
FEASIBLE CONTROL OF COMPLEX SYSTEMS USING
AUTOMATIC LEARNING
Alejandro Agostini and Enric Celaya
Institut de Robòtica i Informática Industrial, C. Llorens i Artigas 4-6, 2
nd
floor, Barcelona, Spain
Keywords: Robot Control, Reinforcement Learning, Categorization.
Abstract: Robotic applications often involve dealing with complex dynamic systems. In these cases coping with
control requirements with conventional techniques is hard to achieve and a big effort has to be done in the
design and tuning of the control system. An alternative to conventional control techniques is the use of
automatic learning systems that could learn control policies automatically, by means of the experience. But
the amount of experience required in complex problems is intractable unless some generalization is
performed. Many learning techniques have been proposed to deal with this challenge but the applicability of
them in a complex control task is still difficult because of their bad learning convergence or insufficient
generalization. In this work a new learning technique, that exploits a kind of generalization called
categorization, is used in a complex control task. The results obtained show that it is possible to learn, in
short time and with good convergence, a control policy that outperforms a classical PID control tuned for
the specific task of controlling a manipulator with high inertia and variable load.
1 INTRODUCTION
Some robotic applications, like the locomotion of a
multi-legged robot, involve dealing with systems
with complex dynamics (Martins-Filho, 2003). In
these cases, the design of the control system and the
tuning of its parameters become a hard task.
A promising alternative is the use of
Reinforcement Learning (RL) systems (Sutton,
1998) able to improve the control policy learning
from experience. But the application of RL in
complex control tasks is often affected by what is
known as the problem of the “curse of
dimensionality” (Sutton, 1998). As a result of this,
learning a satisfactory control policy would require
an unworkable number of experiences and
intolerably long convergence times. Thus, in order to
make the application of RL feasible, generalization
among similar situations is necessary. Function
approximation techniques are usually applied
(Sutton, 1998), (Smart, 2002) but they have bad
convergence properties (Tsitsikilis, 1997), (Thrun,
1993), or are liable to overestimate the utility of the
visited examples (Thrun, 1993).
In (Porta, 2000) a new kind of generalization
called categorization was proposed. We call
categorization the process of finding subsets of
relevant state variables able to characterize certain
situations that require the same control action,
irrespective of the value of those variables that
become irrelevant in such situations.
In (Porta, 2000), a technique to exploit the
categorizability of the environments in a learning
system was proposed with the Categorization and
Learning algorithm (CL algorithm). Some good
preliminary results were obtained in simple
problems with an improved version of the algorithm
(Agostini, 2004a), (Agostini, 2004b). Those
preliminary versions didn’t succeed when applied to
more complex problems. In this work we present a
statistics-based theoretic reformulation of the CL
algorithm that improves several aspects concerning
the categorization process. With this version we
have been able to learn, in short time, a control
policy that outperforms a classical PID control tuned
for the specific task of controlling a manipulator
with high inertia and variable load.
In section 2 the details of the new algorithm are
presented. Section 3 describes the control problem
and the details for the application of the algorithm to
the selected problem. Section 5 gives the results
obtained. Finally, conclusions are in Section 6.
284
Agostini A. and Celaya E. (2005).
FEASIBLE CONTROL OF COMPLEX SYSTEMS USING AUTOMATIC LEARNING.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics, pages 284-287
Copyright
c
SciTePress

2 CL ALGORITHM
The CL algorithm attempts to find the relevant
features for every situation to predict the result of
executing an action. We present the fundamental
aspects of the CL algorithm current formulation.
It is assumed that the world is perceived through
n detectors d
i
i=1...n. Each detector has a set of
different possible values called features d
ij
j=1,..,|d
i
|.
We say that a feature d
ij
is active when the detector
d
i
takes value d
ij
in its perception.
A partial view of order m, m∈{1..n}, is a
subset of m features denoted by v(d
ij
,...,d
kl
) and is a
virtual feature that becomes active when its m
component features are simultaneously active. A
partial rule is a pair formed by a v and an action a,
r(v,a). We say that a partial rule r(v, a) is active each
time that its partial view v is active. We say that
r(v,a) is used each time that it is active and its action
a is executed. In every situation a set of partial rules
R
v
is active, and a subset of it, R
va
, is used. For each
partial rule r three statistic values are stored: q
r
, an
estimation of the average discounted reward; e
r
2
, an
estimation of the variance of q; and n
r
, the number
of times r has been used.
