
ACOUSTIC NOISE SUPPRESSION: COMPROMISES IN
IDENTIFICATION AND CONTROL
Ricardo S. S
´
anchez Pe
˜
na, Miquel A. Cuguer
´
o, Albert Masip, Joseba Quevedo, Vicenc¸ Puig
Sistemas Avanzados de Control, ESAII, Universidad Polit
´
ecnica de Catalunya,
Rambla Sant Nebridi 10, Terrassa, Barcelona, Espa
˜
na
Keywords:
Active acoustic noise suppression, robust identification, H
∞
control, µ–analysis.
Abstract:
The objective of this work is to explicitly point out the compromises in the identification and control stages
in an acoustic noise suppression experiment, in terms of performance vs. controller order. The identification
is a control–oriented robust procedure which takes into account both, parametric and non–parametric models,
and is applied to the primary and secondary circuits of an acoustic tube. The control is designed via the H
∞
optimal control theory, and the analysis of the closed loop system is performed via the structured singular
value (µ).
1 INTRODUCTION
Uncertainty in models which describe physical sys-
tems has deserved a great deal of attention. Robust
Control and Identification techniques have worked
with this hypothesis in the ’80s and ’90s respectively.
Uncertainty has been considered both as unstructured
(or global dynamic) and structured (either parametric
or dynamic). Control design techniques are quite dif-
ferent in both cases. Parametric analysis and design is
known to be an NP-hard problem (Braatz. et al., 1994;
Puig et al., 2003). Instead for global or structured
dynamic uncertainty optimal control methods can be
used as the well known H
∞
control and µ–synthesis,
respectively.
The area of Control oriented Identification seeks
either a frequency domain or time domain unstruc-
tured uncertainty family of models from a determinis-
tic worst case viewpoint (Chen and Gu, 2000), Chap
9 of (S
´
anchez Pe
˜
na and Sznaier, 1998). Further re-
search led to combinations of time and frequency do-
main measurements (Parrilo et al., 1998) as well as
parametric and non–parametric models (Parrilo et al.,
1999).
Here we will use some results from the Robust
Identification area which combines parametric and
dynamic models (Parrilo et al., 1999; Baldelli et al.,
2001; Mazzaro et al., 2004) to obtain a global dy-
namic uncertain set describing the physical plant. In
particular, interpolation results based on the general
interpolation theory in (Ball et al., 1990) are applied,
which potentially can combine both type of exper-
imental data: frequency and time domain measure-
ments (Parrilo et al., 1998).
The main objective of this work is to explicitly
point out the compromises which arise in the iden-
tification and controller design stages of a particu-
lar problem. The application example is an acoustic
noise suppression problem, which combines several
characteristics of many other general problems: well
defined parametric components, dynamic uncertainty,
measurement noise, right half plane zeros feedfor-
ward and feedback control (Fang et al., 2004). This
can be found in many other applications in the areas
of civil, mechanical, aeronautics and aerospace engi-
neering, e.g. active vibration suppression, robotics,
large flexible structures, fluid instabilities in rocket
motors, etc. Hence the results obtained in this case
can be used elsewhere.
The main compromises which arise in this applica-
tion are due to two well defined problems:
1. Right half plane zeros in the nominal model which
limits the achievable performance see (Freuden-
berg and Looze, 1985) and an excellent survey in
(Ser
´
on, 2005).
2. High relative modeling errors (multiplicative un-
certainty) in frequencies where the experimental
data is very small. This limits robust stability and
as as a consequence, the achievable robust perfor-
mance at these frequencies.
251
S. Sánchez Peña R., A. Cugueró M., Masip A., Quevedo J. and Puig V. (2005).
ACOUSTIC NOISE SUPPRESSION: COMPROMISES IN IDENTIFICATION AND CONTROL.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Signal Processing, Systems Modeling and
Control, pages 251-257
DOI: 10.5220/0001172802510257
Copyright
c
SciTePress

Figure 1: Acoustic tube connected to the anechoic room.
2 ACOUSTIC NOISE
SUPPRESSION APPLICATION
The application is illustrated in figure 1. It consists
of a 4 meter long square tube connected, in one side
to an anechoic room and by the other to a noise gen-
erator through a primary speaker. It also contains a
reference microphone near the noise generator and
an error microphone near the control actuator (sec-
ondary speaker). The microphones are omnidirec-
tional BEHRINGER ECM8000 with linear frequency
response between 15 Hz and 20 kHz with -60 dB sen-
sitivity. The speakers are BEYMA model 5 MP60/N
of 5”, 50 W and frequency response between 50 Hz
and 12 kHz.
