
INCREMENTAL LEARNING IN HIERARCHICAL NEURAL
NETWORKS FOR OBJECT RECOGNITION
Rebecca Fay, Friedhelm Schwenker and G
¨
unther Palm
University of Ulm
Department of Neural Information Processing
D-89069 Ulm, Germany
Keywords:
Object recognition, hierarchical neural networks, incremental learning.
Abstract:
Robots that perform non-trivial tasks in real-world environments are likely to encounter objects they have not
seen before. Thus the ability to learn new objects is an essential skill for advanced mobile service robots. The
model presented in this paper has the ability to learn new objects it is shown during run time. This improves
the adaptability of the approach and thus enables the robot to adjust to new situations. The intention is to verify
whether and how well hierarchical neural networks are suited for this purpose. The experiments conducted
to answer this question showed that the proposed incremental learning approach is applicable for hierarchical
neural networks and provides satisfactory classification results.
1 INTRODUCTION
When performing tasks in complex environments it
is probable that a robot is confronted with objects it
has not seen before and consequently cannot identify.
This makes the ability to learn new objects during run
time an important capability for advanced mobile ser-
vice robots. The robot is then able to incrementally
learn novel objects and thereby increase knowledge
of its environment and adapt to new situations.
Without the ability to incrementally learn new ob-
jects the robot could only deal with predetermined ob-
jects learnt offline. All other objects could only be
classified as unknown objects. In real world environ-
ments which are fairly complex and subject to numer-
ous changes solely being capable of coping with pre-
viously learnt objects might not be sufficient.
The presented approach is an extension of our pre-
vious work (Knoblauch et al., 2004) which enables
the model to deal with unknown objects by incremen-
tally learning to categorise these objects.
2 HIERARCHICAL OBJECT
RECOGNITION
The visual object recognition is implemented as a two
stage process (Fay et al., 2004) where low resolu-
tion features such as colour and shape information are
used to localise objects of potential interest and en-
suing high resolution features such as edges, corners
or T-junctions are extracted to analyse the part of the
image containing the detected object in greater detail.
These features are used in a trained neural network
for object recognition. For the application at hand ori-
entation histograms (Freeman and Roth, 1995) (Cop-
pola et al., 1998) summing up all orientations (direc-
tions of edges represented by the gradient) within the
region of interest are used as features for the object
recognition.
2.1 Hierarchical Neural Networks
If neural networks are used for object recognition an
object is represented by a number of features, which
form a d dimensional feature vector x within the
feature space X ⊆ IR
d
. A classifier therefore re-
alises a mapping from feature space X to a finite set
of classes C = {1, 2, ..., l}. A neural network is
trained to perform a classification task using super-
vised learning algorithms. A set of training examples
S := {(x
µ
, t
µ
), µ = 1, ..., M} is presented to the
network. The training set consists of M feature vec-
tors x
µ
∈ IR
d
each labelled with a class membership
t
µ
∈ C. During the training phase the network pa-
rameters are adapted to approximate this mapping as
accurately as possible. In the classification phase un-
298
Fay R., Schwenker F. and Palm G. (2005).
INCREMENTAL LEARNING IN HIERARCHICAL NEURAL NETWORKS FOR OBJECT RECOGNITION.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 298-303
DOI: 10.5220/0001182002980303
Copyright
c
SciTePress
labelled data x
µ
∈ IR
d
are presented to the trained
network. The network output K(x
µ
) = c ∈ C is in-
terpreted as an estimation of the class corresponding
to the input vector x.
The object classification is performed by a hier-
archical neural network (Fay et al., 2004). It con-
sists of several simple neural networks that are com-
bined in a tree, i.e. the nodes within the hierarchy
represent individual neural classifiers. For the ap-
plication at hand RBF networks were used as neural
classifiers. The basic idea of hierarchical neural net-
works is the hierarchical decomposition of a complex
classification problem into several less complex ones.
This yields hierarchical class grouping whereby the
decision process is split into multiple steps exploit-
ing rough to detailed classification. The hierarchy
emerges from recursive partitioning of the original
set of classes C into several disjoint subsets C
i
un-
til subsets consisting of single classes result. C
i
is
the subset of classes to be classified by node i, where
i is a recursively composed index reflecting the path
from the root node to node i. The subset C
i
of node
i is decomposed into s
i
disjoint subsets C
i,j
, where
C
i,j
⊂ C
i
, C
i
= ∪
s
i
−1
j=0
C
i,j
and C
i,j
∩ C
i,k
= ∅.
