
ROBOT LEARNING BY DEMONSTRATION USING FORWARD
MODELS OF SCHEMA-BASED BEHAVIORS
Adam Olenderski, Monica Nicolescu, Sushil Louis
Dept. of Computer Science and Engineering
University of Nevada
Reno, NV, 89557
Keywords:
Learning by demonstration, human-robot interaction, mobile robots.
Abstract:
A significant challenge in designing robot systems that learn from a teacher’s demonstration is the ability to
map the perceived behavior of the trainer to an existing set of primitive behaviors. A main difficulty is that
the observed actions may constitute a combination of individual behaviors’ outcomes, which would require
a decomposition of the observation onto multiple primitive behaviors. This paper presents an approach to
robot learning by demonstration that uses a potential-field behavioral representation to learn tasks composed
by superposition of behaviors. The method allows a robot to infer essential aspects of the demonstrated tasks,
which could not be captured if combinations of behaviors would not have been considered. We validate our
approach in a simulated environment with a Pioneer 3DX mobile robot.
1 INTRODUCTION
Learning from demonstration is a natural method for
augmenting a robot’s skill repertoire. The main diffi-
culty of this approach is the interpretation of observa-
tions gathered from the instruction, as the robot has to
process the data coming from its sensors, then trans-
late it into appropriate skills or tasks. If the robot al-
ready has a basic set of capabilities, interpreting the
demonstration becomes a problem of creating a map-
ping between the perceived action of the teacher to a
set of existing primitives (Schaal, 1999).
The behavior-based approach is particularly well
suited for autonomous robot control due to its mod-
ularity and real-time response properties. While
behavior-based control emphasizes the concurrent
use of behaviors, existing learning by demonstration
strategies have mostly focused on learning unique
mappings from observations to a single robot behav-
ior. This approach relies on the assumption that there
exists a unique corresponding behavior underlying
any one of the demonstrator’s actions. However, this
is a strong assumption which does not hold in a signif-
icant number of situations. Biological evidence, such
as the schema theory (Arbib, 1992), suggests that mo-
tor behavior is typically expressed in terms of con-
current control of multiple different activities. This
view is also similar to the concept of basis behaviors
(Matari
´
c, 1997), in which a complete set of underly-
ing primitives is capable of generating the entire mo-
tor repertoire of a robot.
Based on these considerations, it becomes of sig-
nificant interest to address the problem of learning a
decomposition of a demonstrator’s actions onto possi-
bly multiple primitives from a robot’s repertoire. Our
hypothesis is that such a strategy will enable robots
to learn aspects of the task that could not otherwise
be captured by a sequential learning approach. In this
paper, we assume that the robot is equipped with a set
of basic capabilities, which will constitute the foun-
dation for learning. The learning method we propose
relies on a schema-based representation of behaviors
(Arkin, 1987), which provides a uniform output in
the form of vectors generated using a potential fields
approach. This representation allows for cooperative
behavior coordination, i.e., fusion of commands from
multiple behaviors, which in our case is performed
through vector addition.
In this paper we present a method that uses for-
ward models to learn tasks which constitute combi-
nations of multiple (in our case two) concurrent prim-
itive behaviors. While, in general, more than two be-
haviors can contribute to the overall task, the results
we present in this paper demonstrate that significant
aspects of the task can be learned even with only two
concurrent behaviors. The results we present demon-
263
Olenderski A., Nicolescu M. and Louis S. (2005).
ROBOT LEARNING BY DEMONSTRATION USING FORWARD MODELS OF SCHEMA-BASED BEHAVIORS.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 263-269
DOI: 10.5220/0001186202630269
Copyright
c
SciTePress

strate the potential of learning approaches for coop-
erative behavior coordination and provide a strong
support for future exploration of these methodolo-
gies. The learning algorithm we present in this pa-
per is based on the idea of finding the contribution,
expressed as a weight, of each of the primitive behav-
iors to the demonstrated task. These weights incorpo-
rate essential information and can capture subtle dif-
ferences between tasks, which, even if achieving the
same goals, can lead to very different ways of task
execution.
