AFFORDABLE DEEP OCEAN EXPLORATION WITH A
HOVERING AUTONOMOUS UNDERWATER VEHICLE
Odyssey IV: a 6000 meter rated, cruising and hovering AUV
V. Polidoro, S. Desset, C. Chryssostomidis, F. Hover, J. Morash, R. Damus
Autonomous Underwater Vehicle Laboratory
Massachusetts Institute of Technology Sea Grant Program
292 main street, E38-300, Cambridge, Massachusetts, 02139, USA
Keywords: AUV, deep ocean exploration, autonomous underwater vehicle, LBL, USBL, benthic, cold water corals.
Abstract: The Autonomous Underwater Vehicle Laboratory (AUV Lab) at The Massachusetts Institute of Technology
(MIT) is currently building and testing a new, general purpose and inexpensive 6000 meter capable
Hovering Autonomous Underwater Vehicle (HAUV), the ‘ODYSSEY IV class’. The vehicle is intended
for rapid deployments, potentially with minimal navigation, thus supporting episodic dives for exploratory
missions. For that, the vehicle is capable of fast dive times, short survey on bottom and simple navigation.
This vehicle has both high speed cruising and zero speed hovering capabilities, enabling it to perform both
broad area search missions and high resolution inspection missions with the same platform.
1 INTRODUCTION
1.1 Motivation
There is a lack of deep submergence vehicles
available to the ocean science community (National
Research Council of the National Academies). The
valuable resources that do exist, such as the manned
submersible Alvin, are under such heavy demand
that the scientists who compete to use the resources
are severely limited in the types of exploratory
missions they are able to pursue. The competition
for these assets limits scientists to working in areas
where there already exists enough knowledge from
previous missions that they are nearly guaranteed to
return with a good data product. As a result it is
difficult to secure funding to investigate new and
completely unexplored areas of the ocean. The
Odyssey IV class autonomous underwater vehicle
has been designed to perform quick and inexpensive
exploratory missions in areas where little or no
prior knowledge exists.
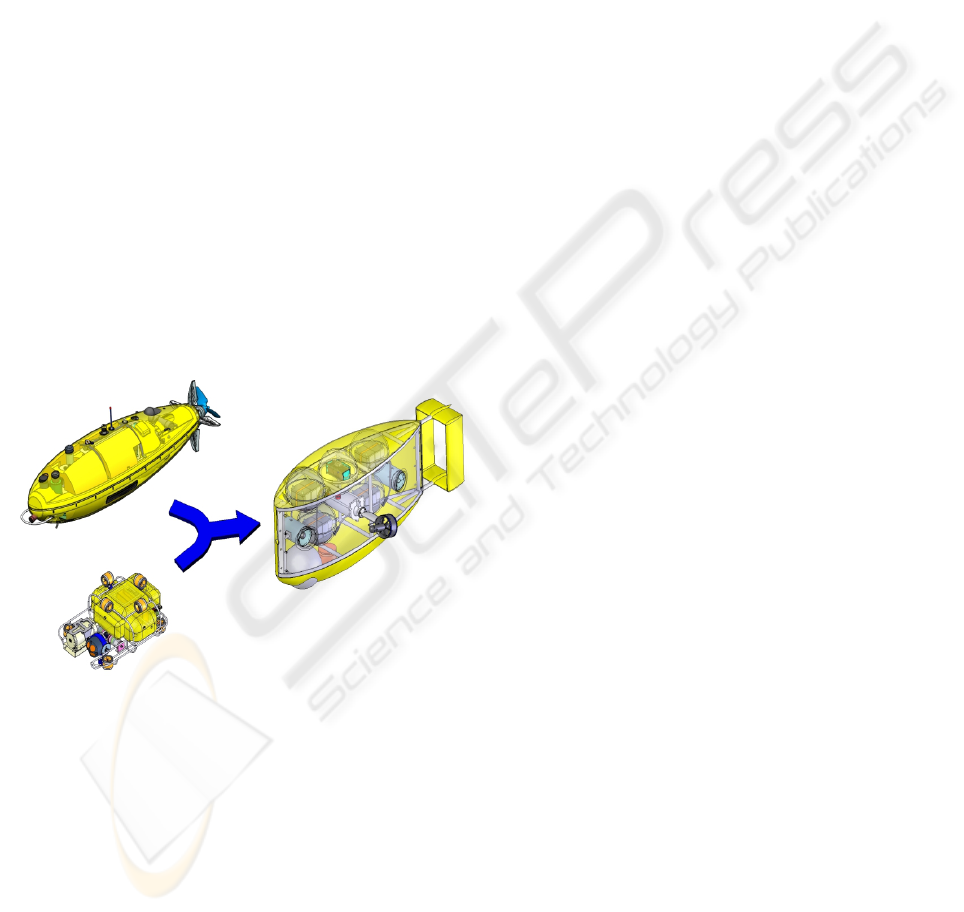
Figure 1: Design evolution towards an underwater
vehicle capable of both high speed cruising and zero
speed hovering. Top left Odyssey II, bottom left
ONR HAUV, right Odyssey IV
This vehicle is intended to be an inexpensive
asset that will be readily available for the deep
ocean science community, and can be replicated
easily. It is not meant to serve as a replacement for
the human occupied vehicles such as Alvin, Mir and
Nautilus submersibles, but rather can be used as an
inexpensive means of performing preliminary
surveys of areas that will potentially be explored by
the larger, more capable assets. The data product
from this platform will be substantially reduced
compared to the more expensive assets, however
the lower operating costs will enable this vehicle to
218
Polidoro V., Desset S., Chryssostomidis C., Hover F., Morash J. and Damus R. (2005).
