
REVERSIBILITY ENFORCEMENT FOR UNBOUNDED PETRI NETS
Hanife Apaydın
¨
Ozkan and Aydın Aybar
Department of Electrical and Electronics Engineering, Anadolu University
26470 Eskis¸ehir, TURKEY
Keywords:
Petri nets, partially reversibility, reversibility, algorithms.
Abstract:
In this paper, partially reversibility property and reversibility enforcement are studied for unbounded Petri nets.
A method which tests partial reversibility, and also finds a bound vector guaranting reversibility for unbounded
Petri nets is developed and an algorithm of the method is generated. Furthermore a controller design approach
which enforces reversibility for unbounded Petri nets is introduced.
1 INTRODUCTION
Petri net model is a common tool for discrete event
systems. Some properties and definitions are used to
describe this model. Properties of Petri nets are de-
composed into two types such as behavioral and struc-
tural properties (Desrochers and Al-Jaar, 1995; Proth
and Xie, 1996). In this work, we consider reversibility
and partially reversibility which are two of important
behavioral properties of Petri nets.
Some approaches have been presented to analyse
reversibility and partially reversibility of Petri nets.
The most favor is constructing reachability set. But
it is not efficient for unbounded Petri nets because of
infinite number of reachable marking vectors (Peter-
son, 1981). If a Petri net is partially reversible for at
least one initial state, that is proven by using a struc-
tural analysis method named T-invariant (Desrochers
and Al-Jaar, 1995). The method which was developed
in (Jeng et al., 2002) verifies reversibility for 1-place
unbounded Petri nets. Since these approaches give
sufficient but not necessary conditions for partially re-
versibility, they do not propose a way to test partially
reversibility of all unbounded Petri nets.
In this work, reversibility enforcement is consid-
ered for unbounded Petri nets. It is possible to en-
force reversibility for a Petri net, if the net is par-
tially reversible. Hence, testing partially reversibility
is very important for our work. We present a method
to test partially reversibility for unbounded Petri nets.
If the net is partially reversible the method proposes
a bound vector covering all reachable markings in a
reversible subset of the reachability set. Moreover,
we explain the controller presented in (Aybar et al.,
2005) which enforces reversibility at each times it is
used with the bound vector proposed by our method.
2 PRELIMINARIES
2.1 Notations of Petri Nets
A Petri net is denoted by five tuple
G(P, T, N, O, m
0
), where P is the set of places, T is
the set of transitions, N : P × T → Z is the input
matrix that specifies the weights of arcs directed from
places to transitions, O : P × T → Z is the output
matrix that specifies the weights of arcs directed
from transitions to places, where Z is the set of
non-negative integer numbers, and m
0
is the initial
marking.
M : P → Z is a marking vector in other words
marking, M(p) indicates the number of tokens as-
signed by marking M to place p. A transition t ∈ T
is enabled if and only if M(p) ≥ N(p, t) for all
p ∈ P . A firing sequence g is a sequence of enabled
transitions t
1
t
2
. . . t
k
, where t
1
, t
2
, . . . , t
k
∈ T . A
marking M
′
is said to be reachable from M if there
exists a firing sequence starting from M (i.e., the first
transition of the sequence fires at M) and yielding
M
′
(i.e., the final transition of the sequence yields
M
′
). The set denoted by R(G, M ) is the set of all
marking vectors reachable from M . R(G, m
0
) is
181
Apaydın Özkan H. and Aybar A. (2005).
REVERSIBILITY ENFORCEMENT FOR UNBOUNDED PETRI NETS.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 181-186
DOI: 10.5220/0001180501810186
Copyright
c
SciTePress

called as reachability set of the Petri net. We let
E(G, M) to denote the set of transitions which are
enabled at M ∈ R(G, m
0
). For a Petri net, we also
let ρ(M, g) to denote the transition function, which
gives the yielded marking when the sequence g fires
starting from M (ρ is in fact a partial function, since
it is not defined if g contains transitions which are not
enabled) (Aybar and
˙
Iftar, 2003). If M
′
= ρ(M, g),
then M
′
= M + (O − N)U = M + AU. Here; M
and M
′
are markings, N and O are input and output
matrices respectively, A := O − N is incidence
matrix and U : T → Z is firing count vector whose
jth element indicates how many times t
j
is fired in g.