The total set of classes C
0
= C is assigned to the
root node. Consequently nodes at higher levels of
the hierarchy typically classify between larger sub-
sets of classes whereas nodes at the lowest level dis-
criminate between single classes. This divide-and-
conquer strategy yields several simple classifiers, that
are more easily manageable than one extensive clas-
sifier. These simple classifiers can be amended much
more easily to the decomposed simple classification
tasks than one classifier could be adapted to the origi-
nal complex classification task. Furthermore different
feature types X
i
are used within the hierarchy. For
each classification task the feature type that allows for
the best discrimination is chosen. An example of such
a hierarchy is shown in figure 1. The feature types X
i
and X
j
used for node i and j can be identical, i.e.
both can use the same feature type.
2.2 Hierarchy Generation
The hierarchy is generated by unsupervised k-means
clustering. In order to decompose the set of classes
C
i
assigned to one node i into s
i
disjoint subsets a
k-means clustering is performed with all data points
{x
µ
∈ X
i
|t
µ
∈ C
i
} belonging to these classes. De-
pending on the distribution of the classes across the
k-means clusters s
i
disjoint subsets C
i,j
are formed.
One successor node j corresponds to each subset. For
each successor node j again a k-means clustering is
performed to further decompose the corresponding
subset C
i,j
. The k-means clustering is performed for
each feature type. The different clusterings are eval-
uated and the clusterings which group data according
to their class labels are preferred. Since the k-means
algorithm depends on the initialisation of the clusters,
k-means clustering is performed several times per fea-
ture type. In this study the number of k-means clus-
tering per feature type was 10.
The number of clusters k must be at least the num-
ber of successor nodes or the number of subsets s
respectively but can also exceed this number. If the
number of clusters is higher than the number of suc-
cessor nodes, several clusters are grouped together so
that the number of groups equals the number of suc-
cessor nodes. For reasons of simplicity in the fol-
lowing only the case where the number of clusters k
equals the number of successor nodes s is considered.
The valuation function prefers clusterings that group
data according to their class labels. Clusterings where
data are uniformly distributed across clusters notwith-
standing their class labels receive low ratings. Fur-
thermore clusterings are preferred which evenly di-
vide the classes. Thus the valuation function rewards
unambiguity regarding the class affiliation of the data
assigned to a prototype as well as uniform distribution
regarding the number of data points assigned to each
prototype.
To generate the hierarchy at first the set of all
classes is assigned to the root node. Starting with a
clustering on the complete data set the set of classes is
divided into subsets. Each subset is assigned to a suc-
cessor node of the root node. Now the decomposition
of the subsets is continued until no further decompo-
sition is possible or until the decomposition does not
lead to a new division. An example of a classification
hierarchy is shown in figure 1.
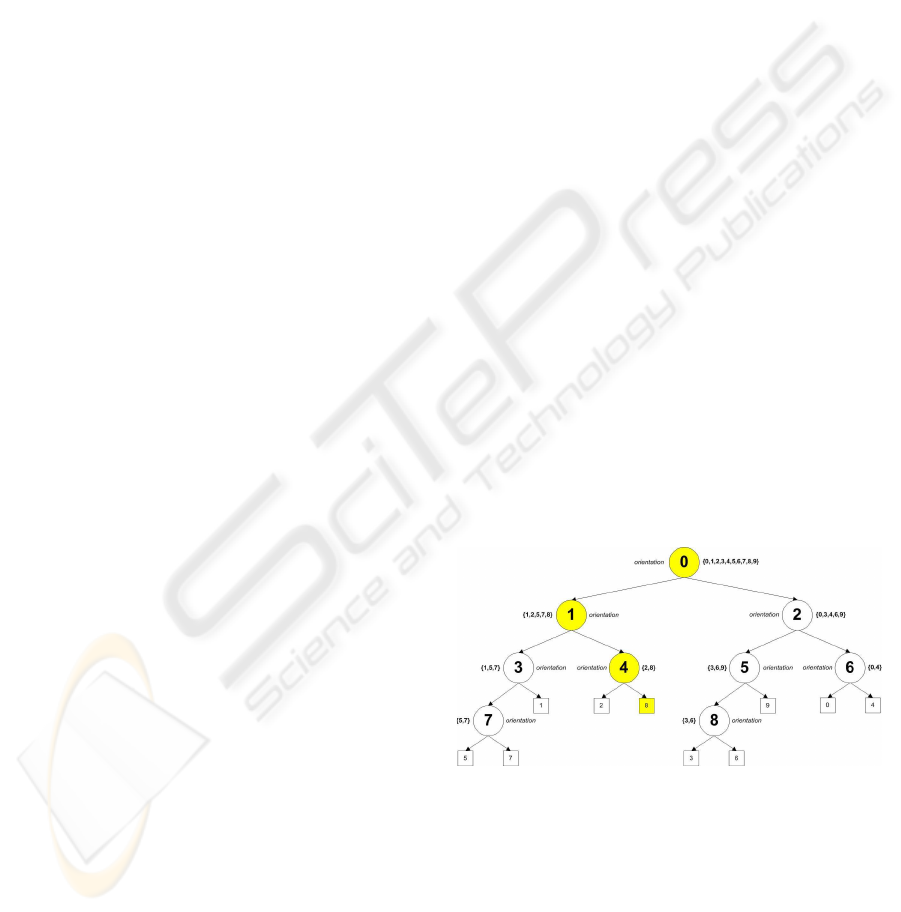
Figure 1: Classifier hierarchy generated for the classifica-
tion of 10 classes of the COIL20 data set using orientation
histograms as feature type. Each node within the hierarchy
represents a neural network which is used as a classifier.
