
EXTENSION VERSUS BENDING FOR CONTINUUM ROBOTS
Robin McDonnell, George Grimes, and Ian D. Walker
Department of Electrical and Computer Engineering, Clemson University, Clemson 29634 USA
Carlos Carreras
Departamento de Ingenieria Electronica, E.T.S.I.T. Universidad Politecnica de Madrid, 28040 Madrid, Spain
Keywords: Robotics, Continuum, Manipulators, Intervals.
Abstract: In this paper, we analyze the capabilities of a n
ovel class of continuous-backbone (“continuum”) robots.
These robots are inspired by biological “trunks, and tentacles”. However, the capabilities of established
continuum robot designs, which feature controlled bending but not extension, fall short of those of their
biological counterparts. In this paper, we argue that the addition of controlled extension provides dual and
complementary functionality, and correspondingly enhanced performance, in continuum robots. We present
an interval-based analysis to show how the inclusion of controllable extension significantly enhances the
workspace and capabilities of continuum robots.
1 INTRODUCTION
Recent interest in expanding the capabilities of robot
manipulators has led to renewed interest in
continuous backbone “continuum” manipulators
(Robinson and Davies, 1999). The idea behind these
robots is to replace the “vertebrate” (serial chain of
rigid links) backbone of conventional manipulators
with a smooth, continuous, “invertebrate” backbone.
Continuum robots have the potential for
revolutionizing robot operations, by enabling new
applications (operation inside complex environments
such as collapsed buildings, rubble piles, etc.), and
via novel forms of manipulation (compliant and
whole arm manipulation, adaptive environmental
interaction).
The concept of continuum robots is not new
(Hi
rose, 1993). A number of designs have been
suggested, with a number of prototypes constructed
(Robinson and Davies, 1999). Most of these are
inspired by the biological examples of tongues
(Takanobu, Tandai and Miura, 2004), trunks
(Cieslak and Morecki, 1999), (Hannan and Walker,
2003), Tsukagoshi, Kitagawa and Segawa, 2001),
(Wilson, Li, Chen and George, 1993), and tentacles
(Aoki, Ochiai and Hirose, 2004), (Gravagne and
Walker, 2000), (Ohno and Hirose, 2001), Pritts and
Rahn, 2004), (Simaan, Taylor and Flint, 2004),
(Suzumori, Iikura and Tanaka, 1991). Several
designs have made their way to commercial products
(Buckingham and Graham, 2003), (Immega and
Antonelli, 1995).
In almost all of the above designs (with the
n
otable exceptions (Immega and Antonelli, 1995)
and (Pritts and Rahn, 2004)), movement of the
“backbone” is created by bending of the trunk at
discrete locations along its length. While this design
allows for the inclusion of redundant degrees of
freedom along the backbone, the degrees of freedom
available locally are less than in the biological
counterparts (Kier and Smith, 1985). In particular,
the ability to extend the “backbone”, present in
many invertebrate limbs (Kier and Smith, 1985) is
missing. This paper explores the functional gains
obtained by including this “missing” degree of
freedom in continuum robots.
In recent work (Jones, McMahan and Walker,
20
04) we have developed a multi-section continuum
robot, Air-Octor, whose design features both
bending and extension (see figure 1). The design
extends that of (Immega and Antonelli, 1995) in that
the extension of each section can be independently
controlled (as opposed to only the total length
(Immega and Antonelli, 1995)). We are additionally
conducting applied research (McMahan, Jones,
Walker, Chitrakaran, Seshadri and Dawson, 2004)
258
McDonnell R., Grimes G., D. Walker I. and Carreras C. (2005).
EXTENSION VERSUS BENDING FOR CONTINUUM ROBOTS.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 258-265
DOI: 10.5220/0001175502580265
Copyright
c
SciTePress

with the continuum robot hardware introduced in
(Pritts and Rahn, 2004), which also feature
controllable extension, as well as bending, in each
section. Our operational experience with these
robots (compared with our earlier series of
continuum arms which lacked extension (Gravagne
and Walker, 2000), (Hannan and Walker, 2003))
clearly indicates superior performance arising from
the additional degrees of freedom, even for arms
with comparable total degrees of freedom. This
paper analyzes and quantifies this effect, in terms of
the kinematic performance improvement.
