
A STRATEGY FOR BUILDING TOPOLOGICAL MAPS THROUGH
SCENE OBSERVATION
Roger Freitas, M
´
ario Sarcinelli-Filho and Teodiano Bastos-Filho
Departamento de Engenharia El
´
etrica, Universidade Federal do Esp
´
ırito Santo
Vit
´
oria - E.S., Brazil
Jos
´
e Santos-Victor
Instituto de Sistemas e Rob
´
otica, Instituto Superior T
´
ecnico
Lisbon, Portugal
Keywords:
Learning, Topological Navigation, Incremental PCA, Affordances.
Abstract:
Mobile robots remain idle during significant amounts of time in many applications, while a new task is not as-
signed to it. In this paper, we propose a framework to use such periods of inactivity to observe the surrounding
environment and learn information that can be used later on during navigation. Events like someone entering
or leaving a room, someone approaching a printer to pick a document up, etc., convey important information
about the observed space and the role played by the objects therein. Information implicitly present in the mo-
tion patterns people describe in a certain workspace is then explored, to allow the robot to infer a “meaningful”
spatial description. Such spatial representation is not driven by abstract geometrical considerations but, rather,
by the role or function associated to locations or objects (affordances) and learnt by observing people’s behav-
iour. Map building is thus bottom-up driven by the observation of human activity, and not simply a top-down
oriented geometric construction.
1 INTRODUCTION
In many applications, mobile robots remain idle for
significant amounts of time, while a new task is not
assigned to it. Similarly, in many research labs mo-
bile robots remain inactive during extended periods
of time, while new sensorial information processing
or navigation algorithms are being tested.
The motivation of this work is to use those periods
of inactivity to observe the surrounding environment
and learn information that can be used later on during
navigation. For example, events like someone enter-
ing or leaving a room or approaching a printer to pick
a document up, convey important information about
the observed space and the role played by the objects
therein.
The development of algorithms to extract useful in-
formation from the observation of such events could
bring significant savings in programming, while af-
fording the robot with an extended degree of flexi-
bility and adaptability. In this work, we explore the
information implicitly present in the motion patterns
people describe in a certain workspace, to allow the
robot to infer a “meaningful” spatial description. In-
terestingly, such spatial representation is not driven
by abstract geometrical considerations but, rather, by
the role or function associated to locations or objects
and learnt by observing people’s behaviour.
The mobile robot we use in this work combines pe-
ripheral and foveal vision. The peripheral vision is
implemented by an omnidirectional camera that cap-
tures the attention stimuli to drive a standard, narrow
field of view pan-tilt (perspective) camera (foveal vi-
sion).
Other research groups have used information asso-
ciated to people’s trajectories to help robot navigation.
In (Bennewitz et al., 2002) mobile robots equipped
with laser sensors are used to extract trajectories of
people moving in houses and offices. The trajectories
are estimated using the Expectation-Maximization
(EM) algorithm and the models are used to predict
human trajectories in order to improve people follow-
ing. In (Bennewitz et al., 2003) the same authors pro-
pose a method for adapting the behavior of a mobile
robot according to the activities of the people in its
surrounding. In (Kruse and Wahl, 1998) an off-board
camera-based monitoring system is proposed to help
mobile robot guidance. In (Appenzeller et al., 1997)
it is developed a system that builds topological maps
by looking at people. Their approach is based on
cooperation between Intelligent Spaces (Fukui et al.,
2003) and robots. Intelligent Spaces are environments
168
Freitas R., Sarcinelli-Filho M., Bastos-Filho T. and Santos-Victor J. (2005).
A STRATEGY FOR BUILDING TOPOLOGICAL MAPS THROUGH SCENE OBSERVATION.
In Proceedings of the Second Inter national Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 168-174
DOI: 10.5220/0001171101680174
Copyright
c
SciTePress
endowed with sensors like video cameras, acoustic
sensors, pressure sensors, monitors and speakers that
send information about the environment to a central
processing system. Usually, the beings present in the
environment are human beings and, in some cases, ro-
bots. From the analysis of the sensorial data, the Intel-
ligent Space can supply the “users” with necessary in-
formation to accomplish some task. For example, this
kind of environment is able to build maps and send
them to the robots, allowing them to navigate safely.