The reminder of the paper is structured as follows:
Section 2 describes previous approaches to robot task
learning and the use of forward models for mapping
observed actions onto a robot’s skill repertoire. Sec-
tion 3 presents our schema-based behavior represen-
tation and Section 4 describes our learning approach.
We present our experimental results in Section 5 and
conclude with a discussion (Section 6) and a summary
of the proposed approach (Section 7).
2 RELATED WORK
The work we present in this paper falls in the category
of learning by experienced demonstrations. This im-
plies that the robot actively participates in the demon-
stration provided by the teacher, and experiences the
task through its own sensors. This is an essential
characteristic of our approach, and is what provides
the robot the data necessary for learning. The advan-
tage of using such techniques is that the robot is freed
from interpreting and relating the actions of a differ-
ent body to its own. The acquired sensory information
is in terms of the robot’s own structure and sensory-
motor skills.
In the mobile robot domain, successful approaches
that rely on this methodology have demonstrated
learning of reactive policies (Hayes and Demiris,
1994), trajectories (Gaussier et al., 1998), or high-
level representations of sequential tasks (Nicolescu
and Matari
´
c, 2003). These approaches employ a
teacher following strategy, in which the robot learner
follows a human or a robot teacher. Our work is sim-
ilar to that of (Aleotti et al., 2004), who perform the
demonstration in a simulated, virtual environment.
A significant challenge of all robotic systems that
learn from a teacher’s demonstration is the ability
to map the perceived behavior of the trainer to their
own behavior repertoire. A successful approach that
has been previously employed for matching observa-
tions to robot behaviors is based on forward models
(Schaal, 1997; Wolpert et al., 1998), in which mul-
tiple behavior models compete for prediction on the
teacher’s behavior (Wolpert and Kawato, 1998; Hayes
and Demiris, 1994). The behavior with the most accu-
rate prediction is the one said to match the observed
action. In this paper we present a method that uses
predictive models of the robot’s behaviors to learn
tasks which consist of combinations of concurrently
running behaviors.
3 BEHAVIOR REPRESENTATION
Behavior-Based Control (BBC) (Matari
´
c, 1997;
Arkin, 1998) has become one of the most popular ap-
proaches to embedded system control both in research
and in practical applications.
In this paper we use a schema-based representa-
tion of behaviors, similar to that described in (Arkin,
1987). This choice is essential for the purpose of our
work, since it provides a continuous encoding of be-
havioral responses and a uniform output in the form
of vectors generated using a potential fields approach.
In our system, a controller consists of a set of
concurrently running behaviors. Thus, for a given
task, each behavior brings its own contribution to
the overall motor command. These contributions are
weighted such that, for example, an obstacle avoid-
ance behavior could have a higher impact than reach-
ing a target, if the obstacles in the field are signifi-
cantly dangerous to the robot. Alternatively, in a time
constrained task, the robot could give a higher contri-
bution to getting to the destination than to obstacles
along the way. These weights affect the magnitude
of the individual vectors coming from each behavior,
thus generating different modalities of execution for
the task.
4 LEARNING APPROACH
The main idea of the learning algorithm we propose is
to infer, from a teacher provided demonstration, what
is the contribution (expressed as a weight) of each of
the robot’s behaviors to the presented task. As men-
tioned earlier, these weights modulate the magnitude
of vectors coming from the individual robot behav-
iors, thus influencing the resulting (fused) command
and consequently the way the robot interacts with the
world. However, choosing these weights is not a triv-
ial problem. Numerous experiments might be needed
to determine a set of weights that allow the robot to
go through tight corridors and will keep it from col-
liding with obstacles as well. Therefore, in order to
save time and other resources (such as robot power),
it becomes of significant interest to derive the appro-
priate weights for the behaviors by demonstrating the
desired navigation style to the robot.
For pairs of behaviors, this is accomplished through
a learning algorithm that is based on the geometric
ICINCO 2005 - ROBOTICS AND AUTOMATION
264

properties of vectors. During the demonstration, a
human uses a joystick to guide the robot through the
task while the robot’s behaviors continuously provide
predictions on what their outputs would be (in the
form of a vector) for the current sensory readings.
