
COMBINING TWO METHODS TO ACCURATELY ESTIMATE
DENSE DISPARITY MAPS
Agust
´
ın Salgado and Javier S
´
anchez
Computer Science Department, University of Las Palmas de Gran Canaria
35017 Las Palmas de Gran Canaria, Spain
Keywords:
disparity map, optical flow, stereoscopic vision.
Abstract:
The aim of this work is to put together two methods in order to improve the solutions for the problem of
3D geometry reconstruction from a stereoscopic pair of images. We use a method that we have developed in
recent works which is based on an energy minimisation technique. This energy yields a partial differential
equation (PDE) and is well suited for accurately estimating the disparity maps. One of the problems of this
kind of techniques is that it depends strongly on the initial approximation. For this reason we have used a
method based on graph–cuts which has demonstrated to obtain good initial guess.
1 INTRODUCTION
In this paper we have put together two methods for
computing disparity maps. The first one is based
on graph–cuts energy minimisation (Kolmogorov et
al., 2001), (Boykov et al., 2004). This method has
demonstrated to give good results in integer precision
which is enough for a set of applications. If we are
looking for better accuracy then it is necessary to use
a different technique. In this case we use a method
that we have developed recently and which is de-
scribed in paper (Alvarez et al., 2002). We have also
implemented a similar method for optical flow esti-
mation which is explained in (Alvarez et al., 2000).
These methods are based on an energy minimisation
approach. When we minimize the energy we obtain
a system of PDEs which are then embedded into a
gradient descent method to obtain the solution. One
of the problems of these methods is that they need a
good initial approximation in order to obtain a pre-
cise solution. In previous works we have always used
a correlation based technique to compute this approx-
imation. Comparing graph–cuts and correlation based
methods the first one provides more stable solutions.
In this paper we show that the combination of
graph–cuts and PDE based methods improves the ac-
curacy of the solution with respect to other initial ap-
proximation techniques such as correlation. In the
experimental results we compare numerically the dif-
ferent approaches through a synthetic sequence of a
cylinder and also we show several results for a real
stereoscopic pair of images – the Tsukuba sequence.
2 GRAPH-CUTS METHOD
The minimum cut/maximum flow algorithms on
graphs emerged as an increasingly useful tool for ex-
act or approximate energy minimisation in low-level
vision. Stereo is a classical vision problem where
graph-based energy minimisation methods have been
successfully applied. The goal of stereo is to com-
pute the correspondence between pixels of two or
more images of the same scene obtained by cameras
with slightly different view points. Any stereo im-
ages of multi-depth objects contain occluded pixels.
The presence of occlusions adds significant technical
difficulties to the problem of stereo.
The energy function for a configuration f is of the
form
E(f) = E
data
(f) + E
occ
(f) + E
smooth
(f) (1)
The three terms here include
• a data term E
data
, which results from the differ-
ences in intensity between corresponding pixels;
• a occlusion term E
occ
, which imposes a penalty for
making a pixel occluded; and
210
Salgado A. and Sánchez J. (2005).
COMBINING TWO METHODS TO ACCURATELY ESTIMATE DENSE DISPARITY MAPS.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 210-214
DOI: 10.5220/0001178102100214
Copyright
c
SciTePress

• a smoothness term E
smooth
, which makes neigh-
boring pixels in the same image tend to have simi-
lar disparities.
3 ENERGY BASED METHOD
The method we use in this paper is energy based. It
has the following features:
• We consider a weakly calibrated stereoscopic sys-
tem. The stereoscopic system is not calibrated and
only the knowledge of the so-called fundamental
matrix is known.
• This method addresses the problem of accurately
determining the dense disparity map while regular-
izing it along the contours of the gray level image
and inhibiting smoothing across the image discon-
tinuities.
• We apply a multi–resolution scheme in order to
avoid convergence to irrelevant minima.
