
A COMPUTER ORIENTED ALGORITHM FOR ANALYZING
LIMIT CYCLES IN DISCRETE CONTROL SYSTEMS
M. Utrilla-Manso, R. Jiménez-Martínez, R. Mallol-Poyato,
J. Sánchez-Golmayo and F. López-Ferreras
Departamento de Teoría de la Señal y Comunicaciones, Universidad de Alcalá
CRTA.Madrid-Barcelona km. 33.6, Alcalá
de Henares, Spain
Keywords: Limit cycles, quantization, discr
ete control system.
Abstract: In this paper a new and fast algorithm for characterizing the behaviour of zero-input limit cycles that can
appear in digital control systems when finite precision computer is used. This proposed algorithm suggests a
practical approach to determine the impact of these parasitic oscillations against difficult theoretical
solutions limited to simple systems and very conservatives in some cases. This algorithm is applicable to
any kind of discrete system described by its difference equations and quantized by any quantization scheme
and supply practical results in considerable less time that other exhaustive formulations. Some tables show
the feasibility of the algorithm compared with exhaustive searches and theoretical calculations to
characterize the limit cycles and its applicability for any kind of discrete system as different digital filters
and digital control systems where different controllers are applied
1 INTRODUCTION
It is known that algorithms for digital control are
implemented in microprocessors or microcontrolers
whose internal registers have a length of 8, 16 or 32
bits. This finite precision leads in errors due to the
quantization of all values to be stored, such as, input
signal, coefficients of systems and internal
calculations. Besides, the internal representation of
values in that oriented hardware is used to be in
fixed point, so the dynamic margin for values
decreases over other floating-point schemes.
That lost of information yields three important
pr
oblems for the whole system performance:
sensitivity of the coefficients, quantization errors in
each internal storage node and the output, and some
possible oscillations at the output and internal nodes
called Limit Cycles (LC). The first one is a
deterministic matter so that the quantization process
moves the poles and ceros from these original
positions. The design must guarantee that the
magnitude of quantized poles is inside unit circle
and its movement does not impair the final
performance of the algorithm. The other problems
are not deterministic matters, so the study is used to
be analytic, based on statistical considerations or by
mean of computer simulations of the system.
This paper focuses the study of one of the
pr
oblems derived from finite precision arithmetic,
the limit cycles. These are oscillations appeared at
the output and internal registers when the input is
zero or a constant. This problem can be especially
important in control systems, where the controller
could give non-zero signal to the system even
though the input signal is zero (Slaughter, 1963),
(Phillips, 1990). Greater oscillations can appear
when internal register values overflows and is not
saturated to the maximum value, so the system must
be conveniently scales to avoid this effect.
The main goal of this paper is the study and
characte
rization of possible limit cycles that can
appear at the output or internal storage nodes of the
digital control system, by mean of simulation
algorithms on a computer. The system under study is
shown in figure 1 that presents the overall system
where appears the discrete equivalent of the
controller that is usually implemented on a
microcontroler under finite precision arithmetic.
Figure 2 shows the simulated system, where only the
controller must be quantized.
Earlier studies present different structures to
estab
lish the controller (Franklin, 1997), (Ogata,
1996), (Phillips, 1990) that yield different results
155
Utrilla-Manso M., Jiménez-Martínez R., Mallol-Poyato R., Sánchez-Golmayo J. and López-Ferreras F. (2005).
A COMPUTER ORIENTED ALGORITHM FOR ANALYZING LIMIT CYCLES IN DISCRETE CONTROL SYSTEMS.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Signal Processing, Systems Modeling and
Control, pages 155-160
DOI: 10.5220/0001182401550160
Copyright
c
SciTePress

under finite precision. So the analysis of this
performance under finite arithmetic must be an
integral part of the design process.
System
Sensor
c(t)
u(t)
+
-
Difference
equations
Clock
ZOH
T
T
r(kT)
e(kT)
y(kT)
u(kT)
y(t)
A/D
Digital regulator
r(t)
Figure 1: Discrete equivalent controller
Controller
G
R
(z)
System
G(z)
Sensor
r(k)
e(k)
c(k)
y(k)
w(k)
+
-
Figure 2: Equivalent discrete for simulating in computer
Limit cycles is a topic widely studied by earlier
researchers. Up to the moment most of these studies
were theoretical approaches, looking for maximum
bounds for each internal register while a limit cycle
is present (Bauer, 1991), (Premaratne, 1995),
(Green, 1988), (Yakowitz, 1973), (Djebbari, 1998).