The primary acoustic circuit goes from the refer-
ence to the error microphone. The secondary acoustic
circuit is the one related to the feedback control sec-
tion, that goes from the control speaker to the er-
ror microphone. Primary and secondary circuits are
identified so that feedforward and/or feedback control
can be applied, respectively. The controller is imple-
mented with a DSpace DSP based on a Texas Instru-
ments TMS320C0 over a DS1003.05 (Floating-Point
Processor board).
The control scheme applies the classical method
of generating a signal as close as possible to the real
noise but with opposite phase. This can be performed
in 2 ways, by feedforward and/or by feedback. In this
work we will concentrate in this last approach, be-
cause the most interesting compromises arise in this
case. Nevertheless a great deal of noise can be elim-
inated by combining both approaches, which will be
explored in future works. Previous results in this ap-
plication area can be found in (Fang et al., 2004) and
its references. The authors have some previous expe-
rience in this area that has been presented in (Morcego
and Cuguer
´
o, 2001; Masip et al., 2005). The concep-
tual setup is illustrated in figure 2 and its block dia-
gram in figure 3.
Figure 2: Conceptual view of acoustic noise suppression.
3 PARAMETRIC/DYNAMIC
IDENTIFICATION
The identification procedure is based on (Parrilo et al.,
1999; Baldelli et al., 2001), which combines para-
metric and dynamic models base on time and/or
frequency experimental input data, and solved via
LMI’s (Linear Matrix Inequalities) using the Tool-
box in (Mazzaro et al., 2004). This in turn is based
on a general rational interpolation theory developed
in (Ball et al., 1990), which combines the classical
frequency response (Nevanlinna-Pick) and time re-
sponse (Carath
´
eodory-Fej
´
er) interpolation results.
Due to the fact that the model order in classical
interpolatory results duplicates the number of data
points (in the case of frequency data), it drastically
reduces the model order to fit with parametric mod-
els (usually order 2) the most significant frequency
peaks in the time and/or frequency response. There-
fore, the remaining part of the plant can be suitably in-
terpolated by a non–parametric dynamic model. This
is valid not only in this application but in any other
d
−
-
K
-
G
sec
-
-
δ
?
W
δ
?
d
- d
?
W
p
?
-
6
Secondary
Figure 3: Feedback (FB) design setup, with primary circuit
perturbation (W
p
) and secondary model with multiplicative
uncertainty.
ICINCO 2005 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
252

Figure 4: Kautz bases fitted to the secondary circuit data.
problem where well defined peaks are present in the
experimental data, e.g. flexible structures.
The class of a priori plant and measurement noise
models considered are in the framework presented in
(Parrilo et al., 1998) and correspond to exponentially
stable systems (finite or infinite dimensional) that sat-
isfy the time domain bound
|h(k)| ≤ Kρ
−k
with K < ∞ and ρ > 1. The experimental data are
N
f
(N
t
) samples of the frequency (time) response of
the system at frequency (time) values ω
k
(t
k
). The
parametric information is fitted by means of a finite
set of Kautz orthonormal basis B
i
(z) tuned to the ex-
perimental information as shown in (Baldelli et al.,
2001). The resulting identified model has the form:
H
id
(z) = H
np
(z) +
N
X
i
p
i
B
i
(z), p
i
∈ [a
i
, b
i
]
The optimization procedure which fits simultane-
ously the dynamic portion H
np
(z) and the parame-
ters {p
i
, i = 1, . . . , N} is solved via a set of LMI’s,
hence it is convex. Figure 4 illustrates the fitting of the
Kautz bases to the experimental information. Note
that only the first 3 peaks have been approximated
by means of 2nd. order Kautz models, but not other
peaks that raise at frequencies above 350 Hz. The rea-
son will be explained in section 5 and has to do with
the frequencies bands where performance is critical.
In figures 5 and 12, the parametric and dynamic com-
ponents and model error of primary and secondary
acoustic circuits are presented, and in figures 6 and
7 the identified models.