However, instead of being translated into motor com-
mands, these predictions are recorded along with the
turning rate of the robot at that moment of time. Thus,
for each time step we are provided with a pair of vec-
tors v
1
and v
2
of known directions and magnitudes
(from the two behaviors) and a vector representing the
combination of the two vectors v, of known orienta-
tion, but whose magnitude is unknown (from the user
commands). However, it is known that the resulting
vector represents the combination of the two vectors
v
1
and v
2
, modified by some unknown weights w
1
and w
2
(Figure 1). The goal of the algorithm is to
infer what are these weights, more precisely to learn
the ratio w = w
2
/w
1
between the two. Intuitively,
we are interested in computing the relative weight be-
tween the contribution of the two behaviors, which
could produce the vector v, whose orientation is pro-
vided by the teacher’s demonstration.
Figure 1: Visual representation of vectors v
1
, v
2
, (a) rays r
and r
2
and (b) vectors v and v
′
2
.
The learning algorithm analyzes each of the records
as follows: of the two vectors v
1
and v
2
being an-
alyzed, one vector’s weight will be kept constant at
1 (say v
1
) while the other (say v
2
) will be assigned
a weight relative to the first. For every record, the
turn rate of the robot is interpreted as the angle of a
ray r, which is the support of the resulting vector v,
obtained from the teacher’s demonstration. The ori-
gin of another ray r
2
whose orientation is the same
as that of v
2
is placed at the terminal endpoint of v
1
(Figure 1(a)). The intersection point of rays r and r
2
can be interpreted as the endpoint of two vectors v
′
2
and v, where the initial endpoint and angle of v
′
2
are
the same as those of r
2
, and the initial endpoint and
angle of v are the same as those of r (Figure 1(b)). By
the properties of vector addition, v = v
1
+ v
′
2
. Since v
is the vector corresponding to the command transmit-
ted to the robot’s motors via the operator’s joystick,
v
1
is the unaltered vector generated by one of the be-
haviors, and the angle of v
′
2
is the same as that of the
other behavior’s vector v
2
, we can interpret v
′
2
as the
product of the vector v
2
and the desired weight, which
can be easily determined by dividing the magnitude of
v
′
2
by the magnitude of v
2
. That is, w
2
= ||v
′
2
||/||v
2
||,
w
1
= 1, and the ratio between the two is the resulting
w.
The process described above is performed on each
of the recorded steps in turn, resulting in a weight
ratio for every time step during the demonstration.
While the computed ratios will vary throughout the
task, a single ratio will emerge as being the most con-
sistent with the entire task. We find this by remov-
ing obvious outliers (ratios that are in the thousands
to hundreds of thousands range, generated when the
difference between the turn rate and one of the com-
ponent vectors is very close to zero, implying that for
that timestep, one vector is infinitely stronger than the
other), and taking the average of the derived weights
over all the records.
5 EXPERIMENTAL RESULTS
To validate the proposed learning algorithm we per-
formed experiments using the Player/Stage simula-
tion environment (Gerkey et al., 2003) and a Pioneer
3DX mobile robot equipped with a SICK LMS-200
laser rangefinder, two rings of sonars, and a pan-tilt-
zoom (PTZ) camera.
5.1 Robot Behaviors
The robot is equipped with the following primitive be-
haviors: laser obstacle avoidance (avoid), attraction to
a goal object (attract), attraction to unoccupied space
(wander), sonar obstacle avoidance (sonarAvoid), dis-
tinct from the avoid behavior due to differences in
sensor specifications, and random direction change
(random), all implemented using a potential fields ap-
proach.
For the experiments described in this paper we
only used the avoid, attract and wander primitives.
All of these behaviors use information from the laser
rangefinder, which returns the distance between the
robot and any object the laser encounters, for each
unit of angular resolution. We have determined that
the maximum range at which obstacles should have
an effect on the robot’s behavior is 2 meters. If there
are no obstacles within this range, the value of 2 me-
ters is returned. Goal objects are represented as fidu-
cials, which can be detected using combined infor-
mation from the laser and PTZ camera. The laser’s
fiducial detector has a range of 8 meters.