The end nodes represent classes. To each node a feature
type and a set of classes is assigned. The corresponding
neural network uses the assigned feature type to discrim-
inate between the assigned classes. The highlighted path
shows the nodes activated during the classification of a sam-
ple that is classified as class 8.
INCREMENTAL LEARNING IN HIERARCHICAL NEURAL NETWORKS FOR OBJECT RECOGNITION
299

2.3 Training and Classification
The hierarchy is trained by separately training the in-
dividual classifiers with the data {x
µ
∈ X
i
|t
µ
∈ C
i
}
that belong to the subsets of classes assigned to each
classifier. For the training the respective feature type
X
i
identified during the hierarchy generation phase
is used. The data will be relabelled so that all data
points of the classes belonging to one subset C
i,j
have
the same label j, i.e.
˜
t
µ
= j, x
µ
∈ X
i
, t
µ
∈ C
i,j
.
The number of input nodes of the single classifiers is
defined by the dimension d
i
of the respective feature
type X
i
assigned to the corresponding node i. The
number of output nodes equals the number of succes-
sor nodes s
i
. The classifiers are trained using super-
vised learning algorithms. The classifiers within the
hierarchy can be trained independently, i.e. all classi-
fiers can be trained in parallel.
Within the hierarchy different types of classifiers
can be used. Examples of classifiers would be radial
basis function (RBF) networks, linear vector quanti-
sation classifiers (Simon et al., 2002) or support vec-
tor machines (Schwenker, 2001). We chose RBF net-
works as classifiers. They were trained with a three
phase learning algorithm (Schwenker et al., 2001).
The classification result is obtained similar to the
retrieval process in a decision tree (Duda et al., 2001).
Starting with the root node the respective feature vec-
tor of the object to be classified is presented to the
trained classifier. By means of the classification out-
put the next classifier to categorise the data point is
determined, i.e. the classifier j
∗
corresponding to
the highest output value o(j
∗
) is chosen such that
j
∗
= argmax
j=1..s
i
(o(j)). Thus a path through the
hierarchy from the root node to an end node is ob-
tained which not only represents the class of the ob-
ject but also the subsets of classes to which the ob-
ject belongs. Hence the data point is not presented to
all classifiers within the hierarchy and the hierarchi-
cal decomposition of the classification problem yields
additional intermediate information.
If only intermediate results are of interest it might
not be necessary to evaluate the complete path. In
order to solve a task it might be sufficient to know
whether the object to be recognised belongs to a set
of classes and the knowledge of the specific category
of the object might not add any value. If the task for
example is to grasp a cup, it is not necessary to dis-
tinguish between red and green cups. Moreover, when
looking for a specific object it might in some cases not
be necessary to retrieve the final classification result
if a decision at a higher level of the hierarchy already
excludes this object.
2.4 Incremental Learning of New
Classes
While performing tasks a robot is likely to encounter
unfamiliar objects. Hence the ability to learn new
objects plays an important role. Given the situa-
tion that an object is in the robot’s visual field and
it is told the name of the new object by an instruc-
tor, the robot might look at the object from different
points of view and thereby generate a few data sam-
ples
˜
S := {(x
ν
, ˜c), ν = 1, ..., N } of the new class
˜c /∈ C. So compared to the already known classes
C the number of samples N of the new class ˜c is ap-
preciably lower. This scenario forms the basis for the
incremental learning approach developed here. In the
overall system the online learning is triggered by in-
struction sentences starting with ”this is” followed by
an object name.