From figures 5 and 12 it seems that the model error
could be sufficiently small to provide a representative
nominal model to design a controller. Nevertheless,
the significance of this error varies according to the
use we will make of it, as follows:
Figure 5: Parametric and dynamic models and model iden-
tification error of the primary circuit.
Figure 6: Identified model of the primary circuit.
Figure 7: Identified model of the secondary circuit.
ACOUSTIC NOISE SUPPRESSION: COMPROMISES IN IDENTIFICATION AND CONTROL
253

Figure 8: Uncertainty weight and multiplicative identifica-
tion error.
Primary : The primary model can be used in 2 dif-
ferent ways.
• As a perturbation weight at the output for the
controller feedback (FB) design. In this case
only an approximation is enough, due to the fact
that the objective of this weight is to emphasize
the frequency bands where performance is re-
quired. In any case, the efficiency of the weight
in recovering the important frequency bands will
be verified at the robust performance analysis
stage.
• As a model to be used in a feedforward (FF) or
feedback/feedforward (FB/FF) scheme. Here the
model is feeded with a signal that resembles the
noise input to the actual primary circuit (as mea-
sured by the primary microfone) so that subtract-
ing both output signals at the control speaker, the
resulting acoustic noise will decrease. The effi-
ciency of this procedure depends on the additive
error of this model. Hence, the error depicted in
figure 5 is the one to be considered, i.e. subtrac-
tion between model and experimental data.
Secondary : This model is used in the FB loop, and
if the plant is represented by a multiplicative uncer-
tainty set of models, the relative or multiplicative
error is important, due to the fact that both, robust
stability and performance depend on the value this
error takes. Therefore, the error illustrated in fig-
ure 7 should be divided by the value of the experi-
mental data (represented in figure 7), frequency by
frequency. This can take very high values where
the experimental data is near zero magnitude, as in
ω ≈ 100 Hz in the same figure, for example
1
. The
multiplicative error is represented in figure 8.
1
It does not help to consider additive uncertainty, be-
cause the inverse of the nominal model still appears in
the robust stability test, i.e. kW
add
(z)G
−1
sec
(z)T (z)k
∞
=
kW
δ
(z)T (z)k
∞
< 1.
Figure 9: Sensitivity function and performance weight.
Figure 10: Open vs. closed loop comparison (first design).
4 ROBUST CONTROL
The control design procedure is the standard H
∞
optimal control technique applied to solve a mixed
sensitivity problem. The objective is to mini-
mize the effect in the output of the perturbation
(acoustic noise) coming from the primary circuit
(represented by W
p
(z)) for all models described
by the global dynamic (multiplicative) set G
△
=
{[1 + W
δ
(z)δ] G
sec
(z)}. This can be seen from fig-
ure 3 and is a standard problem (Doyle et al., 1992)
that can be solved suboptimally as follows:
min
K(z)
T (z)W
δ
(z)
S(z)W
p
(z)
∞
In general, the optimal solution can be provided by µ–
synthesis at the expense of a higher order controller.
Nevertheless, in this case both solutions are coinci-
dent (S
´
anchez Pe
˜
na and Sznaier, 1998; Zhou et al.,
1996), due to the fact that the system is SISO.
It is clear from the above that the performance ob-
jective is to decrease the sensitivity to the signal pro-
vided by the primary circuit. In particular it is im-
ICINCO 2005 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
254

Figure 11: Less interpolation points concentrated in perfor-
mance region, for secondary circuit to reduce order model.
portant to achieve this at the peaks of the primary cir-
cuit’s response. Therefore, W
p
(z) has been selected
such that it increases the performance in frequencies
where the primary acoustic circuit has a larger gain.
As a consequence, the sensitivity attenuation will be
greater at those peaks (see figure 9). On the other
hand, W
δ
(z) has been obtained from the multiplica-
tive error as pointed out previously (see figure 8).
Special care has been taken to reduce this error at fre-
quencies where high performance is needed, as will
be explained in the next section.
5 IDENTIFICATION AND
DESIGN COMPROMISES
Besides maximizing performance and robustness, it
is important to consider several practical constraints
which should be taken into account. These, will there-
fore generate necessary compromises in the controller
design and in possible identification iterations.
1. The nominal model of the (secondary) system is
stable, but has right half plane zeros.
2. The multiplicative identification error is very diffi-
cult to decrease in frequency bands where the (sec-
ondary) system has a very small gain, e.g. ω ≈ 100
Hz.
