
HARDWARE INDEPENDENT ARCHITECTURE FOR
AUTONOMOUS COLABORATIVE AGENTS
Guillermo Glez. de Rivera, Ricardo Ribalda, Kostadin Koroutchev, José Colás, Javier Garrido
Escuela Politécnica Superior. Universidad Autónoma de Madrid. C/ Francisco Tomás y Valiente 11, Madrid, Spain
Keywords: Mobile robot, XML/RPC,
WebService, Wireless.
Abstract: We describe a modular mobile robot test system. This architecture allows easy inclusion of user hardware
and communication modules. A client-server, XML/RPC based approach makes the system easy to program
and neutral in respect to the operating system and the programming language used. The hardware modules
are included using a hardware independent protocol. This feature of the system makes it very flexible and
easy to use and reconfigure. The architecture by itself has support for many different communication
modalities.
1 INTRODUCTION
Nowadays there is a great demand of robotic
systems designed to solve complex tasks in fields as
manufacture, construction, transport, medicine and
others (Sybley 2002). Furthermore, in web-
controlled systems, robots play the role of a physical
mediator, enabling remote operators to acquire
information, explore, manipulate, communicate, and
establish long-range interactions with other persons
(Wang, 2004), (Wang, 2003).
During the development process of a robotic
project, two
different teams are involved, namely
hardware and software group. The two teams
interact each other in order to solve the problem. In
many cases, the communication between the teams
is not possible and therefore, each group limits its
activities to the basic function only. For example, a
frequent practice for the software team is to limit its
efforts to simulated environment.
This paper presents a flexible and generic
platform
that serves to the hardware designers as a
full operative open system, where they can include
easily their own devices (see also Glez. De Rivera
2002). The only requirement imposed on the devices
is to comply with relatively simple communication
protocol.
The final result is, on one side, a mobile robot
equi
pped with sensors, actuators and different
communication interfaces, and on the other side,
software that controls the robot’s sensors-actuators.
The communication interfaces allow robot-robot and
robot-control centre collaboration.
The software design includes as much drivers as
necessa
ry to handle the sensors and the actuators.
Also, the necessary communication protocols are
defined, having in mind a variety of physical
communication media.
Multiple network interfaces are included, which
allow the age
nt to choose the optimal media in each
particular application. For the end user of the
platform, the system looks like a "black box" with
which he interacts through simple XML-RPC calls.
XML-RPC (XML-RPC, 2000), (Dissanaike
2
004) allows a software running in different
environments to make operating system independent
procedure calls over TCP/IP. This makes possible to
use different hardware elements, as for example
sensors and actuators to be used from most
platform/programming languages. From the
programmer point of view, the whole robot is
converted into a simple set of RPC functions.
This paper describes the global architecture of
the platform and its bas
ic hardware structure.
Similar systems are described in (Golovinski, 2004),
(Hoopes, 2003) and (Navarro 2002). The system
described in this paper, using client-server paradigm,
XML/RPC and machine/language independent way
to introduce hardware/software modules in assumed
to be easier to program and reconfigure.
Using this architecture, a variety of peripheries,
as for exam
ple video camera, microphones, speakers
have been tested and are in test process.
459
Glez. de Rivera G., Ribalda R., Koroutchev K., Colás J. and Garrido J. (2005).
HARDWARE INDEPENDENT ARCHITECTURE FOR AUTONOMOUS COLABORATIVE AGENTS.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 459-462
DOI: 10.5220/0001185604590462
Copyright
c
SciTePress

2 ROBOT ARCHITECTURE
A scheme of the system is showed in Figure 1.
Basically, each robot acts as a server. A set of clients
can query and command the robots. The clients can
be installed in the robots itself. The communication
server-server or client-server, can be done using
Internet or another type of private network.
Figure 1: System architecture
If given client does not support some of the
conventional data physical transport media, the
platform allows to use a bridge.
The client can be any device that supports
TCP/IP, like PC, PDA, mobile telephone, embedded
system, etc.
