
COMPONENT RUNTIME SELF-ADAPTATION IN ROBOTICS
Daniel Hernandez, Antonio Dominguez, Oscar Deniz and Jorge Cabrera
IUSIANI - ULPGC
Campus de Tafira, 350017, Las Palmas de Gran Canaria, Spain
Keywords:
Robotic systems, self-adaptive software components.
Abstract:
Mobile robotic applications have to deal with limited resources and variable execution conditions that must be
appropriately managed in order to keep an acceptable system behavior. This requires the implementation of
runtime adaptation mechanisms that monitor continuously system state and module the resulting performance
as a function of the available resources. As we consider that these adaptation mechanisms should be offered as
a facility to robotic application programmers, we have integrated them inside CoolBOT, a component oriented
framework for programming robotic systems. CoolBOT contributes to reduce the programming effort, pro-
moting code reuse, while the adaptation scheme allows for more robust applications with an extended range
of operation. In this paper we also present a demonstrator that outlines the benefits of using the proposed
approach in the development of real robotic applications.
1 INTRODUCTION
The management of shared resources is an important
subject of research in robotic and sensor-effector sys-
tems. Some authors (Murphy, 2000)(Kortenkamp and
Schultz, 1999), coincide in the necessity of includ-
ing the adaptive aspect in order to build really robust
systems. This is specially important in mobile ro-
botic systems, configured as tactical multi-objective
designs which are often affected by the shortage of
shared resources (Jones, 1997). When strict guar-
anties of bounded reaction times and rigid operation
frequencies are needed, hard real-time techniques are
the most commonly adopted solution. However, there
are many contexts of application in robotics where
those strict guaranties can be relaxed to a certain ex-
tent, and a soft real-time adaptive control scheme may
in our opinion represent a more convenient solution.
On the other hand, in the context of software
development for robotic applications, the complex-
ity of programming and maintenance (Kortenkamp
and Schultz, 1999) has promoted the proposal of
architectures (Coste-Maniere and Simmons, 2000)
and frameworks (Fleury et al., 1997) (Schlegel and
W
¨
orz, 1999). Following this tendency we have pre-
sented CoolBOT (Dom
´
ınguez-Brito et al., 2004), a
component-based software framework aimed at facili-
tating the development of robotic systems without im-
posing any specific architecture.
The combination of the adaptive control and
component-based software has been considered, out-
side mobile robotics, by some authors (Garlan et al.,
2004) (Oreizy et al., 1999) with promising results.
There are also some examples of adaptive robotic ar-
chitectures (Musliner et al., 1999), but not for soft
real-time frameworks. We consider that CoolBot
could clearly benefit from the integration of run-time
self-adaptive resources, constituting a more useful
tool for robotic application developers.
This paper is organized in the following sections:
brief outline of CoolBOT (2), adaptation mechanisms
(3), experiments with a real mobile robot demonstra-
tor (4) and conclusions (5).
2 CoolBOT
CoolBOT (Dom
´
ınguez-Brito et al., 2004) is a
component-oriented framework that allows designing
software in terms of composition and integration of
software components. In CoolBOT, components are
active entities that act on their own initiative, carry-
ing out their own specific tasks, running in parallel or
concurrently, and are normally weakly coupled. More
399
Hernandez D., Dominguez A., Deniz O. and Cabrera J. (2005).
COMPONENT RUNTIME SELF-ADAPTATION IN ROBOTICS.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 399-402
DOI: 10.5220/0001166403990402
Copyright
c
SciTePress

specifically, components are modelled as Port Au-
tomata (Steenstrup et al., 1983)(Stewart et al., 1997),
a concept that establishes a clear distinction between
the internal functionality of a component, an automa-
ton, and its external interface, conformed by input and
output port connections (port connections).
The framework introduces two kinds of facilities
in order to support monitoring and control of compo-
nents: observable variables, which represent features
of components that might be of interest from outside;
and controllable variables, that represent aspects of
components which might be externally controlled so,
through them, the internal behavior of a component
can be modified. In addition, toguarantee external ob-
servation and control, CoolBOT components provide
by default two important ports: the control port and
the monitoring port. Fig. 1 illustrates these variables
and ports in a typical control loop for a component
using another component as an external supervisor.
component
i1
o1
in
om
. . .
. . .
control monitoring
supervisor
external
Figure 1: A typical component control loop.
Internally all components are modelled using the
same default state automaton that contains all possible
control paths a component may follow. This default
automaton can be always brought externally in finite
time by means of the control port to any of the con-
trollable states of the automaton, which are: ready,
running, suspended and dead. The rest of states are
reachable only internally, and from them, a transition
to one of the controllable states can be forced exter-
nally. The running state constitutes the part of the
automaton that implements the specific functionality
of the component, and it is called the user automaton.