ROBOT LEARNING BY DEMONSTRATION USING FORWARD MODELS OF SCHEMA-BASED BEHAVIORS
265
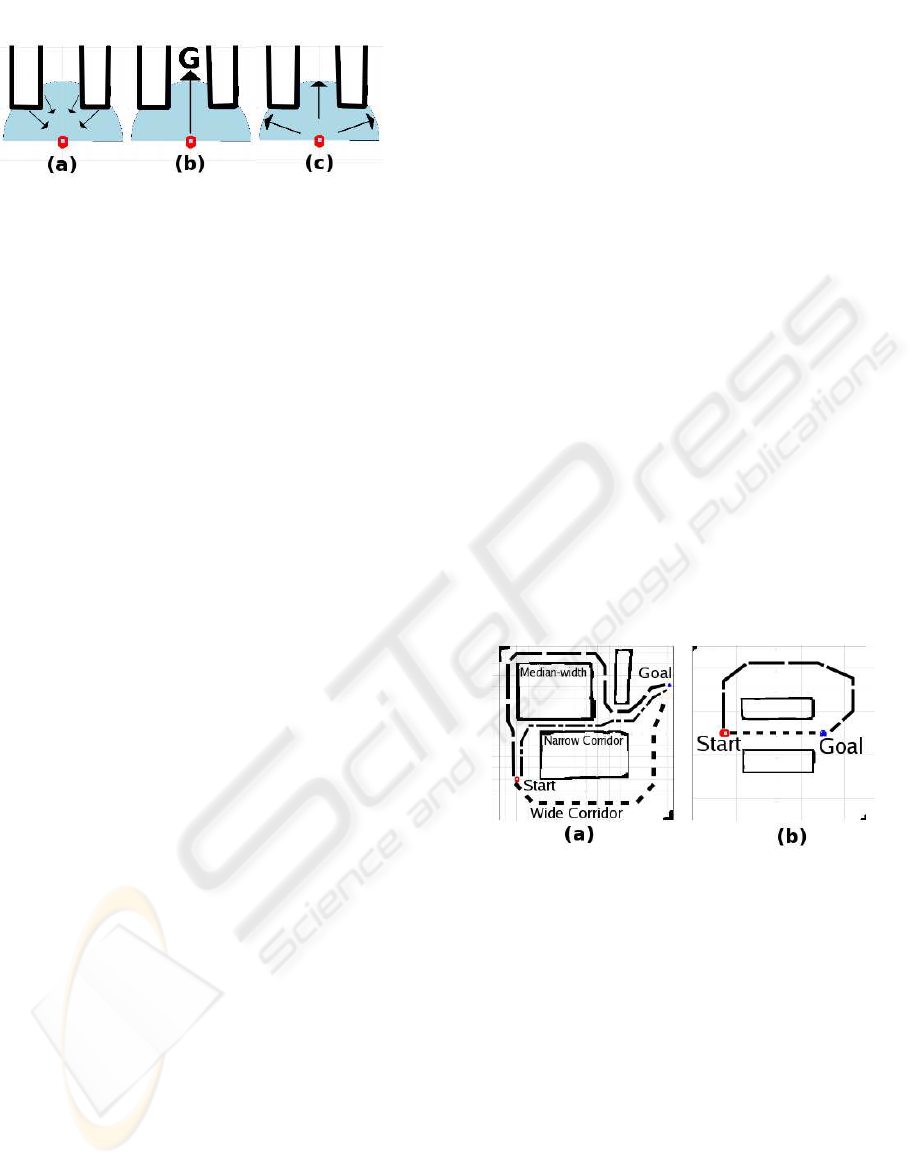
Figure 2: Potential field encoding of the following behav-
iors: (a) obstacle avoidance, (b) goal attract and (c) wander
Below we describe the implementation details of
the three behaviors that we used:
• Avoid. The avoid behavior is activated whenever
the laser rangefinder returns a value within a distance
smaller than 2 meters. In this situation, for each laser
reading that reaches an obstacle, the behavior gener-
ates a vector whose angle is the bearing to the obstacle
plus 180 degrees and whose magnitude is equal to a
function of the distance between the robot and the ob-
stacle. We add 180 degrees to the angle to reverse the
direction of the vector, such that the robot is repulsed
by the obstacle. The function used to determine the
magnitude is 2/d − 1 if d is less than or equal to 2
and 0 if d is greater than 2, where d is the distance
to the obstacle and 2 is the maximum range (in me-
ters) at which obstacles can affect the robot’s behav-
ior. The resulting vectors are then combined through
vector addition to form one vector representing the re-
sponse of the avoid behavior.