The energy function that we propose for 3D geom-
etry reconstruction is as follows:
E(λ) =
Z
(I
l
(x) − I
r
(x + h(λ(x)))
2
dx
+ C
Z
Φ (∇I
l
, ∇λ) dx. (2)
In this case we have a matching function, h, that
depends on a scalar function, λ. This scalar function
represents the displacement of pixels on the epipolar
lines. In this case Φ (∇I
l
, ∇λ) = ∇λ
t
·D (∇I
l
)·∇λ,
D (I
l
∇) is a regularized projection matrix perpen-
dicular to ∇I
l
,
D (∇I
l
) =
1
|∇I
l
|
2
+ 2υ
2
·
(
∂I
l
∂y
−∂I
l
∂x
∂I
l
∂y
−∂I
l
∂x
t
+ υ
2
Id
)
(3)
where Id denotes the identity matrix. This projec-
tion has been introduced by Nagel and Enkelmann in
the context of optical flow estimation.
After minimising this energy and applying a
gradient descent method we obtain the following
diffusion–reaction PDE:
∂λ
∂t
= C div (D (∇I
l
) ∇λ)
+
I
l
(x) − I
λ
r
(x)
·
−b
∂I
r
∂x
λ
(x)
√
a
2
+ b
2
+
a
∂I
r
∂y
λ
(x)
√
a
2
+ b
2
(4)
The details of this method could be found in paper
(Alvarez et al., 2002).
4 COMBINING GRAPH-CUTS
AND STEREOFLOW METHOD
In this section, we explain how the graph-cuts (kz2)
and the previous explained PDE (stereoFlow) meth-
ods work together for estimating the dense disparity
map. The graph-cuts method labels the image obtain-
ing a disparity map in integer precision. The stere-
oFlow method obtains a disparity map in float preci-
sion. To improve the perfomance of our method, we
do not apply the graph-cuts method in the input pair
of images. Using a pyramidal approach we scale the
image ”n” times. The number of scales is a parameter
defined by user.
The basic idea of embedding our method in a pyra-
midal approach is as follows: we replace the images
I
l
and I
r
by I
σ
l
:= Z(I
l
) and I
σ
r
:= Z(I
r
), where
Z(. . .) is the zoom operator. Thus, we do a 2X
zoom over each image. We start with a large ini-
tial scale σ
0
. Next, we choose a number of scales
σ
n
< σ
n−1
< ··· < σ
0
and for each scale σ
i
we do
a zoom. When we reach last scale (σ
n
), we compute
the disparity λ
σ
n
with kz2 or with a correlation based
technique. Thus, we have an initial approximation.
Next, we compute the disparity λ
σ
i
as the asymptotic
state of the above PDE with initial data λ
σ
i+1
. So, the
disparity of I
l
and I
r
is defined by λ
σ
0
. In Fig. 1, we
see an example how this algorithm works.
Both correlation–based and graph-cuts methods
spend much CPU time to compute the disparity maps.
As we can see in Fig. 1, the kz2 is applied at the
smallest size of the images, so we assure that it is car-
ried out faster than at larger images. Then the stere-
oFlow technique is applied in the rest of the scales.
5 EXPERIMENTAL RESULTS
In this section we present a comparison between the
graph–cuts stereo method (kz2) and the combina-
tion of our method (stereoFlow) with different ini-
tial approximation (such as kz2 or correlation based
technique). We have used two datasets in our tests:
a stereoscopic pair from the University of Tsukuba
(Fig. 2) and a stereoscopic pair of a synthetic cylin-
der (Fig. 6).
