
A FUZZY CONTROLLER FOR A SPECIAL GLOVE TO A HAND
WITH DISABILITIES
Viorel Stoian, Mircea Ivanescu, Elena Stoian
Automation, Computers and Electronics Department, University of Craiova
Decebal Street, No. 107, 200440, Craiova, Romania,
Ionela Iancu
Physiology and Medical Informatics Department, University of Medicine and Pharmacy of Craiova, Romania
Keywords: Hand prosthesis, Hyper-redundant structure, Distributed control, Dynamic model, Fuzzy controller.
Abstract: This paper presents a control method for a medical glove with intelligent actuators for a hand with
disabilities. The medical glove has got on outer superior face, an intelligent actuator to every finger, which
helps it to bend and to grasp different objects and on outer inferior face a force distributed sensor system.
The dynamic model of the outer superior face finger is determined and an approximate model is proposed.
The two-level hierarchical control is adopted. The upper level coordinator gathers all the necessary
information to resolve the distribution force. Then, the lower-level local control problem is treated as an
open-chain hyper-redundant structure control problem. The fuzzy rules are established and a fuzzy
controller is proposed.
1 PHYSIOLOGICAL ASPECTS
OF HAND FUNCTIONS
The hand functions as an effector organ of the upper
extremity for: support, manipulation, prehension. As
a support, the hand acts in a non-specific manner to
brace or stabilise an object and, also, as a simple
platform to transfer or accept forces.
The most varied function of the hand is its ability
to dynamically manipulate objects. Fingers motions
may be repetitive and blunt (typing or scratching) or
continuous and fluid with the rate and intensity of
motion continuous controlled (writing or sewing).
Prehension describes the ability of the fingers to
grasp for holding, securing and picking up objects.
There are many form of prehension: the grip, in
which all fingers are used, the pinch, in which
primarily the thumb and index fingers are used, the
power grip, the precision grip, the power pinch, the
precision pinch, hook grip and others.
For hand prosthesis the prehension is the first
goal. In this paper we propose a special glove (a
hand prosthesis) that realises a great help for the
fingers flexion on their grip tasks to a hand with
disabilities (the fingers have a great stiffness in their
actions) while the other hand is a good hand. We
need to know the proper correspondence between
fingers actions and the activation of the nerves of the
hand upper extremity. The nerves responsible for the
hand motor control are: the radial nerve, the median
nerve, the ulnar nerve (Neumann, 2002), (Zaharia,
1994). The radial nerve innervates the extrinsic
extensor muscles of the fingers and is responsible
for the sensation on the dorsal part of the wrist and
hand. The median nerve innervates most of the
extrinsic flexor muscles of the fingers and is
responsible for the sensation on the palmar-lateral
part of the hand and the lateral three and one-half
fingers. The ulnar nerve innervates the medial half
of the flexor digitorum profundus muscle and is
responsible for the sensation on the ulnar border of
the hand and the ulnar one and one-half fingers. So,
we propose the connection of the special glove with
the median nerve and the ulnar nerve, because they
realise the flexion motion of the hand in prehension.
This is necessary, also, for maintaining the
indispensable cortical representation of the motor
and sensitive hand images.
270
Stoian V., Ivanescu M., Stoian E. and Iancu I. (2005).