• Wander. The wander behavior is activated when-
ever there are unoccupied spaces in the 180-degree
front field of view of the robot. For each laser reading
that does not reach an obstacle, a vector is generated
whose angle is the bearing of that empty space and
whose magnitude is 1. These vectors are then com-
bined through vector addition to form one vector rep-
resenting the response of the wander behavior.
• Attract. The attract behavior is activated when-
ever a goal object (fiducial) is in the robot’s field of
view. For each goal object that is detected, a vector
is generated whose angle is the bearing to the object
and whose magnitude is 1.
Within a particular controller, after these vectors
are generated, each one is multiplied by a scalar that
represents its relative importance compared to the
other behavior(s) and then they are combined through
vector addition. The resulting vector is then inter-
preted as a movement command and sent to the mo-
tors. This is done by translating the angle of the re-
sulting vector into rotational velocity. If the angle is
within the front 90 degrees of the robot, the robot will
move forward while turning. If the angle is within ei-
ther the left or right 90 degrees of the robot, the robot
will stop forward movement and turn in place until
the resulting vector is once again pointing in front of
the robot. If the angle of the resulting vector is within
the rear 90 degrees of the robot, the robot will reverse
while turning in the direction indicated.
The experiments we describe below validate the
learning algorithm’s ability to derive the weights of
these behaviors for various user-provided demonstra-
tions: different task achieving strategies are repre-
sented by different weights, which will be captured
by our proposed approach.
5.2 Experimental Setup
We tested the learning algorithm described above in
two scenarios, each of which used a different be-
havior pair: one with avoid/wander and one with
avoid/attract. For each scenario we performed two
sets of experiments, comprising the teaching by
demonstration and the validation stages respectively.
Each set was undertaken in a different “world,” de-
fined by a map and the starting positions of both the
robot and a goal object (Figure 3). In the first sce-
nario, the robot has to learn the task of navigating
safely in an environment with various sized corridors.
In the second scenario, the robot has to learn how
to reach a particular target, in an environment with
tighter or larger open spaces.
Figure 3: Experimental setup with possible paths: (a)
Avoid/wander experiment, (b) Avoid/Attract experiment
In the demonstration step of both sets of experi-
ments, a human operator uses a joystick to drive the
robot to the goal object while a background process
keeps track of the predictions of the component vec-
tors, the robot’s speed, and the robot’s turn rate at each
timestep, as described in Section 4. The user chooses
one of several paths to the goal, each of which rep-
resents a different strategy of performing the same
task. The different chosen paths have different effects
on the component behaviors, more specifically on the
weight that is placed on each behavior in turn. For ex-
ample, in the experiment where avoid and wander are
the two behaviors available, there are three different
paths to the goal, each slightly narrower than the last.
Ideally, if the user takes the path of medium width,
ICINCO 2005 - ROBOTICS AND AUTOMATION
266
then the robot should learn a set of behavior weights
that allows it to traverse paths of that width and larger,
while preventing it from entering narrower corridors.
Likewise, for the setup in which avoid and attract are
the behaviors the robot has available, there are two
possible paths to the goal: one which goes through
a narrow corridor and one which bypasses the corri-
dor altogether. In this case, it is hoped that if the user
drives the robot along the former path, the learning
algorithm will derive a weight for the attract vector
strong enough to compel the robot to traverse the cor-
ridor. Conversely, if the user bypasses the corridor, it
is hoped that the algorithm will derive a weight for the
attract vector that is too weak to overcome the contri-
bution from the avoid vector when faced with such a
tight space. The demonstration stops in both sets of
experiments when the user reaches the goal object.
