
COMPARATIVE PERFORMANCE OF INTELLIGENT
IDENTIFICATION AND CONTROL ALGORITHMS FOR A
FLEXIBLE BEAM VIBRATION
M. A. Hossain, A. A. Madkour and K. P. Dahal
Modelling Optimization Scheduling And Intelligent Control (MOSAIC) Research Centre
Department of Computing, University of Bradford, Bradford, BD7 1DP, UK
Keywords: Performance issues, system identification, active vibration control, genetic algorithm, recursive least square
and ANFIS.
Abstract: This research presents an investigation into the comparative performance in implementing intelligent system
identification and control algorithms. Several approaches for on-line system identification and control are
explored and evaluated to demonstrate the merits in implementing the algorithms for similar level of error
convergence. Active vibration control (AVC) of a flexible beam system is considered as a platform for the
investigation. The AVC system is designed using three different on-line identification approaches, which
include (a) genetic algorithms (GAs) (b) adaptive neuro-fuzzy inference system (ANFIS) and (c) recursive
least square (RLS) estimation. These algorithms are used to estimate a linear discrete model of the system.
Based on these algorithms, different approaches of the AVC system are implemented, tested and validated
to evaluate the relative merits of the algorithms. Finally, a comparative performance of the error
convergence performance in implementing the identification and control algorithms is presented and
discussed through a set of experiments.
1 INTRODUCTION
Many demanding complex identification and control
algorithms cannot be satisfactorily realised in real-
time due to such computational complexity.
Comparative performance analysis of alternative
strategies, where multiple solutions are available,
could provide an opportunity to identify the best
algorithm(s). Many attempts have been made in the
past at devising methods of tackling the control
problem using artificial intelligence (Amato et al.,
2001; Hossain and Tokhi, 1997; Yamlidou et al.,
1996). Many attempts have also been made for real-
time control system implementation (Baxter et al.,
1994; Jones, 1989; Tokhi et al., 2002). However,
limited contributions have been reported on real-
time performance issues in implementing intelligent
identification and control algorithms (Albertos, et
al.,2001;Madkour et al, 2004).
The conventional on-line system identification
schemes, such as least squares, instrumental
variables and maximum likelihood are in essence
local search techniques. These techniques often fail
in the search for the global optimum if the search
space is not differentiable or linear in the
parameters. On the other hand, these techniques do
not iterate more than once on each datum received.
To address these issues, several approaches using
artificial intelligence (AI) techniques have been
reported earlier (Hossain and Tokhi, 1997). This
investigation considers some of these approaches to
explore comparative performance in implementing
the algorithms for same error convergence.
2 ALGORITHMS
The intelligent active vibration control algorithm
consists of flexible beam simulation algorithm,
control algorithm and system identification using
GAs, ANFIS and RLS algorithms. Therefore, three
approaches of AVC algorithm are designed based on
the three identification algorithms. These algorithms
are briefly described below.
364
A. Hossain M., A. Madkour A. and P. Dahal K. (2005).
COMPARATIVE PERFORMANCE OF INTELLIGENT IDENTIFICATION AND CONTROL ALGORITHMS FOR A FLEXIBLE BEAM VIBRATION.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Signal Processing, Systems Modeling and
Control, pages 364-367
DOI: 10.5220/0001179903640367
Copyright
c
SciTePress

2.1 Simulation and control
algorithms
Consider a cantilever beam system with a force
()
txF , applied at a distance
x
from its fixed
(clamped) end at time
t
. This will result in a
deflection
()
txy , of the beam from its stationary
position at the point where the force has been
applied. In this manner, the governing dynamic
equation of the beam is given by
() ()
()
txF
mt
txy
x
txy
,
1
,,
2
2
4
4
2
=+
∂
∂
∂
∂
µ
(1)
where,
µ
is a beam constant and m is the mass of
the beam. Discretising the beam into a finite number
of sections (segments) of length
x∆ and considering
the deflection of each section at time steps
t
∆
using
the central FD method, a discrete approximation to
equation (1) can be obtained as (Kourmoulis, 1990)
(
)
()
txF
m
t
SYYY
kkk
,
2
2
11
∆
+−−=
−+
λ
(2)
where,
()()
42
22
xt ∆∆=
µλ
, S is a pentadiagonal
matrix, entries of which depend on the physical
properties and boundary conditions of the beam, and
i
Y ( 1,,1 −+= kkki ) is a vector representing the
deflection of end of sections
1
to n of the beam at
time step
i . Equation (2) is the required relation for
the simulation algorithm.