Figure 1: Continuum Robot “Air-Octor.”
2 KINEMATICS
We wish to analyze and quantify how the inclusion
of controllable extension in continuum robots
increases the capability over previously developed
designs with only controllable bending. In particular,
from a task-based viewpoint, we are interested in
quantifying any workspace enhancement obtained
by adding extension. For this, we conduct a
comparative interval-based analysis of the forward
kinematics.
In our operational experience with Air-Octor
(Kier and Smith, 1985) and the “Oct-Arm” series of
continuum robots introduced in (Pritts and Rahn,
2004), we have found that the ability to extend the
lengths of sections is very useful. For example we
have found that active use of extension/contraction
can greatly assist the stability of whole arm
grasping, by effectively tightening and loosening the
grip. However, the effects of extension, and their
relationship to those bending, remain nonintuitive. A
tool which could be used to analyze these effects
would be valuable in practical motion planning. In
the following we introduce such a tool.
We restrict our analysis to planar movements,
for simplicity, and since this is sufficient to illustrate
the key advantages of adding extension.
The tip location for a two-section continuum
manipulator (for Air-Octor or Oct-Arm) when
operated in the plane is given by (Blessing and
Walker, 2004), (Jones and Walker, 2004):
111
21121 1
(1 / )[cos( ) 1]
(1/ )[cos( ( )) cos( )]
xk kl
kklkll kl
=−
++−−
1
1
111
21121 1
(1 / ) sin( )
(1/ )[sin( ( )) sin( )]
ykkl
kklkll kl
=
++−−
In the above,
k
i
represents the curvature of the
ith section, and l
i
stands for the section’s length, both
of which are controllable variables. From these
equations, it is possible to evaluate the significance
of including variable section lengths in addition to
variable curvatures. The primary objective of the
analysis is to assess the workspace enhancement of
the continuum robot. In addition, the probability of
reaching the locations within the workspace by
means of different robot configurations will also be
studied.
3 INTERVAL ANALYSIS
The method used for the analysis is based on multi-
interval computations which provide accurate
estimates for workspaces (i.e. 2D ranges) and have
been extended to support probability descriptions in
terms of probability density functions (PDFs).
Multi-interval computations are an extension of
interval analysis (Moore, 1979) that minimizes its
overestimation problem. This problem appears when
multiple instances of the inputs appear in the
equation or algorithm under study (i.e. there are
crossed data dependencies, as in the equations
above). This method parallels that in (Walker and
Carreras, 2003) where linear (straight line) links
were considered. It also refines the initial results in
(Blessing and Walker, 2004), where plain interval
arithmetic was used for the analysis of a different
continuum design, in which the bending location
could be mechanically adjusted off-line, but not
actively controlled.
Interval arithmetic allows fast and easy
computations on ranges of values by means of
computations on the intervals' endpoints (Moore,
1979). It is exact if there are no crossed data
EXTENSION VERSUS BENDING FOR CONTINUUM ROBOTS
259

dependencies, but otherwise it produces oversized
results. A classical example of this effect is known
as the cancellation problem: given an interval
I =
[
a,b], the computation I-I = [a-b,b-a] ≠ [0,0]. One
alternative to reduce overestimation is to use multi-
intervals: the original interval is divided into smaller
adjacent disjoint subintervals, the computation is
performed for each of them, and the individual
results are merged into a single interval result. In the
previous example, if I is represented by two
subintervals, [
a,(a+b)/2] and [(a+b)/2,b], the
merging of the individual results of the computation
I-I produces the interval [(
a-b)/2,(b-a)/2] ⊂ [a-b,b-
a], thus reducing overestimation. Greater reductions
are achieved if more subintervals are used.
Therefore, multi-intervals are a simple yet powerful
approach for function evaluation where increased
precision (i.e. using more subintervals) is directly
available at the cost of increased computation time.
The methodology to use multi-intervals has
been automated in an in-house framework called
Abaco, already used in (Walker and Carreras, 2003).