Furthermore, there are two pair of states conceived
for handling faulty situations during execution. One
of them devised to face errors during resource allo-
cation (starting error recovery and starting error
states), and the other one thought to deal with errors
during task execution (error recovery and running
error states). These states are part of the support
CoolBOT provides for error and exception handling
in components.
Components are not only data structures, but exe-
cution units as well. In fact, CoolBOT components
are mapped as threads when they are in execution;
Win32 threads in Windows, and POSIX threads in
GNU/Linux.
CoolBOT components are classified into two kinds:
atomic and compound components.
• Atomic components that have been mainly devised
in order to abstract low level hardware layers to
control sensors and/or effectors; to interface and/or
to wrap third party software and libraries; and to
implement generic algorithms. In this way they be-
come isolated pieces of deployable software in the
form of CoolBOT components. Thanks to the uni-
formity of external interface and internal structure
the framework imposes on components, they may
be used as building blocks that hide their internals
behind a public external interface.
• Compound components are compositions of in-
stances of several components which can be ei-
ther atomic or compound. Compound components
use the functionality of instances of another atomic
or compound components to implement its own
functionality, and in turn, can be integrated and
composed hierarchically with other components to
form new compound components.
Analogously to modern operating systems that pro-
vide IPC (Inter Process Communications) mecha-
nisms to inter communicate processes, CoolBOT
provides Inter Component Communications or ICC
mechanisms to allow components to interact and
communicate among them. CoolBOT ICC mecha-
nisms are carried out by means of input ports, out-
put ports, and ports connections. Communications
are one of the most fragile aspects of distributed sys-
tems. In CoolBOT, the rationale for defining stan-
dard methods for data communications between com-
ponents is to ease inter operation among components
that have been developed independently, offering op-
timized and reliable communication abstractions.
3 ADAPTIVE CONTROL
A robotic application should be able to adjust its
performance as a function of either the available re-
sources or the resources assigned a priori. The objec-
tive is to force a smooth degradation when resources
are not enough to meet application demands, and al-
low a controlled recovery when the system overload
disappears. See (Hern
´
andez-Sosa, 2003) for a more
complete description.
The CoolBOT framework provides mechanisms to
support the adaptation of component consumption of
computational resources during operation. CoolBOT
adaptation mechanisms include a graceful degrada-
tion procedure when there are not enough resources
available, and a performance status recovery proce-
dure whenever possible. Additional objectives are
ICINCO 2005 - ROBOTICS AND AUTOMATION
400

reactivity, stability and coordination to avoid system
imbalances.
3.1 Elements of Runtime Adaptation
A component, whether atomic or compound, may be
declared as adaptive or non-adaptive. If a compo-
nent is declared as adaptive, it must publish the set
of performance levels at which it can operate. A per-
formance level represents a trade-of between resource
consumption and quality of results (better quality de-
mands higher requirements).
The integration of the dynamic adaptation of com-
ponents inside CoolBOT is designed around two con-
trollable variables: frequency of operation and quality
level. On the frequency axis, a supervisor can modify
the period associated to any of the components un-
der its control, for example, increasing their values to
face CPU saturation. On the quality axis, the supervi-
sors can command lower qualities (sensor resolution,
accuracy of computations, exhaustiveness, etc.) to re-
duce CPU load and latencies at the cost of increasing
uncertainty or decreasing results quality.
The framework will monitor certain operation con-
ditions, named as adaptive observables, at run time.
These include component level measures such as pe-
riod or elapsed/cpu times, and system level measures
such as computational load, battery level or load pro-
file. Some results from processing can also be used
as elements in adaptive control, using the observable
variable facility offered by the framework.
Depending on these measures and their reference
values some elementary degradation/promotion adap-
tive commands can be triggered on adaptive compo-
nents through their control ports.
3.2 Control Strategies
Several control policies have been designed to or-
ganize system adaptation. Their objectives in-
clude avoiding an unbalanced system degrada-
tion/promotion, reduce settling times and fostering
stability.
3.2.1 Timeout control
Timeouts control adapts, on a hierarchical basis, the
runtime demands of shared resources in the system in
order to guarantee the specified frequencies of opera-
tion. Firstly, period violations are detected locally in-
side the time-pressured component, where the control
thread generates the corresponding degradation order.
To avoid systems unbalance, however, local control
actions are limited to a scope defined by two homo-
geneity thresholds (minimum and maximum degra-
dation values). If local adaptation resources are not
enough, the component notifies the problem to up-
per levels, the supervisor component, where global
actions can be executed.
