
A PARAMETERIZED POLYHEDRA APPROACH FOR THE
EXPLICIT ROBUST MODEL PREDICTIVE CONTROL
Sorin Olaru
Supelec
3 rue Joliot Curie, Gif-sur-Yvette, France
Didier Dumur
Supelec
3 rue Joliot Curie, Gif-sur-Yvette, France
Keywords:
Predictive control, constraints, parameterized polyhedra, multiparametric optimization.
Abstract:
The paper considers the discrete-time linear time-invariant systems affected by input disturbances. The goal is
to construct the robust model predictive control (RMPC) law taking into account the constraints existence from
the design stage. The explicit formulation of the controller is found by exploiting the fact that the optimum of
a min-max multi-parametric program is placed on the parameterized vertices of a parameterized polyhedron.
As these vertices have specific validity domains, the control law has the form of a piecewise linear function of
the current state. Its evaluation replaces the time-consuming on-line optimization problems.
1 INTRODUCTION
Model Predictive Control (MPC) enjoys a remarkable
reputation among the control design techniques for
process industries. In the beginnings, practitioners
used MPC in the unconstrained closed forms due to
its simplicity and versatility and dealt with the con-
straints violation a posteriori. In the ’90s, theoreti-
cians proved that constraints could be included at the
design stage with excellent results towards the fea-
sibility, stability or robustness. The inconvenience,
which represented also an impasse in applying the
constrained predictive control to high sampling rate
systems, was the relative high complexity of the op-
timization problem to be solved at each sampling pe-
riod. Lately, the constrained MPC paradigm was re-
formulated in terms of LMI (Kothare et al., 1996)
with a reduction of computational time but the class
of system to be controlled was still limited.
An improvement from the on-line computational
point of view can be achieved if the explicit solution
of the MPC optimization problem is formulated. In
this way, at each sampling time, a piecewise linear
function has to be evaluated. In fact the MPC strat-
egy is based on a multi-parametric optimization prob-
lem as both the global optimum and the set of con-
straints are parameter dependent. In the nominal case
corresponding with a quadratic optimization problem
and linear constraints, the explicit solution was inves-
tigated with success using an algebraic approach in
(Bemporad et al., 2002b), geometrical arguments in
(Seron et al., 2002), (Olaru and Dumur, 2004) and
lately dynamic programming (Goodwin et al., 2004).
In the case of robust MPC, the explicit solution is
somehow more difficult to achieve as the optimization
problem is based on a min-max cost function. It was
successfully tackled in (Bemporad et al., 2001) but
the alternative methods do not present similar solu-
tions so far. The current work is trying to compensate
this setback through an explicit solution for the ro-
bust MPC by geometrical base. The method is based
on the concept of parameterized polyhedra (Loechner
and Wilde, 1997) and their correspondent parameter-
ized vertices where the optimal solution is founded.
2 ROBUST MPC FORMULATION
Consider the MPC problem formulated for a discrete-
time linear time-invariant system affected by an input
disturbance:
x
t+1
= Ax
t
+ Bu
t
+ Ev
t
(1)
and subject to a set of linear constraints:
Cx
t
+ D u
t
≤ d (2)
The vectors x
t
∈ R
n
and u
t
∈ R
m
represent the
states and inputs while v
t
∈ R
p
is the unknown vector
of disturbances lying inside a polytope containing the
3
Olaru S. and Dumur D. (2005).
A PARAMETERIZED POLYHEDRA APPROACH FOR THE EXPLICIT ROBUST MODEL PREDICTIVE CONTROL.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Signal Processing, Systems Modeling and
Control, pages 3-10
DOI: 10.5220/0001178400030010
Copyright
c
SciTePress

origin defined by a set of linear constraints:
V = {v |Mv 6 l; l > 0} (3)
In the following, the pair (A, B) is supposed to be sta-
bilizable and it is assumed that the full measurement
of the current state is available at each time t.
MPC is an optimization based technique. In oppo-
sition to the nominal case where quadratic cost func-
tions are used (Maciejowski, 2002), (Rossiter, 2003),
in the case of models affected by disturbance, a min-
max optimization is preferred, resulting a RMPC for-
mulation:
min
u
t
,...,u
t+N
u
−1
max
v
t
,...,v
t+N−1
S
P
λ
(x
t+N|t
)+
+
N−1
X
k=1
Qx
t+k|t
∞
+
N
u
−1
X
k=0
kRu
t+k
k
∞
))
(4)
s.t.: Cx
t+k|t
+ D u
t+k
6 d, k = 1, . . . , N
Mv
t+k
6 l, k = 0, . . . N − 1
x
t+k+1|t
= Ax
t+k|t
+ Bu
t+k
+ Ev
t+k
,
k > 0, x
t+N|t
∈ P
λ
(5)
with Q, R weighting matrices,k∗k
∞
,
max
i=1,...,r
∗
i
, where ∗
i
is the i-th element
of the vector ∗ ∈ R
r
. The state predictions x
t+k|t
are obtained based on the current state vector x
t
and
by applying the input sequence u
t
, . . . , u
t+Nu−1
, to
model (1) over a control horizon. Note that, in the
general case, the control (N
u
) and the prediction (N )
horizons might be different if the control vector has
a fix formulation for N
u
6 k 6 N. Conversely,
the disturbance sequence v
t
, . . . , v
t+N−1
affects the
prediction over the whole prediction horizon.
The stability of the MPC scheme depends on the
chosen horizons and on the terminal cost. In order to
guarantee the stability, an infinite prediction horizon
should be used. Such a choice transforms (4)-(5) in an
intractable problem. The solution is then to choose a
finite prediction horizon and to consider that after this
point the system trajectory is brought inside a posi-
tively invariant set, P , that can be computed off-line
(Kerrigan, 2000). To this terminal region a function
S
P
λ
(x) can be associated, appearing in (4) as a termi-
nal cost penalizing the evolution from N to ∞.