In order to quickly achieve results the learning is
performed in two stages. In the first stage fast but
less sophisticated methods are used to obtain initial
results, i.e. the novel objects are learnt but the recog-
nition rate might be weak. In this first stage the recog-
nition rate can be improved by using a similar method
to retrain the new object with additional data gained
by taking different views of the object. In a second
stage more complex algorithms are used to adapt the
system and to further improve the classification re-
sults. This retraining is more advanced but also more
time consuming.
At first it is necessary to identify whether the pre-
sented object is already known or not. This is accom-
plished by presenting the new data to the trained clas-
sifier and taking the strength of the classifier response
into account. Thereby a strong response is consid-
ered as an unambiguous decision and weak responses
indicate a dubious decision which could be evoked
by unknown classes or if the object to classify bears
resemblance to more than one class. The thresholds
for this are derived from the classifier responses when
testing the known data. If the new data is unambigu-
ously classified as one class c without exception it is
assumed that the object is already known and belongs
to class c. Otherwise the object is regarded as a hith-
erto unidentified object.
If an object is identified as unfamiliar it is learnt by
fitting it into the hierarchy and if necessary retraining
the affected nodes. The new class ˜c /∈ C associated
with the unknown object is inserted as a new leaf. The
position of the new leaf is determined by classifying
all new data and evaluating the corresponding paths
through the hierarchy. The leaf will be inserted where
the paths start to diverge. As complete identicalness
for all data cannot be presumed even at the root node
since the network has not been trained with this data
a certain variance needs to be considered. Otherwise
ICINCO 2005 - ROBOTICS AND AUTOMATION
300

the new leaf would in most instances be added at the
root node. Therefore the common path is successively
determined similar to retrieving the classification re-
sult. Starting with the root node all new samples are
presented to the corresponding classifier. Depending
on the classification results either the next node in the
path is determined or the search is stopped and the
new class is added as a new leaf at this node. If all
new samples x
ν
are assigned to one successor node
j by classifier i node i is added to the common path
without retraining and classifier j is the next classifier.
If not all but a significant majority of the data points
is assigned to the same successor node j this classifier
is retrained using the samples of the known objects as
well as the new samples and node i is then added to
the common path. If there is no clear decision or if
all successor nodes of node i are end nodes the new
class is added as an additional end node to this node
and the node is afterwards retrained. Because of the
way the hierarchy is built only part of the hierarchical
classifier needs to be amended. The rest of the hierar-
chy remains unchanged. Figure 2 depicts how a new
class is inserted into the hierarchy by means of the
proposed incremental learning approach.
Figure 2: Example of the incremental learning of a new
class I. At first the position where to insert the new class
is determined. Then the new class is added as a new leaf
and the affected nodes are retrained. Here the new class is
added to node 4. The classifiers 0 and 1 are retrained with
the samples of the additional class I. One additional node is
added to the output layer of classifier 4 and the classifier is
then retrained.
The retraining or incremental training of the classi-
fiers is conducted by adding a new neuron to the hid-
den layer and then retraining the output weights with
the joint sample set of old and new samples. The cen-
tre of the new prototype is determined by the mean
of all new samples. The width of the corresponding
gaussian function is set to the mean distance of the
new samples to the centre and the new output weights
are learnt by calculating the pseudo-inverse (Penrose,
1955).
A similar mechanism is applied when retraining al-
ready learnt classes. The only differences are that no
additional leaf is added and that the path through the
hierarchy is already known. The single classifiers on
this path are retrained if there are any incorrect or am-
biguous decisions.
Scenarios for retraining an already learnt class
could be when a class is only represented by few sam-
ples or the classification performance for this class
is not satisfactory. The classification rate of novel
classes is likely to be lower than the classification rate
for the previously learnt classes. Thus a retraining
of all affected nodes can yield improved classifica-
tion results once sufficient additional samples for the
novel class are available. Another reason could be
that a new instance of a class with noticeably differ-
ent characteristics has to be learnt.
The online learning phase is followed by an offline
learning phase where more sophisticated learning al-
gorithms such as three phase learning are used which
will further improve the classification performance.
All nodes to which the novel classes have been as-
signed are newly trained. These algorithms would be
too time consuming for usage during run time.