However these schemes need certain structures as
state space (Bauer, 1991), (Premaratne, 1995) to use
the matricial representation for calculations. Besides
they lead to conservative results and they in general
are applicable for low order filters or systems
(Slaughter, 1963), (Phillips, 1990). High order
systems are very difficult to analyse by these
methods. Earlier studies use the computer to
simulate the real behaviour of the system under
finite precision (Bauer, 1991), (Premaratne, 1995)
but they suggest exhaustive algorithms where a great
amount of state vectors are tested. Besides most of
them require certain structures, rounding strategies
and mainly are only useful for low order filters
because the high computer time they take.
In this paper a partial search algorithm is
presented, where the choice of state vectors to
analyse is strategically selected by the results
obtained up to the moment for the vectors still
analysed. The proposed algorithm is also applicable
for analysing any discrete system since the
difference equations are used to describe the real
system.
The paper is organized as follows. The section 2
shows the representation for discrete systems to be
analysed by a computer, quantization schemes and a
detailed explanation for the proposed algorithm. The
section 3 presents results that show the feasibility of
the algorithm to be used for different digital filters
and then for discrete control systems. Section 4 ends
with some conclusion for the use and applicability of
the proposed algorithm over other approaches.
2 PROPOSED ALGORITHM
2.1 Discrete system representation
To develop an algorithm for analysing zero input
limit cycles we suggest using the difference
equations to describe the performance of the digital
system. In this way we can get access to the
information of the internal representation of the
system. This is an important key to simulate the real
performance of the system for analysing not only
limit cycles but also any quantization problem like
noise and overflow in each node.
The only problem is to order the internal nodes
of the system to obtain a computable difference
equation in each node where for obtaining the
following value in we only have to consider
preceding values of other nodes (Diniz, 2002).
Complying with considerations in (Diniz, 2002) and
reordering the whole system we conclude that:
1
(1) (1) (
N
jmjmmj
m
)
m
x
kaxkbx
=
+= ⋅ ++ ⋅
∑
k
)
(1)
Where:
• N: order (number of internal computable
nodes) of the system.
• j: node of computation.
•
(1
j
xk
+
:value of j
th
node in the
following time k+1.
•
: transmission coefficients of the
branch connecting node m to j.
,
mj mj
ba
Notice the in equation (1) zero input is
considered and with conveniently ordering of
internal nodes
=0 for m≥j, so all the recurrence
equations only need values of internal signals still
calculated.
mj
a
Under fixed-point arithmetic, equation (1) turn to
(2):
$$
1
(1) (1) ()
N
jm
mj mj
m
$
m
x
kQaxkbxk
=
⎡
⎤
+= ⋅ ++ ⋅
⎢
⎥
⎣
⎦
∑
(2)
where Q is the quantization process and
is the
quantized value in node j. Note that in (2) double
precision accumulator is considered since there is
$
j
x
ICINCO 2005 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
156
only one quantization, that is the whole sum of all
products.