The learning algorithm then analyzes the infor-
mation recorded in each of the demonstration runs.
For each timestep recorded, the algorithm derives a
weight based on the component vectors, the turn rate
and the speed of the robot for that timestep. The al-
gorithm produces a set of behavior weights, as de-
scribed in Section 4. While in our current implemen-
tation the learning is performed off-line, at the end of
the demonstration, the processing could also be per-
formed on-line, after each executed step.
To evaluate the performance of the learning algo-
rithm we place the robot at various locations in the en-
vironment and equip it with an autonomous controller
which uses the derived weights. If the robot performs
the same strategy as demonstrated by the user (e.g.,
does not navigate corridors or tight spaces narrower
than those through which the user drove it, but tra-
verses any wider spaces), the experiment is consid-
ered a success.
5.3 Results
To test the learning algorithm on the first scenario
that involves the avoid/wander behavior pair, we per-
formed three separate experiments, one for each path
indicated in Figure 3 (a). Furthermore, each of these
experiments was repeated three times, resulting in the
nine values in the first scenario portion of Table 1.
First, the user navigated the robot through the nar-
rowest path towards the goal. The result was a rel-
atively large weight for the wander behavior, as com-
pared with weights derived for wander in the next two
demonstrations (see Table 1). We then activated the
robot’s controller using the learned weights in three
different runs, starting from various initial positions:
one inside the narrow corridor, one inside the median-
width corridor, and one inside the wide corridor. The
controller allowed the robot to easily traverse the nar-
row corridor, as well as wider areas, since the weight
of wander was able to overcome the response of the
avoid behavior.
In a second demonstration, the user guided the ro-
bot through the middle-width path, which resulted in
a significantly smaller weight for the wander behav-
ior (see Table 1). We tested the resulting controller
in three different runs, starting the robot in each of
the thee corridors (narrow, median-width and large).
When placing the robot on the narrowest path we
found that the weight of the wander behavior is no
longer strong enough to counter the effect of obstacle
avoidance, forcing the robot to reverse in an attempt to
escape from the constricting space. However, the ro-
bot was easily able to traverse the median-width cor-
ridor, as well as the largest one.
Finally, the user took the widest path for the third
demonstration, which resulted in a significantly lower
weight for the wander behavior than in the previous
two runs (see Table 1). In the three experiments we
performed with the learned controller, the robot was
not able to traverse the narrow and median-width cor-
ridors, even when placed there, but was able to tra-
verse the widest corridor with ease.
Two subsequent repetitions of these experiments