However, this approach is characterized by low scal-
ability, i.e., if the robot is supposed to navigate in a
different environment, such environment should be
structured a priori.
Our approach to this problem is to extract the mo-
tion patterns of people from the robot’s viewpoint di-
rectly, using an on-board vision system. The advan-
tage of such approach is that the robot can learn from
environments that are not structured for this purpose,
thus giving to the learning process more flexibility
and scalability. However, the robot cannot observe
the entire environment at once, which is a limitation
that can be overcome by using an incremental learn-
ing strategy. Such a strategy allows the robot to ob-
serve the environment from an initial position and to
create a partial model representing the observed re-
gion. Then, starting from this initial model, the ro-
bot may change its position in the environment, and
to keep observing it from the new position. From
the new observations, the initial model could be vali-
dated, changed or enlarged.
The implementation of the incremental learning
process is based on an incremental algorithm of Prin-
cipal Component Analysis (PCA). An incremental al-
gorithm that is based on (Murakami and Kumar, 1982;
Hall et al., 1998; Arta
ˇ
c et al., 2002) is here adopted.
The omnidirectional images that are captured by the
robot during the learning process will represent the
nodes of a topological map of the environment. The
incremental PCA (IPCA) algorithm allows the inte-
gration of new images (new nodes) in an online way.
This incremental approach, in conjunction with the
strategy of observing people’s movements, will give
the robot a high level of autonomy on building maps,
while extracting information that allows the percep-
tion of some functionalities associated to specific re-
gions of the environment.
Such topics are hereinafter addressed in the follow-
ing way: Section 2 describes the overall learning sys-
tem, and preliminary results are shown in Section 3.
Section 4 describes the approach to enlarge the par-
tial map created through observation, and in Section 5
some conclusions and discussions about possible de-
velopments are presented.
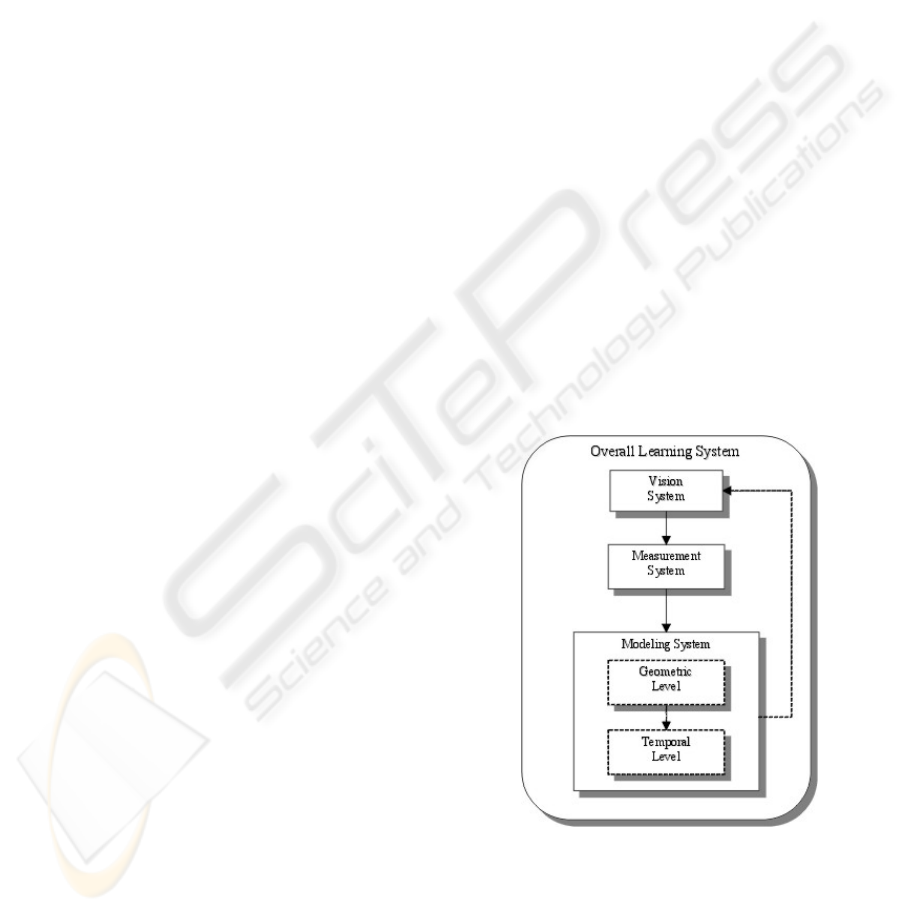
2 OVERALL LEARNING SYSTEM
Fig. 1 shows a scheme of our overall approach. The
most important subsystems, which embed increasing
level of cognition, are the vision, measurement and
modeling subsystems.