Let us remember some behavioral properties
related to the discussion of this work. G is said
to be K-bounded, if M (p) ≤ K(p), ∀p ∈ P ,
∀M ∈ R(G, m
0
) (K : P → Z), G is said to be
bounded if it is K-bounded for some K : P → Z.
Otherwise G is unbounded. G is said to be reversible
if m
0
∈ R(G, M), ∀M ∈ R(G, m
0
). G is said
to be partially reversible if m
0
∈ R(G, M ) for at
least one M ∈ R(G, m
0
) such that M 6= m
0
. Note
that, if a Petri net is partially reversible, there exists
a reversible subset of R(G, m
0
) and it is possible
to find a bound vector covering all markings in this
subset. It is possible to enforce reversibility of the net
by using this bound vector with the controller in (Ay-
bar et al., 2005). Therefore, we say that this bound
vector guarantees reversibility for the considered net.
Deadlock is said to occur in a Petri net if there exists
M ∈ R(G, m
0
) such that no transition t ∈ T can
fire at M (Desrochers and Al-Jaar, 1995). A marking
˜
M covers a marking M if
˜
M(p) ≥ M (p), ∀p ∈ P .
A marking
˜
M dominates a marking M , if
˜
M covers
M and M 6=
˜
M. That is denoted by
˜
M >
d
M.
If
˜
M >
d
M and E(G, M) = E(G,
˜
M), then
ρ(
˜
M, t) >
d
ρ(M, t), ∀t ∈ E(G, M) (Cassandras
and Lafortune, 1999).
The behavioral properties of Petri nets are com-
monly explained by using reachability set. Since
unbounded Petri nets have infinite number of reach-
able markings, the coverability tree (CT) is used to
analyse some behavioral properties instead of the
reachability set. CT is drawn as a tree, where each
node of tree either explicitly represents a reachable
marking of m
0
or covers a reachable marking of m
0
through w notation. If there exists a w notation at a
place of a marking in the CT, this place is unbounded
place and this Petri net is unbounded (Desrochers and
Al-Jaar, 1995). Note that since the representation of
an infinite set is finite, an infinite number of markings
must be mapped onto the same representation in the
CT.
In this paper an algorithm in (Zhou and DiCe-
sare, 1993) (Algorithm 5.1 on page 104) is used to
construct CT.
3 REVERSIBILITY FOR
UNBOUNDED PETRI NETS
Some works have been presented about reversibility
of Petri nets (Peterson, 1981; Desrochers and Al-Jaar,
1995; Jeng et al., 2002). But none of them has abil-
ity of testing partially reversibility of unbounded Petri
nets.
In this section we will explain a method, called Par-
tially Reversibility Testing Method (PRTM). PRTM
tests partially reversibility of unbounded Petri nets
and yields a bound vector guaranting reversibility for
the considered net. To facilitate discussion of the
method, we first give the following explanations and
Lemma 1.
Let R
′
be a set of marking vectors such that R
′
:=
{M ∈ R(G, m
0
) | ρ(M, t) = m
0
, t ∈ T } then
M(p) = m
0
(p) ± a, a ∈ {0, 1...ν
p
}, ∀p ∈ P . This
means ∀M ∈ R
′
, M(p) ≤ m
0
(p) + ν
p
, ∀p ∈ P .
Here ν
p
denotes the maximum number of token vari-
ation in place p by firing any enabled transition. It can
be determined for each place p ∈ P by the following
way:
ν
p
= max
t∈T
(N(p, t), O(p, t)) (1)
Note that, if M(p) > m
0
(p) + ν
p
for at least one
p ∈ P , then M 6∈ R
′
.
Lemma 1: If there exists a marking M ∈ R
′
such
that M 6= m
0
, Petri net is partially reversible. Other-
wise, Petri net is not partially reversible.
