
REMOTE CONTROL OF MOBILE ROBOTS
IN LOW BANDWIDTH ENVIRONMENTS
Markus Sauer, Florian Zeiger, Frauke Driewer, Klaus Schilling
Informatics VII: Robotics and Telematics, Julius-Maximilians-Universität Würzburg,
Am Hubland, 97074 Würzburg, Germany
Keywords: Telerobotics, telelearning, teleoperation, low bandwidth connections, mixed reality.
Abstract: Tele-learning experiments with hardware require information about the working environment and the
equipment status as a base. Scenarios with limited bandwidth are of interest for mobile devices as well as
for users in areas with a poor telecommunication infrastructure. While camera images provide a realistic
view on the remote scene, they need a high bandwidth for quality pictures. In this context an approach to
replace transmission of video images is presented. At the example application of tele-learning experiments
with mobile robots, data about vehicle position and orientation are essential. This input is to be determined
by external tracking systems. The preprocessed sensor information can be sent via internet link even under
very low bandwidth conditions. On the students side the robot is visualized in its work space in two- or
three-dimensional virtual environments depending on the performance of the used computer. The paper
describes the external tracking as well as the remote interface enabling access to the experiments under
different conditions and reports about experiences in using this infrastructure.
1 INTRODUCTION
Remote laboratories enable students to perform
experiments with hardware equipments physically
located at distant locations via internet. Telematics
techniques (Halme, 2004, Schilling, Roth, 2001)
offer appropriate methods for remote sensor data
acquisition and tele-operation access. In tele-
education precursor experiments related to web-
robots (Goldberg, Siegwart, 2001) started in the
mid-90ies. Nowadays they are developed into
complete units for selfguided learning, including
tutorials, feedback on learning progress, integrated
simulation models of the experiment, and remote
access to the hardware equipment (Dormido, 2001,
Weinberg et al., 2003).
Advantages of tele-learning include cost
reduction, better utilization and permanent
availability of expensive hardware. The field of
mobile robots is with respect to industrial transport
robots a field of growing economic relevance, while
only in recent years textbooks with a more
consolidated theoretical basis emerged (Dudek,
Jenkin, 2000, Siegwart, Nourbakhsh, 2004). Thus
learning units including hardware experiments in
this field address a growing demand and are used in
this paper as an application example.
Figure 1: MERLIN Robot with marker.
The laboratory at University of Würzburg
operates a remote-laboratory providing experiments
controlling real mobile robot hardware (Zysko et al.,
2004a / Zysko et al., 2004b). These experiments are
fully integrated into the curriculum and familiarize
the students with problems, which occur during the
operation of real hardware instead of dealing with
idealized models. In many countries, the expansion
of the internet achieved a stage, where the available
upload and download bandwidth, even for home
connections, is high enough to run these
experiments. Nevertheless, providing access to these
163
Sauer M., Zeiger F., Driewer F. and Schilling K. (2005).
REMOTE CONTROL OF MOBILE ROBOTS IN LOW BANDWIDTH ENVIRONMENTS.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 163-168
DOI: 10.5220/0001184601630168
Copyright
c
SciTePress

remote-laboratories in regions with a poor
infrastructure or on mobile devices like PDAs or
cellular phones requires an economically use of the
available bandwidth. These environments do not
allow the transmission of a good quality video
stream due to the lack of the required connection
performance.
2 SYSTEM ARCHITECTURE
The presented approach enables the user to adapt the
display of experiment data according to the
capabilities offered by the telecommunication link.
Thus, it supports real video streams if sufficient
bandwidth is available and provides a virtual
experiment area if the available bandwidth is too
low. The pose (position + orientation data) of the
robot in its work space is determined by an external
tracking system, which combines sensor data from
different sources to reliable pose information with a
sufficient accuracy. The use of real mobile robot
hardware is fully supported and has to guarantee a
real behavior of the mobile robot and the collected
sensor data even for low bandwidth.
2.1 Remote Laboratory
The remote laboratory is tele-operated via a JAVA
applet and communicates with the robot control
server over a socket connection. The control applet
provides the user all available sensor data like
odometry or gyroscope angles. In addition, the user
can send different experiment specific control
commands for the mobile robot to the control server.