Abaco is based on the GNU Multiple Precision
Library GMP and includes all the tools used to carry
out this study. Abaco has also been successfully
used in other tasks related to reliability analysis and
digital electronic design, and is constantly upgraded
with new features and capabilities. Extensions to
handle probabilities (each interval can have a
probability, thus allowing the computation of output
PDFs from input PDFs) are also supported. The
significance analysis presented here has also
motivated specific extensions to handle
trigonometric functions and 2-dimensional outputs
(i.e. locations in the plane), in the computation and
graphics tools within the framework. In addition, the
tuning of the tools for each particular analysis has
been simplified to avoid test runs required in
previous versions of the tools. Using Abaco,
different multi-section robots can be quickly and
extensively analyzed by simply specifying their
kinematic equations.
The Abaco implementation is based on a
discretization of the numerical space that simplifies
the definition of two basic concepts: interval
adjacency and number probability. Both are key
issues when partitioning the input ranges into multi-
intervals and when merging interval results extended
with probabilities. Such discretization is described in
terms of the precision (i.e. fractional bits) used to
represent the endpoints of the input intervals. No
precision is lost as the computations of the equations
progresses, since precisions are modified according
to the requirements of the operations involved.
Trigonometric operations are an exception to this as
they are not supported by the GMP library. In this
case, they are computed using the standard math
library and the results are represented with the same
number of fractional bits as the input variables.
Automation and selectable precision are
probably the greatest advantages of the multi-
interval method implemented in Abaco over other
classical methods. Standard sensitivity analysis
suffers from the complexity of computing (by hand)
the equations in partial derivatives
(minimization/maximization problem). Simulations
based on random sampling methods (Monte-Carlo
and Latin Hypercube) do not provide accurate
information about output ranges (i.e. to evaluate
workspace enhancement) as they are intended to
obtain statistical values of the outputs (mean,
variance). Finally, it may seem that numeric
simulations of the kinematic equations for a grid of
input points could be used to obtain workspace
estimates. However, for these estimates to be
accurate, and especially if PDFs must also be
obtained as in this analysis, the number of points in
such grid must be very large. From the tests run, the
computation times required by these standard
numeric simulations are much longer than those
required by the multi-interval method for a given
accuracy in the results.
4 SIMULATION PARAMETERS
For the purpose of evaluating the potential
advantages of variable lengths in addition to variable
curvatures, a number of configurations for different
multi-section robots and variability conditions have
been studied. In particular, assuming that the total
robot length remains constant (
l = 29.8 cm), two
types of robots have been analyzed considering the
ratio between their nominal section lengths: robot
R
1
with
l
1
/l
2
= 1 (l
1
= l
2
= 14.9 cm), and robot R
2
with
l
1
/l
2
= 2 (l
1
= 19.87 cm = 2l
2
).
The angle in degrees of a section of length
l and
curvature
k, θ = 180lk/π, has been used as the
variable parameter in the exploration of the
configuration space. In particular, nine basic angles
have been considered: 15, 45, 90, 135, 180, 225,
270, 315 and 360 degrees. For each robot type and
basic angle
θ, two basic curvatures can be obtained:
b
1
= πθ/180l
1
and b
2
= πθ/180l
2
. Expressing the
section curvatures in terms of these basic curvatures,
four types of configurations per robot type and basic
angle have been analyzed: configuration
C
1
(k
1
= b
1
,
k
2
= b
2
), configuration C
2
(k
1
= b
1
, k
2
= b
2
/2),
ICINCO 2005 - ROBOTICS AND AUTOMATION
260

configuration C
3
(k
1
= b
1
, k
2
= -b
2
), and
configuration
C
4
(k
1
= b
1
, k
2
= -b
2
/2). Therefore, 36
configurations have been evaluated per robot type.
Two different strategies have been considered
for the comparison of variable lengths and variable
curvatures in each of the previous configurations,
leading to two different and complementary
analyses. The first analysis is based on variations in
lengths and in curvatures of up to ±5% of their
nominal values. The second analysis is based on
variations around the nominal lengths and curvatures
that change
θ up to ±5 degrees. Each of the previous
analyses is conducted by running three simulations
where variations are described in terms of multi-
intervals. In the first simulation, only curvatures are
varied. In the second simulation, only lengths are
varied. In the third simulation, the variations of
curvatures and lengths from the two previous
simulations are considered simultaneously. This has
allowed verifying the impact of each type of
variation in the robot workspace.