C
Observed
Signal
Detector
Secondary
source
Primary
source
Figure 1: Active vibration control structure
A schematic diagram of an AVC structure is shown
in Figure 1. A single-input single-output (SISO)
AVC system is considered for vibration suppression
of the beam. The unwanted (primary) disturbance is
detected by a detection sensor, processed by a
controller to generate a cancelling (secondary,
control) signal so as to achieve cancellation at an
observation point along the beam.
The objective in Figure 1 is to achieve total
(optimum) vibration suppression at the observation
point. This requires the primary and secondary
signals at the observation point to be equal in
amplitudes and to have a
D
180 phase difference.
ANFIS, GAs and RLS algorithms are used as
system identification algorithms to estimate the
AVC system cancelling signal. To identify the
cancelling signal, a linear discrete second order
model will be estimated using ANFIS, GA and RLS.
)(
)()(1
)()(1
)(
2
2
1
1
2
2
1
1
zU
zaza
zbzb
zY
−−
−−
++
++
=
(3)
where Y is the system input and U is its output
2.2 Identification algorithms
2.2.1 Adaptive neuro-fuzzy inference system
The hybrid Adaptive Neuro-Fuzzy inference
system(ANFIS) provides a method of fuzzy
modelling to learn information about a data set, in
order to compute the membership function
parameters that best allow the associated fuzzy
inference system to track the given input-output
data. ANFIS has been proven to be an excellent
function approximation tool (Jian, 1993). This
function is used for system identification, which is a
major training routine of Sugeno-type FIS (fuzzy
inference system).
2.2.2 Genetic algorithms
A Genetic Algorithm (GA) simultaneously evaluates
many points in the parameter space and converges
more likely towards the global solution. This
algorithm differs from other search techniques in
that it uses concepts taken from natural genetics and
evolution theory. The GA is used based on the
method of minimization of the prediction error. The
method of evolutionary computation works as
follows: create a population of individuals, evaluate
their fitness, generate a new population by applying
genetic operators, and repeat this process for a
number of times Genetic algorithms consider the
same multi parameter system given by equation (3)
with the following fitness function (Hossain and
Tokhi, 1997):
∑
=
−=
r
k
kykyrJ
1
)(
ˆ
)()( (4)
where,
)(ky is measured output, )(
ˆ
ky is estimated
model output, and
r
is the number of sets of
measurement considered.
COMPARATIVE PERFORMANCE OF INTELLIGENT IDENTIFICATION AND CONTROL ALGORITHMS FOR A
FLEXIBLE BEAM VIBRATION
365

2.2.3 RLS algorithm
This is a well-known traditional adaptive filter
algorithm estimates the current parameter vector
)(
ˆ
k
θ
based on the previous estimated vector
)1(
ˆ
−k
θ
.
Estimation of the parameter vector
θ
is performed
such that the estimate
r
θ
ˆ
minimizes the cost
index
)(rJ , where
r
denotes the number of sets of
measurement (Madkour et al., 2004)
3 IMPLEMENTATION AND
RESULTS
A cantilever beam in transverse vibration of length
m 635.0=L , mass kg 037.0=m , was considered.
The beam was discretised into 19 equal-length
segments. To allow dominant modes of vibration of
the beam to be excited, a finite-duration step
disturbance force of amplitude
N 1.0 was applied to
the beam. The input and output samples of the plant
were collected from two separate points on the
beam. The sample period was selected as
ms 3.0=∆t , which is sufficient to cover all the
dominant resonance modes of vibration of the beam
(Hossain, 1995).
To identify the cancelling signal, a linear discrete
second order model was estimated using ANFIS,
GA and RLS.
Figure 2 shows the error convergence and the
real-time performances of the algorithms. It is worth
mentioning that the error has been calculated based
on the differences between absolute value of the
original and the estimated signal. On the other hand,
the execution time of the algorithms was measured
for 6000 iterations with
ms 3.0 sampling time.
Therefore, the maximum execution time of the
algorithms in implementing real-time should be
s 8.1 . It is worth noting that for the sake of better
investigation on execution time, error convergences
for all the algorithms were considered to be within a
similar level. However, an insignificant error
convergence variation is observed during
implementation. With regard to the execution time
in implementing the system identification
algorithms, all the algorithms achieved real-time
performance. It is noted that the RLS algorithm
offers the best performance and ANFIS offers the
worst performance among the three algorithms. It is
also noted that the execution time in implementing
ANFIS is double as compared to the RLS algorithm
and 1.56 times as compared to the GA.