As in the usual Q-Learning (Watkins, 1992), the
action with highest expected q value must be
determined in every situation the system comes
across. In the case of the CL algorithm, given a
situation there is in general more than one partial
rule active and the problem is to choose the best
prediction of the q value for every possible action.
For each action a, we select the partial rule of R
va
with lowest dispersion in its observed q values,
which we call the winner partial rule. The dispersion
of a partial rule is determined randomly from the
probability distribution of its unknown standard
deviation σ
r
(Blom, 1989),
()
2
2
rr
e
f
f
χ
σ
≈
(1)
where
1−=
r
nf
. The value χ
2
( f ) is randomly
obtained in accordance to a χ
2
distribution with f
degrees of freedom. This probabilistic dispersion
estimation gives the opportunity to predict the q
value to little tested partial rules with low number of
samples n
r
, even if they have large e
r
2
.
Note that q
r
is the estimation of the unknown
mean µ
r
of the distribution of q. The final estimation
of µ
r
is determined by random selection using its
probability distribution (Blom, 1989),
r
r
rr
n
eft
q
2
)(
+≈
µ
(2)
where t(f) is a random value obtained from the t
distribution with f degrees of freedom.
Finally, the action selected is the one with
highest estimation of µ
r
. This form of action
selection provides an adaptive form of exploration
that increases the probability of executing
exploratory actions when predictions are less certain,
and favours the testing of those rules that have been
less experienced.
After the execution of the selected action a, a
reward r
a
is obtained and a new situation R
v
’ is
reached. The actual q value obtained is computed
using the Bellman’s equation:
{
}
)','(|max.
'
aRwinnerrqq
vr
a
a
=
+
=
∀
γ
r
(3)
where γ is the discount factor. The obtained q value
is used to update the statistic values in every partial
rule in R
va
. The q
r
is updated using the same rule as
Q-Learning for stochastic systems. The e
r
value is
updated with identical schema. In both cases the
learning coefficient is:
r
r
n
n
+
=
1
1
)(
α
(4)
Some of the situations are observed more
frequently than others. These may cause some
statistic bias in the estimations (Blom, 1989). In
order to prevent these biases we use the
psychological concept of habituation (Grossberg,
1982). Basically, the habituation process consists in
that repetitive stimuli gradually decrease their
influence in the individual behavior. In our case we
consider a partial rule as a stimulus. More habitual
partial rules are updated at a lower rate.
The learning process starts considering partial
rules involving partial views of order 1. To achieve a
good categorization, new partial rules need to be
created. New partial rules are generated by
combining two used ones. Generation is considered
whenever all the partial rules used in the current
situation have been experienced a minimum number
of times in order to have an acceptable confidence in
the estimations. In order to control the proliferation
of partial rules an elimination criterion involving
redundancy is applied. Two partial rules are
redundant if one of them is included in the other and
their q estimations are similar. If two rules are
redundant, the rule with the highest order is
eliminated and the generation of new rules using a
combination of its corresponding detectors is given
less probability to occur.
FEASIBLE CONTROL OF COMPLEX SYSTEMS USING AUTOMATIC LEARNING
285
3 APPLICATION EXAMPLE
The algorithm is tested in a control problem
consisting in following randomly generated
trajectories for a rotational manipulator with high
inertia and variable load (figure 1). The actuator (M)
is modeled as a DC motor Maxon 118800 (Maxon).
Figure 1: Manipulator
Model equations are (Craig, 1989):
iKmlGsignnMmlJn
MRR
=+++ )cos()()(
22
θθθ
(5)
θ
M
nKVoltRi −=
(6)
where Volt is the input voltage and θ is the angular
position. The simulation is made considering a dt of
1 (ms). The sample frequency is 50 (ms).
In order to evaluate the CL algorithm we
compare the results obtained with a control
performed by a PID system tuned using the second
method of the Ziegler-Nichols rule (Ogata, 2002).
3.1 CL Algorithm Formulation
To make a fair comparison, we use the same input
information as in the PID system: the angular
position error, the angular velocity error, and the
integral of the angular position error
.
As in Q-learning a discretized representation of
the world is needed (Sutton, 1998) (Table 1).
Position error e
θ
near the 0 value is discretized more
finely and is denoted by e
θ0
.