Proof: In a Petri net, each of the marking vector
M satisfiying ρ(M, t) = m
0
are the members of
the set R
′
. So, if there exists M ∈ R
′
such that
M 6= m
0
, Petri net is partially reversible. If there
exists no M ∈ R(G, m
0
) such that ρ(M, t) = m
0
and M 6= m
0
(there exists no marking M ∈ R
′
such
that M 6= m
0
), then there exists no
˜
M ∈ R(G, m
0
)
such that ρ(
˜
M, g) = m
0
. Hence Petri net is not par-
tially reversible. ⋄
Although we do not know the reachability set for
unbounded Petri nets; as a result of Lemma 1, we
know that R
′
must have a marking vector other than
m
0
for the presence of partially reversibility. There-
fore, it is efficient to determine only R
′
set of the
Petri net to test partially reversibility and one does
not need to construct all reachability set for this test.
PRTM tests partially reversibility of the considered
unbounded Petri net by using this fact. It is possi-
ble to find a bound vector guaranting reversibility for
a Petri net, iff the net is partially reversible. Hence,
PRTM proposes a bound vector guaranting reversibil-
ity, if the considered net is partially reversible.
At the first step, PRTM determines unbounded
places of the Petri net by using the CT and begins
obtaining reachable markings from m
0
by firing tran-
sitions. In fact, for any unbounded Petri net it is
ICINCO 2005 - ROBOTICS AND AUTOMATION
182

possible to construct sets of reachable markings such
that markings in each set are obtained by firing tran-
sitions or transition sequences from markings in the
one previous generated set and each marking in each
set dominates one of the marking in the one previous
generated set (Cassandras and Lafortune, 1999). The
method determines these sets (R
1
, R
2
, R
3
...) step
by step. When it finds a set R
i
such that ∀M ∈ R
i
there exists a ˜p ∈
˜
P (
˜
P denotes the set of unbounded
places) such that M(˜p) > m
0
(˜p) + ν
˜p
, this means
R
i
∩R
′
= ∅. Then, the method obtains a set
˜
R includ-
ing all of the markings obtained from m
0
to that point,
i.e
˜
R =
S
i−1
j=0
R
j
. Since ∀i ∈ {1, 2, ...}, each of the
markings in R
i+1
will dominate one of the marking
in R
i
, R
′
of the Petri net is a subset of
˜
R and it is
determined by searching the markings M ∈
˜
R such
that ρ(M, t) = m
0
. If there exists a marking M ∈ R
′
such that M 6= m
0
, this Petri net is partially reversible
(see, Lemma 1) and PRTM proposes a bound vector
covering all of the markings in
˜
R for guaranting re-
versibility of the Petri net. Otherwise, Petri net is not
partially reversible (see, Lemma 1) and it is impossi-
ble to guarantee reversibility. Hence, the method does
not propose any bound vector.
3.1 Algorithms
In this section, the algorithm for PRTM, which is
explained in Section 3, is presented with the help of a
motivation example.
The main algorithm for PRTM is named
Main[G, M] (see, Appendix A). In this algo-
rithm; first the set of unbounded places of a Petri
net is determined by the function
˜
P = C
T
(G)
which finds the set of unbounded places (
˜
P ) of
Petri net by constructing CT; for the Petri net
shown in Figure 1, the set of vectors in the CT is
{[2 1 0]
T
, [1 2 1]
T
, [3 0 0]
T
, [0 3 2]
T
, [2 1 w]
T
,
[1 2 w]
T
, [3 0 w]
T
, [0 3 w]
T
} and
˜
P = {p
3
}. Then
the set R
′
of Petri net is determined by the algorithm
Rprime[G, M,
˜
P ]. If there exists M ∈ R
′
such
that M 6= m
0
, Petri net is partially reversible and
a bound vector guaranting reversibility of the net
is determined. Otherwise Petri net is not partially
reversible (see, Lemma 1) and the algorithm is halted.
Main[G, M] algorithm calls Rprime[G, M,
˜
P ] to construct R
′
set of Petri net (see, Appendix A).
