
MASSAGE CONTROL TO ADAPT HUMAN SKIN MUSCLE
CONDITION BY USING MULTIFINGERED ROBOT HAND
Kazuhiko Terashima, Taku Kondo, Panya Minyong, Takanori Miyoshi
Department of Production Systems Engineering, Toyohashi University of Technology
Hibarigaoka 1-1, Toyohashi, 441-8580, Japan
Hideo Kitagawa
Department of Electronic Control Engineering, Gifu National College of Technology
Kamimakuwa, Motosu, Gifu, 501-0495, Japan
Keywords:
Human skin muscle model, multi-fingered robot hand, massage control.
Abstract:
The purpose of this paper is to propose the adaptive expert masssage robot using a multi-fingered robot.
Towards this goal, the present paper gives a modeling of human skin muscle through robot perception of
impedance, and control strategy using impedance control to implement adaptive control system, even if human
condition is changed. The model validity is demonstrated via many experiments by using multi-fingered robot
hand and human body. Based on robot perception of human muscle impedance, impedance control is proposed.
1 INTRODUCTION
In present society, there are many health support
machine such as massage machines (M. Okada and
Oka, 2004), (S. Kajikawa, 2004), (example: http://
www.mew.co.jp /wellness /momimomi /realpro2 /in-
dex.html, ). Especially, in Japan, highly developed
massage machine was produced. Many pattern of
massage motion are installed according to body con-
dition and human preference, and adjusted by manu-
ally switching. Further, massage motion of most mas-
sage machine is realized by using roller’s movement
and swing. Then, the movable places for massage by
the present machine is limitted, and it is expected to
extend the possible region to conduct the massage.
Therefore, the development of flexible massage robot
by using multi-fingered hand is a challenging subject,
in recent decades.
Authors presented feedforward-type and Neural
Network (NN’s) (H. Kitagawa and Terashima, 2002)
massage motion control for human shoulder by off-
line learning in TUT (Toyohashi University of Tech-
nology) robot hand. This research described how a
two fingered hand was applied, but results of force
and position control were insufficient, because a feed-
back controller was not included due to the lack of a
force sensor. Therefore, the massage motion of this
hand was too limited. In the literature (K. Terashima
and Kitagawa, 2005), (P. Minyong and Terashima,
2003), position control was used before fingertip of
robot hand touches to shoulder, and after touching,
controller was switched from position control to force
control. Reference massage force was taught by ex-
pert therapist, and those data were memoried into
computer by using sheet sensor. These teaching data
were realized by robot hand using teaching-playback
method. Reference force was exactly achieved by us-
ing fedback control. Precision of reproduction by ro-
bot of expert massage of therapist was well realized
(K. Terashima and Kitagawa, 2005), (P. Minyong and
Terashima, 2003). However, in the previous system,
reference massage motion must be taught by thera-
pist’s teaching whenever the change of human body
condition and massage position occurred.
Hence, development of auto-tuning adaptive mas-
sage robot is expected to appropriately adjust mas-
sage motion following to the impedance of human
skin muscle. Thus, in this paper, we present a model
of human skin muscle by using multi-fingered robot
hand to know impedance of human skin muscle and
control strategy by means of impedance control to im-
plement adaptive control system, even if human con-
dition is changed, or massage position is shifted, and
person to be massaged is different.
2 MASSAGE ROBOT SYSTEM
The multi-fingered, multi-jointed humanoid robot
hand is shown in Fig. 1. It has 4 fingers with 13 joints.
The 1
st
finger (thumb) has 4 joints, and the 2
nd
to 4
th
407
Terashima K., Kondo T., Minyong P., Miyoshi T. and Kitagawa H. (2005).
MASSAGE CONTROL TO ADAPT HUMAN SKIN MUSCLE CONDITION BY USING MULTIFINGERED ROBOT HAND.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 407-410
DOI: 10.5220/0001172304070410
Copyright
c
SciTePress

Figure 1: TUT hand with 6-
axis force sensor
Figure 2: Massage motion
control by robot hand
fingers have 3 joints and are arranged like those of the
human hand. The thumb is opposable and redundant.
It has 203.9 [mm] length and 222.2 [mm] width, about
1.2 to 1.5 times larger than an adult man’s hand.
