
0 0 0 0 0.42 0
W
⎡
⎤
−
⎢
⎥
⎢
⎥
⎢
⎥
⎢
⎥
=
−
⎢
⎥
⎢
⎥
⎢
⎥
⎢
⎥
−
⎣
⎦
which, after repetitively applying equations (2) and
(3) will give the following equilibrium values for
,,
1,
1
1
sFCM sFCM
ij
ij
N
iij
desired
j
AWA
e
pA
=≠
⎛⎞
⎜⎟
−+
⎜⎟
⎝⎠
+
=−
∑
(10)
Figure 4: Schematic description of the
p
roposed
algorithm
Define the desired
nodes values acquire
the initial W matrix
and compute Q matrix
Execute eq. (2) and (3)
to find equilibrium
points for the FCM
nodes.
Send the control nodes
values from the FCM
to the real system.
Calculate the R matrix
and update weights
according to eq. (4),
(8) and (10)
Take the nodes values
from the real s
y
stem.
Step 5
Step 4
Step 3
A
i
S,FCM
= desired
node value
YES
Step 1
Step 2
A
i
S,FCM
=A
i
S-1,FCM
N
O
N
O
STOP
YES
ICINCO 2005 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
206

the nodes of the FCM. It should be mentioned that in
this case equation (3) applies only for the steady
node 1 value, which in our example is 0.6.
0.6 0.658 0.65 0.8 0.75 0.7A
⎡⎤
=
⎣⎦
Since we are not absolutely confident about the
experts’ opinion on matrix W, or we want to
anticipate any physical changes occurred in the
system during its operation we proceed in weight
updating according to the procedure described in
Fig. 3 using equations (2), (3), (4) and (5). It should
be noted that, so far, the only desired node value in
Fig. 3 is the steady node 1 (river). The improved
weight matrix becomes:
00.95390000
0 0 0.7592 0 0 0
0 0.6457 0 0.0729 0 0
0 0 0.598 0 0.7999 0
0 0 0 0.3519 0 0.2959
0 0 0 0 0.4201 0
imp
W
⎡⎤
−
⎢⎥
⎢⎥
⎢⎥
⎢⎥
=
−
⎢⎥
⎢⎥
⎢⎥
⎢⎥
−
⎣⎦
which, after applying equations (2) and (3), gives the
following FCM equilibrium node values.
0.6 0.5592 0.6498 0.7402 0.7362 0.7183A
⎡⎤
=
⎣⎦
Case study 1
We now want to drive node 3 (tank 1) and node
5 (tank 2) to a specific value. We want to do that
because the water height in these tanks will affect
the water flow in Hydrogenerators 1 and 2, which in
turn influences the produced power. In this approach
we will use matrices Q and R and we will proceed
following all the steps of Fig. 4.
Step 1
We assume that we desire the following values:
node (3) = 0.652, node (5) = 0.7398, keeping always
in mind that node 1 (river) has always a steady value
(0.6). Let also the initial weight matrix W equals
matrix W
imp
computed earlier.
We calculate matrix Q according to section 3.1.
The two sub-matrices of Q, enclosed by dotted lines,
refer to nodes 3 and 5. The right sub-matrix refers to
node 5 and declares that in order to drive node 5 in a
specific value we have to update the elements of the
W matrix which correspond to the points of the right
dotted sub-matrix. The same rationale applies for the
left sub-matrix, which now refers to node 3. The
centre of each sub-matrix referring to the C
i
node
must be the element Q
ii
. If we don’t want to change
C
i
node then the corresponding sub-matrix is set to
zero. For example if we want to drive only node 3
the Q matrix is:
Step 2
Now we execute step 2 of Fig. 4 to calculate
equilibrium point for the FCM, which is:
0.6 0.5592 0.6498 0.7402 0.7362 0.7183A
⎡
⎤
=
⎣
⎦
We must now correct node (3) and node (5) and
drive them to 0.652 and 0.7398 respectively.
Step 3
We apply the FCM control nodes values to the
real system
Step 4
We get the new node values from the real
system. We assume that the real system instantly
responds to the values imposed by step 3.
Step 5
Calculate calibration matrix R according to
equation (7):
00.16760000
0 0 0.179 0 0 0
0 0.247 0 0.58 0 0
0 0 0.226 0 0.152 0
0 0 00.1201
00 0 00.290
R
⎡
⎤
⎢
⎥
⎢
⎥
⎢
⎥
⎢
⎥
⎢
⎥
⎢
⎥
⎢
⎥
⎢
⎥
⎣
⎦
=
Figure 5: Hydroelectric station
A NEW METHOD FOR WEIGHT UPDATING IN FUZZY COGNITIVE MAPS USING SYSTEM FEEDBACK
207
Find the new W matrix that arises by using
equations (4), (8) and (10). Go to step 2.