Applying a receding horizon strategy the optimiza-
tion (4)-(5) is solved at each sampling time t us-
ing the measured state vector x
t
(playing the role
of parameter for the optimization). If k
∗
u
(x
t
) =
u
∗
t
, . . . , u
∗
t+N
u
−1
is the solution to (4)-(5), the in-
put applied to the system (1) is the first value of this
sequence k
∗
u
(x
t
) such that u
t
= u
∗
t
, the other values
are abandoned and the procedure is restarted.
A special concern must be given to the choice of the
control horizon. Indeed, this parameter is sensitive
as it reflects the number of degrees of freedom avail-
able to ensure the constraints fulfillment for all possi-
ble combinations of disturbances. On the other hand,
with less control alternatives the computational load
is diminished. In the robust MPC case, the control
horizon is generally equal with the prediction horizon
N
u
= N , as the cumulative effect of the worst case
disturbances needs an important control counterpart.
min
u
t
max
v
t
min
u
t+1
. . . min
u
t+N
u
−1
max
v
t+N
u
,..,v
t+N−1
S
P
λ
(x
t+N|t
) +
N−1
k=1
Qx
t+k|t
∞
+
N
u
−1
k=0
Ru
t+k
∞
. . .
(6)
or equivalently in a ”closed loop” formulation:
min
u
t
kRu
t
k
∞
+ max
v
t
Qx
t+1|t
∞
+
+ min
u
t+1
{. . . + min
u
t+N
u
−1
Ru
t+N
u
−1
∞
+
+ max
v
t+N
u
−1
,...,v
t+N
S
P
λ
(x
t+N|t
)+
N−1
k=N
u
Qx
t+k|t
∞
· · ·
3 ROBUST MPC AS A MULTI-
PARAMETRIC OPTIMIZATION
The robust model predictive control problem formu-
lated before is based on the on-line solving of the as-
sociated min-max optimization problem:
min
k
u
max
k
υ
J(x
t
, k
u
, k
υ
)
subj. to F
in
k
u
+ G
in
k
υ
6 h
in
+ H
in
x
t
(7)
with k
u
=
u
t
, .., u
t+N
u
−1
, k
υ
= {v
t
, .., v
t+N−1
}
and a convex cost function J(x
t
, k
u
, k
υ
) based on a
sum of ∞-norm terms. F
in
, G
in
, h
in
, H
in
translate
in a compact form the set of constraints in (5). Both
the cost function and the set of constraints depend on
the current state vector x
t
which plays the role of a
parameter. This parameterization of the optimization
problem to be solved at each sampling time trans-
forms the on-line location of the minimum argument
in a computationally prohibitive task. The alternative
solution is to explicitly formulate off-line the optimal
solution k
∗
u
(x
t
) in terms of a piecewise linear func-
tion and further evaluate this function on-line.
3.1 The inner optimization
The influence of the disturbances in the form (7) can
be examined by the reconsideration of the extremal
possible combination of vertices in V for each pre-
diction stage completing the sequence k
υ
.
v
t
∈ V ⊂ R
p
⇒ k
υ
∈ V
N
⊂ R
N×p
(8)
Remark: For the inner optimization, the set of con-
straints is constituted only by the inequalities defining
ICINCO 2005 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
4
the polyhedral domain as in (3) and the constraints
imposed by the system dynamics in (1). This fact
is transparent from the definition of the predictive
control law, which allows any combination of distur-
bances satisfying (3). If one of these combinations is
not allowed by the set of constraints in (7), it means
in fact that the MPC law is infeasible.
Taking into account the convexity of the objective
function and the previous remark, it can be concluded
that the optimum for the inner optimization in (7) is
on the border of the feasible domain, more precisely
on one of the vertices of V
N
as long as it is defined
as a polytope. Thus (7) becomes:
min
k
u
max
v
k
υ
J(x
t
, k
u
, k
υ
l
)
subj. to F
in
k
u
+ G
in
k
υ
l
6 h
in
+ H
in
x
t
l ∈ L, k
υ
l
∈ V
N
(9)
with L = {1, 2, . . . , N
v
} and N
v
the number of ver-
tices in V
N
.
This means that the inner optimization in (7) will
act only on the set of vertices in V
N
. Further this
may be written as:
min
k
u
,µ
µ
subj. to F
in
k
u
+ G
in
k
υ
l
6 h
in
+ H
in
x
t
J(x
t
, k
u
, k
υ
l
) 6 µ
l ∈ L, k
υ
l
∈ V
N
(10)
3.2 The outer optimization problem
An impediment in finding the explicit solution for (7)
is the expression of the cost function, given as a col-
lection of ∞-norm terms. In order to avoid the in-
herent difficulty of handling it, an equivalent linear
program (LP) (Kerrigan, 2004) formulation must be
achieved based on the idea that each ∞-norm term
can be bounded. The optimization problem is equiva-
lent with the minimization of the sum of these bounds.
This is resumed by the following result where the cost
function is considered as a sum of ∞-norm terms lin-
ear in the vector of unknowns x and parameters p (to
identify them, one can observe that for a fix sequence
k
v
= ct and noting x = k
u
and p = x
t
in (7), the
cost function is a sum of kS
i
x + P
i
p + s
i
k
∞
terms,
with S
i
, P
i
, s
i
defined after case).
Proposition 1. The formulations (1) and (2) are
equivalent:
(1)
K(p) = min
x
J(x, p) = min
x
n
i=1
kS
i
x + P
i
p + s
i
k
∞
subject to A
in
x 6 b
in
+ B
in
p
(2)
K(p) = min
ρ,
{
σ
i
}
,x
ρ
subject to
- 1σ
i
6 S
i
x + P
i
p + s
i
6 1σ
i
, 1 6 i 6 n
n
i=1
σ
i
6 ρ
A
in
x 6 b
in
+ B
in
p
where σ
i
, ρ ∈ R and 1 is a vector with unit entries.