The small AC servo motor actuator for the robot
hand is 30 [mm] in diameter, 30 [mm] length, 70
[g] in weight, and generates 1.4 [Watts]. The small
sized-motor was manufactured by the Yaskawa Elec-
tric Corporation. The servomotor has an integrated
harmonic gear (1/80) and encoder, and directly drives
each joint. The fingertip force sensor is the finger-
tip type of 6-axis force sensors made by BL Au-
totech Ltd. By using this sensor, three components of
force (F
x
,F
y
,F
z
) and three components of momentum
(T
x
,T
y
,T
z
) could be measured.
The typical kinds of finger movements performed
by an expert massage therapist consists of ”pushing,
”picking up”, and ”rubbing”.
”Pushing” is done strongly by thumb, while the
other fingers are used to support the person being
massaged. The tips of the other fingers touch the body
while the tip of the thumb is placed on the shoulder
and pushes toward the tips.
As the first step on designing an expert massage
robot, the fingertip force control of ”Pushing” was
achieved by robot hands described in this paper
3 MODELING OF HUMAN SKIN
MUSCLE AND PARAMETER
ESTIMATION
As human skin model, a lot of models are proposed by
using viscosity-elastic theory. However, each model
is insufficient, and therefore it is impossible to com-
pletely explain all phenomena of muscle state by one
model (Yamada, 1970), (R. Kenedi, 1965).
Then, in this paper, we shall consider spring-mass-
damper model with the correction term of error, and
also consider to investigate the state of human skin
muscle in real time.
Skin muscle model is represented by
f(t) = d + Kp(t) + C ˙p(t) + M ¨p(t) (1)
, where f(t) ∈ R
1
; fingertip force of robot hand,
p(t) ∈ R
1
; fingertip position of robot hand, K; spring
coefficient, M; mass weight, C; damping coefficient,
and d; deviation.
If ”(1)” is discretized, then it follows
φ
k
= Θ
T
ψ
k
(2)
, where
φ
k
= f
k
+ 2f
k−1
+ f
k−2
∈ R
1
, ψ
k
=
[1, p
k
, p
k−1
, p
k−2
] ∈ R
4
, Θ = [4d, L
1
, L
2
, L
3
]
T
,
L
1
= K +
2C
T
+
4M
T
, L
2
= 2K −
8M
T
2
, L
3
=
K −
2C
T
+
4M
T
2
and k is a time step at time kT .
Then, the forgetting factor is given by
w
k,i
= r
k
w
k−1,i
(k > i) (3)
w
k,i
= 1 − r
k
, r
k
= 2
−∆u
k
∆u
k
= min
T
T
H
,
k p
k
− p
k−1
k
X
H
(4)
, where T is sampling time, and T
H
and X
H
are design
parameter. In this research, we used T = 1 [ms], T
H
= 0.1, X
H
= 0.015.
Here, performance index to determine the esti-
mated parameter Θ = [4d, K, C, M]
T
is given by
J
k
(Θ) =
k
X
i=i
0
w
k,i
(φ
i
− Θ
T
ψ
i
)(φ
i
− Θ
T
ψ
i
)
T
= Θ
T
R
k
Θ − Θ
T
Q
k
− Q
k
T
Θ + F
k
(5)
, where R
k
,
P
k
i=i
0
w
k,i
ψ
i
ψ
i
T
, Q
k
,
P
k
i=i
0
w
k,i
ψ
i
φ
i
T
, F
k
,
P
k
i=i
0
w
k,i
φ
i
φ
i
T
, and i
0
is
a starting time to estimate the parameter.
Explanation about the forgetting factor of ”(3)” and
”(4)” follows. When motion is fast, the position shift
will be large every sampling, while the position shift
will be small if motion is slow.
Thus, it is thought to be reasonable that the data
should be forgotten in constant rate if the position
shift is large. On the other hand, the past data should
be stored during long interval without forgetting soon
if the position shift is small in every sampling.
Parameter is estimated such that J is minimized.
The details of deriving parameter estimation is writ-
ten in the literature (Kikuuwe and Yoshikawa, 2003)
for robot perception of impedance which is a kind of
Least Square Method.