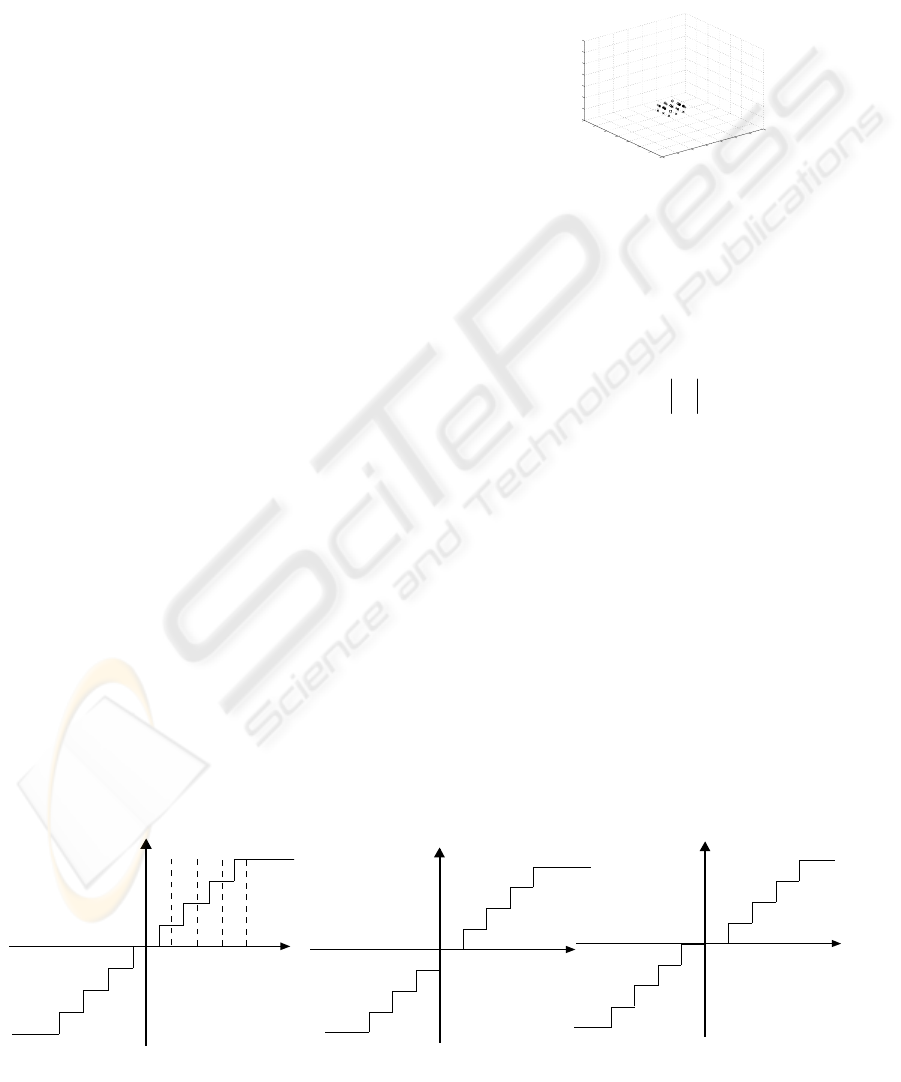
The quantization processes considered in this
paper are shown in figure 3, where
is the
quantization step size and B is the number of bits
used. Case (a) is the most natural quantization in
microcontrolers, called two’s complement truncation
1
2
B
q
−+
=
(TC2), case (b) is Signed Magnitude Truncation
(SM) and case (c) is Rounding (RD). These are the
schemes analysed in this paper but the representation
proposed allows using any other one because of
getting access to the value in each real node
programmed in the hardware.
2.2 Description of the algorithm
The proposed algorithm for checking the behaviour
of the zero input limit cycles is based on
experimental results obtained after analysing many
filters under exhaustive searches as in (Bauer, 1991),
where it has been observed that all limit cycles
detected present low amplitudes and are confined in
a closed region in the n-dimensional space (N is the
number of inner register in the filter). Figure 4
shows this typical situation (each axis shows the
amplitude stored in each register in entire multiples
of quantization step size q). This sentence meets
with demonstrated theoretical bounds on amplitude
in each internal registers obtained by some
researches (Bauer, 1991), (Premaratne, 1995),
(Green, 1988), (Yakowitz, 1973). Therefore it seems
to be not worthy to check toward limit cycles to all
possible state vectors up to a conservative theoretical
bound as in exhaustive algorithms (Bauer, 1991),
(Premaratne, 1995), (Djebbari, 1998). Checking only
a particular set of state vector could yield results
very closed to exhaustive formulations but in a
considerable less time.
The proposed algorithm tries to select a reduced
set of state vectors to test for the convergence
toward a possible limit cycle. This set will be
smaller than the one formed by all possible state
vectors up to a theoretical bound calculated for
exhaustive formulations.
For selecting this set of vectors we suggest to
divide the search process in two stages, with two
subsets of vectors: one called fixed-stage and other
called guided-stage.
The aim of the first stage is to place the search in
the region of all limit cycles are confined. This point
establishes the beginning of a more accurate search
in this confined region where probably we will find
all limit cycles.