The Vision System comprises peripheral and foveal
visual capabilities. Peripheral vision is accomplished
by an omnidirectional camera and is responsible for
detecting movement. Foveal vision is accomplished
by a perspective camera that is able to execute pan and
tilt rotations, and is responsible for tracking moving
objects.
The Measurement System is responsible for trans-
forming visual information into features the robot is
trying to learn, e.g., transforming 2D image informa-
tion into trajectory points on the floor, referred to a
common coordinate frame.
The Modeling System is responsible for building
models that explain data from the measurement sys-
tem. This system operates in two different levels
of cognition, labelled geometric level and temporal
level. The geometric level modeling system outputs
strictly geometric models. The temporal level model-
ing system outputs models that incorporate concepts
like temporal analysis and appearance. Depending
on the kind of model the robot is trying to build, this
system could also drive the way the vision system op-
erates (e.g. controlling the gaze direction).
Figure 1: The Overall Learning System
In this paper, we use the scheme shown in Fig. 1 to
learn possible trajectories and interesting places in the
environment surrounding the robot. In this case, the
Measurement System is responsible for transforming
2D image information into trajectory points on the
floor. The Modeling System is responsible for build-
A STRATEGY FOR BUILDING TOPOLOGICAL MAPS THROUGH SCENE OBSERVATION
169

ing models of possible trajectories and/or finding in-
teresting places in the environment that should be in-
vestigated in more detail (low level modeling).
We assume that the robot has no prior knowledge
about the structure of the working environment. From
any position inside it, the robot should extract useful
information to navigate. In order to do that, it should
be able to detect moving objects, track these objects
and transform this information into possible trajecto-
ries (a set of positions in an external coordinate sys-
tem) to be followed. In the following subsections, we
describe in detail each one of these subsystems.
2.1 Vision System
The vision system deals with two types of visual in-
formation: peripheral and foveal (see Fig. 2). The
peripheral vision uses an omnidirectional camera to
detect interesting image events and to drive the atten-
tion of the foveal camera. The foveal vision system
is then used to track the objects of interest, using a
perspective camera with a pan-tilt platform.
2.1.1 Attention System
The attention system operates on the omnidirectional
images and detects motion of objects or people in the
robot vicinity. Other visual cues could be consid-
ered, but in the current implementation we deal ex-
clusively with motion information. Motion detection
can be easily performed by using background subtrac-
tion. Moving objects are detected by subtracting the
current image from the background image (previously
obtained). In this work, the background is modeled
using the method proposed in (Gutchess et al., 2001),
which uses a sequence of images taken from the same
place and outputs a statistical background model de-
scribing the static parts of the scene.
Fig. 3 shows an omnidirectional image taken in
the laboratory and the result of movement detection.
Once the movement is detected, a command is sent
Figure 2: The Vision System
(a)
20 40 60 80 100 120 140 160
20
40
60
80
1
00
1
20
(b)
Figure 3: Omnidirectional image captured (a), movement
detection (b).
to the pan and tilt camera to drive its gaze direction
towards the region of interest and to start tracking the
moving object. To direct the camera gaze towards the
detected target, we would need to determine the re-
quired camera pan and tilt angles. The camera pan
angle must be set to the angular position of the tar-
get in the omnidirectional image. To determine the
tilt angle, we would need to determine the distance to
the detected target. Instead, for simplification we al-
ways use a reference tilt position that roughly points
the camera towards the observed region.
2.1.2 Tracking System
Whenever the Tracking System is activated, the At-
tention System is deactivated. We are currently us-
ing a simple tracking algorithm to illustrate the idea
of learning about the environment from observing hu-
man actions. The next step is to improve its perfor-
mance and robustness.
The current tracking routine takes two consecutive
images as the input and extracts the pixels display-
ing some change. The result is that different regions
(moving objects) in the two images are highlighted.