At this algorithm, the sets R
1
, R
2
, ... are the sets of
markings and each of these sets are obtained by firing
transitions or transition sequences from markings in
the previous set. Each marking in each set dominates
one of the marking in the one previous set, i.e, R
i+1
is obtained by firing transitions from R
i
, and each of
the markings in R
i+1
dominates one of the marking
in R
i
, i ∈ Z. For the construction of these sets;
Figure 1: Motivation example (Proth and Xie, 1996)
Figure 2: Obtained markings of Petri net in Figure 1
first, all enabled transitions are fired from m
0
. This
leads new markings. The new markings which are
previously generated are labeled as old. The new
markings which are deadlock are labeled as dead. If
on the path
˜
M = ρ(m
0
, g) (path from m
0
to a new
marking
˜
M), there exists a marking M such that,
˜
M >
d
M, and E(G, M) = E(G,
˜
M), then
˜
M is la-
beled as root (ρ(
˜
M, t) >
d
ρ(M, t), ∀t ∈ E(G, M)).
From markings which are not labeled as old, dead
or root, we continue firing transitions and obtain
new markings. If all of the enabled transitions of a
marking are fired, this marking is labeled as cnt. This
process is proceed until there exists no nolabeled
markings. Then, except old labeled markings, all
of the markings obtained from m
0
at this process
construct the set R
0
and the root labeled markings in
R
0
construct the set SM
0
. Then a new cycle begins
by firing enable transitions of each markings in SM
0
.
As before, until there exists no nolabeled marking,
new markings are obtained and they are labeled. But
after that point rule of labeling as root changes: a
new marking
˜
M is labeled as root if there exists a
marking M in the set SM
0
such that,
˜
M >
d
M
and E(G, M) = E(G,
˜
M). Then, except old labeled
markings, all the markings obtained from SM
0
at
this process construct the set R
1
and the root labeled
markings in R
1
construct the set SM
1
. If ∀M ∈ R
1
,
REVERSIBILITY ENFORCEMENT FOR UNBOUNDED PETRI NETS
183

there exists a ˜p ∈
˜
P such that,
M(˜p) > m
0
(˜p) + ν
˜p
, (R
1
∩ R
′
= ∅) (2)
all of the markings in the set R
i
(i > 1) also sat-
isfy equation (2). This means, none of the mark-
ings which will be obtained can not be a new mem-
ber of the set R
′
of Petri net. Then a set
˜
R (R
′
⊂
˜
R) is obtained, i.e.
˜
R = R
0
, and the set R
′
of Petri net is determined by searching the mark-
ings in
˜
R satisfying ρ(M, t) = m
0
, t ∈ T . For
the motivation example, the set R
0
is determined as
{[2 1 0]
T
, [1 2 1]
T
, [3 0 0]
T
, [0 3 2]
T
, [2 1 1]
T
,
[1 2 2]
T
, [3 0 1]
T
} (see, Figure 2). Since some
markings in the set R
0
do not satisfy equation
(2), i.e [2 1 1]
T
; from markings in the set R
0
,
a new set is constructed as R
1
= {[0 3 3]
T
,
[1 2 3]
T
, [3 0 2]
T
, [2 1 2]
T
} (see, Figure 2). Note
that, each of the markings in R
1
dominates one of the
marking in R
0
. Since all markings in R
1
satisfy equa-
tion (2),
˜
R = R
0
. By searching the markings M in
˜
R such that ρ(M, t) = m
0
, the set R
′
is obtained as
R
′
= {[1 2 1]
T
} for the Petri net shown in Figure 1.
If some of the markings of R
1
of a Petri net do not
satisfy equation (2), from each markings in SM
1
their
enabled transitions are fired. By this way, new mark-
ings are obtained and the sets SM
2
and R
2
are con-
structed (except old labeled markings, all of the mark-
ings obtained from markings in SM
1
at this process
construct the set R
2
and the root labeled markings
in R
1
construct the set SM
2
). This process is proceed
until a set R
i
satisfying equation (2) is obtained. Then
a set
˜
R (R
′
⊂
˜
R) is obtained, i.e.