Considering that each of the 72 configurations
is characterized through 6 simulations, a total of 432
simulations have been run to carry out this study.
The Abaco tool set supports the full automation of
the process, from input multi-interval representation
to output plot generation, for all 432 simulations at
once.
In the multi-interval computations, the precision
of the input representation has been fixed to 16
fractional bits, because of the discretization required
by Abaco. It is considered that 2
16
= 65536 different
values between any two consecutive integers are
more than enough for such discretization not to be
relevant in the results, while still allowing for
maximum performance in the computation of the
GMP functions.
With respect to the number of intervals used for
the multi-interval representation of the inputs, no
optimal approach exists in terms of providing the
minimum simulation length for some given output
error. Therefore, a simple heuristic based on the size
of the input ranges has been used. The results from
this approach have been validated in all
representative cases (i.e. when compared to the
results from simulations using half or twice as many
input intervals the differences are negligible).
The results from each simulation are
represented as a reachability plot which is a 3D plot
where the x-y plane describes the planar workspace
of the robot for the given curvature and/or length
variations in the given configuration. The z axis
describes the probability of reaching each position in
the workspace as result of the input variations being
considered, thus providing a measure of redundancy.
The workspace is also represented as a separate 2D
plot. Only three fractional bits are used in the plot
representation of the results to allow the
visualization of the contour lines.
5 RESULTS
The results in the figures below show that varying
lengths in addition to curvatures substantially
enhances the robot workspace, with the two aspects