3. The controller order should be kept as low as possi-
ble, due to the fact that it will be implemented with
a DSP that has limited resources.
The solutions adopted for each of these issues are ex-
posed next.
1. Non minimal phase models restrict performance
in a well known way. In fact they suffer from
the waterbed effect pointed out in (Freudenberg
and Looze, 1985; Ser
´
on, 2005), which determines
Figure 12: Parametric, dynamic and model error for sec-
ondary circuit (2nd design).
lower bounds in the size of the peaks of the sensi-
tivity function kS(z)k
∞
. It is clear from here that
the lower the sensitivity will be in certain bands,
the higher it will increase in others. Hence, the per-
formance weight W
p
should reflect a decrease in
the sensitivity only on those frequency bands with
the higher peaks of the primary circuit, i.e. ∆ω
in [100, 150] and [275, 350] Hz. These frequency
bands will be called “performance” bands. In this
way, nominal performance should be achieved as
follows: kW
p
Sk
∞
< 1.
2. The multiplicative identification error restricts not
only robust stability, but also performance robust-
ness. Therefore it should be decreased only in the
regions where higher performance is needed, i.e.
at the “performance” bands pointed out previously.
This has been solved by adding more interpolation
points in these frequency bands, while keeping the
total number of points as low as possible not to in-
crease the order, as will be seen next.
3. The controller order is equal to the order of the
nominal model plus that of the weights W
p
and W
δ
.
Therefore, the order of both weights have been kept
as low as possible, while taking into account the
performance and robustness features pointed out
before:
W
p
(s) =
2
Y
i=1
k
i
s
s
2
+ sω
ni
ξ
i
+ ω
2
ni
(1)
W
δ
(s) = 6
(s/200 + 1)
2
(s/10 + 1)(s/1500 + 1)
(2)
with (k
1
, ω
n1
, ξ
1
) = (4, 125, 0.03) and
(k
2
, ω
n2
, ξ
2
) = (2.6, 300, 0.03). These con-
tinuous time weights have been transformed to
discrete time by means of the classical bilinear
transform with parameter 2/T
s
where T
s
is the
sampling time. On the other hand, the order of the
ACOUSTIC NOISE SUPPRESSION: COMPROMISES IN IDENTIFICATION AND CONTROL
255

nominal model has been decreased by eliminating
interpolation points and concentrating them in
the important “performance” bands. In addition,
higher frequency peaks that appear above 350 Hz
in figure 4, have not been fitted with Kautz bases
for the same reason. Furthermore, a balanced
model order reduction step has been applied to the
complete model. Here, the Hankel singular values
of the discarded modes have a magnitude similar
to measurement noise, so that the identification
error is not increased.
Figure 13: Uncertainty weight and multiplicative identifica-
tion error (2nd design).
This requires a new identification iteration for the
total design. Previously, 21 interpolating points and
a 45th. order nominal model had been obtained (see
figure 7). This in turn produced a 51st order controller
which achieved a reduction in noise, at the two impor-
tant frequency peaks of the primary circuit: 12.9dB
for the first peak at ω = 125 Hz and 6.8dB for the
second peak at ω = 310 Hz, as illustrated in figure 10.
Next, only 12 interpolation points are considered
(figures 11 and 12) and a 25th order model is pro-
duced, which leads to a 31th. order robust controller.
Note that in figure 12, the error is lower than in the
previous case at the frequency bands [100, 150] and
[275, 350] Hz. As a consequence, the multiplicative
error is better in these “performance” regions, as il-
lustrated in figure 13.
The controller produces a slightly worst noise re-
duction performance, but still near to the previous de-
sign, 12.5dB for the first peak and 6.17dB for the sec-
ond one, as illustrated in figure 14. This reduction
is at the expense of an amplification at other frequen-
cies due to the waterbed effect, although at these other
frequency bands the primary gain is negligible, as we
have deliberately designed for. Compared with other
works in this area (Fang et al., 2004), this is a reason-
able result.
Figure 14: Open vs. closed loop comparison (second de-
sign).
Figure 15: Structured singular value robust performance
analysis.
The design analysis is presented in figures 15 and
16. In the first one, nominal performance, robust sta-
bility and the robust performance test
|T (z)W
δ
(z)| + |S(z)W
p
(z)| < 1, (3)
∀z = e
ΩT
s
are compared with the optimal measure provided by
the structured singular value µ. As indicated previ-
ously, due to the fact that the system is SISO, the lat-
ter coincides with the analysis measure provided by
(3).