Table 1: Features and actions
Detector Range min Range max Features
0
θ
e
-π/8 π/8 22
θ
e
-π/2 π/2 22
θ
e
-5 5 22
∫
θ
e
-100π
2
100π
2
22
Volt -48 48 17
Our goal is to follow the reference trajectory as
close as possible. A natural reward function is:
θ
etr
a
−=)(
(7)
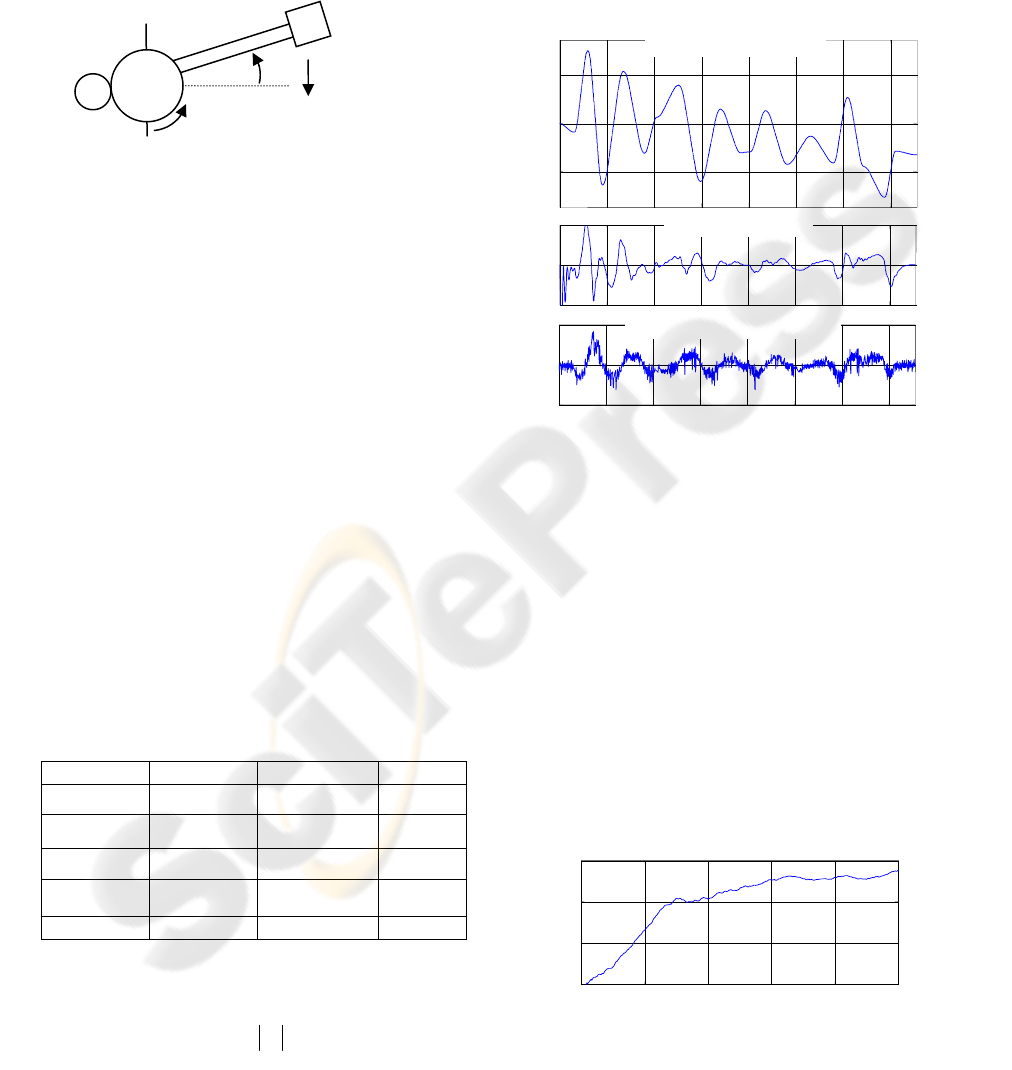
4 RESULTS
To evaluate the control performance of the CL
algorithm 10 different runs of 50000 iterations using
random trajectories were done. The performance
reached after each run is evaluated using a reference
trajectory composed of 20 sigma-shaped randomly
generated subtrajectories of different duration and
angular variation (figure 2).
Figure 2: Instantaneous errors, in larger scale, of the
controls performed by the CL algorithm with minimum
MSE and the PID
The mean squared error (MSE) of the control
performed by the PID system over the reference
trajectory is 3.226E-3 (rad
2
). The average MSE of
the experiments is 2.704E-3 (rad
2
). This is a
remarkable result considering that the CL algorithm
uses discretized variables with a reduced number of
segments against the continuous variables used by
the PID system. This fact causes the low amplitude
ripple present in the CL algorithm control.