˜
R =
S
i−1
j=0
R
j
, and
the set R
′
of Petri net is determined by searching the
markings in
˜
R such that ρ(M, t) = m
0
.
If there exists M ∈ R
′
such that M 6= m
0
, Petri net
is partially reversible and Main[G, M] algorithm de-
termines a bound vector K covering all of the mark-
ings in
˜
R and guaranting reversibility of Petri net. For
the motivation example, the set R
′
is determined as
{[1 2 1]
T
}. Since [1 2 1]
T
6= m
0
, Petri net is par-
tially reversible. The set of markings including all of
the markings on the path ρ(m
0
, g) = [1 2 1]
T
is a
reversible subset of the reachability set. Since
˜
R in-
cludes this set, the bound vector [3 3 2]
T
covering all
markings in
˜
R guarantees reversibility of this net.
If there exists no M ∈ R
′
such that M 6= m
0
,
Petri net is not partially reversible and any bound vec-
tor is not determined by the algorithm Main[G, M ].
Because, there exists no M ∈ R(G, m
0
) such that
ρ(M, g) = m
0
, if a Petri net is not partially reversible.
Therefore, any K can not guarantee reversibility of
the net.
Theorem 1: The bound vector K obtained by the al-
gorithm Main[G, M] guarantees reversibility for un-
bounded Petri net G.
Proof: If a marking M such that M 6= m
0
is a mem-
ber of R
′
, then Petri net is partially reversible and a
bound vector K is determined. Since K covers not
only all of the markings in R
′
but also all of the mark-
ings on the path from m
0
to each markings in R
′
(K
covers all of the markings in
˜
R), it covers all of the
markings in a reversible subset of the reachability set
of the Petri net and it guarantees reversibility. ⋄
4 A CONTROLLER TO ENFORCE
REVERSIBILITY
In (Aybar et al., 2005), some algorithms and a con-
troller have been presented to enforce boundedness,
reversibility and liveness. In that work; initially, with
an arbitrarily chosen bound vector, a bounded reach-
ability set of an unbounded Petri net has been deter-
mined; then, the reversible subset of that bounded set
is constructed by using developed algorithms. Since
obtained reversible set may be empty, reversibility can
not be enforced by the controller everytimes.
If the considered unbounded Petri net is partially
reversible, PRTM presented in the Section 3 obtains
a bound vector, K, which guarantees reversibility for
unbounded Petri nets. By running the developed algo-
rithms in (Aybar et al., 2005) with the obtained bound
vector gives a reversible subset of the reachability set
of considered unbounded Petri net. So it is possible
to enforce reversibility for this net by using controller
presented in (Aybar et al., 2005). In this section that
controller will be explained.
If a bound vector K is obtained by PRTM, Petri
net is partially reversible and it is possible to enforce
reversibility for this net by a controller. K bounded
reachability set is found by the algorithm named
Bounded-Set (Aybar et al., 2005), i.e. RB=Bounded-
Set(G, K). Here, K and G are the inputs of the algo-
rithm and represent the bound vector and definition of
the Petri net, respectively; RB is the output of the al-
gorithm and represents K bounded reachability set of
G. Reversible subset of RB is found by the algorithm
named Reversible-Set, i.e. Rr=Reversible-Set(RB)
where R
r
is the reversible subset of RB. Note that,
since K guarantees reversibility, R
r
6= ∅. Then, it
is known that if a Petri net is partially reversible, the
controller c(M, t) below enforces boundedness and
reversibility of the net (Aybar et al., 2005).
c(M, t) =
1, if ρ(M, t) ∈ R
r
0, otherwise
(3)
where, M ∈ R(G, m
0
), t ∈ E(G, M). If c(M, t) =
1, then ρ(M, t) ∈ R
r
and firing transition t from
marking M is allowed. If c(M, t) = 0, then
ρ(M, t) /∈ R
r
and firing transition t from marking
M is forbidden.