Nevertheless, as observed in figure 13, the weight
does not cover completely the multiplicative error be-
low 100Hz, nor the structured singular value µ is be-
low one in figure 15. The uncertainty weight W
δ
is used for the design stage, but the practical robust
performance measure should be provided by the ac-
tual multiplicative error in figure 13 replaced in equa-
tion (3). This can be seen in figure 16, where al-
though µ is above unity, the practical robust perfor-
mance measure remains below 1, the reason being
ICINCO 2005 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
256
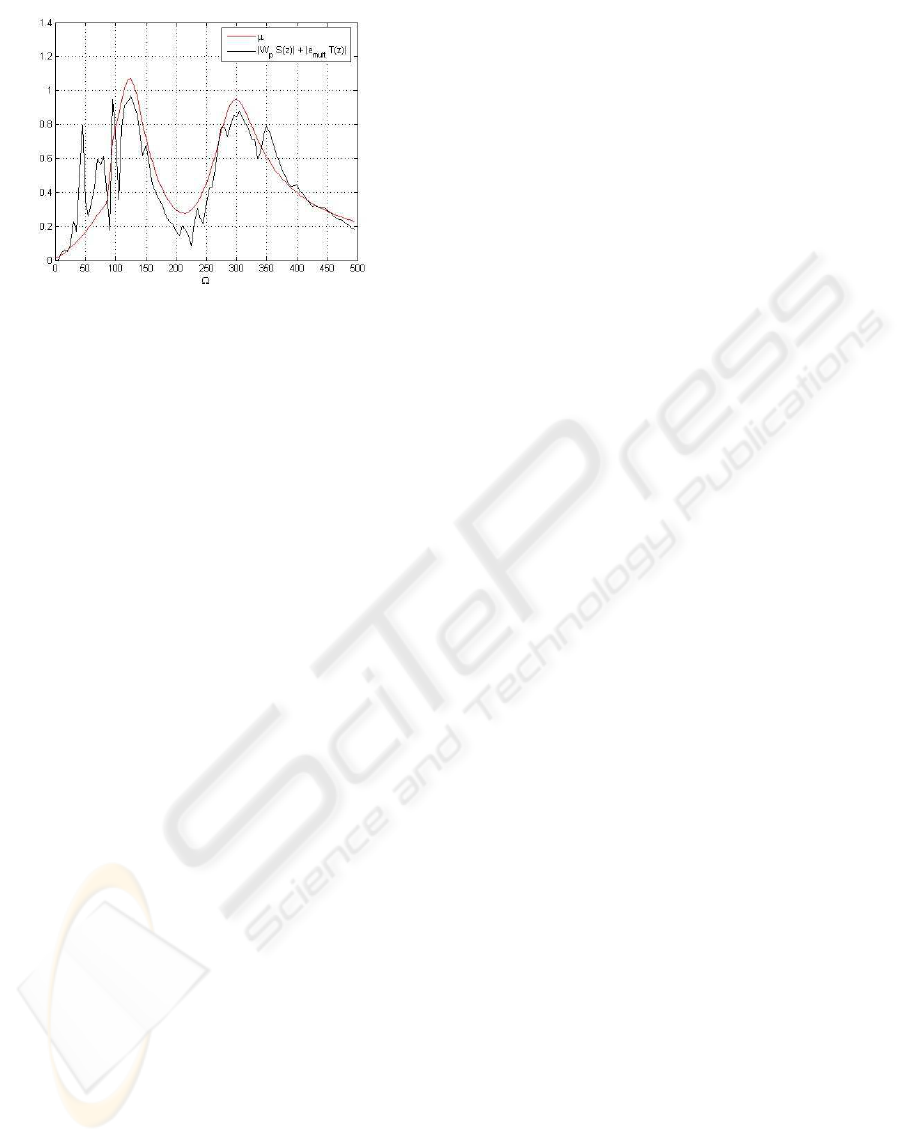
Figure 16: Practical robust performance analysis.
that in the frequency band where uncertainty is very
high, a very low performance is required.