Table 1: Required bandwidth for a colored video stream
quality downlink uplink
very high 342 KB/s 9 KB/s
high 52 KB/s 4 KB/s
medium 29 KB/s 3 KB/s
low 16 KB/s 2 KB/s
minimum 14 KB/s 2 KB/s
Table 2: Required bandwidth for a grayscale video stream
quality downlink uplink
very high 248 KB/s 7 KB/s
high 47 KB/s 3 KB/s
medium 25 KB/s 2 KB/s
low 13 KB/s 2 KB/s
minimum 11 KB/s 2 KB/s
Depending on the available bandwidth, the applet
can provide a video stream of the experiment area.
The tables 1 and 2 show the required up and
downlink bandwidth for a colored and a grayscale
video with four pictures per second. If the available
bandwidth is too low, a virtual experiment area can
be shown in the applet, which is described later.
The remote laboratory itself has four main
components: the robot control server, a camera
server with camera, an external localization system,
and the mobile robot.
The experiment area is a square with a side length
of 3m. The localization systems provide an
intelligent environment for the robot, where it can
localize itself and move. They are installed in the
configuration presented in Figure 2.
VScope
AR Tracking System
MERLIN Robot
Figure 2: VScope and ARTS configuration
Using this VScope configuration, it is possible to
cover almost 75% of the area. Near the borders, the
VScope system has to be supported by other
localization methods. If the experiment area is
enlarged, two VScopes are used to provide a
sufficient coverage for position determination.
The visual tracking system is mounted in the
center above the experiment area and covers the
complete area as the camera can be moved.
The robot control server is responsible for
different activities. Besides the authentication of the
remote users the server processes the sensor data
from the robot and provides it to the control applet.
Furthermore, control commands received from the
applet are sent to the robot.
The control server includes also the module for
computing the robot's. Here, the data from the
different localization systems are combined in order
to determine the exact position of the robot inside
the experiment area.
2.2 Mobile Robot
The remote-laboratory uses the mobile robot
MERLIN (Mobile Experimental Rover for
Locomotion and Intelligent Navigation, cf. Figure
1). MERLIN was developed first as sensor test
vehicle in the European Mars rover development.
ICINCO 2005 - ROBOTICS AND AUTOMATION
164

Later, it was transferred into the educational
framework (Schilling, Meng, 2002 / Schilling et al.
2003). It is a car-like mobile robot equipped with an
Ackerman steering and two propelled rear wheels.
MERLIN is equipped with several sensors for indoor
and outdoor navigation: hall sensors, wheel
encoders, gyroscope, ultrasonic sensors, VScope
buttons, and a marker for visual tracking. All on
board computations like sensor data acquisition and
preprocessing are done with a C167 microcontroller
board. The communication between the
microcontroller board and the control server is done
via serial port.
3 ROBOT LOCALIZATION
3.1 VScope
The VScope system is capable of tracking objects in
2D or 3D environments. It consists of three
components: the VScope buttons, the VScope
towers, and the VScope microcomputer.
A VScope button has an infrared receiver and an
ultrasonic transmitter. Each button has a unique ID
and each button’s position can be determined
separately. In order to track MERLINs position and
orientation two buttons are needed.
The VScope towers have an infrared transmitter
and an ultrasonic receiver. Starting the VScope
system sends an infrared signal from each tower to
the buttons. The VScope buttons will be activated by
these signals and they start transmitting a
synchronized ultrasonic signal. The VScope towers
receive the signal of each button and send the data to
the VScope microcomputer.
The VScope microcomputer processes the data
sent by the towers and respectively the buttons, and
calculates the absolute position of each VScope
button in Cartesian coordinates. This data is
provided to a PC via serial connection.
The advantage of the VScope system is its high
accuracy. During experiments, an accuracy of the
mobile robot position of about 2mm was achieved if
both markers were in range of the VScope towers.