AFFORDABLE DEEP OCEAN EXPLORATION WITH A HOVERING AUTONOMOUS UNDERWATER VEHICLE - Odyssey IV: a 6000 meter rated,
cruising and hovering AUV.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 218-223
DOI: 10.5220/0001177202180223
Copyright
c
SciTePress
perform exploratory missions that would not be
possible otherwise. Ultimately, it is our intent that
this vehicle will provide scientists with a less
expensive and more available means of
investigating new and unexplored areas in the deep
ocean, e.g., those with cold corals (Rogers, 2004).
1.2 Concept of Operations
In order to perform these quick exploratory
missions in a wide variety of sites, it is essential that
this platform be highly mobile so that multiple sites
can be investigated in a single day. Traditionally
deep diving vehicles such as Alvin and ABE use
external long baseline (LBL) acoustic networks for
navigation. The LBL systems are very time
consuming to deploy, survey in, and recover. The
ship time dedicated to the LBL system forces
scientists to dedicate at least several days to any site
of interest. The Odyssey IV class AUV is designed
to operate independently of these LBL networks in
order to investigate several different sites in a single
day. The Odyssey IV will be tracked with a ship-
borne ultra-short baseline (USBL) system and
navigation updates will be periodically sent via the
acoustic modem.
To further reduce the ship time required to
investigate any given site, the Odyssey IV is
designed to rapidly dive to depths as great as 6000
meters using a large external drop weight. This
descent weight and the highly streamlined body
enable the Odyssey IV to achieve vertical descent
speeds as high as 3.5 m/s, compared to the
maximum descent speed of 0.5 m/s for Alvin. The
round trip travel time to descend to a depth of 3000
meters would require approximately 30 minutes for
the Odyssey IV or at least 3 hours for Alvin. In
order to achieve these large descent speeds, it is
crucial that the vehicle be passively stable in tow.
Simply put, the body should travel smooth and
straight when being pulled to the bottom with a
large weight, without the use of any actuators.
Relying on an active control system to reject any
wild oscillatory motions on the descent would place
a high requirement on the bandwidth of the control
system, and would also waste energy which could
otherwise be spent collecting useful data at the
bottom. To achieve passive stability in tow, a
significant portion of the design effort was focused
on the hydrodynamics. The results of our
hydrodynamic experiments and simulations will be
presented later in this paper.
2 DESIGN
2.1 Lessons from Previous Vehicles
The initial design criteria for this vehicle was based
on the knowledge gained from previous experiences
in designing, building, and operating AUVs in the
field. This vehicle is designed to be manufactured
and operated at a low cost. By relaxing the packing
efficiency constraints, this design will save time and
cost by eliminating the need for highly customized
components that are required for extremely compact
designs.