clearly complementary to each other. In particular,
the plots reveal that combining variable curvatures
and lengths leads to larger workspaces. Due to the
lack of space and the similarity of the conclusions,
only a few of the analyzed configurations are
presented here.
Figure 2 illustrates one possible physical
configuration for the robot where the lengths
l
1
and
l
2
are equal and the angle formed by each section is
45˚. For this configuration, the first analysis method
is presented, based upon variations in lengths and in
curvatures of up to ±5% of their nominal values.
Figure 3 illustrates the workspace achieved by the
robot if the curvature of the sections is changed by
altering the radius by ±5% while the length of the
sections remains constant.
Figure 2: Physical configuration
In this configuration, only the 2D workspace
plots are presented. Figure 4 illustrates the
workspace when the curvature of the sections is
unchanged while the length of the sections varies
±5% of the nominal length. In Figure 5, both the
curvature and the length have varied up to ±5% of
their nominal values.
EXTENSION VERSUS BENDING FOR CONTINUUM ROBOTS
261
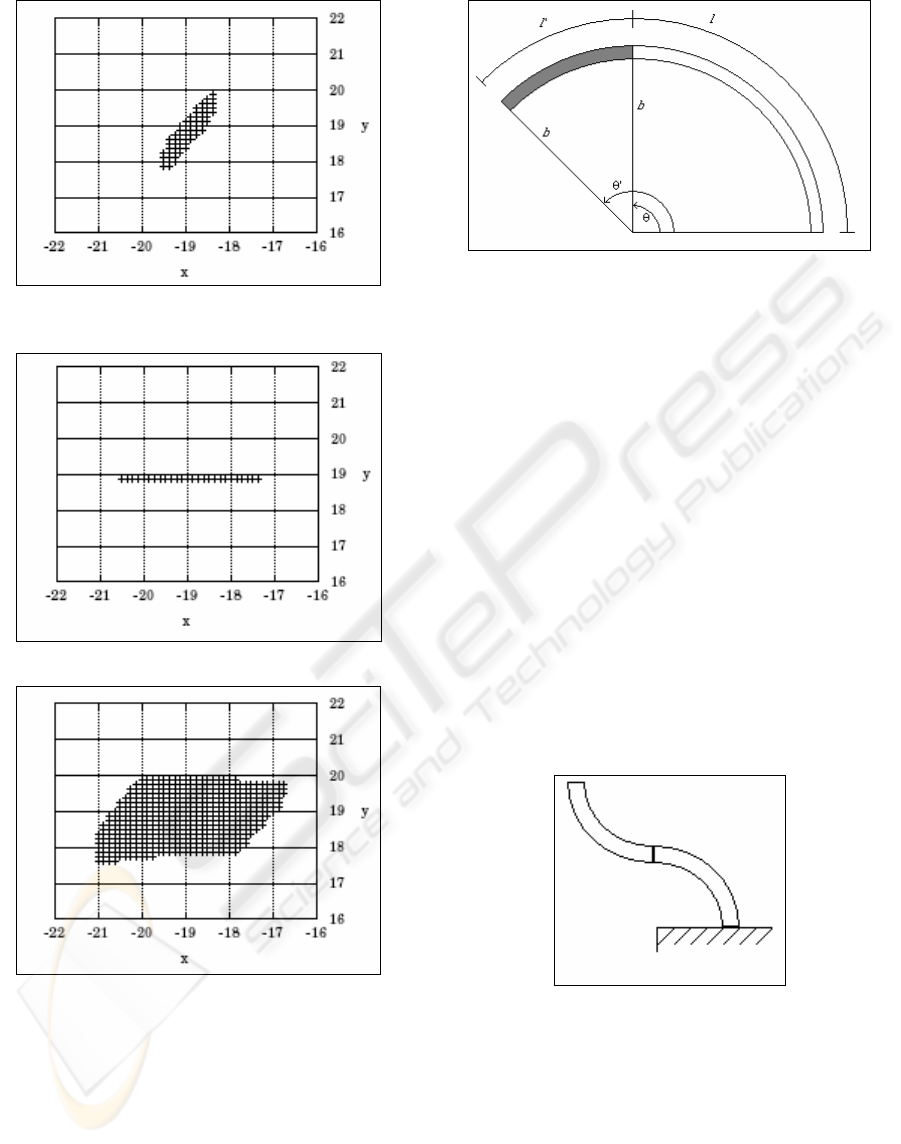
Figure 3: Curvature change only for example of Figure 2
Figure 4: Length change only for example of Figure 2
Figure 5: Length and Curvature change for example of
Figure 2
As can be seen in Figures 3, 4, and 5, changing
the curvature of the sections in concert with the
lengths results in a significantly increased
workspace. Indeed, the workspace achieved by the
combined variations is a form of vector-product of
the length and curvature workspaces.
Figure 6: Changing length for a curved section
As the sections of the robot extend and retract,
the angles formed by the sections (
θ) also change,
even though manipulation was performed on the
length alone. This is an inadvertent effect that comes
from altering the length of a curved section. In
Figure 6, this concept is illustrated for a single