Then, the parameter estimation value
ˆ
Θ
k
becomes
ˆ
Θ
k
= R
k
−1
Q
k
∈ R
4
(6)
Here, if we put
ˆ
Θ
′
k
= [d, K, C, M ]
T
, the
following equation is obtained, and the parameter
{d, K, C, M} can be identified.
ˆ
Θ
′
k
= T
ˆ
Θ
k
(7)
ICINCO 2005 - ROBOTICS AND AUTOMATION
408
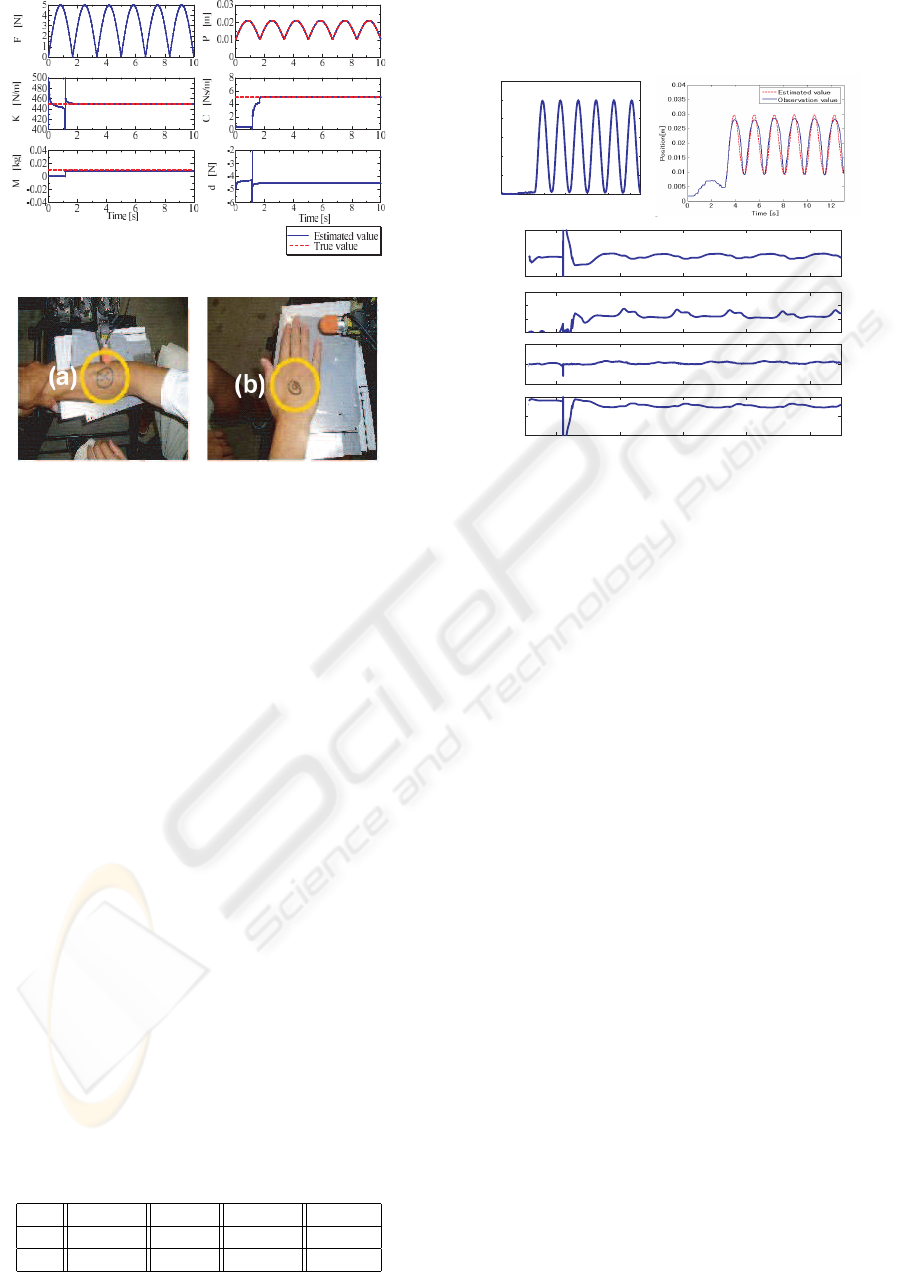
Figure 3: Simulation results to estimate M, K, C and d
Figure 4: Measurement position of human body
, where
T ,
1/4 0 0 0
0 1/4 1/4 1/4
0 T
s
/4 0 −T
s
/4
0 T
2
s
/16 −T
2
s
/16 T
2
s
/16
(8)
Fig. 3 shows the simulation results to estimate the
parameters of ”(1)”. Reasonable estimation results
were obtained by the present identification method.