Then, we calculate a bounding box around the de-
tected area. The point to be tracked is the middle point
of the bottom edge of the bounding box (theoretically
a point on the floor).
While operating, the system is continuously detect-
ing regions of interest in the peripheral field of view.
The foveal vision system then tracks these objects,
while they remain visible. If the target is not visible
anymore, the Attention System is made active again.
The measurement system described in the sequence
will integrate the information of different tracked ob-
jects into a common coordinate system, from where
more global information can be interpreted.
2.2 Measurement System
In order to estimate trajectories relative to the robot,
it is necessary to estimate the distance from the robot
to the moving object in each image acquired. Usu-
ICINCO 2005 - ROBOTICS AND AUTOMATION
170

ally, this problem is solved using two or more cam-
eras set in different places and applying stereo vision
techniques.
As the robot is stationary while observing the envi-
ronment, consecutive images of a given moving ob-
ject differ only by camera rotations (pan and tilt).
Thus, stereo can not be used to reconstruct the 3D tra-
jectory of the target. The alternative used to solve this
problem is to estimate the homography H between
the floor and the image plane, i.e., to find an a pri-
ori plane projective transformation that transforms an
image point (u,v) into a point on the floor (X,Y,1),or
λ
u
v
1
= H
X
Y
1
, (1)
where H is the 3×3 homography matrix. Initially, the
homography is estimated using a set of ground plane
points, whose 3D positions are known with respect to
some reference frame. Then, when the foveal camera
moves, the homography is updated as a function of
the performed motion. So, as the camera is tracking
the object, its pose is changing, and the same happens
to the homography between the image plane and the
floor. For this reason, we use the pan and tilt angles
to update the homography (see Fig. 4).
We assume that the intrinsic parameters of the pan-
tilt camera are known a priori, after an initial cali-
bration step. The intrinsic parameters are used to de-
compose the homography matrix into a rotation ma-
trix and a displacement vector (camera pose) relating
the camera frame to a world frame. Pan and tilt angles
generate canonical rotation matrices that multiply the
original rotation matrix, thus updating the homogra-
phy.
Figure 4: The Measurement System
In order to recover camera pose, we apply the
methodology presented in (Gracias and Santos-
Victor, 2000), which we briefly describe next. The
homography, H, can be written as
H = λKL (2)
where λ is an unknown scale factor, K is the camera
intrinsic parameter matrix and L is a matrix composed
from the full (3 x 3) rotation matrix R and the trans-
lation vector t. Hence,
L =[
Rt
] , (3)
where
R is a 3x2 submatrix comprising the first two
columns of matrix R. Due to noise in the estimation
process, homography H will not follow exactly the
structure of (2). Alternatively, using the Frobenius
norm to measure the distance between matrices, the
problem can be formulated as
λ, L =argmin
λ,L
λL − K
−1
H
2
frob
(4)
subject to
L
T
L = I
2
, where L is a 3x2 submatrix
comprising the first two columns of L. The solution
of (4) can be found through Singular Value Decom-
position (SVD). Let UΣV
T
be the SVD of K
−1
H.
Then,
L is given by
L = UV
T
, (5)
and
λ =
tr(Σ)
2
. (6)
The last column of L, namely t, can be found as
t = K
−1
H
0
0
1
λ
, (7)
thus resulting
L =[
Lt
] . (8)
The last column of rotation matrix R can be found
by computing the cross product of the the first two
columns. The updated rotation matrix is given by
NewR = R · R
PAN
· R
TILT
. (9)
Finally, the updated homography is then
NewH = λ · K · NewL, (10)
where
NewL =
NewR Newt
Newt = NewR · t.
We have now a way to project all tracked trajecto-
ries onto a common coordinate system associated to
the ground plane. In this global coordinate system,
the different trajectories described by moving objects
can be further analyzed and modeled, as described in
the next subsection.