In paper (Kolmogorov et al., 2001), the head of
Tsukuba was used to show the results obtained with
graph-cuts stereo method (kz2) in comparison with
similar methods. We have used the same dataset to
COMBINING TWO METHODS TO ACCURATELY ESTIMATE DENSE DISPARITY MAPS
211
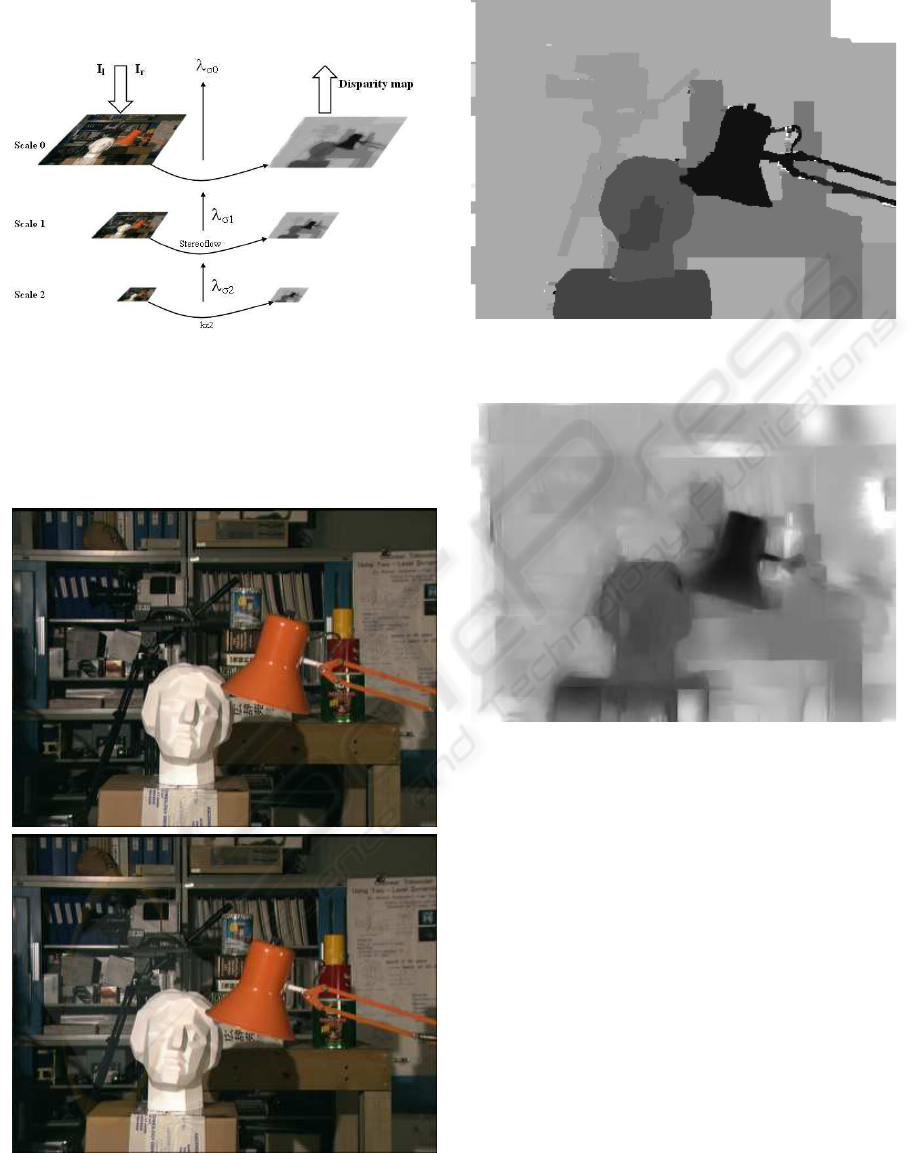
Figure 1: Combination of kz2 and stereoFlow algorithms
Figure 2: Stereoscopic pair for the Tsubuka sequence.
Figure 3: Disparity map obtained through kz2.
Figure 4: Disparity map obtained through correlation +
stereoflow.
show how our algorithm improves the initial approxi-
mation given by kz2 (with/without scales).
The number of zooms defined by user depends on
the scene motion. An overzooming (or overscaled)
gives us a bad initial approximation, so our method
converges to irrelevant local minima. In Fig. 3 we can
see the disparity map obtained by kz2. Both correla-
tion based techniques and graph-cuts methods spend
much CPU time so we must decide between a few or
large number of scales.