curved section. As the length of the section increases
from
l to l+l`, the radius (which in turn defines the
curvature 1/radius) remains the same while the angle
θ increases to θ ΄.
In Figure 7, we consider a different
configuration. Here, the angle formed by section 2 is
the negative of the angle formed by section 1,
essentially changing the direction of concavity for
section 2. The lengths of the individual sections are
again equal, but the angles formed are (90, -90) for
sections 1 and 2 respectively. The second analysis
method is presented for this configuration, based on
variations around the nominal lengths and curvatures
that change
θ up to ±5 degrees.
Figure 7: Physical configuration
ICINCO 2005 - ROBOTICS AND AUTOMATION
262
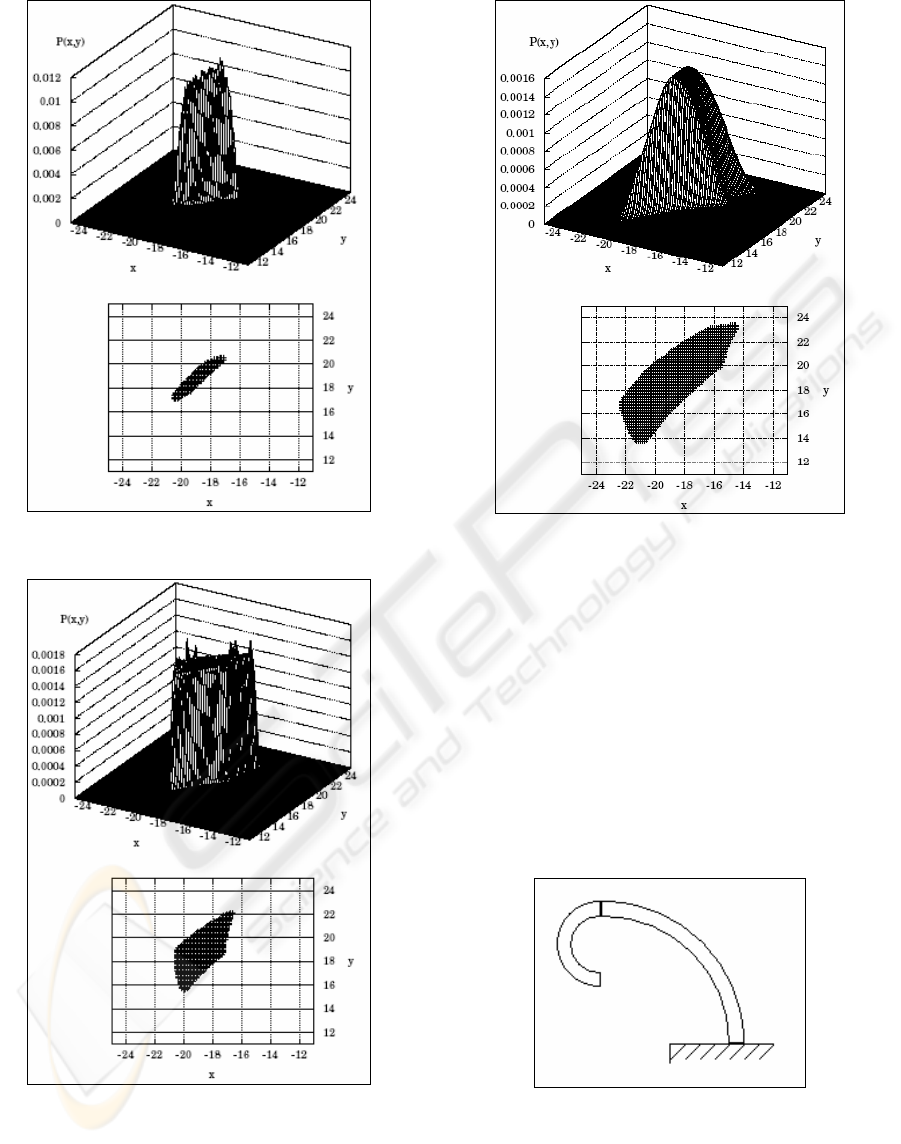
Figure 8: Curvature change only for example of Figure 7
Figure 9: Length change only for example of Figure 7
Figure 10: Length and Curvature change for example of
Figure 7
In Figure 8, the curvatures of the sections have
been changed ±5 degrees respectively. Figure 9
illustrates a change in link length that will change
θ
up to ±5 degrees, and Figure 10 is the workspace
formed when the link length and the curvatures are
changed in concert. Once again, the resultant
workspace in Figure 10 appears as an intuitive
combination of Figures 8 and 9.
In Figure 11, a third configuration is examined.
Here,
l
1
/l
2
= 2 and the angles formed by the length
and curvatures of the sections are (90˚, 180˚)
respectively.
Figure 11: Physical configuration
EXTENSION VERSUS BENDING FOR CONTINUUM ROBOTS
263
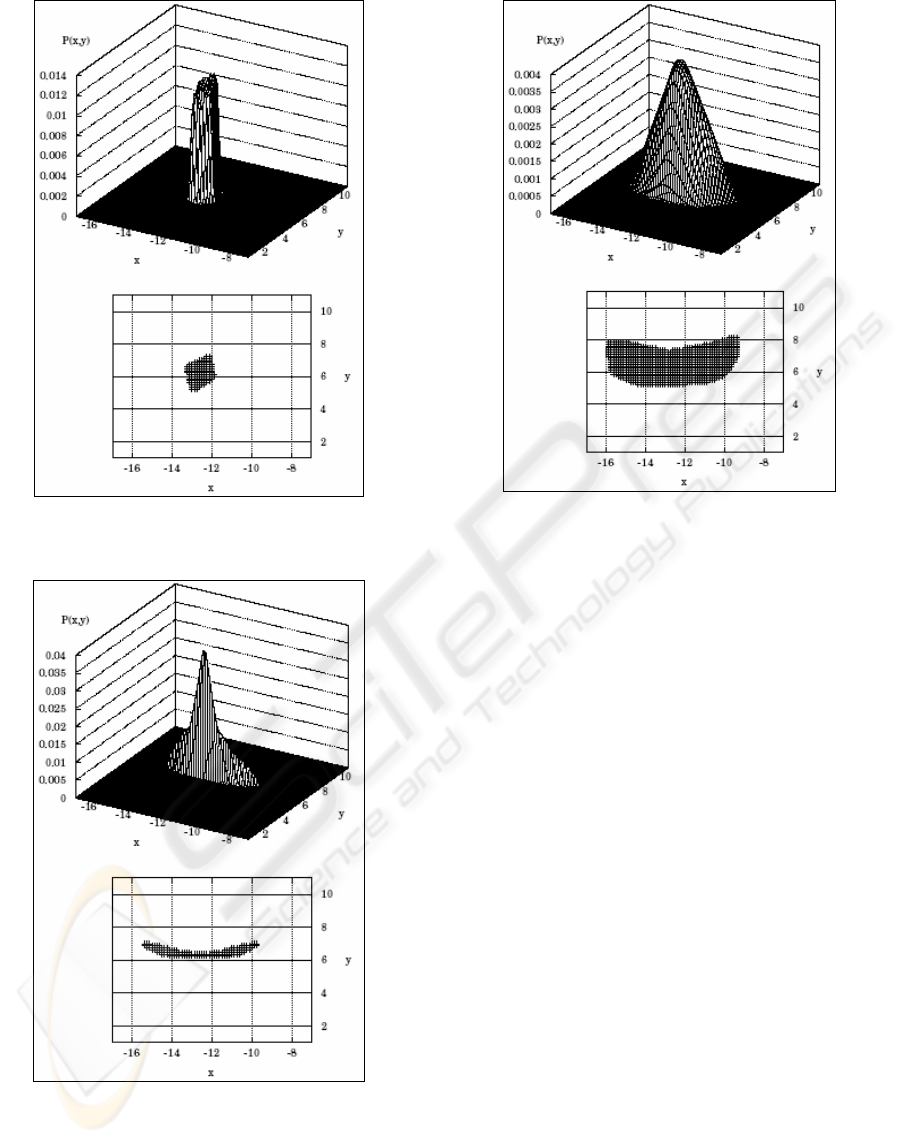
Figure 12: Curvature change only for example of Figure
11
Figure 13: Length change only for example of Figure 11
Figure 14: Length and Curvature change for example of
Figure 11
Figure 12 illustrates both the workspace and the
PDF generated when the length of the sections vary
such that
θ alters ±5 degrees.
When part of the workspace has a low PDF, as