As shown in figure 3, the CL algorithm presents
a fast learning convergence, obtaining an acceptable
control performance at early stages of the learning
process (in about 15000 iterations, 12 minutes of
real simulation time).
Figure 3: Average reward in the 10 experiments performed
with the CL algorithm
-0.2
0
0.2
MSE = 3.226E-3 (rad
2
)
PID Control Erro
r
e
θ
(rad)
0 10 20 30 40 50 60 70
-0.2
0
0.2
time (s)
e
θ
(rad)
MSE = 1.488E-3 (rad
2
)
CL Algorithm Control Error
-1
0
1
Reference Trajectory
θ (rad)
l=0.5 (m)
τ
θ
m=10 (Kg)
M n=100
G
0 1 2 3 4 5x10
4
-1.5
-1
-0.5
0
Experiments average reward
r
ewar
d
iterations
ICINCO 2005 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
286
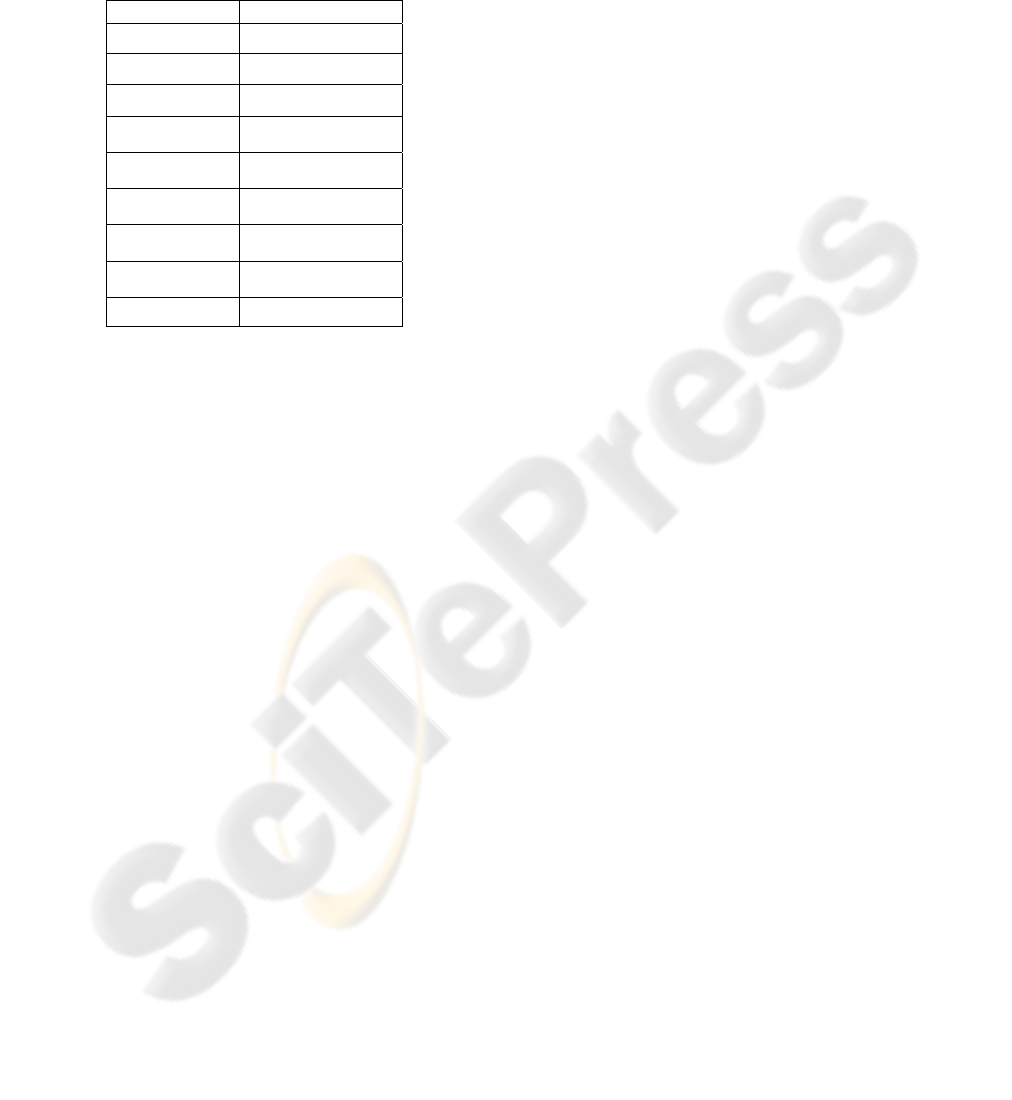
In order to illustrate how the algorithm
generates relevant partial rules we show in Table 2
the mean number of partial rules generated. To
simplify, we only consider their component
detectors.