3.3 RMPC multi-parametric
optimization problem
With the previous two transformations, the optimiza-
tion (7) can be rewritten as:
k
u
∗ (x
t
) = min
ρ,k
u
,
{
σ
j
i
}
ρ
- 1σ
j
i
6 S
i
k
u
+ P
i
x
t
+ W
i
k
υ
l
+ s
i
6 1σ
j
i
,
1 6 i 6 n, 1 6 l 6 N
v
n
X
i=1
σ
1
i
.
.
.
n
X
i=1
σ
N
v
i
6 1ρ
F
in
k
u
+ G
in
k
υ
l
6 h
in
+ H
in
x
t
,
1 6 l 6 N
v
(11)
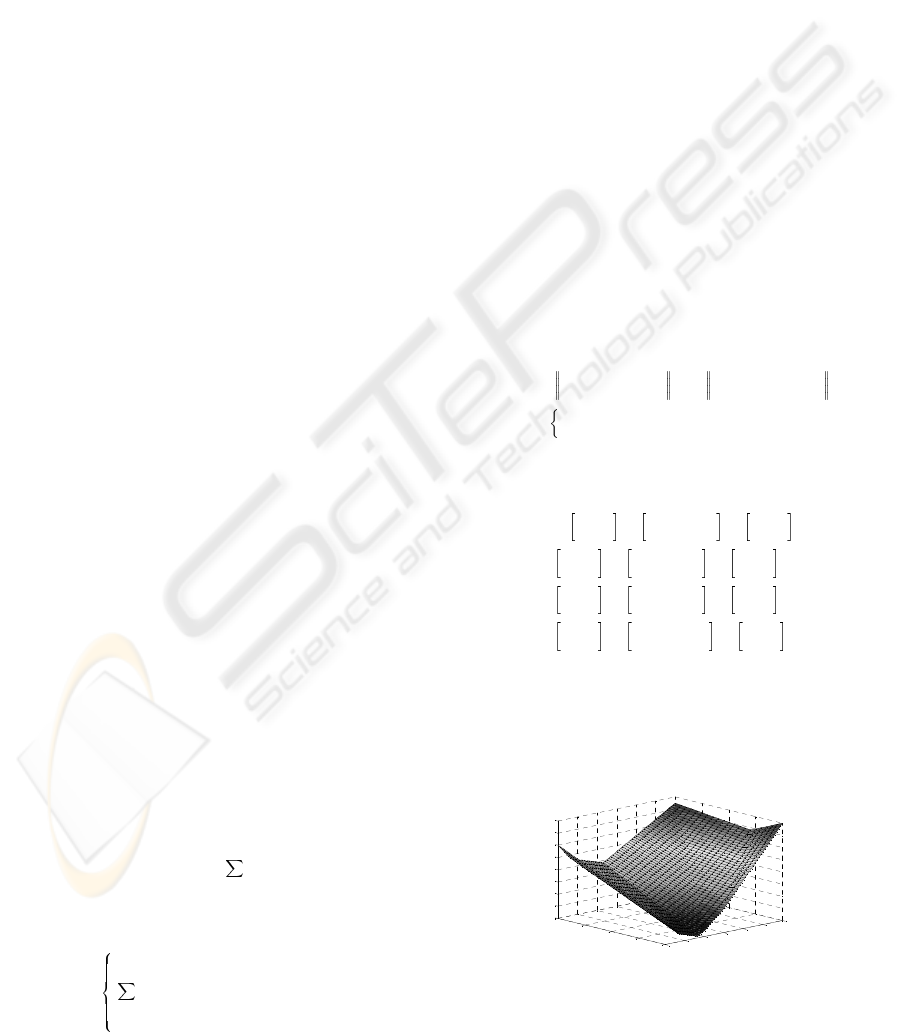
Example 1: To illustrate these transformations, con-
sider the parameter-free optimization (Fig. 1):
min
x
1
max
x
2
2x
1
+ x
2
− 3
x
1
− x
2
+ 1
∞
+
x
1
− 2x
2
+ 1
2x
1
+ 3x
2
− 7
∞
subject to
x
2
∈ [ - 1,1]
x
1
∈ [0, 6]
equivalent with:
min
x
1
,σ
1
,σ
2
,σ
3
,σ
4
,ρ
ρ
s.t. -
σ
1
σ
1
6
2x
1
− 2
x
1
6
σ
1
σ
1
;
-
σ
2
σ
2
6
2x
1
− 4
x
1
+ 2
6
σ
2
σ
2
;
-
σ
3
σ
3
6
x
1
− 1
2x
1
− 4
6
σ
3
σ
3
;
-
σ
4
σ
4
6
x
1
+ 3
2x
1
− 10
6
σ
4
σ
4
;
σ
1
+ σ
3
6 ρ; σ
2
+ σ
4
6 ρ; x
1
∈ [0, 6]
which can be tackled by any LP solver with solution:
[x
1
σ
1
σ
2
σ
3
σ
4
ρ]
∗
= [2.33 4.33 5.33 1.33 2.66 9.66]
-1
-0.5
0
0.5
1
0
1
2
3
4
5
6
2
4
6
8
10
12
14
16
18
Figure 1: Cost function for example 1.
A PARAMETERIZED POLYHEDRA APPROACH FOR THE EXPLICIT ROBUST MODEL PREDICTIVE CONTROL
5
4 THE EXPLICIT SOLUTION
In the following, the closed form of the RMPC law
is the main objective. It can be expressed as a func-
tion of parameters if a procedure of describing the
explicit solution of multi-parametric linear programs
(MPLP) is available. The literature on MPLP con-
tains the works of Gal and Nedoma (Gal and Nedoma,
1972) and further developments to linear, quadratic,
non-linear or mixed-integer solvers (Borelli, 2003).