Unfortunately, the VScope system also has some
disadvantages. The infrared signal from the towers
to activate the VScope buttons is heavily disturbed
by sun light or even the lighting of the room. If
MERLIN is too far away from the VScope towers,
the buttons cannot be activated and determining the
position is impossible. The second disadvantage of
this localization system is the covered area. In the
3m x 3m experiment area, the VScope cannot cover
the border areas due to a limited opening angle for
transmitting and receiving the ultrasonic/infrared
signal at the buttons and towers (cf. Figure 2).
To cope with these restrictions, a visual tracking
and positioning system is installed.
3.2 Visual Tracking
The visual tracking of the MERLIN robot is realized
with the help of two passive markers. One is the
reference marker with known position and the other
one is mounted on the robot and will be tracked.
With the position and orientation estimation of these
two markers the relative position and orientation of
the tracked marker to the reference marker can be
calculated. For the tracking of the reference marker
and the tracked marker the well-known ARToolKit
(Billinghurst et al., 2001) in combination with a
modified version of the Java binding jARToolKit
(Geiger et al., 2002) adjusted for the presented
system is used. This toolkit is designed for video-
based augmented reality systems. To realize an
augmented reality system the six parameters for
position and orientation of the camera or
respectively the position of the eyes of the viewer
relatively to the environment must be determined
continuously. These must be done in addition to the
initial calibration of the camera, which delivers the
intrinsic parameters. The passive markers used by
the ARToolkit have a black frame and some special
patterns within this frame to identify the marker as
shown in Figure 1.
The workflow of the ARToolkit can be divided
into two parts. Before running the system, the
markers are taught once to the system and an initial
camera calibration is done. This information is used
to run an ARToolkit based system. During runtime
at first all black frames eligible in the camera images
and the four corresponding edges for each black
frame are detected with image processing methods.
With the intrinsic, physical camera parameters, the
defined marker size and the four detected edges of
the frame, position and orientation of the marker in
the world coordinate system relative to the camera
capturing the images is estimated. With this
estimated values the inner part of the detected
marker is normalized and the resulting data is used
to identify the marker.
The design of the ARToolkit for augmented
reality purposes, results in a number of advantages
and disadvantages. The most significant
disadvantage of the ARToolkit is that the provided
camera calibration tool of this library delivers quite
poor results for the intrinsic parameters. For
augmented reality this errors are not further
important, because the secondary use of this
parameters for the projection matrix of the virtual
REMOTE CONTROL OF MOBILE ROBOTS IN LOW BANDWIDTH ENVIRONMENTS
165

objects compensates this errors almost completely.
Nevertheless, for absolute localization of markers,
the results from the camera calibration tool without
any adjustments are not good enough. Therefore,
some mechanisms and possibilities were
implemented in the presented system to adjust these
parameters during runtime of the system.
The advantages leading to the decision of this
system are the capability to estimate position and
orientation, identify multiple markers in real-time
and the easy setup of a tracking system with the
ARToolkit and its corresponding passive markers.
In the presented work the ARToolkit is used with
a Pan-Tilt-Zoom (PTZ) camera in combination with
a TV-card from the consumer market to capture
images. The pan, tilt and zoom functionality of the
camera allows to cover a much larger area compared
to a static camera, but results also in new tasks. At
first a robust camera control module must be
implemented, that the system always knows what
are the pan, tilt and zoom values, when the camera is
moving and when the camera has an undefined state.
These pan, tilt and zoom values must be considered
when position and orientation of markers are
calculated.
The procedure of the AR tracking system
(ARTS) has two basic states. In the init state the
position and orientation matrix of the reference
matrix is determined. The best position and
orientation values are achieved, when the marker is
in the center of the camera image, because errors in
distortion correction have least influence in the
center of the image. Therefore, the ARTS always
moves the camera head to center the marker in the
camera image.
After storing the position and orientation matrix
of the reference marker, the ARTS switches to the
robot tracking mode. This matrix is used to
transform the position and orientation information of
the robot marker to position and orientation values
in the coordinate system of the experimental area. In
the robot tracking mode the reference marker is no
longer needed. The ARTS works with the predefined
parameters completely autonomous and controls the
camera head so that it automatically follows the
moving robot.
3.3 Integration of Sensor Data
For determining the pose of the robot in the
experimental area, three localization systems are
available, which have very different properties for
the generate information quality: the VScope, ARTS
and the odometry calculations of the onboard
microcontroller. Table 3 gives an overview of the
relevant properties here.