ODYSSEY IV Specifications
Weight ~350 kg
Overall Length 2.6 m
Overall height 1.3 m
Overall width 1.3 m
Thrusters 4 x 1hp
Deep Sea Systems
Max Thrust per axis 400N
Surge velocity 3.5m/s
Heave velocity 1.0m/s
Sway velocity 0.5m/s
Yaw velocity
(hovering mode)
20 degrees per second
Dive speed
(with 10 kg weight)
>200m/min
Reserve buoyancy
(for payload)
30kg
Depth rating 6000 meters
Budgeted price
(excluding labor)
$170,000
Battery technology lithium ion
Onboard Energy
stored
4500 Wh
Power available 6000 W
Controlled DOF 4 (Surge, Heave, Sway,
Yaw)
Righting moment 120Nm at 45 degree
pitch
Drop weight 1 external for descent, 1
internal for ascent
The size of the vehicle is driven primarily by the
desired payload capacity and the use of commercial
off the shelf components. The size of the AUV is
limited by the typical deck size and crane capacity
for vessels of opportunity (Damus, 2004 - a). The
size of the vehicle adds to the cost of shipping,
which accounts for a substantial portion of the
operating budget.
AFFORDABLE DEEP OCEAN EXPLORATION WITH A HOVERING AUTONOMOUS UNDERWATER VEHICLE -
Odyssey IV: a 6000 meter rated, cruising and hovering AUV
219
A good AUV design needs to be very robust to
endure the damage that routinely occurs during the
launch and recovery process. The frame design
needs to be rigid, yet sparse to allow easy access to
the housings to perform regular maintenance. The
frame and fairing should be made of mostly plastic
to minimize the machining costs and corrosion
problems.
Good AUV designs are quiet electrically and
acoustically, in order to minimize the interference
with sensitive payload instruments such as sonars.
The AUV should contain enough battery power to
support a full day of operation with large payloads.
2.2 Cruising and Hovering
Cruising AUVs are generally torpedo shaped, and
are optimized for efficient surveys and long range
transit, see Figure 1. Cruising AUVs have very
limited maneuverability and therefore lack the
ability to make sharp turns, to stop for inspection, or
to travel at low speeds to closely follow a rough sea
floor. Obstacle avoidance becomes a major
problem for high speed cruising vehicles operating
near the sea floor (Damus, 2004 - b).
Hovering AUVs are highly maneuverable,
which makes them ideally suited for short range,
high resolution inspection tasks such as ship hull
inspections. Most hovering AUVs are not
streamlined, and therefore have low top speeds and
limited range. The limited range and speed of
hovering vehicles makes them ill suited for
searching wide areas.
The Odyssey IV was designed for both high
speed cruising and zero speed hovering. A highly
streamlined and maneuverable vehicle has a much
broader range of mission applications. The ability
to both cruise and hover makes the Odyssey IV a
well adapted platform for wide area searching and
for close area inspection, or possibly physical
sampling and manipulation tasks in the future.