A FUZZY CONTROLLER FOR A SPECIAL GLOVE TO A HAND WITH DISABILITIES.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 270-276
DOI: 10.5220/0001186402700276
Copyright
c
SciTePress
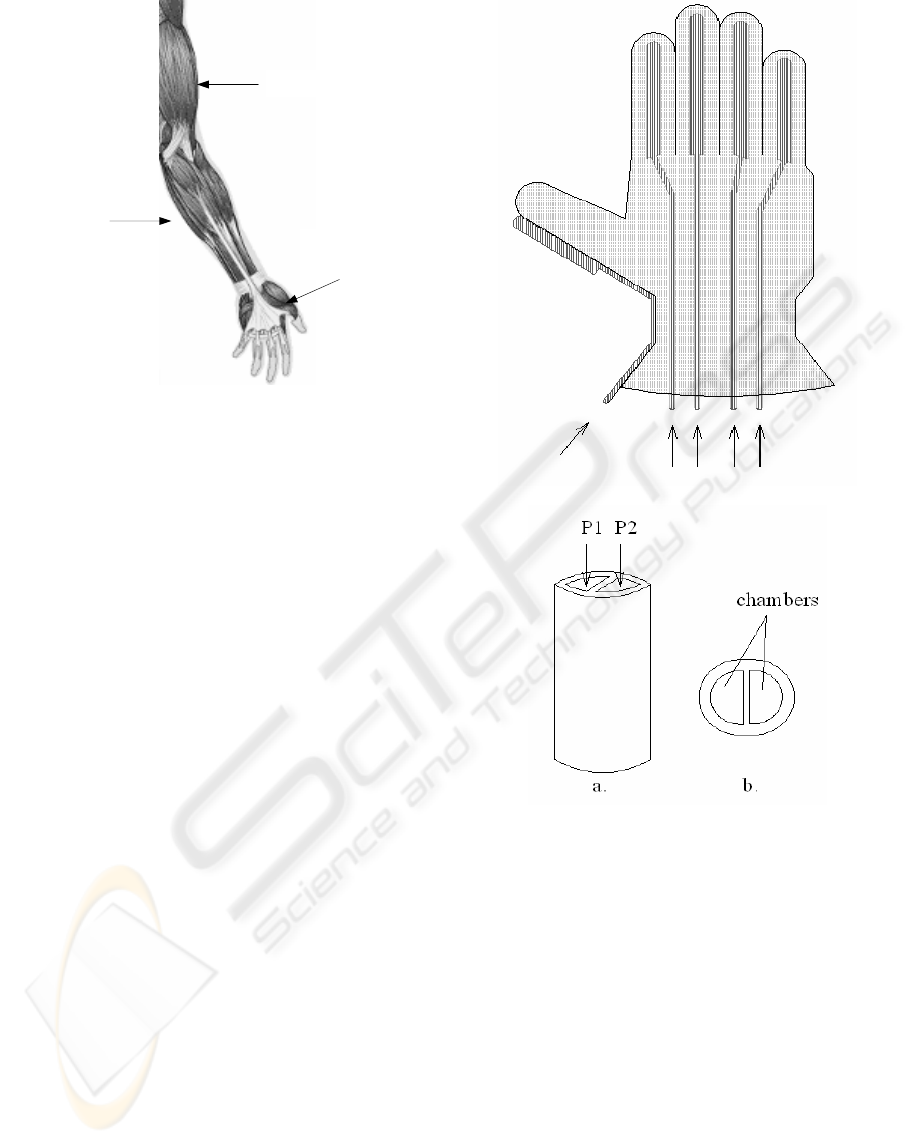
Figure 1: The muscular structure of the hand
2 PHYSICAL STRUCTURE
In Figure 2 is presented the physical structure of the
special glove. On the superior faces of the glove
fingers are fixed 5 tubes with have their structure
presented in Figure 3 (hydraulic or pneumatic
actuators) and on the inferior faces (at end of the
glove fingers) are fixed strain-gaugeds for force
measurement. The chambers of the segment have
reinforced rubber walls with fibers on a circular
direction. Thus, it is easy to deform it in the axial
direction while it resists deformation in the radial
direction. The cylinder can be bent in a plan (or in
any direction, if it has 3 chambers) by appropriately
controlling the pressure in the two (three) chambers
(Figure 3). This tube has a hyper-redundant structure
with a great number of points of mobility.
3 HIERARCHICAL CONTROL
The problem of controlling coordinating robotic sys-
tems with multiple chains in real time is complex. A
multiple chain hyper-redundant system is more
complicated. A hyper-redundant robotic element is a
physical system with a great flexibility, with a distri-
buted mass and torque that can take any arbitrary
shape. Technologically, such systems can be obtain-
ned by using a cellular structure for each element of
Figure 2: Physical structure of the special glove
Figure 3: Physical structure of the tube
the tube. The control can be produced using an elec-
tro-hydraulic or pneumatic action that determines
the contraction or dilatation the peripheral cells. The
first problem is the global coordination problem that
involves coordination of several hyper-redundant
elements in order to assure a desired trajectory of a
load. The second problem is the local control
problem, which involves the control of the
individual elements of the fingers to achieve the
desired position. The force distribution is a sub-
problem in which the motion is completely specified
and the internal forces/torques to effect this motion
is to be determined. To resolve this large - scale
control problem, a two - level hierarchical control
scheme is used (Cheng, 1995). The upper-level sys-
Biceps
Flexor carpi
radialis
Flexor pollicis
brevis
A FUZZY CONTROLLER FOR A SPECIAL GLOVE TO A HAND WITH DISABILITIES
271

Figure 4: A multiple-chain hyper-redundant system
tem collects all the necessary information and solves
the inter-chain coordination problem, the force
distribution problem. Then, the problem is
decoupled into 5 lower-level sub-systems (5 fingers)
4 MODEL FOR COOPERATIVE
HYPER-REDUNDANT GLOVE
ELEMENTS
A multiple-chain hyper-redundant system of the
glove is presented in Figure 4. With the chains of the
system forming closed-kinematics loops, the
responses of individual chains are tightly coupled
with one another through the reference member
(object or load). The complexity of the problem is
considerable increased by the presence of the hyper-
redundant elements,
(
)
kjTM
j
K1, = , the systems
with, theoretically, a great mobility, which can take
any position and orientation in space
(Ivanescu,
1984
), (Ivanescu, 1986). The dynamic equations for
each chain of the system are:
(
)
(
)
[]
+
∫
−+−ρ 'ds
s
0
j
'q
j
'q
j
qcos
2j
'q
j
'q
j
qsin
j
A
j
&&&
∫
==τ+ρ
s
0
5,..1j,
j
T
j
'ds
j
qcosAg
(1)
∫
=+
∫
−=
∫
τ
⎟
⎠
⎞
⎜
⎝
⎛
j
L
0
5,..1j,ds
j
qcos
j
x
F
j
L
0
ds
j
qsin
j
x
F
j
L
0
ds
j
(2)
where we assume that each element (TM
j
) has a
uniform distributed mass, with a linear density
ρ
j