Table 3: Properties available localization systems
VScope ARTS
onboard
odometry
covered area small large large
precision high mid
low (abs. values)
high (small
relative values)
error
accumulation
no no yes
activation yes no no
An intelligent combination of the three systems
allows eliminating the specific disadvantages of
each individual system. Therefore, at first all raw
pose information from the localization systems are
transformed into the experimental field coordinate
system, with the help of default offsets depending on
the physical setup of the system. Next the most
probable pose of the mobile robot is calculated. This
is realized by using the VScope as the reference
system. As long as VScope data is available, the
calculated pose of the VScope is used and stored.
Additionally, the offset to the ARTS pose data is
calculated and stored. As soon as VScope loses
contact to the buttons on the MERLIN, the ARTS
data corrected with the last stored offset are used as
pose of the MERLIN. This allows compensating
misalignments of the experimental setup and the
offsets of the different coordinate systems, which are
inevitable. On the other hand the calculated
odometry information from the microcontroller can
be used to generate a probability based filter
selecting values from the other localization systems.
The sensor data integration presented here, allows
estimating the pose of the robot at a quality level
accomplishing the requirements for the remote
control task in the experiments.
4 REMOTE INTERFACE
The students receive access to the telelab through a
Java applet. From this applet the student needs to be
able to send control commands to the robot, change
parameters on the robot and receive sensor data, e.g.
odometry. The observation of the experimental area,
i.e. the robots real movements, in real-time and good
quality is also essential for satisfying performance of
the experiment.
As long as the available bandwidth allows
receiving video streams with sufficient quality a user
interface with camera images from the scene and the
numerical display of sensor data is adequate. As this
high bandwidth connection cannot always be
expected, the robust localization system based on
sensor data fusion of VScope, ARTS and odometer
ICINCO 2005 - ROBOTICS AND AUTOMATION
166
is used to have a representation of the data
comparable to video image.
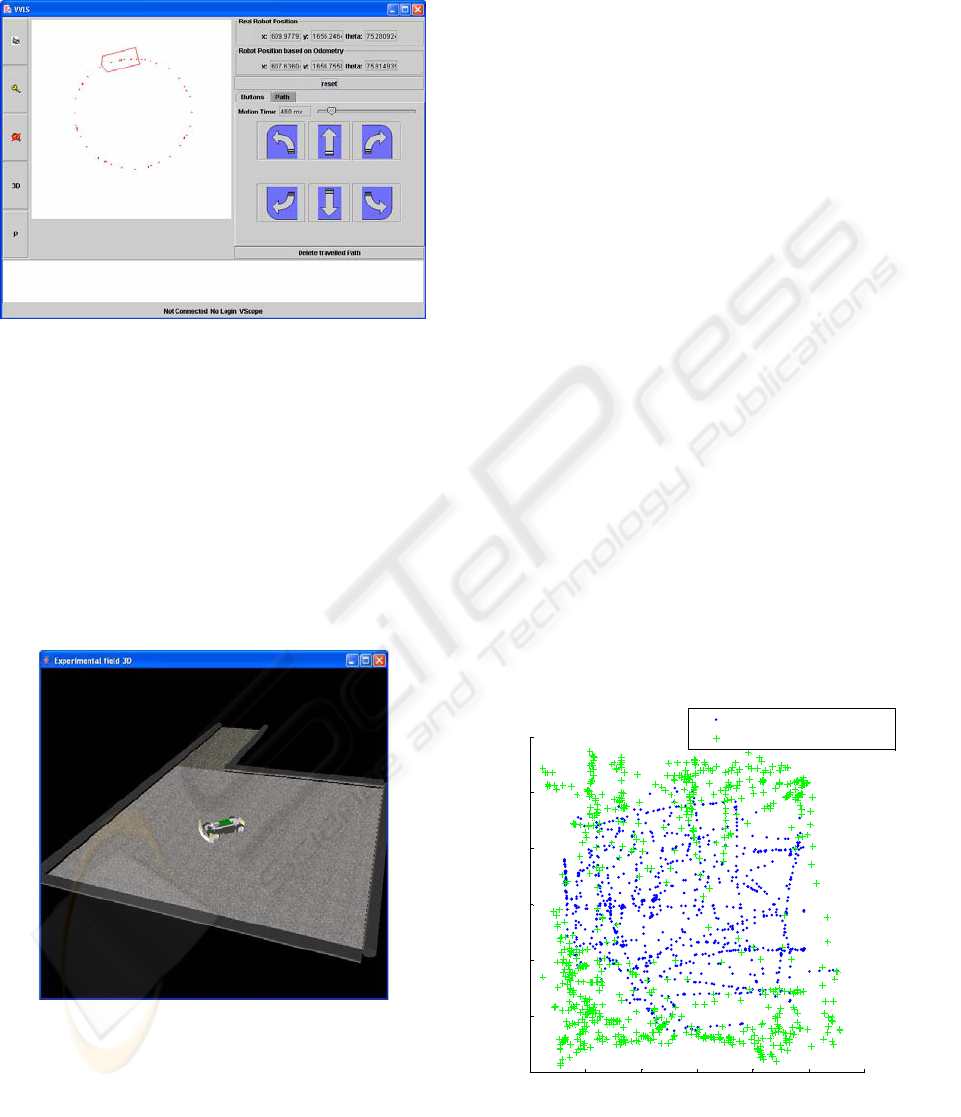
Figure 3: Applet for remote control with navigation
buttons and two-dimensional map
Figure 3 shows the remote control interface
consisting of all features of the former user interface
(Zysko et al., 2004b) and additionally a two-
dimensional map showing the position of MERLIN
in the experimental area. For those, who are able to
download the JAVA 3D library and have a computer