This incremental learning approach can also be
used for non-hierarchical neural networks. However,
here it is not necessary to determine the position were
to insert the new leaf as non-hierarchical networks can
be regarded as hierarchical networks consisting only
of one node, but a retraining of the complete network
takes place whereas only parts of the hierarchical net-
work is amended.
3 RESULTS
By means of classification experiments the suitabil-
ity of hierarchical neural networks for extension was
examined. It should be verified whether new classes
that are only represented by a few samples can be
learnt sufficiently well in moderate time and whether
it is possible to learn new classes without negatively
affecting the classification performance of already
learnt classes.
The incremental learning approach has been eval-
uated using the Columbia Object Image Library
(COIL20) (Nene et al., 1996) consisting of 20 ob-
jects. Therefore 10-times 10-fold cross-validation ex-
periments have been conducted on the camera images
of the COIL20 image library.
Another approach for learning new objects would
be a complete redesign of the classifier. This means
that everything learnt so far is dropped and the clas-
sifier is rebuild and trained with the joined samples
of the known and unknown objects. For the classifier
training only simple training algorithms such as two-
INCREMENTAL LEARNING IN HIERARCHICAL NEURAL NETWORKS FOR OBJECT RECOGNITION
301

phase learning (Schwenker et al., 2001) can be used as
sophisticated learning algorithms would be too time-
consuming and hence not applicable for online learn-
ing. Compared to the incremental learning approach
this method features longer training time as a com-
plete rebuild of the hierarchy and training of all nodes
within the hierarchy are required. The approach pro-
posed has been compared to this method.
In order to facilitate comparability of the results of
the different approaches for all experiments the same
division of the data for the cross-validation has been
used.
For the experiments 10 classes of the 20 classes of
the COIL20 data set were chosen to represent the fa-
miliar objects. The remaining 10 classes formed a
pool of potentially new objects. To test the incre-
mental learning approach proposed the first 10 classes
were used to generate and train a hierarchy. To train
the hierarchy sophisticated learning algorithms were
used. Here the three-phase learning for RBF networks
was used. The hierarchy structure was held constant
for reasons of comparability while the hierarchy train-
ing was subject to cross-validation. This means the
same hierarchy was trained 10 × 10 times resulting
in 100 trained hierarchies. These trained hierarchies
for the classification of the first 10 classes formed the
basis for the incremental learning experiments. Each
of the 10 new classes was then learnt incremental so
that 10 × 10 × 10 hierarchies for the classification of
11 classes emerged. For the incremental learning 10
samples of the unknown class were used compared
to 64 to 65 samples (depending on the specific cross-
validation run) of the other classes. In the test data set
all classes are represented with the same number of
samples.
With the same partition of the samples the alterna-
tive method which completely rebuilds the hierarchy
was evaluated. Therefore 10 hierarchies for the clas-
sification of 11 classes each were generated. For each
of the 10 hierarchies 10 × 10 cross validation experi-
ments were conducted.
Both approaches showed essentially the same clas-
sification quality. The incremental learning approach
had an average classification rate of 95.94 ± 2.96%
and the average classification rate of the alternative
method was 95.54 ± 2.56%. Despite being less exten-
sive the incremental learning approach achieved the
same results. Figure 3 visualises these results as box
plots.
The confusion matrix for the incremental learning
experiments displayed in figure 4 shows that although
being represented by a significantly lower number of
samples the classification rates of the new classes is
equal to the classification rates of the primarily learnt
classes.
Having a look at the positions within the hierarchy
were the new classes were added, it could be found
Figure 3: Box plot of the classification results of the two
alternative approaches for learning new classes. The classi-
fication results do not differ significantly.
Figure 4: Confusion matrix for the experiments utilising
incremental learning.
that in the most instances a class was mainly assigned
to one node. If this is not the case then at least the
class was added to nodes lying on the same path of
the hierarchy as can be observed for class 13. The
only exception to this is class 11, which is distributed
over different pathes of the hierarchy. It can also be
observed that in the majority of cases the classes were
added to nodes in deeper levels of the hierarchy. No
classes were added to the root node. Figure 5 illus-
trates for each new class how often it was added to
which node of the hierarchy shown in figure 1.
These results show that the new classes are not
added arbitrarily to the hierarchy but for each class
preferred positions emerge. The noticeable frequency
of node 8 is likely to be a characteristic of the COIL20
data set.