−7
−5
−3
−1
1
3
5
7
−7
−5
−3
−1
1
3
5
7
−7
−5
−3
−1
1
3
5
7
register 1
register 2
register 3
Figure 4: state vectors reached in all limit cycles
Fixed-Stage
The main aim for this stage is to place the search in
the unknown region where it is demonstrated that all
LCs are presented (Bauer, 1991). Therefore we
choose a set of state vector for this first stage
F
γ
:
{
}
{
}
{
}
()
()
/2,0
:
0,1,..., 1; 1, 2,..., ;
nn
Fjj
n
FF
n
xx
where
nBjN
γ
γγ
⎧
=
==
⎪
⎪
⎪
=
⎨
⎪
⎪
⎪
=−=
⎩
x0
U
−
This set consist of all state vectors x with infinite
norm equal to 1 and all vectors obtained by
multiplying each element by the scalar
2 , for n
from 0 to N. Therefore the process tests more state
vectors with low infinite norms, where is more
probable that limit cycles are placed. Once this set
has been tested, the process obtains all state vectors
belonging to limit cycles, set or vectors called O,
and, from it, the maximum bound in each internal
node. That is the bound vector M. This value is the
n
2q
q
3q
4q
x
1
-1
Q [x ]
-4q
-3q
-2q
-q
(a)
2q
q
3q
4q
x
1
-1
Q [x]
-4q
-3q
-2q
-q
(b)
2q
q
3q
4q
x
1
-1
Q[x]
-4q
-3q
-2q
-q
(c)
Figure 3: quantization schemes considered
A COMPUTER ORIENTED ALGORITHM FOR ANALYZING LIMIT CYCLES IN DISCRETE CONTROL SYSTEMS
157
beginning for the next stage, suggesting that we
could find limit cycles of greater infinite norm.
Therefore now the process make a deeply search in
this region.
Guided-Stage.
As we know that all LCs are placed very closed one
to another in the N-dimensional region, where
probably we are from the first stage, this stage
suggest to test all vectors resulting of multiply all
elements of the set formed by x such as
|| || 1
∞
=
x
by n=
||
. This bound M is updated in the
stage and leads the process, so the LCs detected
guides the set of vectors to test. The process ends
when have been tested vectors with infinite norm h
times greater the maximum bound found at the
moment. In this case we consider out of the region
of LCs. So, this stage suggests a subset of vectors to
test
|| 1
∞
+M
()n
G
γ
:
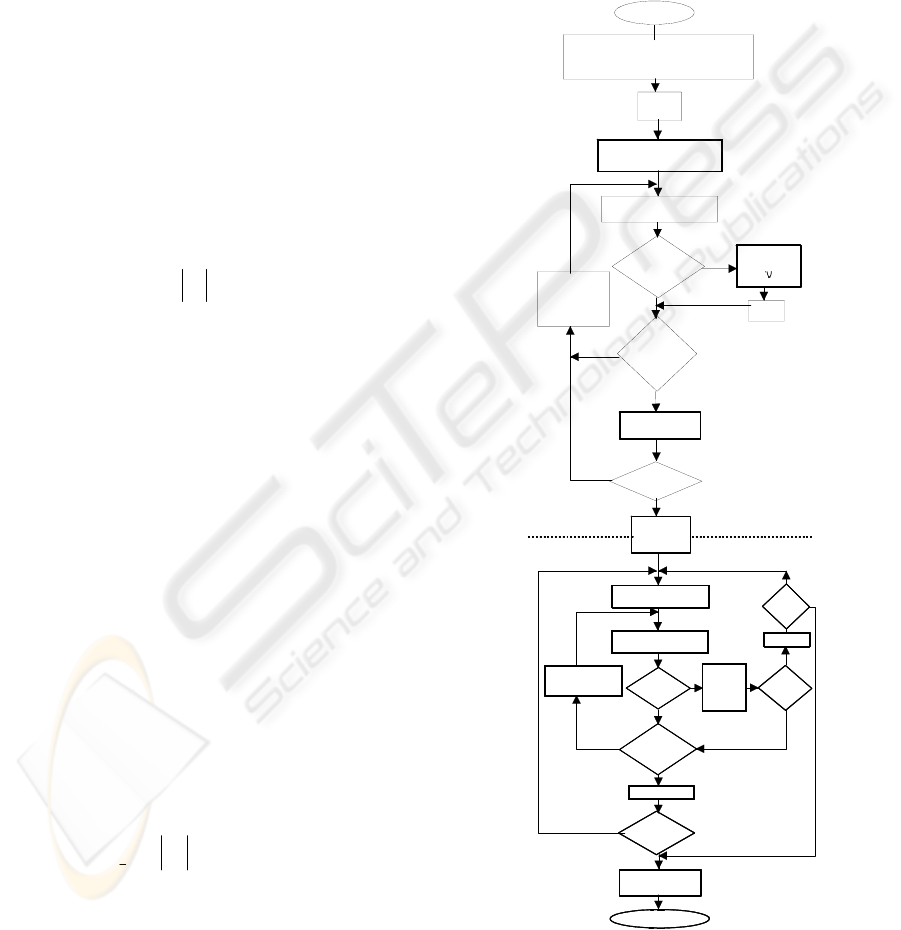
The flowchart in figure 5 shows the process, where
the nomenclature used to described it is:
B: number of bits used in implementation.