6 CONCLUSION
Here we have presented an example of a
parametric/non–parametric identification and ro-
bust control technique applied to acoustic noise
suppression in a tube. The main compromises,
driven by practical issues, that limit the achievable
performance have been discussed. The limitations
imposed by non minimum phase zeros, controller
model order and achievable identification relative
error have been pointed out, and explicitly related
to performance, robustness and frequency weighted
interpolation.
The problem has been approached by general inter-
polation theory, H
∞
optimal control and µ–analysis,
as identification, design and evaluation tools, respec-
tively. These impose well known quantitative limita-
tions on the achievable performance due to the min-
imum multiplicative uncertainty that can be practi-
cally reached by the identification procedure, at the
expense of increasing the model order. Future work in
this area should explore parametric worst case identi-
fication and robust design methods that could bypass
this limitation to achieve a better performance and/or
obtain a lower order controller. In addition, general
feed-forward/feedback control structures will be ex-
plored as well as adaptive and/or time varying proce-
dures.
ACKNOWLEDGMENTS
The authors wish to thank the support received by the
Research Commission of the Generalitat of Catalunya
(ref. 2001SGR00236) and by Spanish CICYT (ref.
DPI2002-02147).
REFERENCES
Baldelli, D., Mazzaro, M. C., and S
´
anchez Pe
˜
na, R. S.
(2001). Robust identification of lightly damped flex-
ible structures by means of orthonormal bases. IEEE
Transactions on Control Systems Technology, 9(5).
Ball, J., Gohberg, I., and Rodman, L. (1990). Interpola-
tion of Rational Matrix Functions,Operator Theory:
Advances and Applications, volume 45. Birkh
¨
auser.
Braatz., R. D., Young, P. M., Doyle, J. C., and Morari, M.
(1994). Computational complexity of µ calculation.
IEEE Transactions on Automatic Control, 39(5).
Chen, J. and Gu, G. (2000). Control-Oriented System Iden-
tification - An H
∞
Approach. Willey Inter-Science.
Doyle, J. C., Francis, B., and Tannembaum, A. (1992).
Feedback Control Theory. Maxwell/Macmillan.
Fang, B., Kelkar, A., Joshi, S., and Pota, H. (2004). Mod-
elling, system identification, and contrl of acoustic-
structure dynamcs in 3D enclosures. Control Engi-
neering Practice, 12:989–1004.
Freudenberg, J. and Looze, D. (1985). Right half plane
poles and zeros and design tradeoffs in feedback
systems. IEEE Transactions on Automatic Control,
30(6):555–565.
Masip, A., Puig, V., and Quevedo, J. (2005). An optimiza-
tion based approach to interval model identification in
the frequency domain. In Proceedings IFAC, Prague.
Mazzaro, M. C., Parrilo, P. A., and S
´
anchez Pe
˜
na, R. S.
(2004). Robust identification toolbox. Latin American
Applied Research, 34(2):91–100.
Morcego, B. and Cuguer
´
o, M. (2001). Comparaci
´
on de im-
plementaciones en C y Matlab de filtros adaptativos
para DSP. In XXII Jornadas de Autom
´
atica (UAB),
Barcelona, Spain.
Parrilo, P. A., S
´
anchez Pe
˜
na, R. S., and Sznaier, M. (1999).
A parametric extension of mixed time/frequency ro-
bust identification. IEEE Transactions on Automatic
Control, 44(2):364–369.
Parrilo, P. A., Sznaier, M., S
´
anchez Pe
˜
na, R. S., and Inanc,
T. (1998). Mixed time/frequency-domain based robust
identification. Automatica, 34(11):1375–1389.
Puig, V., Saludes, J., and Quevedo, J. (2003). Worst-
Case simulation of discrete linear Time-Invariant in-
terval dynamic systems. Reliable Computing Journal,
9:251–290.
S
´
anchez Pe
˜
na, R. S. and Sznaier, M. (1998). Robust Systems
Theory and Applications. John Wiley & Sons, Inc.
Ser
´
on, M. M. (2005). L
´
ımites de desempe
˜
no y compro-
misos en sistemas de control. Revista Iberoamericana
de Autom
´
atica e Inform
´
atica Industrial, 2(1):4–18.
Zhou, K., Doyle, J. C., and Glover, K. (1996). Feedback
Control Theory. Prentice–Hall.
ACOUSTIC NOISE SUPPRESSION: COMPROMISES IN IDENTIFICATION AND CONTROL
257