ICINCO 2005 - ROBOTICS AND AUTOMATION
184
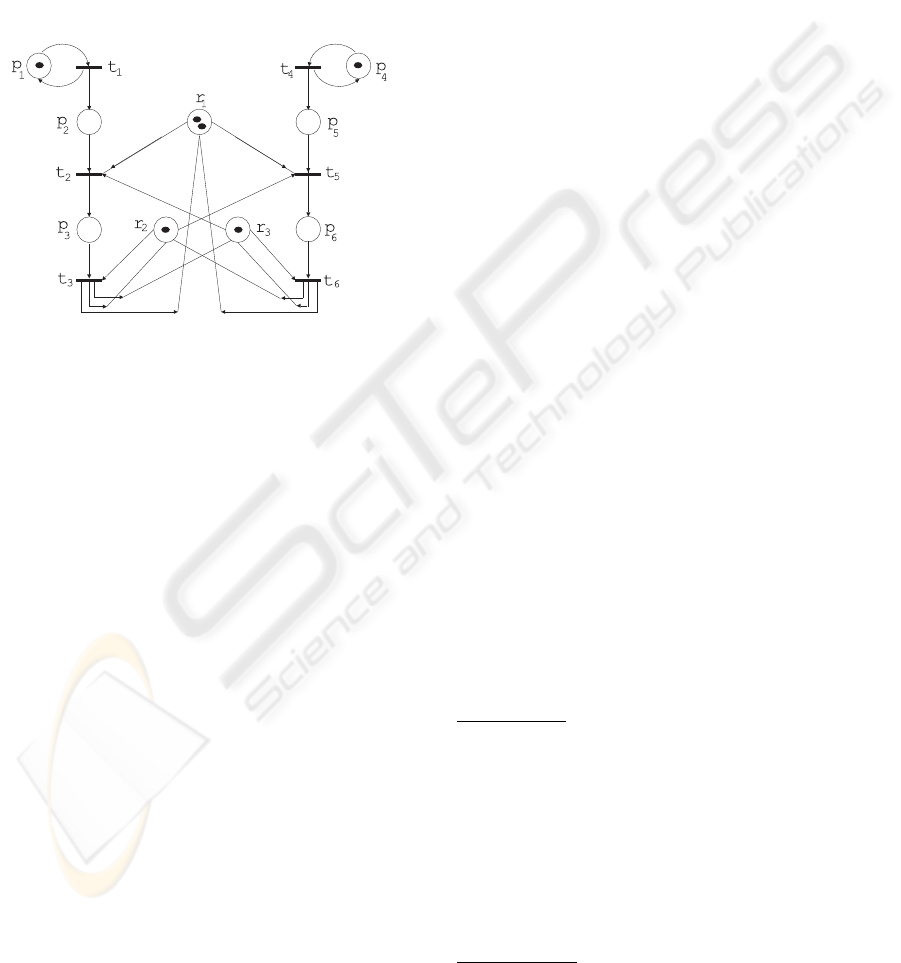
5 EXAMPLE
Let us consider a Petri net modelled manufacturing
system borrowed from (Proth and Xie, 1996) as an
example. The Petri net model of this system is pre-
sented in Figure 3. Since the weights of arcs are unity,
ν
p
= 1, ∀p ∈ P . For this Petri net, the set of places
P = {p
1
, p
2
, p
3
, r
1
, r
2
, r
3
, p
4
, p
5
, p
6
}, the set of
transitions T = {t
1
, t
2
, t
3
, t
4
, t
5
, t
6
}, and the initial
marking is m
0
= [1 0 0 2 1 1 1 0 0]
T
. At the first step,
Figure 3: Example Petri net.
the algorithm Main[G, M] calls the function C
T
(G)
to find the unbounded places. Since there exists w
notation at some places (p
2
, p
5
) of some markings at
CT of this Petri net (Apaydın-
¨
Ozkan, 2005), the set of
unbounded places of this net is
˜
P = {p
2
, p
5
}. Then
Main[G, M] calls the algorithm Rprime[G, M,
˜
P ]
to obtain a set including R
′
set of Petri net and R
′
it-
self. For this purpose first R
0
then R
1
are obtained
(|R
0
| = 16, |R
1
| = 41, here | ∗ | denotes the number
of elements of set “∗”). Since R
1
does not satisfy
equation (2), process continues and R
2
is obtained
(|R
2
| = 63). ∀M ∈ R
2
, R
2
satisfies equation (2).