We have tested our method using the synthetic
cylinder dataset to compare its accuracy with differ-
ent initial approximations. For the initial value we
consider two possibilities. The first one is to use the
result of a simple classic method for estimating the
disparity, for instance a correlation based technique.
The second one is to use a graph-cuts method which
gives us a disparity map in integer precision.
We have computed the euclidean error between the
ICINCO 2005 - ROBOTICS AND AUTOMATION
212

Figure 5: Disparity map obtained through kz2 + stereoflow.
Figure 6: Stereoscopic pair for the synthetic cylinder.
Table 1: Euclidean error obtained with cylinder images for
various tests.
Euclidean error
Method Disparity range
Scale=0 Scale=1
kz2 0.24 0.24
Corr+StereoFlow 0.22 0.21
kz2+StereoFlow 0.20 0.19
output of our algorithm and the ideal disparity map,
to see the accuracy of our method. In the table 1
we show the results obtained by the combination of
a correlation–based method with stereoFlow, the re-
sult for the kz2 and the result for the combination of
kz2 and stereoFlow.
From these results we may appreciate that the com-
bination of correlation and stereoFlow method gives
better results than the kz2 method and that the com-
bination of kz2 and stereoFlow improves the solution
of the correlation–based one.
In this table we compare the solution for two dif-
ferent configurations: In the first one the pyramidal
scheme is reduced to only one scale (Scale = 0) and
in the second one we use two scales (Scale = 1). If we
compare them, we may conclude that the use of the
pyramidal approach improves the solutions for both
methods (correlation + stereoFlow and kz2 + stere-
oFlow) and that the result for kz2 + stereoFlow is still
better than using the correlation–based method.
In figures 8 and 10, we see the visual results for the
synthetic cylinder obtained for each method. Look-
ing at the figures the result obtained with the latter is
smoother and more accurate. All the experimental re-
sults are improved with the combined method and in
most cases the improvement is greater than a 16% for
the euclidean error for the same scale.
6 CONCLUSIONS
In this work we have combined two different tech-
niques on disparity maps estimation in order to obtain
more accurate and reliable solutions. We have used
a pixel precision method based on graph–cuts as ini-
tialization for another method based on PDEs. The
latter depends on an initial approximation which is
supported by the former one. The solution we obtain
is in float precision and the accuracy is considerably
improved. We have compared the combination of the
PDE and graph–cuts with the combination of the PDE
and a correlation–based method. We may conclude
that the use of the kz2 at the first stage provides better
results than the correlation method.
COMBINING TWO METHODS TO ACCURATELY ESTIMATE DENSE DISPARITY MAPS
213

Figure 7: Ideal disparity map for the cylinder images.
Figure 8: Disparity map obtained through kz2.
Figure 9: Disparity map obtained through correlation +
stereoFlow.
Figure 10: Disparity map obtained through kz2 + stere-
oFlow.
REFERENCES
L. Alvarez, R. Deriche, J. S
´
anchez and J. Weickert. Dense
Disparity Map Estimation Respecting Image Discon-
tinuities: A PDE and Scale-Space Based Approach.
Journal of Visual Communication and Image Repre-
sentation, 13, pp. 3-21. 2002.
L. Alvarez J. Weickert and J. S
´
anchez. Reliable Estimation
of Dense Optical Flow Fields with Large Displace-
ments. International Journal of Computer Vision, 39,
pp. 41-56, 2000.
V. Kolmogorov and R. Zabih, Computing Visual Corre-
spondence with Occlusions using Graph Cuts. In In-
ternational Conference on Computer Vision (ICCV),
July 2001.
Y. Boykov and V. Kolmogorov, An Experimental Com-
parison of Min-Cut/Max-Flow Algorithms for Energy
Minimization in Vision. In IEEE Transactions on Pat-
tern Analysis and Machine Intelligence (PAMI), Sep-
tember 2004.
ICINCO 2005 - ROBOTICS AND AUTOMATION
214