3.2.2 CPU load control
The load control loop operates only at global level.
The system load is estimated and compared with a
certain reference level fixed externally. Promotion
and degradation actions are generated accordingly to
maintain the desired load level.
Candidate selection for targeting control actions
plays an important role in adaptation performance. In
general, an agreement between reactivity and stability
must be reached. The most intense reactions are ob-
tained when high frequency, CPU demanding, multi-
ple destination and/or high-resolution sensor compo-
nents are affected.
The supervisors evaluate these parameters as well
as priority to select target components for adap-
tation commands. Several strategies have been
implemented using different target selection crite-
ria: priority-based, combined priority-degradation,
frequency-based and topology-based.
The adaptive aspects are associated naturally in
CoolBOT to control threads (port threads) inside each
atomic component at low level, and supervisor com-
ponents at higher levels (compound components, sys-
tem level). The early separation of control, processing
and communication areas permits the development of
modular and integrable robotic applications.
4 DEMONSTRATOR
In order to illustrate the operation of the adaptation
mechanisms on real-world applications, we have im-
plemented a mobile robotic application as a demon-
strator.
The application is based on a mechanical head (Di-
rected Perception PTU and USB camera) mounted on
a mobile robot (Pioneer). A notebook has been added
for running the application, being connected via USB
and serial ports to the head and the robot.
A minimal multi-purpose system has been de-
signed combining two main objectives, line following
and object detection, that can be prioritized alterna-
tively. In the configuration used for this paper, the
robot must follow, as tight as possible, a trajectory
defined by a line traced on the floor. Secondarily, the
robot can look at both sides of the route trying to de-
tect some colored balls.
Four CoolBOT components have been used in
the integration of the system corresponding to this
demonstrator: one for controlling the Pioneer robot,
other one for the PTU unit and the camera, another
COMPONENT RUNTIME SELF-ADAPTATION IN ROBOTICS
401
one for line processing and following commands, and
the last one for object detection.
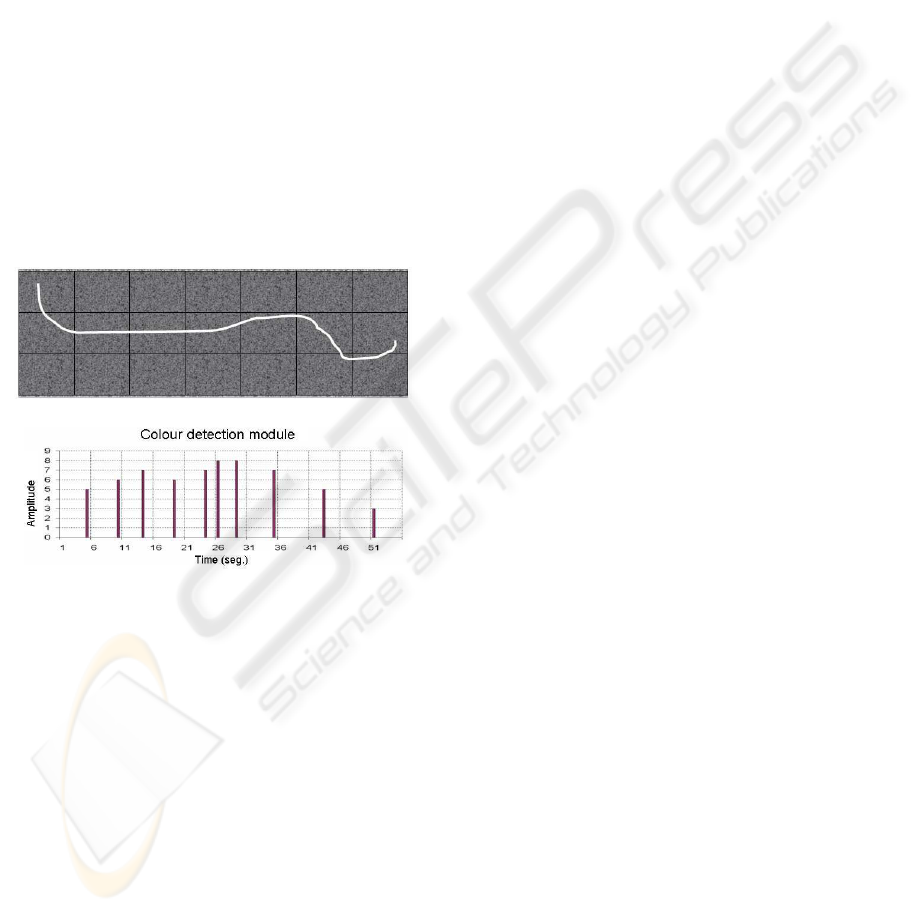
As configured, on straight-line trajectory segments
both tasks can perform alternatively at a pre-defined
frequency. On curved segments, however, the risk of
loosing the track increases. To avoid this, the move-
ment amplitude and activation period of the object
detection component is modulated according to and
adaptive observable computed from the curvature of
the line that the robot must follow. The modifica-
tion of the scanning amplitude can be considered a
quality-based adaptive control, as processing times
are shortened at the cost of reducing the probability of
finding color objects. The modification of the period,
however, corresponds to a frequency-based adaptive
control.