This means, R
2
∩ R
′
= ∅ and all the members of
R
′
are obtained (R
i
∩ R
′
= ∅, i ∈ {2, 3, 4, 5...}).
Then a set
˜
R including R
′
of Petri net is obtained as
˜
R = R
0
∪ R
1
(|
˜
R| = 57). Through the markings in
the set
˜
R, only markings M
1
= [1 0 1 1 1 0 1 0 0]
T
and M
2
= [1 0 0 1 0 1 1 0 1]
T
reach to m
0
by firing only one transition, i.e. ρ(M
1
, t
3
) =
m
0
, ρ(M
2
, t
6
) = m
0
. Hence, R
′
is determined as
{M
1
, M
2
}. Since there exist some M ∈ R
′
such
that M 6= m
0
(M
1
6= m
0
, M
2
6= m
0
), Petri net
is partially reversible and Main[G, M] determines
the vector K = [1 4 1 2 1 1 1 4 1]
T
covering
all of the markings in the set
˜
R. The bounded set
RB, which is obtained by RB=Bounded-Set(G, K),
is partially reversible and the reversible set R
r
, which
is obtained by Rr=Reversible-Set(RB), is not empty
(|RB| = 100, |R
r
| = 75)
1
. As a result, ob-
tained K guarantees reversibility of the Petri net. Ad-
ditionally the controller c(M, t) enforces not only
boundedness but also reversibility for this net. If
we were to give two specific cases as an exam-
ple, c([1 2 0 2 1 1 1 2 0]
T
, t
1
) = 1 since
ρ([1 2 0 2 1 1 1 2 0]
T
, t
1
) = [1 3 0 2 1 1 1 2 0]
T
∈
R
r
; c([1 4 0 1 0 1 1 4 1]
T
, t
4
) = 0 since
ρ([1 4 0 1 0 1 1 4 1]
T
, t
4
) = [1 4 0 1 0 1 1 5 1]
T
/∈ R
r
.
6 CONCLUSION
In this work, we consider partially reversibility and re-
versibility enforcement for unbounded Petri nets. For
this purpose, a method and its corresponding algo-
rithm is developed. By using the algorithm, it is deter-
mined whether considered unbounded Petri net is par-
tially reversible or not. If it is partially reversible, the
algorithm determines a bound vector guaranting re-
versibility and the controller c(M, t) enforces bound-
edness and reversibility of this net. If the Petri net
is not partially reversible, algorithm does not find a
bound vector and reversibility can not be enforced for
this Petri net.
In this work, a Matlab program is also developed to
simulate the presented algorithm.
Further research is underway to use T-invariants
(see, section 5.6 in (Desrochers and Al-Jaar, 1995))
for testing partially reversibility and reversibility en-
forcement of Petri nets. Only the Petri nets with con-
trollable transitions are the subjects under the discuss
in this work, this approach may be extended to Petri
nets with controllable and uncontrollable transitions.
APPENDICES
A) Algorithms for PRTM
Main [G,M]
˜
P = C
T
[G];
<
˜
R, R
′
>=Rprime[G, p
i
];
If (6 ∃M ∈ R
′
such that
M 6= m
0
) Then
“Petri net is not partially reversible”
Exit Main
Else
“Petri net is partially reversible”
For ( i = 1 : |P |)
K(i) = max
M∈
˜
R
(M([P ]
i
));
End
1
The sets R
0
, R
1
, R
2
, RB and R
r
of the example Petri
net are not given here due to space limitations. But one can
see them in (Apaydın-
¨
Ozkan, 2005).