(both learning and validation) led to similar re-
sults (with slight differences due to variability in
the user’s demonstration), leading to the conclusion
that the learning algorithm correctly derives the rela-
tive importance of the two component vectors in the
avoid/wander scenario and that it accurately captured
the strategy of the demonstrator.
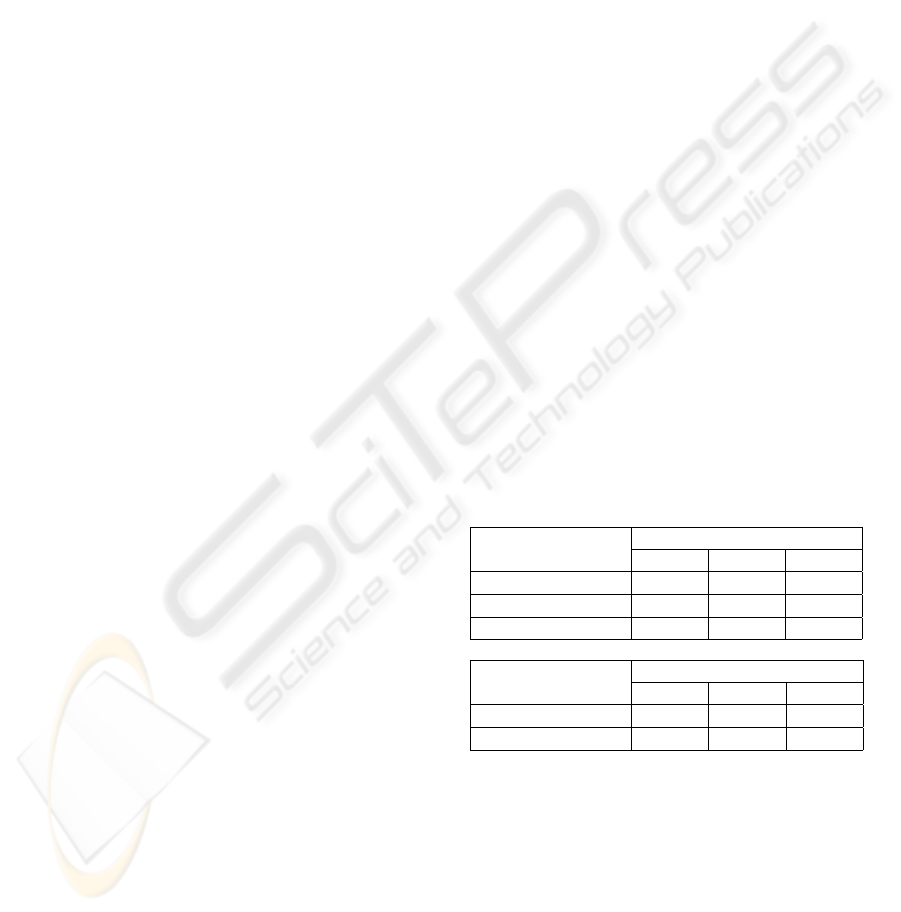
Table 1: Behavior weights learned through demonstration
(Avoid weights kept constant at 1)
Wander vs. Avoid weight
First scenario
Exp. 1 Exp. 2 Exp. 3
Narrow corridor 7.8 14.4 8.4
Medium corridor 3.8 3.2 3.3
Wide corridor 0.4 0.6 0.4
Attract vs. Avoid weight
Second scenario
Exp. 1 Exp. 2 Exp. 3
Traverse corridor 195.5 215.2 195.6
Avoid corridor 124.0 131.9 118.7
The experiments for the second scenario, for which
the avoid/attract behavior pair was available to the
robot, followed similar lines and achieved similar re-
sults. In a first demonstration, the user drove the robot
through the narrow corridor and directly to the goal.
This resulted in a weight for the attract behavior that
allowed the robot, in the first validation run, to tra-
verse the corridor, even in the presence of obstacle
avoidance. In the second validation run, the robot was
again able to reach the goal when placed at an initial
position where it could see the goal, but was not sep-
arated from it by the narrow corridor.
ROBOT LEARNING BY DEMONSTRATION USING FORWARD MODELS OF SCHEMA-BASED BEHAVIORS
267

In the second demonstration, the user turns the ro-
bot away upon approaching the entrance to the nar-
row corridor, opting instead to lead the robot around
the obstacles from which it was constructed. As ex-
pected, this resulted in a much lower weight for the
attract behavior, which, when used in the robot’s con-
troller, caused the robot to stop at the entrance of
the corridor, where the magnitude of the avoid vector
generated by the obstacle walls became equal to that
of the attract vector generated by the goal at its other
end. When placed initially at a location where it could
see the goal without having to go through a corridor,
the robot was easily able to approach the goal object.
As with the avoid/wander behavior pair scenario, two
subsequent experiments demonstrated the repeatabil-
ity of these results, further confirming our learning
algorithm’s viability in deriving relative weights of
pairs of behaviors using the potential fields method.
The trained controller is not restricted to a a par-
ticular path or execution sequence and is therefore
general enough to exhibit meaningful behavior in any
evaluation environment. For example, if a robot is
trained in corridors of 1 meter in width, the robot
will not enter any corridor that is narrower than 1
meter, regardless of the world in which it is placed
and without storing any explicit information about the
width of the corridor. The relative weights of the wan-
der and avoid behaviors will determine if the attrac-
tive force pulling the robot towards some corridor is
strong enough to overcome the repulsive force gener-
ated by the avoid behavior.