2.3 Modeling System
The modeling system is responsible for building mod-
els explaining data emerging from the measurement
system. Depending on the nature of the models the
robot is building, this system can drive the way vi-
sion system operates. This system can operate in two
different levels of cognition:
A STRATEGY FOR BUILDING TOPOLOGICAL MAPS THROUGH SCENE OBSERVATION
171

• geometric level - the geometric level modeling sys-
tem outputs strictly geometric models, e.g., metric
trajectories that could be followed by the robot;
• temporal level - the temporal level modeling sys-
tem outputs models that incorporate a temporal
analysis as well as concepts like appearance, e.g.,
images representing regions of the environment can
be associated to a spacial description the robot can
use to navigate (topological maps);
2.3.1 Geometric Level
In this work, the modeling system operates on geo-
metric level, once it aims to interpret the observed
(global) trajectories onto representations that can be
used for navigation. Currently, we consider three
main uses of such data:
• the observed trajectories correspond to free (obsta-
cle free) pathways that the robot may use to move
around in the environment;
• regions where trajectories start or end might corre-
spond to some important functionality (e.g. doors,
tables, tools, etc) and should be represented in a
map;
• if many trajectories meet in a certain area, it means
that that region must correspond to some important
functionality as well.
Hence, from observation the robot can learn the lo-
cation of interesting places in the scene and the most
frequent ways to go from one point to another. Mov-
ing further, the robot also might be able to distinguish
uncommon behaviours, what could be used in surveil-
lance and monitoring tasks.
2.3.2 Temporal Level
The next step in the modeling process would be the
addition of a temporal analysis of the events that oc-
cur while the robot observes the scene. Concepts like
appearance are incorporated in the model as well. Ap-
pearance is often used to solve the problem of mo-
bile robot localization based on video images (Gaspar
et al., 2000). Rather than characterizing from strictly
known geometric features, the approach is to rely on
appearance-based methods and a temporal analysis to
enrich the model of the environment. The temporal
analysis will allow the characterization of pathways,
as well as regions where people usually stop and stay
for periods of time while engaged in some activity.
3 EXPERIMENTAL RESULTS
We performed preliminary experiments in the labora-
tory to verify the performance of the Vision, Measure-
−400 −300 −200 −100 0 100 20
0
−100
0
100
200
300
400
500
TABLE
Workstation Workstation
TABLE
Workstation Workstation
DOOR
ROBOT
Measures performed
X(cm)
Y(cm)
Figure 5: Real data measured from observing people’s
movements.
ment and Modeling systems. The robot stayed ob-
serving the laboratory while people walked by, along
different trajectories. Each trajectory was performed
and recorded separately. The positions on the floor,
measured by the system, are shown in Fig. 5.
The data generated by the Measurement System is
then interpreted by the Modeling System. When an-
alyzing the data shown in Fig. 5, the most interest-
ing point is the kind of information that can be ex-
tracted from such data. One could try, for example, to
extract models of observed trajectories. In this case,
the model could be obtained statistically (Bennewitz
et al., 2002) or deterministically. In the deterministic
case, local (e.g. splines) or global (e.g. polynomial)
models could be used.
To illustrate the idea, the trajectories shown in Fig.
6 were modeled using a linear polynomial model.
Places of interest can be detected as well (see Fig.
6). In this case, we applied a threshold on the data
shown in Fig. 5 based on the number of times a po-
sition was visited. This is done in order to filter the
data, thus discarding positions that are not frequently
visited. Then, we use a k-means algorithm to cluster
the remaining data.
By identifying these places, a strategy for modeling
and identification can be derived, thus providing an
autonomous way of learning models for such places.
For example, as we can see in Fig. 6, three of such
places of interest appear in front of workstations in
the laboratory.
4 ENLARGING THE MAP
The experimental results obtained suggest that, from
its initial position, it is unlikely that the robot can
model correctly all the trajectories and interesting
places in the environment. This is expected to happen
ICINCO 2005 - ROBOTICS AND AUTOMATION
172

−400 −300 −200 −100 0 100 20
0
−100
0
100
200
300
400
500
TABLE
Workstation Workstation
TABLE
Workstation Workstation
DOOR
ROBOT
Modeled Trajectories & Interesting places
X(cm)
Y(cm)
Figure 6: Examples of modeled trajectories and places of
interest.
due to occlusions and the high uncertainty assigned to
distant regions.
Trajectory models based on observations made
from the robot’s initial position are highly affected
by occlusions. Besides the incorrect models, occlu-
sions can lead to a misclassification of the regions of
the environment labelled as “interesting places.” For
example, from the viewpoint of the robot, one can de-
scribe (or model) the region where a door is placed as
a region where people usually appear and disappear.