can be observed in Figures 13 and 14, it indicates
that only a few combinations of the input variables
would allow reaching that part of the workspace.
This relationship could be important with trajectory
planning, among other topics.
In the configurations examined, the workspace
formed from the combined change in the curvatures
and the lengths was significantly larger than the
workspace achieved when only one attribute was
altered. The fact that the resultant workspace
appears as a combination of the two individual
workspaces is also intuitive.
The above examples are typical of the results of
the study, in terms of showing how both bending
and extension significantly affect the workspace, and
in complementary ways. The results also provide the
workspace for a large number of more nonintuitive
configurations. So the approach can also be seen as a
useful tool for task and motion planning.
6 CONCLUSIONS
This paper clearly shows how extension is
complementary to bending in continuum structures,
in terms of workspace enhancement. This is a useful
ICINCO 2005 - ROBOTICS AND AUTOMATION
264

feature that has been taken advantage of by a variety
of animals. The results motivate the inclusion of
extension in future continuum robot designs. Our
current work focuses on the use of the results in this
paper for optimal design and operation of continuum
robots by developing “synergies” from combinations
of extension and bending in the Oct-Arm series of
continuum robots.
ACKNOWLEDGEMENTS
This work supported by DARPA Contract N66001-
C-8043, and by the Spanish Ministry of Science and
Technology under Project TIC2003-09061-C03-02.
REFERENCES
Aoki T., Ochiai A., and Hirose S., 2004. Study on Slime
Robot. In IEEE Int.. Conf. on Robotics and
Automation, New Orleans, pp. 2808-2813.
Blessing M. and Walker I.D., 2004. Novel Continuum
Robots with Variable-Length Sections. In 3
rd
IFAC
Symposium on Mechatronic Systems, Sydney,
Australia, pp. 55-60.