Another procedure will be proposed here focusing on
the set of constraints and its geometrical represen-
tation. The feasible domain will be expressed as a
parametrized polyhedron. Due to the reformulation
of the optimization problem, the use of mixed vari-
ables is avoided. Thus the resulting algorithm dif-
fers from the solutions based on branch and bound
methods or other mixed integer linear solvers, being
mainly focused on the enumeration of the edges of an
augmented dimension polyhedron.
4.1 Parameterized polyhedra
A system of linear constraints define a polyhedron:
P = {x ∈ R
n
|A
eq
x = b
eq
; A
in
x 6 b
in
} (12)
by dual Minkowski representation of generators
(Schrijver, 1986):
P = conv.hull {x
1
, . . . , x
v
} +
+cone {y
1
, . . . , y
r
} + lin.spaceZ
(13)
where conv.hullX denotes the set of convex combi-
nations of points in X, coneY denotes nonnegative
combinations of unidirectional rays and lin.spaceZ
represents a linear combination of bidirectional rays.
It can be rewritten as:
P =
(
x| x =
v
X
i=1
λ
i
x
i
+
r
X
i=1
γ
i
y
i
+
l
X
i=1
µ
i
z
i
)
0 6 λ
i
6 1,
v
X
i=1
λ
i
= 1 , γ
i
> 0 , ∀µ
i
(14)
Remark: The generators saturate all the equalities, the
lines saturate all the constraints and only the rays and
the vertices can verify but not saturate a part of the
inequalities.
The geometrical computations might be burdened
by the differences that have to be taken into consid-
eration between rays and lines. These problems are
overcome with an homogenous representation (Wilde,
1993):
D =
ξ x
ξ
∈ R
n+1
ˆ
A
eq
ξ x
ξ
= 0
ˆ
A
in
ξ x
ξ
> 0
(15)
ˆ
A
eq
= [
A
eq
−b
eq
]
ˆ
A
in
=
A
in
−b
in
0 · · · 0 1
(16)
The original polyhedron P is found intersecting D
with the hyper-plane of equation ξ = 1. Following
the same change of dimension, the rays, vertices and
lines have a similar unified homogenous description:
ˆ
Y =
Y
X
0 · · · 0 1 · · · 1
;
ˆ
Z =
Z
0 · · · 0
(17)
and the generators representation will be:
D =
ξ x
ξ
ξ x
ξ
=
ˆ
Y λ
′
+
ˆ
Z µ; λ
′
> 0
(18)
A parameterized polyhedron is defined in the implicit
form by a finite number of inequalities and equali-
ties but the affine part depends linearly on a parameter
vector p for both equalities and inequalities:
P
′
(p) =
x ∈ ℜ
n
A
eq
x = B
eq
p + b
eq
; A
in
x 6 B
in
p + b
in
= x(p)| x(p) =
v
i=1
λ
i
(p)x
i
(p) +
r
i=1
γ
i
y
i
+
l
i=1
µ
i
z
i
0 6 λ
i
(p) 6 1,
v
i=1
λ
i
(p) = 1 , γ
i
> 0 , ∀µ
i
(19)
where z
i
are the lines, y
i
are the rays, x
i
are the ver-
tices and µ
i
, γ
i
, λ
i
the corresponding coefficients.
Remark: Only the vertices are concerned by the pa-
rameterization of the polyhedron (parameterized ver-
tices x
i
(p)), the rays and the lines do not change with
the parameters’ variation.
The parameterized polyhedron P
′
(p) can be writ-
ten as a non-parameterized polyhedron in an aug-
mented space as:
˜
P
′
=
(
x
p
∈ R
n+m
A
eq
− B
eq
x
p
= b
eq
[ A
in
| − B
in
]
x
p
= b
in
)
(20)
with a homogenous representation given by:
˜
D =
ξ x
ξ p
ξ
˜
A
eq
ξ x
ξ p
ξ
= 0
˜
A
in
ξ x
ξ p
ξ
> 0
=
=
ξ x
ξ p
ξ
ξ x
ξ p
ξ
=
˜
Z
˜
λ +
˜
Y˜µ; ˜µ > 0
(21)
where
˜
Y,
˜
Z are as in (17), the matrices:
˜
A
eq
= [ A
eq
| −B
eq
| − b
eq
] ;
˜
A
in
=
A
in
−B
in
−b
in
0 · · · 0 0 · · · 0 1
and
˜
λ, ˜µ are free-valued column vectors.
The form (19) faces an important difficulty as it
contains unknown parts, i.e. the parameterized ver-
tices x
i
(p).
ICINCO 2005 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
6

The parameterized vertices corre-
spond to m-polyhedra in the augmented
(data(R
n
)+parameter(R
m
)) space as in (20);
consequently the original vertices are:
x
i
(p) = Proj
n
F
m
i
(
˜
P
′
) ∩ S(p)
(22)
where Proj
x
(.) projects the combined space R
n+m
onto the original space R
n
and S(p) is the affine sub-
space:
S(ˆp) =
x
p
∈ R
n+m
p = ˆp
(23)
and F
m
i
(
˜
P
′
) is a m-face of
˜
P
′
found as the inter-
section between
˜
P
′
and the supporting hyperplanes
(Loechner and Wilde, 1997).
For each face of the polyhedron
˜
P
′
, a set of ac-
tive constraints is well defined, resulting in the fact
that each point
x
i
(p)
T
p
T
T
∈ F
m
i
(
˜
P
′
) lies in a
subspace of dimension m and thus x and p are related
by:
A
eq
¯
A
in
i
x =
A
′
eq
¯
A
′
in
i
p +
b
eq
¯
b
in
i
(24)
where
¯
A
in
i
,
¯
A
′
in
i
,
¯
b
in
i
are the subset of the inequal-
ities defined previously, satisfied by saturation. If the
matrix
A
T
eq
¯
A
T
in
i
T
is not invertible, it corre-
sponds to faces F
m
i
(
˜
P
′
)where for one given p more
than one point x ∈ R
n
is feasible and such combi-
nations do not match a vertex of P
′
(p). In fact this
case corresponds to the zones where P
′
(p) changes
its shape.