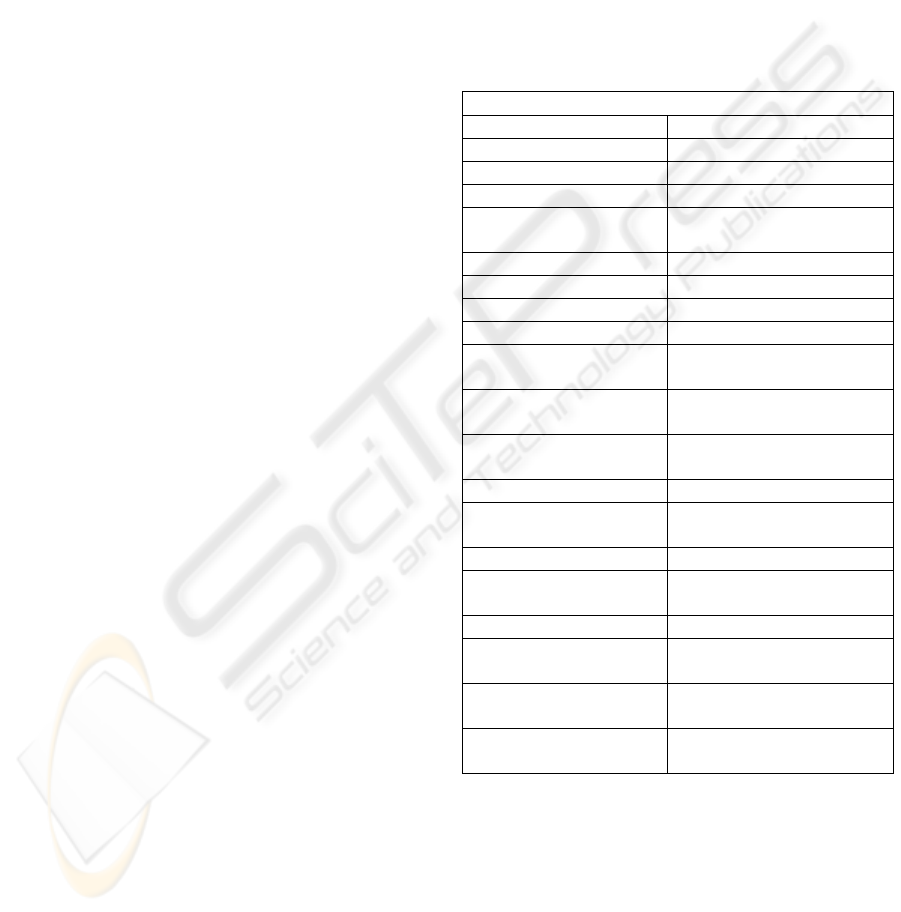
2.3 Symmetry and Stability
line of s
y
mmetr
y
center of buoyancy
and center of gravity
Figure 2: Odyssey IV has highly symmetric thruster
placement and a large hydrostatic righting moment
Asymmetries in the body shape and thruster
placement cause large torques on the body which
significantly increase the bandwidth and power
required by the control system. For example, a
strong coupling between surge and pitch in the
hydrodynamics wastes energy because pitch
actuation is required to achieve pure surge. Large
disturbances in the dynamics cause navigation
errors and discontinuities in the payload data.
Our previous hovering AUV could
independently control all six degrees of freedom in
the body motion, however the current and
foreseeable applications have only required the roll
and pitch to be maintained at zero (level flight).
The relatively fast dynamics on the rotational axes
places high demands on the control bandwidth and
authority. Achieving level flight on the roll and
pitch axes using passive hydrostatic stability
eliminates the need for actuators dedicated to those
axes. Reducing the number of actuators has
obvious benefits for the overall cost, size, and
power budget. A large hydrostatic righting moment
causes a high degree of passive stability. A large
hydrostatic righting moment is achieved by
maximizing the vertical separation between the
center of volume and center of mass, which was the
major design reason for the elongated vertical
shape.