Buckingham R. and Graham A., 2003. Reaching the
unreachable - snake arm robots. In Int. Symposium of
Robotics, Chicago.
Cieslak R. and Morecki A., 1999. Elephant Trunk Type
Elastic Manipulator – A Tool for Bulk and Liquid
Type Materials Transportation. Robotica, vol. 17, pp.
11-16.
Gravagne I.A. and Walker I.D., 2000. On the Kinematics
of Remotely-Actuated Continuum Robots. In IEEE
Int. Conference on Robotics and Automation, San
Francisco, pp. 2544-2550.
Hannan M.W. and Walker I.D., 2003. Kinematics and the
Implementation of an Elephant’s Trunk Manipulator
and Other Continuum Robots. Journal of. Robotic
Systems, 20(2), pp. 45-63.
Hirose S., 1993. Biologically Inspired Robots., Oxford U.
Press.
Immega G. and Antonelli K., 1995. The KSI Tentacle
Manipulator. In IEEE Int. Conference on Robotics and
Automation, pp. 3149-3154.
Jones B. and Walker I.D., 2004. A New Approach to
Jacobian Formulation for Multi-Section Continuum
Robots. In IEEE Int. Conf. on Robotics and
Automation, Barcelona, pp. 3279-3284.
Jones B., McMahan W. and Walker I.D., 2004. Design
and Analysis of a Novel Pneumatic Manipulator. In 3
rd
IFAC Symposium on Mechatronic Systems, Sydney,
Australia, pp. 745-750.
Kier W.M. and Smith K.K., 1985. Tongues, Tentacles,
and Trunks: the Biomechanics of Movement in
Muscular-Hydrostats. Zoological Journal of the
Linnean Society, vol. 83, pp. 307-324.
McMahan W., Jones B., Walker I.D., Chitrakaran V.,
Seshadri A., and Dawson D., 2004. Robotic
Manipulators Inspired by Cephalopod Limbs. In
CDEN Design Conf., Montreal, pp. 1-10.
Moore R.E., 1979, Methods and Applications of Interval
Analysis, SIAM, Philadelphia.
Ohno H. and Hirose S., 2001. Design of Slim Slime Robot
and its Gait of Locomotion. In IEEE/RSJ Int.
Conference on Intelligent Systems, Maui, Hawaii,
USA. pp. 707-715.
Pritts M.B. and Rahn C.D., 2004. Design of an Artificial
Muscle Continuum Robot. In IEEE Int. Conference on
Robotics and Automation, New Orleans, pp. 4742-
4746.
Robinson G. and Davies J.B.C., 1999. Continuum Robots
– A State of the Art. In IEEE Int. Conf. on Robotics
and Automation, pp. 2849– 2854.
Simaan N., Taylor R., and Flint P., 2004. A Dexterous
System for Laryngeal Surgery. In IEEE Int.
Conference on Robotics and Automation, New
Orleans, pp. 351-357.
Suzumori K., Iikura S., Tanakan H., 1991. Development
of Flexible Microactuator and its application to
Robotic Mechanisms. In IEEE Int. Conf. on Robotics
and Automation, pp. 1622-1627.
Takanobu H., Tandai T., and Miura H., 2004. Multi-DOF
Flexible Robot Based on Tongue. In IEEE Int.
Conference on Robotics and Automation, New
Orleans, pp. 2673-2678.
Tsukagoshi H., Kitagawa A., and Segawa M., 2001.
Active Hose: an Artificial Elephant's Nose with
Maneuverability for Rescue Operation. In IEEE Int.
.Conference on Robotics and Automation, Seoul,
Korea, pp. 2454-2459.
Walker I.D. and Carreras C., 2003. Variation of the
Bending Locations within a Robot Manipulator. In
IEEE Int. Conference on Advanced Robotics,
Coimbra, Portugal, pp. 556-561.
Wilson J.F., Li D., Chen Z., and George Jr. R.T., 1993.
Flexible Robot Manipulators and Grippers: Relatives
of Elephant Trunks and Squid Tentacles. Robots and
Biological Systems: Toward a New Bionics?, pp.474-
479.
EXTENSION VERSUS BENDING FOR CONTINUUM ROBOTS
265