In the invertible case, the dependencies could be
rewritten:
x
i
(p) =
A
eq
¯
A
in
i
−1
A
′
eq
¯
A
′
in
i
p+
+
A
eq
¯
A
in
i
−1
b
eq
¯
b
in
i
(25)
For the implementation of these theoretical results,
an enumeration of the m-faces must be available to-
gether with the k(> m) generators of each face
F
m
i
(
˜
D) in a homogenous representation. If the pro-
jections:
P r
n
ξ x
i
(p)
ξ p
ξ
!
=
ξ x
i
(p)
ξ
; (26)
P r
m
ξ x
i
(p)
ξ p
ξ
!
=
ξ p
ξ
(27)
are defined, then (22) could be rewritten as:
ξ x
i
(p)
ξ
= Pr
n
(F
i
) Pr
m
(F
i
)
−1
p
ξ
;
F
i
=
"
ξ x
ij
(p)
ξ p
ξ
!#
, j = 1..k
(28)
The case when the right inverse P r
m
(F
i
)
−1
does not
exist results in the already mentioned conditions of an
m-face that does not define a unique vertex of P
′
(p).
Remark: Numerical methods (Leverge, 1994) exist
for implementing the double description of polyhedra.
The polyhedral duality allows both transformations,
from constraints to generators and conversely ((Lev-
erge, 1994), (Loechner and Wilde, 1997), (Motzkin
et al., 1953), (Schrijver, 1986), (Wilde, 1993) ).
4.2 Explicit solution of LP
Recalling the problem to be solved similar to (11):
x
∗
(p) = min
x
f
T
x
subject to A
in
x 6 B
in
p + b
in
(29)
with the optimal solution as a piecewise affine func-
tion of the parameter.
Consider now a fixed parameter p
ct
. When ana-
lyzing the optimization problem (29) corresponding
to this value, a geometrical point of view can be used,
as in Chernikova algorithm (Leverge, 1994).
Proposition 2. For a linear problem three cases may
arise:
a) If the associated polyhedron P =
{x|A
in
x 6 B
in
p
ct
+ b
in
} is empty, the problem is
infeasible;
b) If there exists a bidirectional ray z such that
f
T
z 6= 0 or there exists a unidirectional ray y such
that f
T
y 6 0, then the minimum is unbounded;
c) If all bidirectional rays z are such that
f
T
z = 0 and all unidirectional rays y are such
that f
T
y > 0, then the minimum is defined by:
min
f
T
x
i
|x
i
vertex of P
and the solution is:
S = conv.hull {x
′
1
, . . . , x
′
s
} +
+cone {y
′
1
, . . . , y
′
r
} + lin.spaceP
where x
′
i
are the vertices attaining the minimum and
y
′
i
are such that f
T
y
′
i
= 0.
Now extending this perspective to the multi-
parametric case for each p ∈ R
n
, a similar result
can be established.
Proposition 3. The solution of a multi-parametric
linear optimization problem is characterized by the
followings:
a) If there exists a bidirectional ray z such that
f
T
z 6= 0 or there exists a unidirectional ray y such
that f
T
y 6 0, then the minimum is unbounded;
b) For the sub domains of the parameter space
D
ifez
∈ R
n
with the associated polyhedron P =
{x|A
in
x 6 B
in
p + b
in
} empty while p ∈ D
ifez
,
the problem is infeasible (this can be restated in
terms of parameterized vertices: ”for the sub domains
where no parameterized vertex is available, the prob-
lem is infeasible”);
A PARAMETERIZED POLYHEDRA APPROACH FOR THE EXPLICIT ROBUST MODEL PREDICTIVE CONTROL
7

c) If all bidirectional rays z are such that f
T
z = 0
and all unidirectional rays y are such that f
T
y > 0,
then the sub domains D
k
can be defined such that the
minimum:
min
f
T
x
i
(p)|x
i
(p) vertex of P (p)
is attained by the same subset of vertices of . The
complete solution for this sub domain is:
S
k
(p) = conv.hull {x
′
1k
(p), . . . , x
′
sk
(p)} +
+cone {y
′
1
, . . . , y
′
r
} + lin.spaceP (p)
where x
′
i
are the vertices corresponding to the mini-
mum and y
′
i
are such that f
T
y
′
i
= 0.
One has to observe that our goal is to find the ex-
plicit solution for the LP derived from the optimiza-
tion problem in robust MPC which has some particu-
larities:
• The linearity space is empty since the cost function
is positive convex.
• There is no unidirectional ray such that because this
will imply that the cost function is not convex.
• A single value in S
k
(p) is to be used on-line in
MPC.
Proposition 4. The solution of a multi-parametric
linear optimization problem within robust MPC satis-
fies:
a) The problem is infeasible for the sub domains
D
ifez
∈ R
n
where no parameterized vertex is avail-
able;
b) Sub domains D
k
are defined as the
zones for which the solution S
k
(p) =
conv.hull {x
′
1k
, . . . , x
′
sk
} is given by the same
set of parameterized vertices satisfying:
f
T
x
′
1k
= . . . = f
T
x
′
sk
=
= min
f
T
x
i
(p)|x
i
(p) vertex of P (p)
Remark: As the parameters in (29) vary inside the
parameter space, the vertices of the optimization do-
main may split, shift or merge. The global optimum
will follow this evolution within the parameter space
as the optimum is a continuous function of parameter.
From a practical point of view the implementation
of this result is direct and follows the steps:
1. Find the expression of the parameterized feasible
domain in the augmented data+parameter space:
A
in
x 6 B
in
p+b
in
⇔ [
A
in
|−B
in
]
x
p
6 b
in
2. Find the m-vertices where n is the dimension of the
parameter space.