After 12 iterations we will find that the FCM
accurately describes the operation of the real system.
The final W matrix is:
0 0.9539 0 0 0 0
0 0 0.7696 0 0 0
0 0.4148 0 0.0914 0 0
0 0 0.6138 0 0.8081 0
0 0 0 0.3818 0 0.3431
0 0 0 0 0.4121 0
W
final
⎡⎤
−
⎢⎥
⎢⎥
⎢⎥
⎢⎥
=
−
⎢⎥
⎢⎥
⎢⎥
⎢⎥
−
⎣⎦
and A vector is:
0.6 0.5655 0.652 0.7485 0.7398 0.7273A
⎡⎤
=
⎣⎦
if we don’t use matrices Q and R by executing the
case study 1 from step 2 to step 5 we will conclude
to the desired values for nodes 3 and 5 after 45
iterations. The other node values are however
different since W matrix is in this case different than
the one calculated above.
Case study 2
To make the use of the two matrices clearer we
give the following example. Suppose we want to
drive only node 3 (tank 1) in a specific value:
node 3 = 0.76. We keep in mind that node 1 is a
steady value node (0.6). Let also the initial weight
matrix W equals matrix W
final
computed above.
Step 1
Calculate placement matrix Q according to
Section 3.1:
Step 2
Now we execute step 2 of Fig. 4 to calculate
equilibrium points for the FCM, which is:
0.6 0.5655 0.652 0.7485 0.7398 0.7273A
⎡
⎤
=
⎣
⎦
We must now correct node (3) and drive it to 0.76.
Step 3
We apply the FCM control nodes values ro the
real system
Step 4
We get the new node values from the real
system. We assume that the real system instantly
responds to the values imposed by step 3.
Step 5
Calculate calibration matrix R according to
equation (7):
00.143 0 0 0 0
000.1790 00
00.31 0 0.517 0 0
0 0 0.225 0 0.15 0
00 00.12401
00 0 00.2960
R
⎡
⎤
⎢
⎥
⎢
⎥
⎢
⎥
⎢
⎥
=
⎢
⎥
⎢
⎥
⎢
⎥
⎢
⎥
⎣
⎦
Find the new W matrix that arises by using
equations (4), (8) and (10). Go to step 2.
After 16 iterations we find that matrix W and
vector A are:
0 0.9539 0 0 0 0
0 0 0.7652 0 0 0
0 0.6 0 0.2642 0 0
0 0 0.5472 0 0.8081 0
0 0 0 0.3818 0 0.3431
0 0 0 0 0.4121 0
W
⎡
⎤
−
⎢
⎥
⎢
⎥
⎢
⎥
−
⎢
⎥
=
−
⎢
⎥
⎢
⎥
⎢
⎥
⎢
⎥
−
⎣
⎦
0.60.62430.760.68080.72660.7273A
⎡
⎤
=
⎣
⎦
if we don’t use matrices Q and R by executing the
case study 2 from step 2 to step 5 we will conclude
after 34 iterations to:
00.5674 0 0 0 0
0 0 0.9236 0 0 0
0 0.8834 0 0.0423 0 0
0 0 0.4220 0 0.8962 0
0 0 0 0.2455 0 0.3431
0 0 0 0 0.3242 0
W
⎡
⎤
−
⎢
⎥
⎢
⎥
⎢
⎥
−
⎢
⎥
=
−
⎢
⎥
⎢
⎥
⎢
⎥
⎢
⎥
−
⎣
⎦
Tank2 (5)
Valve 1 (2)
Valve 2 (4)
Tank 1 (3)
Valve 3 (6)
W12
W32
W34
W43
W23
W45
W54
W56
W65
Figure 6: A Fuzzy cognitive map representing the
hydroelectric factory of Fig. 5
ICINCO 2005 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
208

and
0.6 0.7459 0.76 0.7019 0.76 0.7290A
⎡⎤
=
⎣⎦
It can be observed that, without matrices Q and
R, the FCM drives the system to a different
equilibrium point than the equilibrium reached using
Q and R matrices. It is apparent that when the
matrices are not used, in the new equilibrium points
more node values are different than their initial
values. On the contrary, when Q and R matrices are
used only control nodes 2 and 4 are different than
their initial equilibrium values. This fact is mainly
due to matrix Q. In large systems which are difficult
to change their operation we don’t want main
characteristics to be changed with no reason. Less
changes we manage, in main characteristics (see
valves), more flexible system we make. The effect
of matrix R is made more apparent from the weight
changes and the node value changes in the
equilibrium points. It can be observed that by using
matrix R the changes in the control node values are
made in a more balanced way because in this case
nodes 2 and 4, which affect node 3, change
proportionally. In respect to the internal operation of
the algorithm, this is connected to the fact that the
weights are not allowed to reach their saturation
values because their change is not allowed to be
proportional to their previous value (see for example
W
32
and W
34
).