ICINCO 2005 - ROBOTICS AND AUTOMATION
220
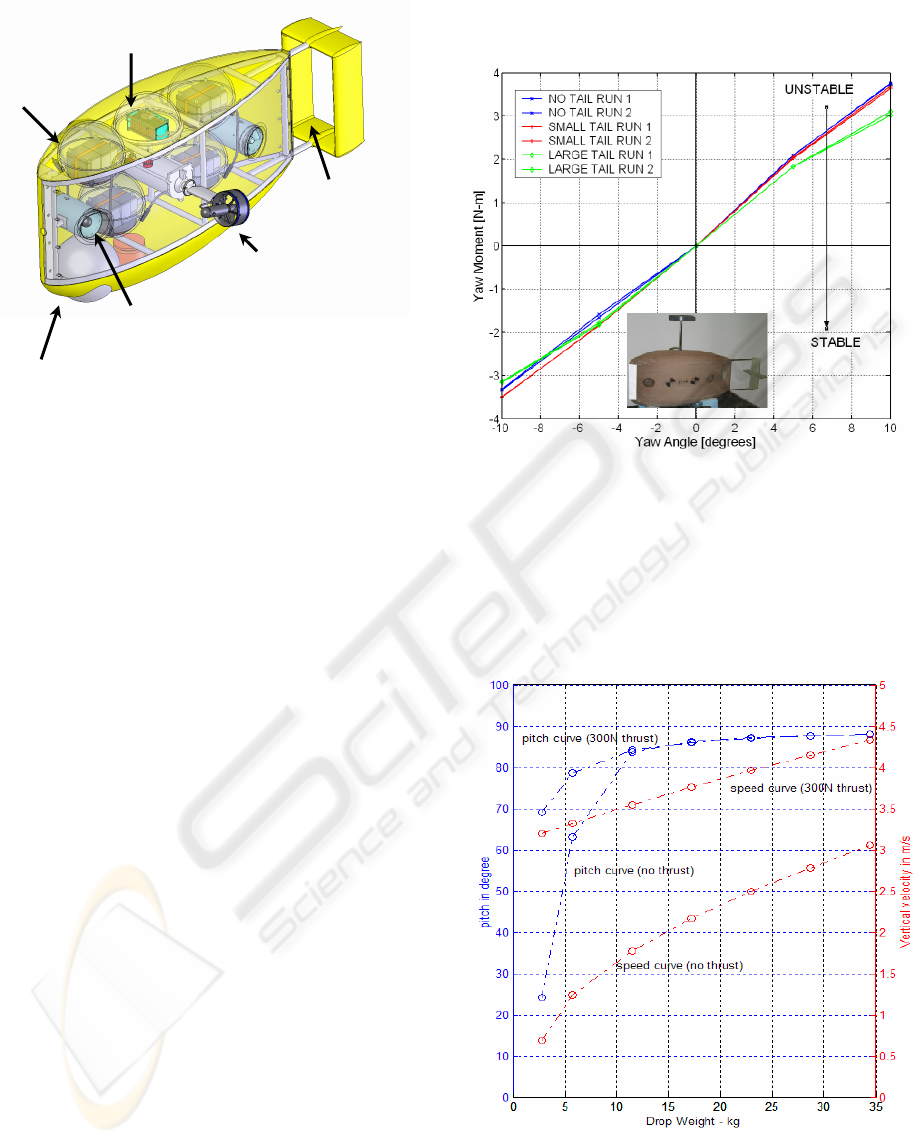
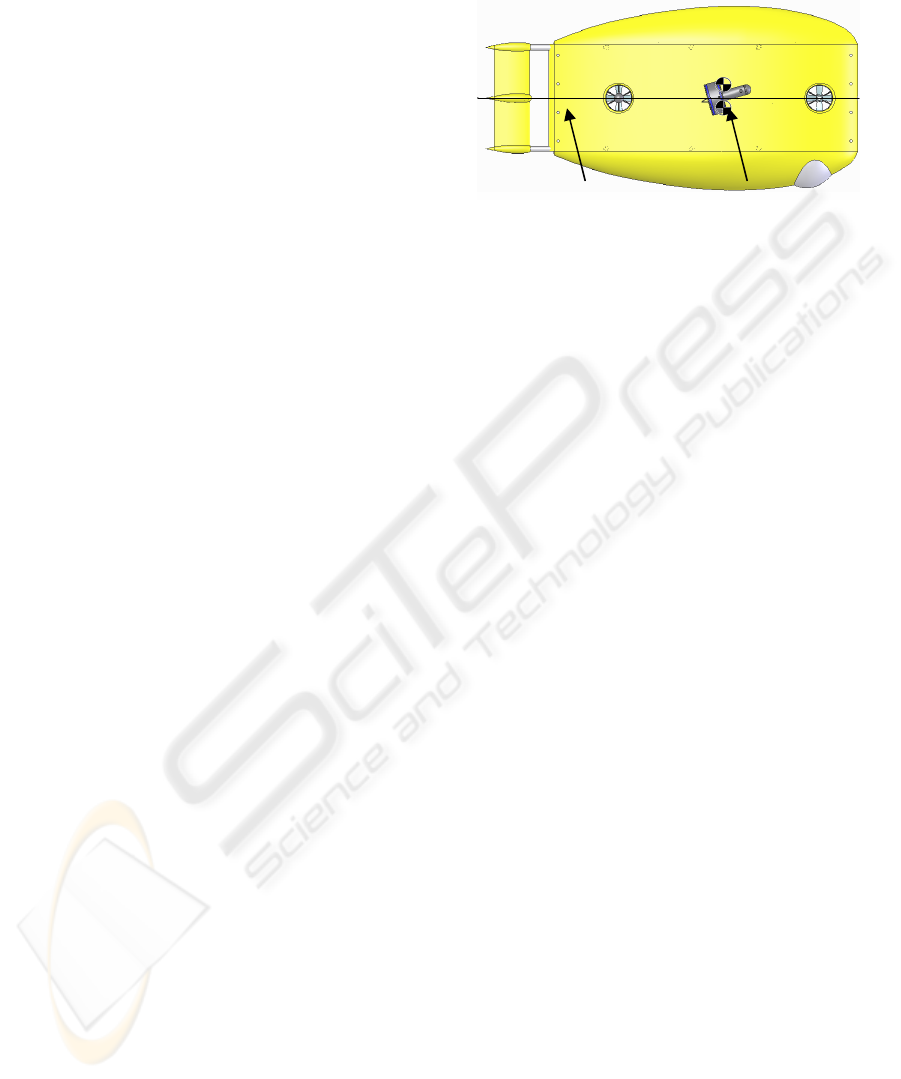
Figure 3: Simplified view illustrating the major
components of the Odyssey IV design
Four degree of freedom hovering capability is
enabled by passive stability and symmetric thruster
placement. Passive roll and pitch stability are
enabled by a large hydrostatic righting moment
(121Nm at 45 degree) and fixed lifting surfaces.
Symmetry in thruster placements reduces required
control bandwidth and decreases energy required
for station keeping. The rotating thruster unit
reduces the total number of thrusters, and therefore
enables more payload space and a more streamlined
shape. The location of the rotating thruster pair was
chosen to minimize the heave pitch coupling in the
hydrodynamics. The center of gravity has been
brought as close as possible to the line of symmetry
in the vertical direction, in order to minimize the
cross coupling between the body axes in the
hydrodynamics.
3 HYDRODYNAMICS
3.1 Range and Speed
The maximum surge velocity of the Odyssey IV is
3.5 m/s. The Odyssey IV has a range of 100 km at
1.1m/s for a hotel load of 100 Watts. This is an
estimation that accounts for the varying efficiency
of the thrusters at different thrust values and also for
the varying coefficient of drag of the streamlined
body as a function of Reynolds number. The
coefficient of drag for the streamlined body was
experimentally measured to be 0.1 at a Reynolds
number of 450,000. The hydrodynamic tests were
performed at the MIT Towing Tank facility using a
30% scale model.
main electronics housin
g
four battery
spheres
horizontal and
vertica
l stabilizers
rotatin
g
thruster
p
ai
r
cross bod
y
tunnel thrusters
p
olished sphere with
stereographic cameras
Figure 5: Yaw moment as a function of yaw angle for a
series of tail sizes. These results indicate that the tails
used for these test have insufficient area to make the
body passively stable. In order to achieve passive
stability, the rear vertical stabilizer will need to have at
least 400% more area. A new model tail is being
constructed, and another series of tests will be
performed to verify that the increased tail area will
enable the body to be passively stable in tow
Figure 4: Descent speed and pitch angle as a function
of drop weight mass. The weight is placed at the nose
to cause the body to pitch down to present a more
streamlined axis to the flow. The lift on the rear
stabilizers cause the body to pitch further nose down,
increasin
g
the s
p
eed and stabilit
y
of the dive.