3. Retain only those corresponding to parameterized
vertices by ignoring those with non-invertible pro-
jection on the parameter space
4. Compute validity domain D
k
for each parameter-
ized vertex
5. Compare each pair of vertices. In the case of a non-
empty intersection of their validity domains, split
them using the linear cost function. The final ex-
pression will be a union of regions corresponding
to the parameterized vertices containing the opti-
mum.
A special attention must be given to the step 5 with
the iterative comparison of the vertices and their va-
lidity domains. A possible routine may be based on
the following procedure.
procedure CutDomains (VD: the set of
all validity domains)
n=cardinal (VD)
i=1; j=2
while i<n+1
while j<n+1
if V D
j
∩ V D
i
6= ∅
if f
T
x
i
6 f
T
x
j
then V D
j
= V D
j
− V D
i
if f
T
x
j
6 f
T
x
i
then V D
i
= V D
i
− V D
j
j=j+1
endif
end
i=i+1
end
Remark: The procedure is initialized with the set
of validity domains obtained after the edges’ enumer-
ation (step 2).
Remark: The difference of two convex domains is
not a close operation and thus the output of the proce-
dure is a union of convex sub domains of the parame-
ters space which do not necessarily cover the entire
R
m
(step 4).
From the RMPC point of view, the difference:
ℵ = R
m
\ {∪D
k
; k = 1..n
D
} (30)
describes the regions of infeasible parameters.
Once the set of parameter space sub domains D
k
created, it can be used in an on-line optimization find-
ing the control sequence for robust MPC.
Algorithm 2 (on-line solver)
1. Find the appurtenance set D
k
; k = 1..n
D
for the
current parameter p. Return infeasible if no D
k
is
found.
2. Compute k
u
MP C
= x
k
(p) using the piecewise for-
mulation of the parameterized vertices as in (25)
and effectively apply the first component.
3. Restart from 1 with the new p.
5 EXAMPLE
Consider the model (Scokaert and Mayne, 1998):
x
t+1
= x
t
+ u
t
+ v
t
ICINCO 2005 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
8

In order to illustrate the ideas of RMPC presented ear-
lier, a two step prediction is considered and thus the
following optimization problem is to be solved at each
sampling time:
V (x
t
) = min
u
t
,u
t+1
1
X
k=0
x
t+k|t
+ 10 |u
t+k
|
s.t.
- 1.2 6 x
t+k|t
6 2, k = 0, 1, 2
- 1 6 x
t+2|t
6 1,
- 1 6 v
t+k
6 1, k = 0, 1
(31)
Ignoring the disturbances, the explicit solution of the
problem can be found using the geometrical approach
presented in the previous section by inspecting the 22
parameterized vertices. After the stage of discrimina-
tion of the validity domains, the explicit RMPC law is
found as:
Affine control law Validity domain
u
t
= −x
t
− 1 −1.2 6 x
t
6 −1
0 −1 6 x
t
6 0
0 0 6 x
t
6 1
u
t
= −x
t
+ 1 1 6 x
t
6 2
It can be observed that there are two domains with
the same control law due to the fact that the cost
function changes its slope and thus the maximum lies
on different parameterized vertices in the augmented
space. In this case, as their union is a convex set, they
can be collated in a single set. In the general case, this
operation can be done using tools of convex recog-
nition of union of polyhedra (see (Bemporad et al.,
2002a) for details).
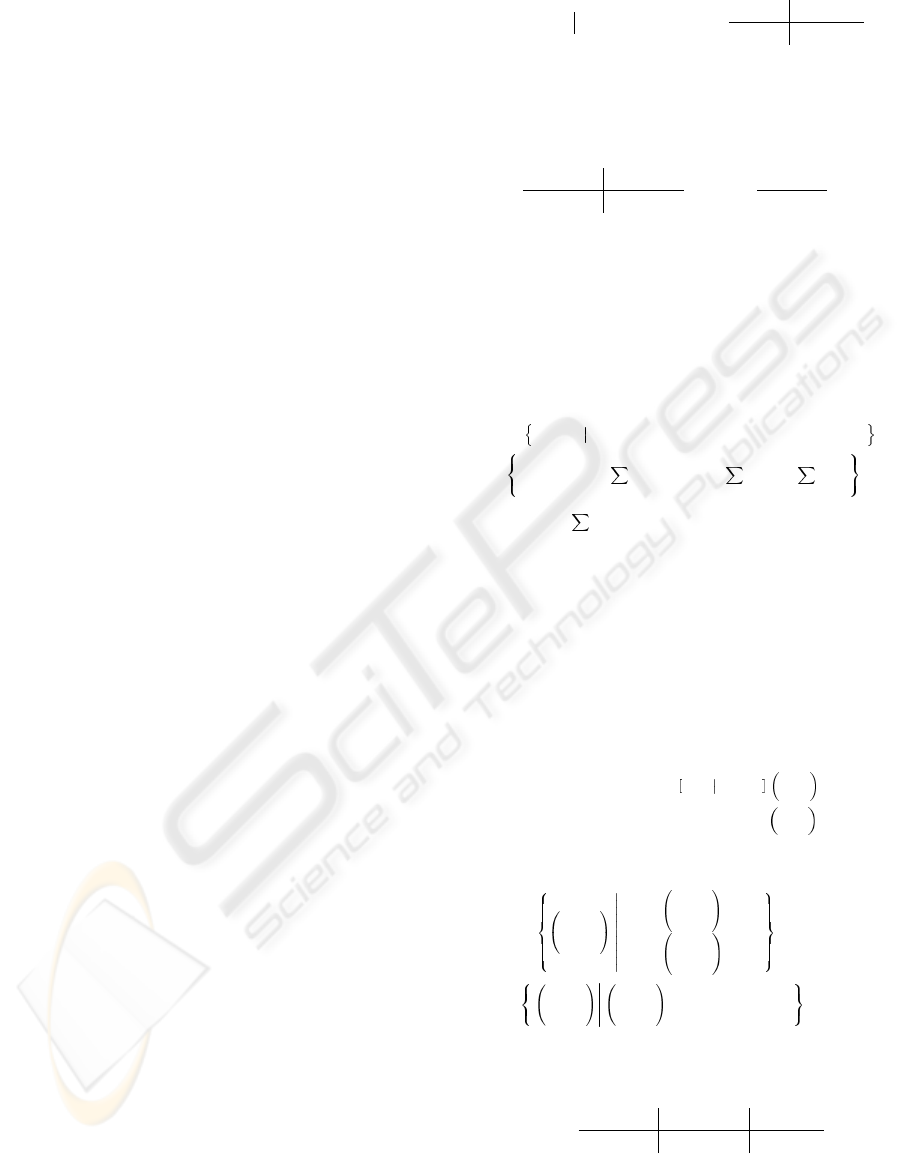
Simulating this control law for an initial condition
x
0
= −1.2 proves to keep the system trajectory in-
side the constraints in the disturbance free case (Fig-
ure 2a). If the same controller is used with v
k
=
−1/k, k > 1 , the trajectory will violate the con-
straints (Figure 2b).