q=2
-B+1
: quantization step size. All
information in each register and output is
normalized to this number.
N: number of inner registers of the filter.
{
}
123
... ...
jN
x
xx x x=x
state vector or set
of quantized values in all internal nodes.
h: free parameter to guarantee the robustness
of the algorithm (in the results obtained h=3).
; i is the
order of the different limit cycles detected.
{}
/ belongs to a limit cycle
i
O = xx
O=
is the set of all different limit
cycles.
i
O
i
U
{
}
max
jj
xO
M
x
∀∈
=
x; =⎨x
j
⎬, j=1,2,...N;
{
}
j
M
=M
; i=1,2,...N. Practical bound.
The only problem is to detect the possible limit cycle
from a certain state vector. This is the box called
“Test of convergence” in the flowchart. We use the
procedure described (Utrilla, 2000), that is the
fastest of the papers at the moment (Bauer,
1991)(Premaratne, 1995), (Djebbari, 1998). This
procedure suggest make iterations with the
difference equations and zero input comparing with
zero vector and the initial one. If some iterations
have been made without finding anything we update
with the current state vector because probably we
are in the transient state. Considerations about
number of iterations and updating are detailed in
(Utrilla, 2000).
Input:
Type of quantization
System described by difference equations
n = 0;i=0
Generate
=
O
i
i
Limit
cycle
detected?
Generate
the next
vector in
||M||
+1
n=
Generate the first element of
(n)
Test for the convergence
Detected limit
cycle?
Tested all vectors
in
?
n = n +1
n > ||M|| +h
or
∞
End
Generate the following
vector of
Generate the
orbit
Update M
O ,
∞
n=||M|| +1
Yes
Yes
Yes
Yes
No
No
No
No
γ
Ο
j
Increased
||M|| ?
Yes
No
n > ?
∞
Evaluate O
Obtain
M
∞
G
(n)
γ
G
F
i
x
e
d
S
t
a
g
e
G
u
i
d
e
d
S
t
a
g
e
(n)
γ
G
Get the first state vector
in
(n)
γ
F
(n)
γ
F
Test for the convergence
O
OO
i=i+1
Al vectors
in
checked?
(n)
γ
F
n=n+1
Have been
checked all vectors
in ?
γ
F
Yes
Yes
Yes
No
No
No
With O, obtain M,P, C
2
B-1
n > ?
2
B-1
No
Start
{
}
{}
{
}
()
()
1
/,0,
: 1, 2,..., ; 1, 2,3,..., 2
n
Gjj
n
GG
n
B
xx n n
where j N n
γ
γγ
−
⎧
== ∈ − −
⎪
⎪
⎪
=
⎨
⎪
⎪
==
⎪
⎩
x0
U
Figure 5: Flowchart of the proposed algorithm
ICINCO 2005 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
158

The result of the whole process is a set of all
vectors belonging to LCs called O. So we can obtain
all the information we need about the behaviour of
the system on behave to limit cycles, that is
maximum practical bound M, output in LCs C and
period of them P.