Then, each parameter of M, K, C and d were well es-
timated as shown in Fig. 3
Fig. 4 shows the measurement position to measure
the impedance of human arm (a) and hand (b). Posi-
tion (a) is the hard side of human hand, and position
(b) is the soft part of human arm. Experimental re-
sults to check the model validity were shown in Fig.
5.
Reference input force with amplitude of 5 [N] and
period of 1.884 [rad/sec] was given from robot finger
to human skin muscle in experiments.
Table 1 shows the estimated values of K,C,M and
d for the measured position (a) and (b), while Fig. 5
shows the comparison between observation value in
real experiments and estimated value calculated from
Table 1: Estimated parameter of human skin muscle for
each position
K C M d
(b) 879.9 27.61 0.0128 -17.31
(a) 233.29 11.41 0.0015 -2.38
model of ”(1)” using the estimated parameter. From
the results, model validity was shown.
0
500
K [N/m]
0
10
20
30
C [Ns/m]
0.02
0
0.02
M [kg]
10
5
0
d [N]
4 6 8 10 12
Time[s]
0 2 4 6 8 10 12
0
1
2
3
4
5
6
Time [s]
Force[N]
Figure 5: Experimental results of model validity (at the po-
sition (a))
4 CONTROL STRATEGY OF
MASSAGE ROBOT
Control strategy of expert massage robot which can
adapt for human muscle condition is shown in Fig. 6.
Human muscle condition by robot perception of
impedance is estimated, and then based on the mus-
cle condition, controller is suitably selected. For ex-
ample, strong impedance control is executed for the
hard muscle, while weak impedance control for the
soft muscle. Impedance of human muscle is mea-
sured by means of force and position’s information
using multifingered robot hand in short sampling pe-
riod such as 10 [msec]. Furthermore, sense informa-
tion such as blood pressure, cardiac rate, brain wave,
etc is measured in long sampling period such as 60
[s], and hence, massage control will be appropriately
adapted by feedback of both impedance and sense in-
formation.
As a basic study to implement a final goal shown
in Fig. 6, impedance control was designed, where the
impedance controller is shown as controller i (i = 1,
2, ... n).
Impedance characteristics of impedance control is
given by
M
d
¨
x + D
d
(
˙
x −
˙
x
d
−
˙
x
f
) + K
d
(x − x
d
− x
f
)
= K
f
(f − f
d
)
(9)
, where f ∈ R
3
is fingertip force, and x ∈ R
3
,
˙
x ∈ R
3
,
¨
x ∈ R
3
, are fingertip position, velocity, acceleration,
respectively. f
d
∈ R
3
is reference force, x
f
∈ R
3
is
MASSAGE CONTROL TO ADAPT HUMAN SKIN MUSCLE CONDITION BY USING MULTIFINGERED ROBOT
HAND
409

Figure 6: Schematic diagram of adaptive control system for
developing expert massage robot
0 2 4 6 8 10
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
Torque [Nm]
Time [s]
Motor 1
Motor 2
Motor 3
Motor 4
(a) Torque of each motor
0 2 4 6 8 10
-1
0
1
x-axis
0 2 4 6 8 10
-1
0
1
y-axis
0 2 4 6 8 10
-6
-4
-2
0
z-axis
Time [s]
Reference
Simulation
Force [N]
(b) Force of fingertip
0 2 4 6 8 10
0
0.1
0.2
x-axis
0 2 4 6 8 10
0
0.1
0.2
y-axis
0 2 4 6 8 10
-0.1
-0.05
0
z-axis
Time [s]
Reference
Simulation
Position [m]
(c) Position of fingertip
(d) Trajectory of fingertip
0
0.1
0.2
0.05
0.1
0.15
0.2
0.25
-0.1
-0.08
-0.06
-0.04
Position of x-axis [m]
Position of z-axis [m]
Reference
Simulation
Position of y-axis [m]
Figure 7: Simulation for massage motion of 1
st
finger
reference position trajectory until robot finger touches
human skin muscle and x
d
∈ R
3
is reference position
trajectory after robot finger touches human skin mus-
cle.