Further if the robust MPC explicit formulation is to
be achieved then the min-max version of (31) is to be
solved:
V (x
t
) = min
u
t
,u
t+1
max
v
t
,v
t+1
1
X
k=0
x
t+k|t
+ 10 |u
t+k
|
s.t.
- 1.2 6 x
t+k|t
6 2, k = 0, 1, 2
- 1 6 x
t+2|t
6 1,
- 1 6 v
t+k
6 1, k = 0, 1
(32)
In this form, there is no solution as the optimization
is infeasible. In fact there is no control law at first
sampling time:
u
t|t
= a
1
x
t
+ b
1
u
t+1|t
= a
2
x
t
+ b
2
u
t|t
+ c
2
which can keep robustly the system trajectory within
the constraints. This fact is obvious as long as an
0 5 10 15 20 25
-2
-1
0
1
2
b) Nominal MPC with disturbance
0 10 20 30
0
0.2
0.4
0.6
0.8
1
b) Command - u - MPC w.d.
0 5 10 15 20 25
-2
-1
0
1
2
a) Nominal MPC - disturbance free
0 10 20 30
0
0.05
0.1
0.15
0.2
a) Command - u - MPC d.f.
Figure 2: a) Left: Nominal MPC - disturbance-free case;
b) Right: Nominal MPC for the system affected by distur-
bances.
”open-loop” type of RMPC is considered, where the
cumulative damage of the disturbances can not be
mitigated. When writing explicitly the end-point con-
straints in (32) for the extremal combinations of dis-
turbances, this becomes evident as:
ν
t
ν
t+1
=
1
1
⇒
−1 6 x
t
+ u
t|t
+ u
t+1|t
+ 2 6 1 ⇒
−3 6 x
t
+ u
t|t
+ u
t+1|t
6 −1;
ν
t
ν
t+1
=
−1
−1
⇒
−1 6 x
t
+ u
t|t
+ u
t+1|t
− 2 6 1 ⇒
1 6 x
t
+ u
t|t
+ u
t+1|t
6 3
which means that there is no control combination to
maintain the law feasible without a prior knowledge
of disturbances. However the so called ”closed loop”
formulation provides the necessary degrees of free-
dom in this sense. One has to solve:
V (x
t
) = min
u
t
max
v
t
min
u
t+1
max
v
t+1
1
X
k=0
x
t+k|t
+ 10 |u
t+k
|
s.t.
- 1.2 6 x
t+k|t
6 2, k = 0, 1, 2
- 1 6 x
t+2|t
6 1,
- 1 6 v
t+k
6 1, k = 0, 1
(33)
Following the theoretical result in section 4, the ex-
plicit solution can be achieved by solving the inner
minimization:
V (x
t
, u
t
, v
t
) = min
u
t+1
max
v
t+1
|x
t
| +
+ |x
t
+ u
t
+ ν
t
| + 10 |u
t
| + 10 |u
t+1
|
s.t.
- 1.2 6 x
t+k|t
6 2, k = 0, 1, 2
- 1 6 x
t+2|t
6 1,
- 1 6 v
t+k
6 1, k = 0, 1
(34)
A PARAMETERIZED POLYHEDRA APPROACH FOR THE EXPLICIT ROBUST MODEL PREDICTIVE CONTROL
9
The solution using the geometrical approach is imme-
diate as there are exactly 2 parameterized vertices on
which the minimum lies and associated control law is:
u
t+1|t
= −(x
t
+u
t|t
+ν
t
) = −x
t+1
for - 1.2 6 x
t
6 2
Notice that the control law uses the additional infor-
mation available in comparison with (32). With this
result, for the outer optimization problem:
min
u
t
max
v
t
|x
t
| +
11x
t+1|t
+ |10u
t
|
s.t.