Considering the robot as hardware architecture,
the robot is a mechanical structure with traction
system, set of sensors e.i. ultrasounds/infrared
proximity sensors, end-race switches, camcorder,
microphone, etc.. All components are controlled by
a microprocessor that also supports the external
communications.
It is important to point out the flexibility of the
hardware structure, derived from:
a) The simple way to add new devices. The designed
software platform allows changing or adding any
hardware element with USB connection.
b) The possibility of establishing a communication
with the robots by means of different physical
media. Due to the capacity of the robots to choose
the most suitable media for each situation and the
ability to use redundancy of the media, the reliability
of the communications is high.
c) The control and data acquisition is possible from
any devices that have Internet connection, suitable
client application and adequate permissions.
The system has a set of predefined control
primitives to facilitate to the user low level operation
as for example, to advance straight, left or right, to
take and send a video frame, and similar.
The aim of the platform is to offer to the final
user a hardware solution for implementing any
application or algorithm. The platform offers to the
user a real hardware system that he can manage as
call functions to an especial software library.
These functions are defined in any part of the
code and the arguments of then will be for example
the robot IP address, identifying the physical
communication media chosen, or any parameter to
select a determinate sensor system predefined in the
robot.
2.1 Physical structure
The chassis is formed with aluminium profiles
forming rigid enough structure that allow fixing of
all necessary elements.
The traction mechanism was chosen to be a
system of rubber wheels, two driving rubber wheels
and a third rubber "crazy" wheel.
Each driving wheel is connected to a powerful
step motor that allows fine control of the robot
position.
In order to obtain that fine control and to release
the main controller from this time-consuming task,
the motors are handled by dedicated microprocessor
(PMD 2002) and run their own specially designed
Linux driver. The access to this driver is made by
means of USB protocol.
2.2 Central control system
The central control system is based on the well-
known PC architecture. The motherboard is a VIA
EPIA M10000 (VIA 2000), based on the
microprocessor Via C3/EDEN and running under
Linux operating system.
The communications are implemented using large
number of network elements, such as Ethernet,
wireless, parallel and serial ports, USB, bluetooth,
GSM/GPRS and radio in the band of 433MHz or
868MHz. Wireless is designed as principal
connection mode, because is the one that better
adjusts most of the necessities. The other methods