able to deal with 3d calculation, a three-dimensional
view on the scene is provided (cf. Figure 4).
Additionally to the solution for the problem of low
bandwidth connections, this mixed reality
representation has several other benefits.
Figure 4: 3D visualization of the robot in the test field.
The camera could not cover the complete
experimental area without using the pan and zoom
function. If the robot was moved through the
complete area, the student needed to move the
camera behind the robot. This laborious task slowed
down the experiment and decreased the motivation
of the students. The newly implemented remote
control interface based on localization data shows
the complete area in 2D. Moreover, the 3D view
allows the observation of the experiment from all
sides (viewpoints). For the camera view the
automatically following of the ARTS relieves the
student from this task.
Furthermore, the virtual views cannot only
represent the real pose of the robot. It can also show
the data received from the onboard sensors in an
intuitive way. As described in the last chapter the
odometry calculations accumulate errors and are
therefore inaccurate for longer distances.
Understanding this kind of problems with real
hardware and imperfect sensors is one goal of the
experiments. The 2D view can visualize the
difference between real pose and odometry based
pose straightforward. The 2D view displays also the
traveled path (each measured location as a dot) until
the students deletes it. This feature allows better
documentation of the experiment and helps the
student to prepare the report, e.g. by submitting
screenshots.
Moreover, the navigation of the robot, which was
previously done by six buttons for the directions, can
be improved. In the 2D view the student can enter a
path by clicking in front of the robot.
5 EVALUATION AND TEST
The localization module of the robot control server
estimates the pose of the robot. The usage of the
different tracking systems within the experimental
area is shown in Figure 5.
0 500 1000 1500 2000 2500 3000
0
500
1000
1500
2000
2500
3000
x-position [mm]
y-position [mm]
VScope position
ARTS position
Figure 5: Tracking system usage in the experimental field
REMOTE CONTROL OF MOBILE ROBOTS IN LOW BANDWIDTH ENVIRONMENTS
167

The ARTS covers the border regions of the
experimental field and is used as backup when the
VScope-Button activation fails, as it was planed in
the system design.
Our first system for the tele-laboratory was only
based on video streams as feedback from the virtual
laboratory. With this system we examined the
possibility to perform the remote-experiments from
Tianjin University in China. The available
bandwidth was about 14 Kbytes/s to 21 Kbytes/s.
This bandwidth only allows a low picture quality.