- 1.2 6 x
t+k|t
6 2, k = 0, 1
- 1 6 v
t
6 1
(35)
the explicit solution is once more immediate as there
are only two non-degenerate parameterized vertices
describing the geometric locus of the minimum. Ap-
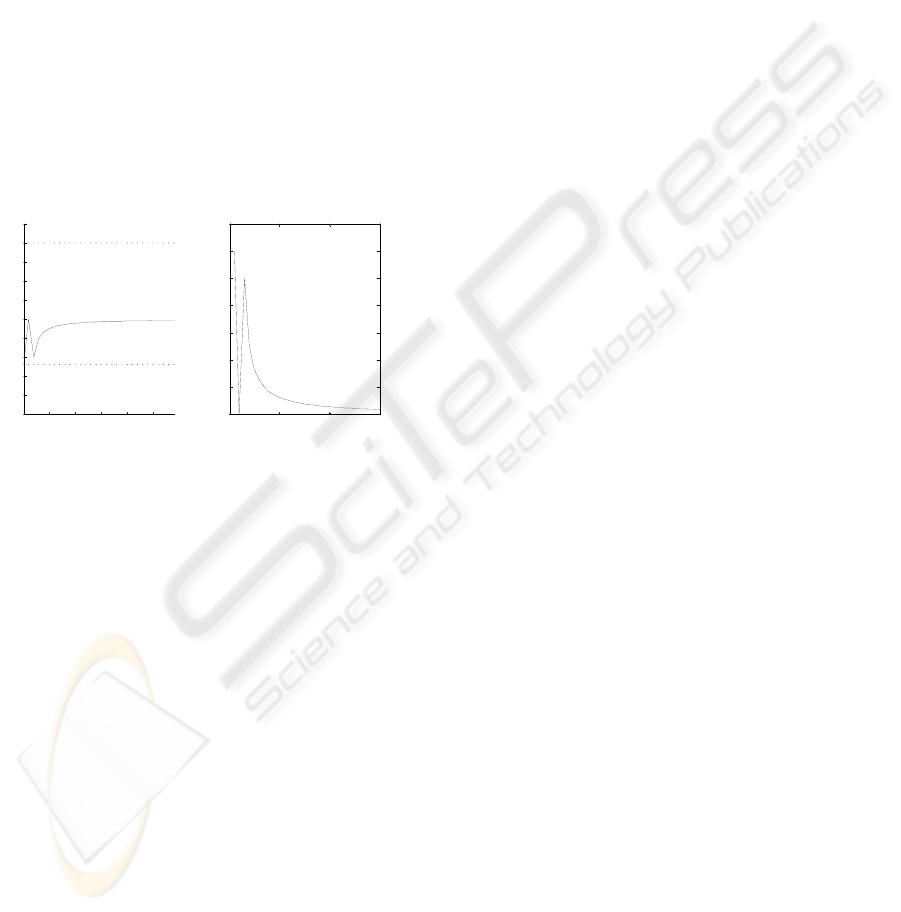
plying this RMPC law:
u
t
= −x
t
for - 1.2 6 x
t
6 2
the system affected by disturbances is regulated to the
origin (Figure 3). The solutions of the optimization
0 5 10 15 20 25
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
Robust MPC
0 10 20 30
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Command - u
Figure 3: System trajectory with robust MPC law.
problems in (31), (34), (35) were obtained using pa-
rameterized polyhedra routines in 2, 0.39 and 0.91
seconds respectively. However for complex system
the computational time may explode as the number
of parameterized vertices has an exponential depen-
dence on the number of constraints added during the
transformation stages.
6 CONCLUSION
The paper used a unified approach for the con-
straints handling in the context of RMPC confirming
the formulation of the optimal sequence as a multi-
parametric quadratic problem. The explicit solution
of this problem was synthesized by means of para-
meterized polyhedra. This geometrical approach pro-
poses an alternative to the recent methods presented
in the literature. Its advantages might be the fact that
optimum lies on the parameterized vertices providing
a natural constant linear affine dependence in the con-
text parameters. An aspect which may receive further
attention is the enumeration of faces for the parame-
terized polyhedra which may turn to be a computa-
tionally demanding task.
REFERENCES
Bemporad, A., Borelli, F., and Morari, M. (2001). Robust
model predictive control: Piecewise linear explicit so-
lution. In Proc. European Control Conference.
Bemporad, A., Fukuda, K., and Torrisi, F. (2002a). Convex-
ity recognition of the union of polyhedra. In Compu-
tational Geometry, Vol. 18.
Bemporad, A., Morari, M., Dua, V., and Pistikopoulos, E.
(2002b). The explicit linear quadratic regulator for
constrained systems. In Automatica, vol. 38.
Borelli, F. (2003). Constrained Optimal Control of Linear
and Hybrid Systems. Springer-Verlag, Berlin.
Gal, T. and Nedoma, J. (1972). Multiparametric linear pro-
gramming. In Management Science, 18.
Goodwin, G., Seron, M., and Dona, J. D. (2004). Con-
strained Control and Estimation. Springer-Verlag,
Berlin.
Kerrigan, E. (2000). Robust Constraint Satisfaction: Invari-
ant Sets and Predictive Control. PhD Thesis, Univer-
sity of Cambridge.
Kerrigan, E. (2004). Feedback min-max model predictive
control using a single linear program: Robust stability
and the explicit solution. In International Journal of
Robust and Nonlinear Control, vol.14.
Kothare, M., Balakrishnan, V., and Morari, M. (1996). Ro-
bust constrained model predictive control using linear
matrix inequalities. In Automatica, vol. 32.
Leverge, H. (1994). A note on chernikova’s algorithm. In
Technical Report 635. IRISA, France.
Loechner, V. and Wilde, D. (1997). Parameterized poly-
hedra and their vertices. In Int. Journal of Parallel
Programming, vol. 25.
Maciejowski, J. (2002). Predictive Control with Con-
straints. Prentice Hall, UK.
Motzkin, T., Raiffa, H., Thompson, G., and Thrall, R.
(1953). The double description method. In Theodore
S. Motzkin: Selected Papers. Birkhauser, Boston.
Olaru, S. and Dumur, D. (2004). A parameterized polyhedra
approach for explicit constrained predictivecontrol. In
43rd IEEE Conference on Decision and Control.
Rossiter, J. (2003). Model-based Predictive Control. A
practical approach. CRC Press.
Schrijver, A. (1986). Theory of Linear and Integer Pro-
gramming. John Wiley and Sons, NY.
Scokaert, P. and Mayne, D. (1998). Min-max feedback
model predictive control for constrained linear sys-
tems. In IEEE Trans. Automatic Control, 43.
Seron, M., Goodwin, G., and Dona, J. D. (2002). Charac-
terisation of receding horizon control for constrained
linear systems. In Asian Journal of Control, vol. 5.
Wilde, D. (1993). A library for doing polyhedral operations.
In Technical report 785. IRISA, France.
ICINCO 2005 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
10