In most cases, and if occlusions are not present, such a
description would suffice to correctly distinguish the
object door from other “interesting places” in the en-
vironment. However, if occlusions are present, the
trajectory points where they occur would be incor-
rectly modelled as regions corresponding to doors.
From these considerations, it can be concluded that
it is necessary that the robot, based on the initial
model built from its initial position, changes its po-
sition in the environment and restart the observation
process, aiming to validate the current model. A strat-
egy that allows the robot to choose the new viewpoint,
given the current (and partial) metric map, should now
be developed. New measurements could then be com-
pared to the old ones through odometry readings.
Once a trajectory has been validated, the robot
could start the topological mapping. The validated
trajectory would be followed by the robot, while cap-
turing images and building the map in a incremental
way. Each image would be assigned to a map node,
representing a position in the environment. The idea
consists in representing the robot environment as a
topological map, storing a (usually large) set of land-
mark images. To speedup the comparison of the robot
views with these landmark images, it is advantageous
to use low-dimensional approximations of the space
spanned by the original image set. One example is to
use principal component analysis (PCA) that uses the
set of input images to extract an orthonormal basis (or
model) of a lower dimensional subspace (eigenspace)
that approximates the input images.
In the traditional approach to calculate these
eigenspace models, known as batch method, the ro-
bot must capture all the images needed to build the
map and then, using either eigenvalue decomposition
of the covariance matrix or singular value decompo-
sition of the data matrix, calculate the model. This
approach has some drawbacks, however. Since the
entire set of images is necessary to build the model, it
is impossible to make the robot to build a map while
visiting new positions. Update of the existing model
is only possible from scratch, which means that origi-
nal images must be kept in order to update the model,
thus requiring a lot of storage capability.
To overcome these problems, some authors (Mu-
rakami and Kumar, 1982; Hall et al., 1998) proposed
algorithms that build the eigenspace model incremen-
tally (sometimes referred to as subspace tracking in
the communications literature). The basic idea be-
hind these algorithms is to start with an initial sub-
space (described by a set of eigenvectors and asso-
ciated eigenvalues) and update the model in order to
represent new acquired data. This approach allows
the robot to perform simultaneous localization and
map building. There is no need to build the model
from scratch each time a new image is added to the
map, thus making easier to deal with dynamic envi-
ronments. Recently, Arta
ˇ
c et al (Arta
ˇ
c et al., 2002)
improved Hall’s algorithm (Hall et al., 1998) by sug-
gesting a way to update the low dimensional projec-
tions of the images, thus allowing to discard the image
as soon as the model has been updated. Whenever the
robot acquires a new image, the first step consists in
determining whether or not this image is well repre-
sented by the existing subspace model. The compo-
nent of the new image that is not well represented by
the current model is added to the basis as a new vector.
Then, all vectors in the basis are “rotated” in order to
reflect the new energy distribution in the system. The
rotation is represented by a matrix of eigenvectors ob-
tained by the eigenvalue decomposition of a special
matrix (see (Freitas et al., 2003) for details).
Through this IPCA algorithm, it is possible to make
the transition from geometric to appearance models.
The robot will follow the metric trajectory based on
odometry, while acquiring images and building the
topological map of that trajectory incrementally.
5 CONCLUSIONS AND FUTURE
WORK
Currently, the temporal analysis modeling level is un-
der development, and experimental results will be
A STRATEGY FOR BUILDING TOPOLOGICAL MAPS THROUGH SCENE OBSERVATION
173

available soon . A further development of the mod-
eling system could consist of the addition of a Func-
tional Level. This level would be associated with the
affordances of the environment, perceived by the ro-
bot. According to Gibson (Gibson, 1979), “the af-
fordance of anything is a specific combination of the
properties of its substance and its surface taken with
reference to an animal.” In other words, the term af-
fordance can be understood as the function or role,
perceived by an observer, that an object plays in the
environment. Such functionalities are quickly per-
ceived through vision, and full tridimensional object
models are not always required so that their function-
alities in the environment could be perceived.