4 RELATED WORK
An example for other incremental learning ap-
proaches are ART networks. ART networks (Gross-
berg, 2000) (Carpenter and Grossberg, 2002) allow
for online learning of evolving data sets. If a pre-
sented sample is similar enough to an learnt proto-
type this prototype is adjusted to the sample, other-
wise a new prototype is defined by the sample. In the
ARAM model (Tan, 1995) new classes can be learnt
ICINCO 2005 - ROBOTICS AND AUTOMATION
302

Figure 5: Adding of new classes to nodes. For each of the
10 × 10 cross-validation experiments conducted for each of
the new classes 10 to 19 a leaf was added to different nodes
of the classification hierarchy. For each new class is shown
in percent to which node the corresponding leaf was added.
while preserving previously learnt classes and so the
stability-plasticity dilemma is regarded. However,
ART networks are non-hierarchical networks and they
consider new samples one at a time.
5 CONCLUSIONS
The proposed approached has proven functional. Al-
though the networks were trained with only a few
samples of the new classes they were able to classify
the new class and no considerable deterioration of the
classification results of the former classes could be
observed.
The experiments conducted showed encouraging
results. It could be proved that hierarchical neural net-
works are suitable for incremental adaption. New ob-
jects can be learnt with sufficient classification rates
and in adequate time.
The proposed approach enables the robot to deal
with varying object categories in addition to the pre-
defined categories. New objects can be learnt rather
quickly with satisfactory quality. The quality can even
be increased by retraining with additional samples
and in an offline phase sophisticated learning algo-
rithms are used to further improve the classification
quality.
ACKNOWLEDGEMENT
This research was supported in part by the Euro-
pean Union award #IST-2001-35282 of the MirrorBot
project.
REFERENCES
Carpenter, G. A. and Grossberg, S. (2002). Adaptive Res-
onance Theory. In Arbib, M., editor, The Handbook
of Brain Theory and Neural Networks, pages 87–90.
MIT Press, Cambridge, 2nd edition.
Coppola, D. M., Purves, H. R., McCoy, A. N., and Purves,
D. (1998). The distribution of oriented contours in the
real world. Proceedings of the National Academy of
Sciences USA, 95(7):4002–4006.
Duda, R. O., Hart, P. E., and Stork, D. G. (2001). Pattern
Classification. John Wiley & Sons, New York, 2nd
edition.
Fay, R., Kaufmann, U., Schwenker, F., and Palm, G. (2004).
Learning object recognition in an neurobotic system.
3rd IWK Workshop SOAVE2004 - SelfOrganization of
AdaptiVE behavior, Illmenau, Germany, pages 198–
209.
Freeman, W. T. and Roth, M. (1995). Orientation his-
tograms for hand gesture recognition. In IEEE Inter-
national Workshop on Automatic Face- and Gesture-
Recognition, pages 296–301, Z
¨
urich, Switzerland.
Grossberg, S. (2000). Adaptive resonance theory. Tech-
nical Report TR-2000-024, Center for Adaptive Sys-
tems and Department of Cognitive and Neural Sci-
ence, Boston University.
Knoblauch, A., Fay, R., Kaufmann, U., Markert, H., and
Palm, G. (2004). Associating Words to Visually
Recognized Objects. In Coradeschi, S. and Saffiotti,
A., editors, Anchoring symbols to sensor data. Papers
from the AAAI Workshop. Technical Report WS-04-03,
pages 10–16. AAAI Press, Menlo Park, California.
Nene, S. A., Nayar, S. K., and Murase, H. (1996). Columbia
object image library (coil-20). Technical Report Tech-
nical Report CUCS-005-96, Columbia University.
Penrose, R. (1955). A generalized inverse for matrices.
Mathematical Proceedings of the Cambridge Philo-
sophical Society, 51:406–413.
Schwenker, F. (2001). Solving multi-class pattern recogni-
tion problems with tree structured support vector ma-
chines. In Radig, B. and Florczyk, S., editors, Muster-
erkennung 2001, pages 283–290. Springer.
Schwenker, F., Kestler, H. A., and Palm, G. (2001). Three
learning phases for radial-basis-function networks.
Neural Networks, 14:439–458.
Simon, S., Schwenker, F., Kestler, H. A., Kraetzschmar,
G. K., and Palm, G. (2002). Hierarchical object
classification for autonomous mobile robots. In In-
ternational Conference on Artificial Neural Networks
(ICANN), pages 831–836.
Tan, A.-H. (1995). Adaptive resonance associative map.
Neural Networks, 8(3):437–446.
INCREMENTAL LEARNING IN HIERARCHICAL NEURAL NETWORKS FOR OBJECT RECOGNITION
303