6 DISCUSSION
The approach we presented demonstrates the impor-
tance of considering concurrently running behaviors
as underlying mechanisms for achieving a task. The
method we proposed allows for learning of both the
goals involved in the task (e.g., reaching a target) and
also of the particular ways in which the same goals
can be achieved. The teacher’s demonstration pro-
vides essential information about the task, such as
what is more important: reaching the goal or stay-
ing away from obstacles. A purely sequential learn-
ing method would have identified the ultimate goal of
the task, but would have failed to capture the different
modalities in which the task could be achieved.
The proposed approach could also make a signifi-
cant impact on modeling human behavior. Since the
algorithm allows for learning the level of importance
of various aspects of the task, it would enable under-
standing of the priorities different users have when
performing that task, thus capturing the underlying
strategies they employ. For example, the algorithm
could distinguish between bold strategies, in which
the user rushes through obstacles and toward the goal,
and cautious strategies in which the user goes slowly
around obstacles.
7 SUMMARY
We presented a method for robot task learning from
demonstration that addresses the problem of mapping
observations to robot behaviors from a novel perspec-
tive. Our claim, supported by biological inspiration,
is that motor behavior is typically expressed in
terms of concurrent control of multiple different
activities. Toward this end, we developed a learning
by demonstration approach that allows a robot to map
the demonstrator’s actions onto multiple behavior
primitives from its repertoire. This method has been
shown to capture not only the overall goals of the
task, but also the specifics of the user’s demonstration
which indicate different ways of executing the same
task.
ACKNOWLEDGEMENTS
This work has been supported by the Office of Naval
Research under contract number N00014-03-1-0104
and by a UNR Junior Faculty Award to Monica Nico-
lescu.
REFERENCES
Aleotti, J., Caselli, S., and Reggiani, M. (2004). Leverag-
ing on a virtual environment for robot programming
by demonstration. Robotics and Autonomous Systems,
47:153–161.
Arbib, M. (1992). Schema theory. In S.Shapiro, editor, The
Encyclopedia of Artificial Intelligence, pages 1427–
1443. Wiley-Interscience.
Arkin, R. C. (1987). Motor schema based navigation for a
mobile robot: An approach to programming by behav-
ior. In IEEE Conference on Robotics and Automation,
1987, pages 264–271.
Arkin, R. C. (1998). Behavior-Based Robotics. MIT Press,
CA.
Gaussier, P., Moga, S., Banquet, J., and Quoy, M. (1998).
From perception-action loops to imitation processes:
A bottom-up approach of learning by imitation. Ap-
plied Artificial Intelligence Journal, 12(78):701–729.
Gerkey, B., Vaughan, R. T., and Howard., A. (2003). The
player/stage project: Tools for multi-robot and distrib-
uted sensor systems. In Proc., the 11th International
Conference on Advanced Robotics, pages 317–323.
ICINCO 2005 - ROBOTICS AND AUTOMATION
268

Hayes, G. and Demiris, J. (1994). A robot controller using
learning by imitation. In Proc. of the Intl. Symp. on In-
telligent Robotic Systems, pages 198–204, Grenoble,
France.
Matari
´
c, M. J. (1997). Behavior-based control: Examples
from navigation, learning, and group behavior. Jour-
nal of Experimental and Theoretical Artificial Intelli-
gence, 9(2–3):323–336.
Nicolescu, M. N. and Matari
´
c, M. J. (2003). Natural meth-
ods for robot task learning: Instructive demonstration,
generalization and practice. In Proc., Second Intl.
Joint Conf. on Autonomous Agents and Multi-Agent
Systems, Melbourne, Australia.
Schaal, S. (1997). Learning from demonstration. Advances
in Neural Information Processing Systems, 9:1040–
1046.
Schaal, S. (1999). Is imitation learning the route to
humanoid robots? Trends in Cognitive Sciences,
6(3):323–242.
Wolpert, D. and Kawato, M. (1998). Multiple paired for-
ward and inverse models for motor control. Neural
Networks, 11:1317–1329.
Wolpert, D., Miall, R., and Kawato, M. (1998). Internal
models in the cerebellum. Trends in Cognitive Sci-
ence, 2:338–347.
ROBOT LEARNING BY DEMONSTRATION USING FORWARD MODELS OF SCHEMA-BASED BEHAVIORS
269