5 CONCLUSIONS
In this paper a new method for weight updating in
FCMs using system feedback is proposed. So far,
the existing approaches were using the simple
method of weight updating without taking into
account the feedback from the real system. The
diversity of the proposed method lies in the fact that
FCM reaches its equilibrium point using direct
feedback from the node values of the real system
and the limitations imposed by the reference nodes,
which nodes represents either variables with
constant values or variables with desired (goal)
values. The weights are on-line adjusted during this
operation by using an extended Hebbian updating
law, which uses the system feedback and employs
two specially defined collateral matrices, which help
the FCM to adjust its weights and reach an
equilibrium point in a more realistic and balanced
way. Another benefit of using these matrices, which
is drawn from experimental results, is the faster
convergence of the weight updating algorithm.
REFERENCES
Georgopoulou V.C., Malandraki G.A., Stylios C.D., 2001.
“A fuzzy cognitive map approach to differential
diagnosis of specific language impairment”. Artificial
Intelligence in Medicine 679, pp. 1-18.
Jang J., Sun C., 1995. “Neuro-Fuzzy Modelling and
Control”, Proceedings of the IEEE, vol 83, no 3, pp.
378-40.
Kosko B., 1986, “Fuzzy Cognitive Maps”, International
Journal of Man-Machine Studies, pp. 65-75, January
Kosko B., 1986, “Differential Hebbian Learning”,
Proceedings American Institute of Physics; Neural
Networks for Computing, pp. 277-282, April
Kosko B., 1992. “Neural Networks and Fuzzy Systems”,
Prentice-Hall, Englewood Cliffs, NJ.
Kosko B., 1997.“Fuzzy Engineering “,Prentice-Hall, NU.,
Kottas T. L., Boutalis Y. S., Devedzic G., Mertzios
B.G.,2003. “A new method for reaching equilibrium
points in Fuzzy Cognitive Maps”, Proceedings of 2
nd
International IEEE Conference of Intelligent Systems,
pp. 53-60.
Miao Y., Liu Z., Siew C., Miao C., 2001. “Dynamical
Cogntive Network-an Extension of Fuzzy Cognitive
Map”, IEEE transactions on fuzzy systems , vol 9 , no
5, pp. 760-770.
Papageorgiou E.I., Stylios C.D., Groumpos P.P., 2004.
“Active Hebbian learning algorithm to train fuzzy
cognitive maps” International Journal of Approximate
Reasoning 37, pp.219-249.
Satur R., Liu Z., 1999. “A Contextual Cognitive Map
Framework for Geographic Information Systems”,
IEEE transactions on fuzzy systems, vol 7, no 5, pp.
481-494.
Schneider M., Shnaider E., Kandel A., Chew G., 1998.
“Automatic Construction of FCMs”, Fuzzy Sets and
Systems, 93, pp. 161-172.
Tsadiras A., Margaritis K., 1997 . “Cognitive Mapping
and Certainty Neuron Cognitive Maps”, Information
Sciences, 101, pp. 109-13.
Tsadiras A., Margaritis K., 1999. “An experimental study
of the dynamics of the certainty neuron fuzzy cognitive
maps”, Neurocomputing , 24 , pp. 95-116.
Zhang W.,Chen S. Bezdek J. , 1989. “ Pool2: A Generic
System for Cognitive Map Development and Decision
Analysis “, IEEE Transactions on Systems, Man, and
Cybernetics, vol 19,no 1, pp. 31-39.
Zhang W., Chen S., Wang W., King R., 1992. “A
Cognitive Map Based Approach to the Coordination of
Distributed Cooperative Agents”, IEEE Transactions
on Systems, Man, and Cybernetics, vol. 22, no 1,
pp. 103-114.
A NEW METHOD FOR WEIGHT UPDATING IN FUZZY COGNITIVE MAPS USING SYSTEM FEEDBACK
209