3 RESULTS
3.1 Digital Filters
Due to the feasibility of the algorithm to analyze any
digital system characterized by its difference
equations, many digital filters have been analysed to
study their behaviour about LCs under different
quantization schemes. Also comparative studies
have been made with theoretical calculations
(Yakowitz, 1973) and exhaustive search algorithms
(Bauer, 1991), (Premaratne, 1995) with certain
improvements realized in (Djebbari, 1998) and
(Utrilla, 2000) for detecting a possible LC from a
state vector. Some representative results are shown
in Table 1. This table presents the too conservative
theoretical bounds on amplitude against the real
bounds obtained by exhaustive search algorithms.
However, as the table shows, this approach takes
long time analyzing irrelevant state vectors.
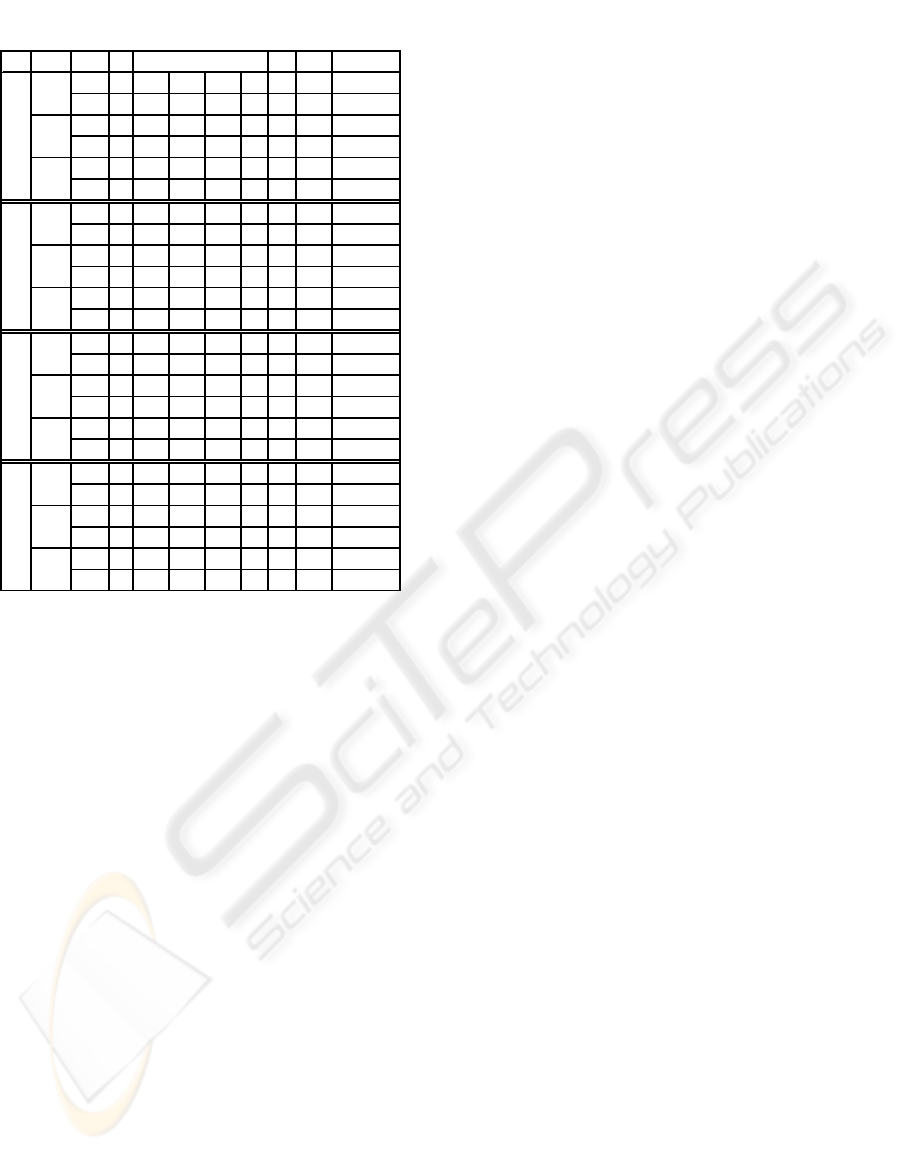
Table 1: Different digital filter analysed
This table shows the applicability of the proposed
algorithm to analyse the behaviour of any discrete
system over zero input limit cycles against
theoretical calculations and exhaustive schemes. So
it can be used as a integral part of design process
when fixed-point arithmetic is used.