These tests and other performance tests showed that
at least medium picture quality is necessary to
provide certain usability of the experiments for the
students with the video-based system. As presented
in Table 2 a bandwidth of least 25 Kbytes/s
(downlink) and 2 Kbytes/s (uplink) for a grayscale
video stream is required.
Bandwidth tests of the system described here
with the virtual representation of the experimental
setup and the external tracking results in required
bandwidth of about 1,3 Kbytes/s for the downlink
and 0,1 Kbytes/s for the uplink. This strong
reduction of required bandwidth makes it possible
for users with even very low bandwidth internet
connection to perform the experiments.
6 CONCLUSION
The presented work demonstrates an approach to
enable tele-experiments via the internet for limited
link capabilities. This offers possibilities to perform
experiments with the equipment in our university for
remote students from all over the world.
The described system is applied and will be
further optimized in projects with Chinese and
Indian universities, but also for the local students
using modem connections from their homes. The
flexible user interface allowing operation of the
robot in two- or three-dimensional space enables the
student users to choose the optimal visualization
depending on the performance of their computer and
internet connection.
Future work will include investigations on
improved external tracking systems to cover a larger
experiment area and provide a higher precision. The
application potential of such telematics methods
extends beyond tele-learning to industrial fields like
tele-maintenance, home automation, space
exploration and service robotics.
ACKNOWLEDGEMENTS
We appreciated the financial support provided for
part of this research within the “EU-India” program
of the European Union and the PPP China program
by the German Academic Exchange Service DAAD.
REFERENCES
Billinghurst M., Kato H., Poupyrev I.,. 2001. “The
MagicBook: A Transitional AR Interface”, Computers
and Graphics, November 2001, pp. 745-753.
Dormido, S. (ed.), 2001. Proceedings IFAC Workshop on
Internet Based Control Education, Madrid 2001,
Pergamon Press
Dudek, G., Jenkin, M., 2000. Computational Principles of
Mobile Robotics, Cambridge University Press.
Geiger Ch., Paelke V., Reimann Ch., Stöcklein J.
JARToolKit - A Java Binding for ARToolKit. In Proc.
of First IEEE Workshop on AR-Toolkit, Darmstadt,
September 2002.
Goldberg, K., Siegwart R. (eds.) 2001. Beyond Webcams:
An Introduction to On-line Robots, MIT Press 2001.
Halme, A. (ed.), Proceedings IFAC Symposium on
Telematics Applications in Automation and Robotics,
Helsinki 2004, Pergamon Press 2004.
Schilling K., Popescu D., Meng Q., Roth H., 2003. Mobile
Roboter, In D. Schmid, G. Gruhler, A. Fearns (eds.),
eLearning - Experimente und Laborübungen zur
Automatisierungstechnik über das Internet, Verlag
Europa Lehrmittel, p. 137 - 146
Schilling K., Meng Q., 2002. “The MERLIN vehicles for
outdoor applications”, In SPIE conference proc.
„Unmanned Ground Vehicle Technology IV“, Orlando
2002.
Schilling, K., Roth H. (eds.), 2001. Telematics
Applications in Automation and Robotics, Proceedings
IFAC Conference, Weingarten 2001 Pergamon /
Elsevier Science.
Schilling, K., Pérez Vernet M., 2002. Field Vehicle
Teleoperations Support by Virtual Reality Interfaces.
In Proceedings of 15th IFAC World Congress,
Barcelona.
Siegwart, R. Nourbakhsh, I. R., 2004. Introduction to
Autonomous Mobile Robots, Bradford Books.
Weinberg, J. B., Yu X., 2003. Special Issue „Robotics in
Education“, IEEE Robotics & Automation Magazine,
Vol. 10, No. 2 and 3.
Zysko G., Barza R., Schilling K., 2004. Tele Lab Using
Non-holonomic Car-Like Mobile Robot, IFAC
Workshop Grenoble 2004.
Zysko G., Barza R., Schilling K., Lei Ma, Driewer F.,
2004. Remote Experiments on Kinematics and Control
of Mobile Robots, In Proceedings 5th IFAC
Symposium on Intelligent Autonomous Vehicles, IAV
2004, Lisbon.
ICINCO 2005 - ROBOTICS AND AUTOMATION
168