AFFORDABLE DEEP OCEAN EXPLORATION WITH A HOVERING AUTONOMOUS UNDERWATER VEHICLE -
Odyssey IV: a 6000 meter rated, cruising and hovering AUV
221

4 NAVIGATION
ODYSSEY IV has a Doppler Velocity Log (DVL)
and an Attitude and Heading Reference System
(AHRS) to allow precise dead-reckoned navigation
(Whitcomb et al.). During normal cruising, vehicle
position will be estimated using an Extended
Kalman Filter, with accuracy slowly degrading at a
rate of 1-2 percent of distance travelled. However,
during deep dives, the DVL will be unable to
acquire bottom lock. The high pitch angle of the
body will point the transducer head away from the
sea floor, and the great depth of the water column
will often be beyond the instrument's maximum
sensing range. No DVL velocimetry means no
position estimates, so the vehicle will have to
suspend estimator operation and dive "lost".
Once ODYSSEY IV reaches its target altitude
above the sea floor, a subsequent pause to hover in
place will enable the science team at the surface to
precisely locate the survey start point. The vehicle
may be tracked using ship-borne USBL, or GPS-
enabled LBL buoys (Desset et al., 2003).
ODYSSEY IV is compatible with a fixed LBL net,
but we do not foresee frequent use of this mode of
navigation, due to the time and expense of
deployment. In quick inspection dives, the vehicle
need not perform continuous Earth-referenced
navigation, but may simply follow a pre-planned
dead-reckoned survey path relative to its start point.
In post-processing, the estimated vehicle path may
be overlaid on a map relative to the georeferenced
start point, or the path may be plotted directly from
surface tracking data. Experiments are planned to
test the feasibility of updating the AUV's self-
position estimate with surface tracking data via
acoustic modem, such that the on-board estimator
can work with Earth-referenced coordinates at all
times.
The possibility exists for rapid deployment of
multiple vehicles from a single vessel. Each vehicle
would be tracked during its dive and its survey start
point carefully noted, then each recovered after its
mission was completed.
5 PAYLOAD
The Odyssey IV is designed to be a flexible
instrument platform, with dedicated space to
support a variety of science payloads throughout the
lifetime of the vehicle. The high maneuverability,
substantial depth rating, low cost and easy
deployment of this AUV will make it a good choice
for many different scientific inquiries. Odyssey IV
has a generous 100 liters of dedicated payload
space, and has sufficient reserve buoyancy to carry
30 kg (wet) of additional instrumentation. The main
electronics housing has three identical payload
ports, each able to deliver up to 2kW peak power
from the main battery bus (accounting first for
thrust demands). Each payload port can be wired
internally for 10/100 Ethernet, RS-232/422/485
serial, and/or general purpose analog and digital
I/O, with optically isolated connections to the
PC/104-based main vehicle computer.
The first payload planned for Odyssey IV
integration is a stereographic digital camera system.
A pair of six-megapixel color cameras will share a
polished optical viewport in spherical glass pressure
housing. The remaining space inside the camera
sphere will be occupied by the lighting electronics.
These will support one or more strobes (roughly
200 J each), for high-quality still.
Stereo imagery from this camera, displayed
through an appropriate stereoscopic device, will
enable scientific users to feel as though they are
flying over the seafloor along the track of the AUV,
with sharp full-color images to examine. After
careful calibration of the camera, the raw data may
be post-processed into a three-dimensional
photomosaic, allowing precise measurements to be
made of high-relief targets (typically distorted in 2-
D images) (Pizarro et al., 2004).
The other payload sensor that will likely be
included in the first generation Odyssey IV is the
C3D Sonar Imaging System from Benthos. The
C3D system functions both as a sidescan sonar and
also as a high resolution bathymetric system. The
C3D would be ideally suited for systematically
searching relatively wide areas of the sea floor.
Targets identified with the C3D sonar could be
inspected more closely with the sterographic
cameras.
As for more complex instruments, past
experience has shown that the 'smart sensor' is a
very effective approach to AUV payload
development. Despite the additional engineering
required, a 'smart sensor' design allows independent
construction and testing of the complete subsystem
on the bench (and even in limited field
deployments) prior to installation in the AUV. The
on-board computer is typically responsible for data
collection (triggering sensor sampling) and data
storage; some devices even perform real-time
interpretation (e.g., online CAD/CAC in MCM
sidescan sonar applications). Examples of smart
ICINCO 2005 - ROBOTICS AND AUTOMATION
222

sensor subsystems integrated in MIT Sea Grant
AUVs include a synthetic aperture sonar (Edwards
et al., 2001), mass spectrometer (R. Camilli), high
resolution digital still camera and high-frequency
sidescan sonar (J. Morash).