REVERSIBILITY ENFORCEMENT FOR UNBOUNDED PETRI NETS
185

End
Return K
Rprime[G, M,
˜
P ]
i = 0; SM
0
= ∅;
For each ˜p ∈
˜
P determine ν
˜p
;
Do loop Rtilde
If (
i=0
) Then
R
i
=m
0
;
Else
R
i
=SM
i−1
;
End
Do loop R
x
set
Select a nolabeled marking M from R
i
;
If (M
is previously generated
) Then
Label M as old; R
i
= R
i
\{M};
Else If (E(G, M) = ∅) Then
Label M as dead;
Else If (i = 0 && ∃
˜
M
on the path from
m
0
to
M,
such that
M >
d
˜
M
,
E(G, M) = E(G,
˜
M))Then
Label M as root; SM
i
= SM
i
∪ {M};
Else If (i > 0 && ∃
˜
M ∈ SM
i−1
such that
M >
d
˜
M E(G, M) = E(G,
˜
M)) Then
Label M as root; SM
i
= SM
i
∪ {M};
Else
Fire each transition in E(G, M) from M;
Add each obtained marking vector to set R
i
;
Label M as cnt;
End
If (6 ∃
nolabeled marking in
R
i
) Then
If (i 6= 0)Then
R
i
= R
i
\SM
i−1
;
End
Exit R
x
set
End
LoopR
x
set
If (∀M ∈ R
i
∃˜p
in
˜
P
such that
M(˜p) > m
0
(˜p) + ν
˜p
) Then
˜
R =
S
i−1
j=0
R
j
;
Exit Rtilde
End
i = i + 1;
R
i
= ∅; SM
i
= ∅;
Loop Rtilde
For (i = 1 : |
˜
R|)
If (∃ t ∈ T
such that
ρ([
˜
R]
i
, t) = m
0
) Then
R
′
= R
′
∪ [
˜
R]
i
;
End
End
Return R
′
˜
R
B) Notation used in the presentation of algoritms:
For a set X, |X| denotes the number of elements of
set X and [X]
i
denotes the ith element of X (i =
1, 2, ..., |X|). All the sets are assumed to be ordered.
If a new element is added to a set size m, the new
element is taken as the (m + 1)th element of the set.
∪ is used to set union. If a vector X dominates a
vector Y , X >
d
Y denotes this situation. M(p
i
),
denotes the ith place of marking M. The logic “and”
operation is represented by && in the algorithms.
REFERENCES
Apaydın-
¨
Ozkan, H. (2005). Determination of bound vectors
to guarantee reversibility for unbounded Petri nets.
M.S Thesis. (in Turkish). Anadolu
¨
Universitesi, Fen
Bilimleri Enstit
¨
us
¨
u, Eskis¸ehir, Turkey.
Aybar, A. and
˙
Iftar, A. (2003). Decentralized controller de-
sign to enforce boundedness, liveness and reversibility
in Petri nets. In Proceeding CD-ROM of the European
Control Conference, Cambridge, UK.
Aybar, A.,
˙
Iftar, A., and Apaydın-
¨
Ozkan, H. (2005). Cen-
tralized and decentralized supervisory controller de-
sign to enforce boundedness, liveness and reversibil-
ity in Petri nets. International Journal of Control,
78:537–553.
Cassandras, C. G. and Lafortune, S. (1999). Introduction to
Discrete Event Systems. Kluwer Academics, Norwell,
MA.
Desrochers, A. A. and Al-Jaar, R. Y. (1995). Applications of
Petri Nets in Manufacturing Systems. The Institute of
Electrical and Electronics Engineers Inc., New York.
Jeng, M., Xie, X., and Peng, M. (2002). Process nets with
resources for manufacturing modeling and their analy-
sis. IEEE Transactions on Robotics and Automation,
18:875–889.
Peterson, J. (1981). Petri Net Theory and the Modeling of
Systems. Englewood Cliffs, NJ : Prentice-Hall, New
Jersey.
Proth, J. and Xie, X. (1996). Petri Nets: A Tool for Design
and Management of Manufacturing Systems. John Wi-
ley & Sons, West Sussex.
Zhou, M. and DiCesare, F. (1993). Petri Net Synthesis
for Discrete Event Control of Manufacturing Systems.
Kluwer Academic, Norwell, MA.
ICINCO 2005 - ROBOTICS AND AUTOMATION
186