have been included in order to improve and
generalize the system as well as to add
communication redundancy.
The internal connections of different elements,
such as sensors or actuators, use exclusively USB
ports, because this interface is supported by the most
of peripheral devices. USB devices are low cost and
they do not need any additional power source.
A block diagram of the control structure can be
observed in Figure 2.
ICINCO 2005 - ROBOTICS AND AUTOMATION
460
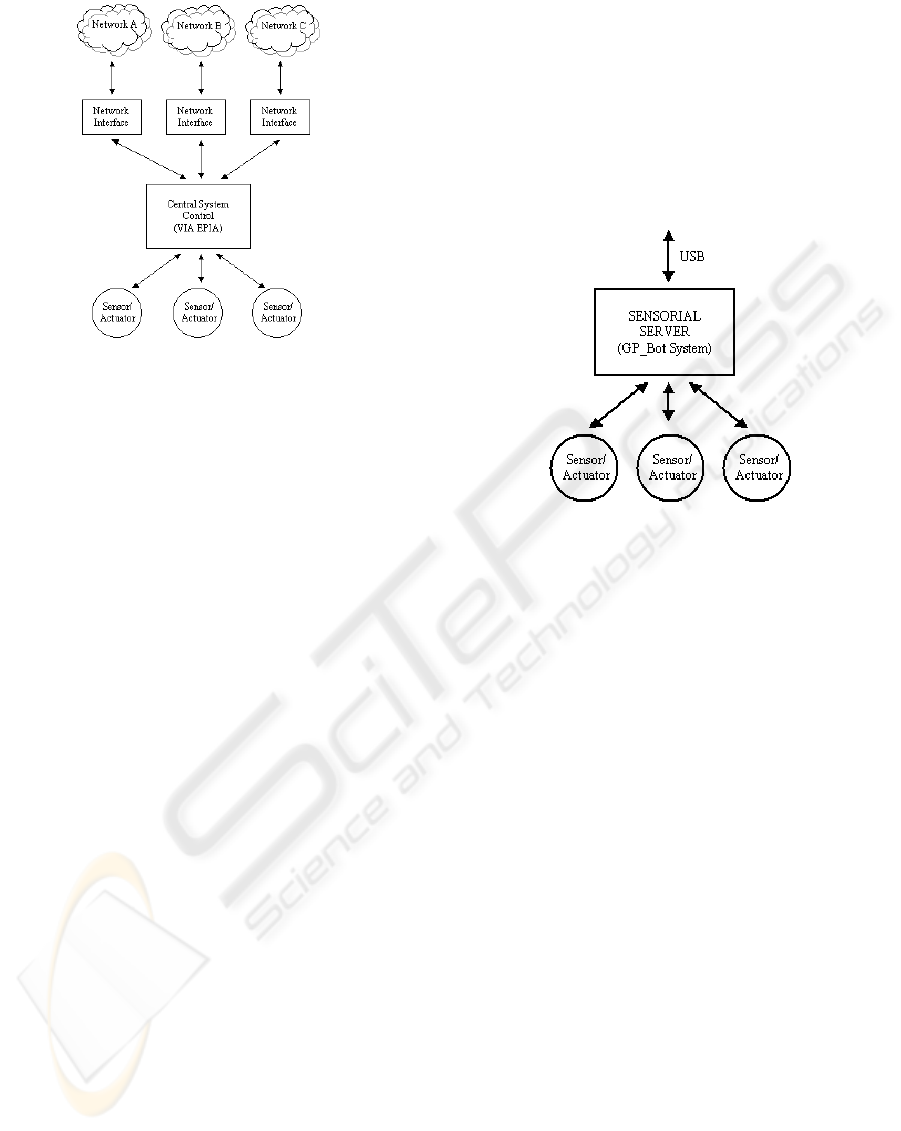
Figure 2: Block diagram of control structure
2.3 Robot state manager
This hardware element is mounted on the structure
of the robot and allows independent real-time
monitoring of the robot’s state, as for example the
current communication physical media, the state and
values of the connected sensors, the battery state,
power consumption of different modules, etc.
The state manager is implemented using the
GP_Bot Platform (Glez. de Rivera, 2002) connected
to the mainboard by serial port. Data are displayed
in a 128x64 graphic LCD screen (Ampire AG-
12864EYIQY-00). Screen menus are accessed by
means of a button set.
2.4 Sensorial server
A platform based just on PC is not flexible enough
for all propose as Input/Output processing. So we
developed a method to upgrade it introducing
external elements in a simple and standard way. The
external element, normally, will be composed by a
control element with sensors/actuators. In some
cases a specific sensor needs more attention of the
CPU. In these cases small autonomous control
systems, named sensorial servers (SS), are designed.
The SS are based on a microcontroller that attends
the sensor-effectors demands without occupying the
central unit (Figure 3).
In order to standardize the operation of the
sensorial servers, a communication protocol with the
central control has been defined.
In each one of these servers, an application that
attend demands of the central control is running. The
connection between the control central and the
server is made trough an USB port.
Most of the sensors/actuators are designed for
working using serial communications like RS232,
but in the other hand, a normal PC have just up to 4
serial ports. To solve this we propose that the RS232
communication goes over a USB communication
using USB UARTS. They support speeds up to 3M
bauds, what is enough for most applications. Also,
because they work through USB interface, up to 127
sensorial servers can be connected for each USB
port.
Figure 3: Block diagram of the sensorial server
In general, there are two ways to connect SS:
developing a protocol for each particular SS or
developing a standard SS protocol. If we choose the
former way, the hardware expert will have to
develop a driver and its interface. The later method
gives clear advantages in the development process
and makes the programs more simple and uniform.