It is also observed that performance of the GA
based system identification varies due to the bit
representation and population size. Therefore, a
further investigation was made to explore and
demonstrate this issue. Figure 3 shows execution
times in implementing the GA based system
identification algorithms for 8 and 16 bits
representation. It is observed that except population
with 10 of 8 bit representation, none of the other
situations achieved real-time performance.
0.2412
1.56
0.2383
2.03
0.2465
1
0
0.5
1
1.5
2
2.5
Execution time (s)
GAs ANFIS RLS
Algorithms for system identification
Error Conver.
Relative Time
Figure 2: Relative performance in implementing the
system identification algorithms
3.121
18 .8 9
25.051
0
5
10
15
20
25
30
10 5 0 10 0
Populat ion Size
8 bits rep.
16 bits rep.
Figure 3: Performance of GA for 8 and 16 bits
representation
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
-8
-6
-4
-2
0
2
4
6
8
x 10
-4
Tim e (sec )
Deflection (m)
Figure 4: Performance in implementing the AVC
algorithm using ANFIS
Figures 4, 5 and 6 show the time-domain
performance in implementing the AVC system
using, ANFIS, GA and RLS algorithms, where the
dotted and solid lines represent fluctuation of the
beam at the end point before and after cancellation.
It is noted that ANFIS offers the best and RLS the
worst performance among the three methods. It is
also noted that the peak to peak end-point
ICINCO 2005 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
366
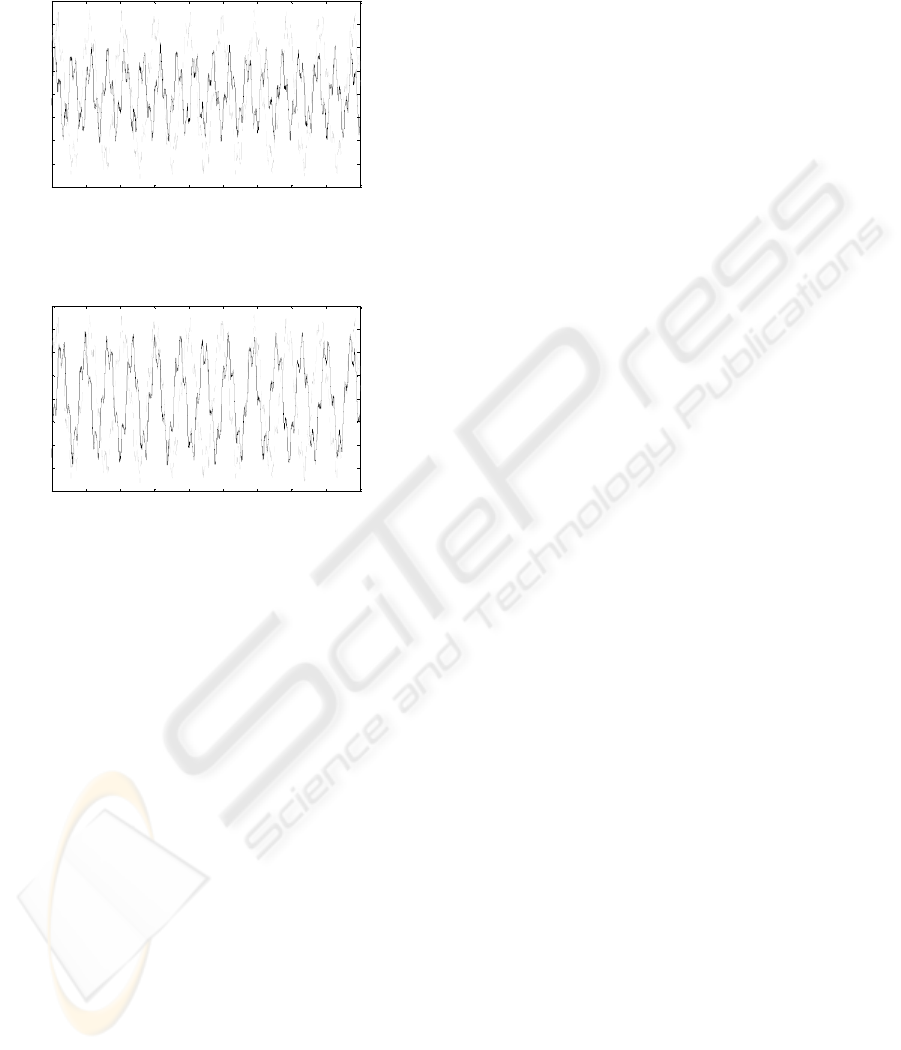
fluctuation after cancellation using ANFIS is 4, GA
is 1.8 and RLS is 1.2 times smaller as compared to
the fluctuation before cancellation.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
-8
-6
-4
-2
0
2
4
6
8
x 10
-4
Tim e (s e c )
Defl ection (m)
Figure 5: Performance in implementing the AVC
algorithm using GA
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
-8
-6
-4
-2
0
2
4
6
8
x 10
-4
Tim e (s e c )
Defl ecti on (m)
Figure 6: Performance in implementing the AVC
algorithm using RLS
4 CONCLUDING REMARKS
This paper has presented the relative real-time
performance and error convergence issues in
implementing system identification and AVC system
of a flexible beam vibration using, ANFIS, GA and
RLS algorithm. A comparative performance of the
algorithms has been presented and discussed through
a set of experiments. For system identification, it is
noted that the execution time in implementing
ANFIS as compared to GA and RLS is significantly
higher. However, ANFIS shows slightly better error
convergence for the same number of iterations. On
the other hand, real-time computing performance of
GA varies based on the selection of the size of