3.2 Digital control systems
Digital control systems as in figure 2 can be
represented by its difference equations and therefore
can be analysed its limit cycles behaviour by the
algorithm proposed in this paper. Due to the reduced
time to analysis, it should be used to select the best
representation for the discrete controller, although
all of possible cases performs the same control under
infinite precision.
In this paper has been analysed the system
presented in the figure 6 (Slaughter, 1963)
Figure 6: Digital Control System
12
12
0.402 0.202 0.020
()
1 0.099 0.034
z
z
Dz
z
z
−
−
−−
−+
=
++
123
123
0.382 0.754 0.09
()
1 1.503 0.552 0.05
z
zz
Gz
z
zz
−−−
−−−
++
=
−+ −
()ek ()ck()rk
−
+
The controller has been implemented by
structures obtained from (Phillips, 1990) in the
known forms 1D, 2D, 3D and 4D, each analysed the
LCs under finite precission of 8 bits, saturation
(SAT) and overflow (OV) and Rounding (RD),
Two’s complement (TC2) and Signed Magnitude
(SM) truncation schemes.
The system has been implemented with two
cascade structures of 2
nd
and 1
st
order. This is no
matter due to this part of the whole system has not
been quantized since it represents a continuous time
system. But its performance has an important
influence on the whole discrete system. All these
analysis are presented on table 2, where is shown the
feasibility of the algorithm to test this type of control
systems. This table presents the maximum bound
obtained from the algorithm M (in multiples of
quantization step size q), period of the worst limit
cycle detected (T), maximum output in zero input
limit cycles (C) and time in seconds taken in the
analysis. The table shows the great difference
between the data by saturation or overflow, and
under the low amplitude of limit cycles under
saturation, as we still suggested. An important
difference is the behaviour under SM truncation,
since limit cycles are lower or even are free of them.
That is a rational event due to the characteristic of
this truncation.
Approach T C
TIME
(secs)
Theoretical 131622
Exhaustive alg. 1 1 1 3 0 23
Proposed alg. 1 1 1 3 0 0,12
Theoretical 53473119
Exhaustive alg. 2110 42 818
Proposed alg. 2110 42 0,36
Theoretical 33351721
Exhaustive alg. 1111 40 481
Proposed alg. 1111 400,701
Theoretical 3640192533
Exhaustive alg. 3444474 307
Proposed alg. 3444474 2,37
Laticce in state
varibles, Elliptic,
N=5, 16 bits TC2
Direct II Form,
chebychev, N=3, 16
bits RD
M
Transoposed Direct
Form II, Chebychev,
N=4, 16 bits TC2
Laticce in state
varibles, Elliptic,
N=4, 16 bits RD
On the other hand it is presented the different
behavior of the performance of each real
implementation of the controller and the impact over
the whole system, so it is important to establish an
analysis of the whole system as in this paper, not
only for the controller.
Due to the reduced time for analyzing these
systems, it seem to be important to introduce this
analysis as a part of the design process for choosing
the correct implementation where working under
fixed-point arithmetic.