Then, control law having the reference impedance
characteristics is given by
τ =M(θ)J
−1
[M
−1
d
{K
f
(f − f
d
) − D
d
(
˙
x −
˙
x
d
−
˙
x
f
)
− K
d
(x − x
d
− x
f
)} −
˙
J
˙
θ +
ˆ
h(θ,
˙
θ)] − J
T
f
(10)
, where M(θ) is an inertia term of robot hand,
ˆ
h(θ,
˙
θ) is
a nonlinear term of centrifugal force, coriolis, gravity
and friction term, and J is a Jacobian matrix. K
f
is a
feedback gain as K
f
= diag[0.2225, 0.2225, 0.2225].
As a force reference, sinusoidal wave such as mag-
nitude in z-direction is 3 [N] and frequency is 0.3 [Hz]
was given. Control simulation using two fingers was
conducted. In each finger, the same impedance char-
acteristics was given by considering the massage mo-
tion of expert therapist. The control results are given
in Fig. 7, where Fig. 7 is for the 1
st
finger.
In this simulation, the model parameter of human
skin muscle for 1
st
and 2
nd
finger was given by
M = 0.001, K = 360, C = 18, d = 0. Under this
model, x
d
is calculated when f
d
is given. Further-
more, M
d
= I, K
d
= diag[1000, 1000, 1000] and D
d
= diag[61.73, 61.73, 61.73].
From Fig. 7, position and force output well agreed
with reference values. Massage motion was well
achieved to realize the ideal impedance according to
the impedance of human skin muscle in this time.
5 CONCLUSIONS
In this paper, modeling of human skin muscle and pa-
rameter identification has been presented for the pur-
pose such as exactly know the state of human mus-
cle and conduct adaptive massage according to im-
pedance information based on the model of human
skin muscle. Model validity has been demonstrated
through many experiments using a lot of position in
human body. Adaptive control strategy for imple-
menting an expert massage robot to be adjusted for
various conditions has been proposed.
ACKNOWLEDGMENTS
This work was partially supported by the 21
st
Century
COE Program ”Intelligent Human Sensing”
REFERENCES
example: http:// www.mew.co.jp /wellness /momimomi /re-
alpro2 /index.html, F.
H. Kitagawa, T. Terai, M. P. and Terashima, K. (2002). Ap-
plication of neural network for the teaching of mas-
sage to a multi-fingered robot hand. In Journal of Ro-
botics and Mechatronics, vol.14, No.2, pp. 534-541.
K. Terashima, T. Kondo, P. M. T. M. and Kitagawa, H.
(2005). The sense feedback control of human muscle
by multi-fingered robot hand. In Proc. of IFAC World
Congress, Prague (Czech),July, to appear.
Kikuuwe, R. and Yoshikawa, T. (2003). Robot perception
of impedance. In Journal of Japan Robotics Engineer-
ing, vol.21, No.1, pp. 103-108.
M. Okada, T. K. and Oka, H. (2004). Objective evabation
of manual / mechanical massage using bio-mechanical
impedance. In Proc. of 47th Automatic Control Joint
Annual Conference, Chiba, pp. 623.
P. Minyong, T. Miyoshi, H. K. and Terashima, K. (2003).
Expert massage motion control by multi-fingered ro-
bot hand. In International Conference on Intelligent
Robotics and Systems (IROS2003), LasVegas (USA),
Oct., pp. 3035-3040.
R. Kenedi, e. a. (1965). The determination, signification
and application of the bio-mechanical characteristics
of human skin. In Digest of the International Confer-
ence on ME and BE, pp. 531-534.
S. Kajikawa, e. a. (2004). Subjective evaluation of touching
motion to human. In Proc. of SICE System Integration
Division Annual Conference (SI2004), Tsukuba, pp.
2G1-6.
Yamada, H. (1970). Strength of biological materials.
Williams Wilkins Co.
ICINCO 2005 - ROBOTICS AND AUTOMATION
410