Even though a robot had a full tridimensional
model of the environment and information about the
movement of the objects, it wouldn’t have a human-
like scene vision. When human beings (and ani-
mals) observe a scene, they “see” several possibilities
and restrictions (Sloman, 1989), such as possibilities
of acquisition of more information through a change
in the viewpoint and possibilities of reaching a goal
through interaction with objects present in the envi-
ronment. Hence, Gibson’s affordances are closely re-
lated to these possibilities and restrictions. Once the
affordances represent a rich source of information to
understand the environment, it is important to develop
a strategy to identify and extract them from the im-
ages captured by the robot. Then, it is possible that
the observation of people while executing common
tasks reveal some affordances in the environment. For
example, one can assign to the doors of an environ-
ment the affordance “passage.” If the robot could ob-
serve people appearing and disappearing in a specific
region, it would perceive that region as an access to
such an environment.
While the robot is building the map or navigating
based on a map previously built, it is likely that the
robot faces an object or a person in its way. In order
to avoid the collision, it is necessary to develop an ob-
stacle detection algorithm and an obstacle avoidance
strategy based on information that can be extracted
from images. Besides, an environment inhabited by
people is subject to changes in its configuration. If
these changes are not detected by the robot and repre-
sented in the environment model, the map would not
be a correct representation of the environment any-
more. Hence, it is also necessary to develop a method-
ology to detect changes in the environment configura-
tion.
REFERENCES
Appenzeller, G., Lee, J., and Hashimoto, H. (1997). Build-
ing topological maps by looking at people: An exam-
ple of cooperation between intelligent spaces and ro-
bots. Proceedings of the International Conference on
Intelligent Robots and Systems (IROS 1997), 3:1326–
1333.
Arta
ˇ
c, M., Jogan, M., and Leonardis, A. (2002). Mobile
robot localization using an incremental eigenspace
model. Proceedings of the International Conference
on Robotics and Automation (ICRA 2002).
Bennewitz, M., Burgard, W., and Thrun, S. (2002). Using
EM to learn motion behaviors of persons with mo-
bile robots. Proceedings of the International Confer-
ence on Intelligent Robots and Systems (IROS 2002),
1:502–507.
Bennewitz, M., Burgard, W., and Thrun, S. (2003). Adapt-
ing navigation strategies using motions patterns of
people. Proceedings of the International Conference
on Robotics and Automation (ICRA 2003), 2:2000–
2005.
Freitas, R., Santos-Victor, J., Sarcinelli-Filho, M., and
Bastos-Filho, T. (2003). Performance evaluation of
incremental eigenspace models for mobile robot local-
ization. In Proc. IEEE 11th International Conference
on Advanced Robotics (ICAR 2003), pages 417–422.
Fukui, R., Morishita, H., and Sato, T. (2003). Expression
method of human locomotion records for path plan-
ning and control of human-symbiotic robot system
based on spacial existence probability model of hu-
mans. Proceedings of the International Conference
on Robotics and Automation (ICRA 2003).
Gaspar, J., Winters, N., and Santos-Victor, J. (2000).
Vision-based navigation and environmental represen-
tations with an omni-directional camera. IEEE Trans-
actions on Robotics and Automation, 16(6):890–898.
Gibson, J. J. (1979). The Ecological Approach to Visual
Perception. Houghton Mifflin, Boston.
Gracias, N. and Santos-Victor, J. (2000). Underwater
video mosaics as visual navigation maps. VisLab-TR
07/2000 - Computer Vision and Image Understanding,
79(1):66–91.
Gutchess, D., Trajkovi
´
c, M., Cohen-Solal, E., Lyons, D.,
and Jain, A. K. (2001). A background model initial-
ization algorithm for video surveillance. International
Conference on Computer Vision, 1:733–740.
Hall, P., Marshall, D., and Martin, R. (1998). Incremental
eigenanalysis for classification. British Machine Vi-
sion Conference, 14:286–295.
Kruse, E. and Wahl, F. (1998). Camera-based monitor-
ing system for mobile robot guidance. Proceedings
of the International Conference on Intelligent Robots
and Systems (IROS 1998), 2:1248–1253.
Murakami, H. and Kumar, B. (1982). Efficient calculation
of primary images from a set of images. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
4(5):511–515.
Sloman, A. (1989). On designing a visual system (towards
a gibsonian computation model of vision). Journal of
Experimental and Theoretical AI, 1(4):289–337.
ICINCO 2005 - ROBOTICS AND AUTOMATION
174