Future payloads for Odyssey IV may include
solid or water sampling devices. The logical goal of
a hovering vehicle is the ability to hold perfectly
still - scientists might take advantage of this ability
by requesting a returned sample from the seafloor.
Simple corers, sediment traps, and biological "slurp
guns" have been tested successfully on other
vehicles, most notably ROVs (Paull et al.,
2001)(Salamy et al., 2001). The high power density
available to Odyssey IV payloads may enable more
powerful samplers such as chipping hammers for
sampling rock or coral.
ACKNOWLEDGMENTS
The authors would like to acknowledge the support
of their colleagues at the MIT Sea Grant Program,
the MIT Ocean Engineering Department, the MIT
Towing Tank, and the MIT Propeller Tunnel. The
MIT Sea Grant Program supported this work under
grant number NA-16RG2255.
REFERENCES
National Research Council of the National Academies,
“Future needs in deep submergence science”, The
National Academies press,
http://books.nap.edu/catalog/10854.html, Library of
Congress Catalog Number 2004101150.
A. Rogers, “The biology, ecology and vulnerability of
deep-water coral reefs”, British Antarctic survey,
2004.
R. Damus, “Establishing the utility of AUVs in
monitoring Fisheries Habitat”, MIT Sea Grant,
SG04-03, September 2004.
R. Damus, “Systematic Coverage and Inspection of
Underwater Archaeological Sites Using AUVs”, MIT
Sea Grant, SG04-02, August 2004.
L. Whitcomb, D. Yoerger, H. Singh, “Advances in
Doppler-Based Navigation of Underwater Robotic
Vehicles”.
S. Desset, R. Damus, J. Morash, C. Bechaz, “Use of GIBs
in AUVs for Underwater Archeology”, Sea
Technology, pp. 22-27, December 2003.
J. R. Edwards, H. Schmidt and K. LePage, “Bistatic
synthetic aperture target detection and imaging with
an AUV”, IEEE Journal of Oceanic Engineering Vol.
26 (4): pp.690-699, 2001.
R. Camilli, “Kemonaut: An Odyssey Class AUV Platform
for the NEREUS Underwater Mass Spectrometer”,
unpublished.
J. Morash, “Adapting a survey class AUV for high
resolution seafloor mapping”, in press.
E. Belcher, W. Hanot, J. Burch, “Dual-Frequency
Identification Sonar (DIDSON)”, Proceedings of the
2002 International Symposium on Underwater
Technology, pp.187-192, 16-19 April 2002.
R. Hansen, P. Andersen, “A 3-D underwater acoustic
camera – properties and applications”, P. Tortoli and
L. Masotti, editors, Acoustical Imaging, pp. 607-611,
Plenum Press, 1996.
O. Pizarro, R. Eustice, and H. Singh, “Large Area 3D
Reconstructions from Underwater Surveys”,
OCEANS 2004 MTS/IEEE Conference and
Exhibition, in press.
http://www.whoi.edu/cms/files/reustice/2004/9/ocean
s2004_531.pdf
Paull, C.K., S. Stratton, M. Conway, K. Brekke, T.C.
Dawe, N. Maher, and W. Ussler III (2001). “Deep
sea vibracoring system improves ROV sampling
capability”. EOS, Transactions, 82: 325-326.
Salamy, K.A., M. Chaffey, J. Erickson, D. Au, T.C.
OReilly, and D. Stakes (2001). “Rock coring
technology on the Juan de Fuca” plate with the
MBARI ROV Tiburon. In: Oceanology International,
http://www.mbari.org/staff/salamy/Presentations/OIA
merics2001_Coring_Sled_Paper.pdf.
AFFORDABLE DEEP OCEAN EXPLORATION WITH A HOVERING AUTONOMOUS UNDERWATER VEHICLE -
Odyssey IV: a 6000 meter rated, cruising and hovering AUV
223