We restrict the parameters of interface calls to
several primitive types, as integers and strings in
order to make the interface as simple as possible.
One of the reasons to do so is because at least some
of the functions of the interface have to be
implemented in hardware.
The communications with SS appear to the
central unit as a set of function calls. In each
functions a set of input and output arguments are
defined.
One important condition of these protocols is the
reflection activity; that means that the protocol have
to list all the defined functions supported by the SS.
With this capacity, when a new SS is connected to
the main control, this control or any client connected
to the robot trough the net, can know and use them.
In the basic robot architecture a set of predefined
SS, based on the previous mentioned GP_Bot
platform is included.
Due to the open design of the platform, any user
can include any kind of new sensor, directly o
trough a microprocessor based server with the only
condition of to be adapted to the previous declared
protocol.
HARDWARE INDEPENDENT ARCHITECTURE FOR AUTONOMOUS COLABORATIVE AGENTS
461

2.5 Speech synthesis and recognition
The robot’s architecture includes a set of
microphone and speaker, as speech system sensor
for two main reasons:
As a remote speech server, to record and transmit
sounds produced in the robot’s surroundings and to
reproduce speech messages received trough the net.
As an element for advanced research in the area
of human computer interfaces, to recognize human
speech orders, and to synthesize robot speech
answers.
3 CONCLUSIONS
As final result of this work a set of robots has been
designed. One of them is showed in the Fig. 4a &
4b, has the following characteristics:
a) Main control: mainboard VIA EPIA M10000
b) Sensorial servers: GP_Bot platform
c) Network interfaces: Wireless, Ethernet, USB
d) Two stepping motors (SST58D3820 model),
controlled by a motor processor (PDM).
e) Four Infrared sensor (Sharp GPD2D12).
f) Two Ultrasound sensor (SRF04).
We have developed new drivers for other types of
sensors as pyrometers, wet sensors or gas sensors.
Figure 4a: Image of the robot
Figure 4b: Image of the robot without top
REFERENCES
Dissanaike S.; P. Wijkman and M. Wijkman, 2004.
Utilizing XML-RPC or SOAP on an embedded system,
Proc. 24th International Conference on Distributed
Computing Systems Workshops, pp438–440.
Glez. de Rivera G. et al.. 2002. GP_BOT: Plataforma
Hardware para la enseñanza de Robótica en Ing.
Informática. In (TAEE'02). pp67-70. UPGC.
Golovinski A., Yim M., Zhang Y., Eldershaw C., Duff D.,
2004. PolyBot and PolyKinetic System: A modulR
Robotic Platform for education, International
Conference on Robotic & Automation.
Hoopes D., Davis T., Norman K., Helps R., 2003, An
Autonomous Mobile Robot development platform for
teaching a graduate level mechatronics course. 33
rd
ASEE/IEEE Frontiers in Education Conference.
Navarro L., et al., 2002. Millibots. The development of a
framework and algorithms for a distributed
heterogeneous robot team. In IEEE Robotic and
Automation Magazine, vol 2, no 4, pp 31-40.
PDM-MC3410 Pilot Motion Processor
Sibley G.T., Rahimi M.H., Sukhatme G.S., 2002.
Robomote : a tiny mobile robot platform for large-
scale ad-hocsensor networks. IEEE, Robotics and
Automation. ICRA’02, pp 1143-1148.
VIA Technologies Inc,
http://www.viavpsd.com/product/
Wang D.; X. Ma and X. Dai, 2004. Web-based robotic
control system with flexible framework. Proc. ICRA
'04. IEEE International Conference on Robotics and
Automation, Volume: 4, pp:3351-3356.
Wang X.; M. Moallem and R.V. Patel. 2003. An Internet-
based distributed multiple-telerobot system. IEEE
Transactions on Systems, Man and Cybernetics, Part
A, Vol:33, Issue: 5, Sept. 2003, pp:627 – 634.
XML-RPC
http://www.xmlrpc.com/
ICINCO 2005 - ROBOTICS AND AUTOMATION
462