Table 2: Mean number of partial rules
Detectors Number of rules
Order 1 1469
},{
0
θ
θ
ee
2085
},{
θ
θ
ee
388
},{
0
∫
θθ
ee
269
},{
∫
θθ
ee
444
},{
∫
θ
θ
ee
58
},,{
0
∫
θ
θ
θ
eee
2485
},,{
∫
θ
θ
θ
eee
232
Total 7457
The number of rules generated is very low
compared with the total number of possible
situations, about 362E3, showing the high
generalization reached. The CL algorithm is capable
to learn that the position error is very relevant for the
control task generating rules contain this feature.
The CL algorithm was capable to generate partial
rules containing the velocity error in regions of the
state space near the reference trajectory in which this
detector becomes relevant.
5 CONCLUSIONS
In this work we presented a learning approach that
uses a new kind of generalization, which we called
categorization. The application of this learning
system compares well with traditional control
techniques, and even outperforms them. The CL
algorithm can reach a high generalization with fast
learning convergence. This illustrates the viability of
its application for complex control.
The next step will be the application of
continuous domain methods in the CL algorithm
expecting to overcome the existing problems of
automatic learning in complex control tasks.
ACKNOWLEDGEMENTS
This work has been partially supported by the
Ministerio de Ciencia y Tecnología and FEDER,
under the project DPI2003-05193-C02-01 of the
Plan Nacional de I+D+I.
REFERENCES
Agostini, A., Celaya, E., 2004a. Learning in Complex
Environments with Feature-Based Categorization. In
Proc. of 8th Conference on Intelligent Autonomous
Systems. Amsterdam, The Netherland, pp. 446-455.
Agostini, A., Celaya, E., 2004b. Trajectory Tracking
Control of a Rotational Joint using Feature Based
Categorization Learning. In Proc. of IEEE/RSJ
International Conference on Intelligent Robots and
Systems. Sendai, Japan, pp. 3489-3494.
Blom, G., 1989. Probability and Statistics: Theory and
Applications. The book. Springer-Verlag.
Craig, J., 1989. Introduction to Robotics. The book, 2nd
Ed. Addison-Wesley Publishing Company.
Grossberg, S., 1982. A Psychophysiological Theory of
Reinforcement, Drive, Motivation and Attention.
Journal of Theoretical Neurobiology, 1, 286 369.
Martins-Filho, L., Silvino, j., Presende, P., Assunçao, T.,
2003. Control of robotic leg joints – comparing PD
and sliding mode approaches. In Proc. of the Sixth
International Conference on Climbing and Walking
Robots (CLAWAR2003). Catania, Italy, pp.147-153.
Maxon Motor (n. d.). High Precision Drives and Systems.
Maxon Interelectric AG, Switzerland. From Maxon
Motor Web site http://www.maxonmotor.com.
Ogata, K., 2002. Modern Control Engineering. The book.
4
th
ed., Prentice Hall, New Jersey, United State.
Porta, J. M. and Celaya, E., 2000. Learning in
Categorizable Environments. In Proc. of the Sixth
International Conference on the Simulation of
Adaptive Behavior (SAB2000). Paris, pp.343-352.
Smart, W. and Kaelbling, L., 2000. Practical
reinforcement learning in continuous spaces. In Proc.
of the Seventeenth International Conference on
Machine Learning (ICML).
Sutton, R. and Barto, 1998. Reinforcement Learning. An
Introduction. The book. MIT Press.
Thrun, S. and Schwartz, A., 1993. Issues in Using
Function Approximation for Reinforcement Learning.
In Proc. of the Connectionist Models Summer School.
Hillsdale, NJ, pp. 255-263.
Tsitsikilis, J. and Van Roy, B., 1997. An Analysis of
Temporal Difference Learning with Function
Approximation. IEEE Transactions on Automatic
Control, 42(5):674--690.
Watkins, C., Dayan, P., 1992. Q-Learning. Machine
Learning, 8:279-292.
FEASIBLE CONTROL OF COMPLEX SYSTEMS USING AUTOMATIC LEARNING
287