The Fig. 2 represents the executions of the color
detection component task along a trajectory. On
curved segments, both frequency and amplitude of
scanning take lower values. On straight segments
both parameters can increase their values.
Figure 2: Color detection component execution chrono-
gram.
5 CONCLUSION
In this paper, the runtime adaptation mechanisms
available in CoolBOT have been presented. In Cool-
BOT, the control of shared resources has been in-
tegrated in the facilities offered by the integration
framework. If this capacity, is to be used by the pro-
grammer, components must be declared adaptive and
designed with adaptation capabilities. Adaptive com-
ponents can coexist with non-adaptive components in
the same application. These adaptation mechanisms
allows the system to regulate the load that a computa-
tional context may provoke on the system or can be
used to make room for new components when the
computational context changes. The objective has
been to introduce mechanisms that must avoid uncon-
trolled degradation of the system in high load situa-
tions, paving the road to achieve more robust systems.
REFERENCES
Coste-Maniere, E. and Simmons, R. (2000). Architecture,
the Backbone of Robotic Systems. Proc. IEEE In-
ternational Conference on Robotics and Automation
(ICRA’00), San Francisco.
Dom
´
ınguez-Brito, A. C., Hern
´
andez-Sosa, D., Isern-
Gonz
´
alez, J., and Cabrera-G
´
amez, J. (2004). Integrat-
ing robotics software. IEEE International Conference
on Robotics and Automation, New Orleans, USA.
Fleury, S., Herrb, M., and Chatila, R. (1997). GenoM: A
tool for the specification and the implementation of
operating modules in a distributed robot architecture.
In Proceedings of the IEEE/RSJ International Confer-
ence on Intelligent Robots and Systems (IROS), pages
842–848, Grenoble, Francia.
Garlan, D., Cheng, S.-W., Huang, A.-C., Schmerl, B., and
Steenkiste, P. (2004). Rainbow: Architecture-based
self-adaptation with reusable infrastructure. Com-
puter, 9162(10):46–54.
Hern
´
andez-Sosa, D. (2003). Adaptaci
´
on computacional en
sistemas percepto-efectores. Propuesta de arquitec-
tura y pol
´
ıticas de control. PhD thesis, Universidad
de Las Palmas de Gran Canaria.
Jones, S. D. (1997). Robust Task Achievement. PhD thesis,
Institut National Polytechnique de Grenoble.
Kortenkamp, D. and Schultz, A. C. (1999). Integrating ro-
botics research. Autonomous Robots, 6:243–245.
Murphy, R. R. (2000). Introduction to AI Robotics. The
MIT Press.
Musliner, D. J., Goldman, R. P., Pelican, M. J., and Krebs-
bach, K. D. (1999). Self adaptive software for hard
real-time environments. IEEE Intelligent Systems,
14(4):23–29.
Oreizy, P., Gorlick, M. M., Taylor, R. N., Heimbigner, D.,
Johnson, G., Medvidovic, N., Quilici, A., Rosenblum,
D. S., and Wolf, A. L. (1999). An architecture-based
approach to self-adaptive software. IEEE Intelligent
Systems, 14(3):54–62.
Schlegel, C. and W
¨
orz, R. (1999). Interfacing Different
Layers of a Multilayer Architecture for Sensorimotor
Systems using the Object Oriented Framework Smart-
Soft. Third European Workshop on Advanced Mobile
Robots - Eurobot99. Z
¨
urich, Switzerland.
Steenstrup, M., Arbib, M. A., and Manes, E. G. (1983).
Port automata and the algebra of concurrent processes.
Journal of Computer and System Sciences, 27:29–50.
Stewart, D. B., Volpe, R. A., and Khosla, P. (1997). De-
sign of dynamically reconfigurable real-time software
using port-based objects. IEEE Transactions on Soft-
ware Engineering, 23(12):759–776.
ICINCO 2005 - ROBOTICS AND AUTOMATION
402