population and binary representation. It is noted that
the GA with higher bit representation and larger
population size for the same error convergence
performs slower than ANFIS. It is also noted that the
execution time for each of the three algorithms is
less than the sampling time, in turn satisfying the
real-time requirement. However, in case of GA, this
is true only for population size 10 with 8 bit
representation.
REFERENCES
Albertos, P., Crespo, A. and Simo, J. (2001). Real-time
constraints in intelligent control,
http://www.delet.ufrgs.br/vsbai/vsbai/artigos/1156.pdf
Amato P., Farina, M., Palma, G. and Porto, D. (2001). An
alife-Inspired evolutionary algorithm for adaptive
control of time-varying system, Proc EUROGEN
2001, Athens, Greece, pp. 15-16
Baxter, M. J., Tokhi, M. O. and Fleming, P. J. (1994).
Parallelising algorithms to exploit heterogeneous
architectures for real-time control systems,
Proceedings of IEE Control-94 Conference, Coventry,
21-24 March 1994, 2, pp. 1266-1271.
Hossain, M. A. (1995). Digital signal processing and
parallel processing for real-time adaptive noise and
vibration control, Ph.D. thesis, Department of
Automatic Control and System Engineering, The
University of Sheffield, UK.
Hossain, M. A. and Tokhi, M. O. (1997). Evolutionary
adaptive active vibration control, Proc Inst.
Mechanical Eng., 211(1), pp. 183-193.
Jang, J. S. R. (1993). ANFIS: Adaptive-Network-based
Fuzzy Inference Systems, IEEE Transactions on
Systems, Man, and Cybernetics, 23(3), pp. 665-685,
1993.
Jones, D. I. (1989). Parallel architectures for real-time
control, Electronics and Communications Engineering
Journal, 1(5), 217-224.
Kourmoulis, P. K. (1990). "Parallel processing in the
simulation and control of flexible beam structure
systems", PhD thesis, Dept. of Automatic Control &
Systems Engineering, The University of Sheffield.
Madkour, A. A. M., Hossain, M. A., Dahal, K. P. and Yu,
H., (2004). Real-time System Identification using
Intelligent Algorithms, Proceedings of IEEE SMC
UK-RI Chapter Conference 2004 on Intelligent
Cybernetic Systems, pp. 236-241.
Tokhi, M. O. and Hossain, M. A. (1994). Self-tuning
active vibration control in flexible beam structures,
Proc. IMECE-I: J. Systems Control Eng. 208(14), pp.
263-277.
Tokhi, M. O., Hossain, M. A. and Shaheed, M. H. (2002).
Parallel Computing for Real-time Signal Processing
and Control, Springer, London.
Yamlidou, K. Moody, J., Lemmon, M. and Antsaklis, P.
(1996). Feedback control of Petri nets based on place
invariants, Automatica, 32(1), pp. 15-28.
COMPARATIVE PERFORMANCE OF INTELLIGENT IDENTIFICATION AND CONTROL ALGORITHMS FOR A
FLEXIBLE BEAM VIBRATION
367