A COMPUTER ORIENTED ALGORITHM FOR ANALYZING LIMIT CYCLES IN DISCRETE CONTROL SYSTEMS
159
N T C TIME
SAT 2 0 0 1 1 0,19
OV 7 2 4 8 115 49,781
SAT 3 0 0 9 9 0,561
OV 4 25 2 7 116 67,427
SAT 0 0 0 0 0 0,371
OV 2 23 1 1 115 14,732
SAT 3 3 3 10 3 0,41
OV 5 102 102 4 115 40,538
SAT 4 4 4 1 5 32,01
OV 5 104 104 11 116 77,492
SAT 0 0 0 0 0 0,341
OV 4 103 103 4 116 15,322
SAT53311103 23,914
OV 7 115 115 23 23 7 115 40,669
SAT5551125 124,44
OV 5 116 116 23 23 4 116 53,817
SAT0000000 7,431
OV 2 115 115 22 22 1 115 14,541
SAT 6 0 0 1 0 10 4 3,565
OV 8 13 3 19 2 5 116 329,474
SAT 7 3 1 3 0 15 13 883,591
OV 4 14 4 2 1 7 118 1350,53
SAT0000000 0,371
OV 2 12 3 19 1 4 116 161,663
4D
RD
TC2
TMS
3D
RD
TC2
TMS
M
2D
RD
TC2
TMS
RD
TC2
TMS
1D
4 CONCLUSIONS
The behaviour of discrete control systems under
finite precision applied to any data to be stored in a
real hardware is dependent on the real hardware
implementation, that is, the real discrete algorithm
stored. Many different implementations have been
early studied and they must be analized under finite
precision to guarantee the good performance in real
implementations. One of the problems under finite
precision are the possible oscillations at the output
and internal registers called limit cycles.
This paper suggests a fast algorithm for the
analysis and characterization of those limit cycles
that appear in any recursive implementation. It has
been shown that presents a less computing time than
exhaustive formulations and produce results more
accurate than theoretical calculations. Besides it is
applicable to any type of implementation and type of
quantization scheme, since it uses the difference
equation system to describe the system.
Therefore it can be used as a part of design
process to select the best real implementation for the
controller when working under fixed-point
arithmetic.
REFERENCES
Table 2: Digital Control System Analysis
Bauer, P.H.; Leclerc, L.-J., Nov. 1991. A Computer-Aided
test for the Absence of Limit Cycles in Fixed-Point
Digital Filters. In ICEIS’99, IEEE Trans. Sig. Proc.,
vol. 39, no. 11, pp. 2400-2409.
Premaratne, K.; Kulasekere, E.C.; Bauer, P.H.; Leclerc,
L.-J., 1995. An Exhaustive Search Algorithm for
Checking Limit Cycle Behavior of Digital Filters.
Proc. IEEE ISCAS, Seattle, pp. 2035-2038.
B.D. Green, L.E. Turner., 1988. New Limit Cycle Bounds
for Digital Filters. In IEEE Trans. Circuits and
System, vol. 35 ,no.4,
S. Yakowitz, S.R. Parker., 1973. Computation of bounds
for digital quantization errors In In IEEE Trans.
Circuit Theory CT.-20 (July 1973) pp. 391-396, pp.
391-396
M. Utrilla Manso, F. López Ferreras; D. Osés-del Campo,
R. Jiménez-Martínez., 2000. A DSP-Oriented Fast
Algorithm to Detect and Characterize Limit Cycles in
Digital Filters. In Problems in Modern Applied
Mathematics ISBN 960-8052-15-7, pp.198-203, Ed.
World Scientific and Engineering Society Press
D. Osés-Del Campo; F.López-Ferreras; M. Utrilla-
Manso;F.Cruz-Roldán., 2000. Fast Algorithms for the
Analysis and Characterisation of Limit Cycles in
Fixed-Point Digital Filters. In Problems in Modern
Applied Mathematics ISBN 960-8052-15-7, pp.187-
191, Ed. World Scientific and Engineering Society
Press.
A. Djebbari, M.F. Belbachir, J.M. Rouvaen., 1998. A fast
exhaustive search algorithm for checking limit cycles
in fixed-point digital filters. In Signal Processing 69,
Elsevier Science pp. 199-205
Franklin, G. F. y Powell J.D., Nov. 1997.. Digital control
of dinamics systems. Addison Wesley
Kat. Ogata., Nov. 1996. Sistemas de Control en Tiempo
Discreto. Pearson Education 2
nd
Ed.
John B. Slaughter, 1963. Quantization Errors in Digital
Control System In IEEE Transactions on Automatic
Control. pp: 69-74..
P.Diniz, E Silva and S. Netto., 2002. Digital Signal
Processing: system and analysis, Cambridge
University Press.
C.L. Phillips, H.T. Nagle, 1990, Digital Control System
Analysis and Design, 2
nd
Ed, Prentice Hall.
A. V. Oppenheim, R. W. Schafer, 1999, Discrete-Time
Signal Processing, 2
nd
Ed, Prentice Hall.
ICINCO 2005 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
160