and a section A
j
. We denote by s the spatial variable
upon the length of the arm, s
∈ [0, L
j
]. We also use
the notations: q
j
- Lagrange generalized coordinate
for TM
j
( the absolute angle), q
j
= q
j
(s,t), s ∈ [0,L
j
] ,
t
∈ [0,t
f
], q'
j
= q
j
(s', t), s' ∈ [0, s] , t ∈ [0, t
f
], T
j
=
T
j
(s, t) - the distributed torque over the tube; τ
j
=
τ
j
(s, t) - the distributed moment to give the desired
motion specified on the reference member. All these
sizes are expressed in the coordinate frame of the
element TM
j
. The k integral equations are tightly
coupled through the terms
τ
j
, F
x
j
, F
z
j
where all of
these terms determine the desired motion. We
propose a two-level hierarchical control scheme
(Cheng, 1995
) for this multiple-chain robotic
system. The control strategy is to decouple the
system into k lower-level subsystems that are
coordinated at the upper level. The function of the
upper-level coordinator is to gather all the necessary
information so as to formulate the corresponding
force distribution problem and then to solve this
constrained, optimization problem such that optimal
solutions for the contact forces F
j
are generated.
These optimal contact forces are then the set-points
for the lower-level subsystems. With F
0
- the
resultant force vector applied to object expressed in
the inertial coordinate frame (0),
o
D
j
- the partial
spatial transform from the coordinate frame for the
tube TM
j
to the inertial coordinate frame (0), we
consider the hard point contact with friction and the
force balance equations on the object may be written
as:
∑
=
j
j
FDF
00
(3)
The object dynamic equations are obtained by the
form M
0
r = GF
0
(4)
where M
0
is inertial matrix of the object and r
defines the object coordinate vector
r = (x, z, ϕ)
Τ
(5)
and r(t) represents the desired trajectory of the
motion. The inequality constraints which include the
friction constraints and the maximum force
constraints may be associated to (3):
∑
≤ BFA
jj
(6)
where A
j
is a coefficient matrix of inequality
constraints and B is a boundary-value vector of
inequality constraints. The problem of the contact
forces can be treated as an optimal control problem
if we associate to the relations (3) - (6) an optimal
index (7):
F
1
F
2
ICINCO 2005 - ROBOTICS AND AUTOMATION
272
∑
=Ψ
jj
FC (7)
This problem is solved in several papers: (Cheng,
1995), (Mason, 1981), (Zheng, 1988) by the general
methods of the optimization or by the specific
procedures (Cheng, 1991). After all of the contact
forces F
j
are determinate, the dynamics of each tube
TM
j
are decoupled. Now, the equations (1), (2) can
be interpreted as same decoupled equations with a
given
τ
j
(s), s∈ [0, L
j
] acting on the tube tip.
5 APPROXIMATE MODEL
A discrete and simplified model of (1), (2) can be
obtained by using a spatial discretization:
s
1
, s
2
, ... s
N
; s
i
– s
i-1
= ∆ |q
j
(s
i
) – q
j
(s
k
)| < ε
(8)
where i, k = 1, 2, ... n
j
∆, ε are constants and ε is
sufficiently small. We denote s
I
= i∆, L
j
= n
j
∆.
() ()
j
i
i
j
j
i
i
j
sTsT
ττ
== , (9)
and considering the tube as a lightweight element,
from (1), (2) it results (Ivanescu, 1986):
J
T
J
F
J
q
J
D
J
q
J
C =++ )(
J
q
J
M
&
&&
(10)
where M
J
, C
J
are (n
J
xn
J
) contact diagonal matrixes,
D is (n
J
x2) nonlinear matrix (Ivanescu, 1986, 1995):
(
)
J
z
J
x
J
FFcolF ,= ;
(
)
J
n
JJ
J
qqcolq K
1
= ;
(
)
J
n
J
J
TTcolT K
1
= (11)
In the equation (10), F
J
assures the load transfer on
the trajectory. The uncertainty of the load m defines
an uncertainty of the force F
J
. F
MJ
is an estimation of
the force upper bound and we assume that
2,1; =≤− iFF
i
i
JMJ
ρ
(12)
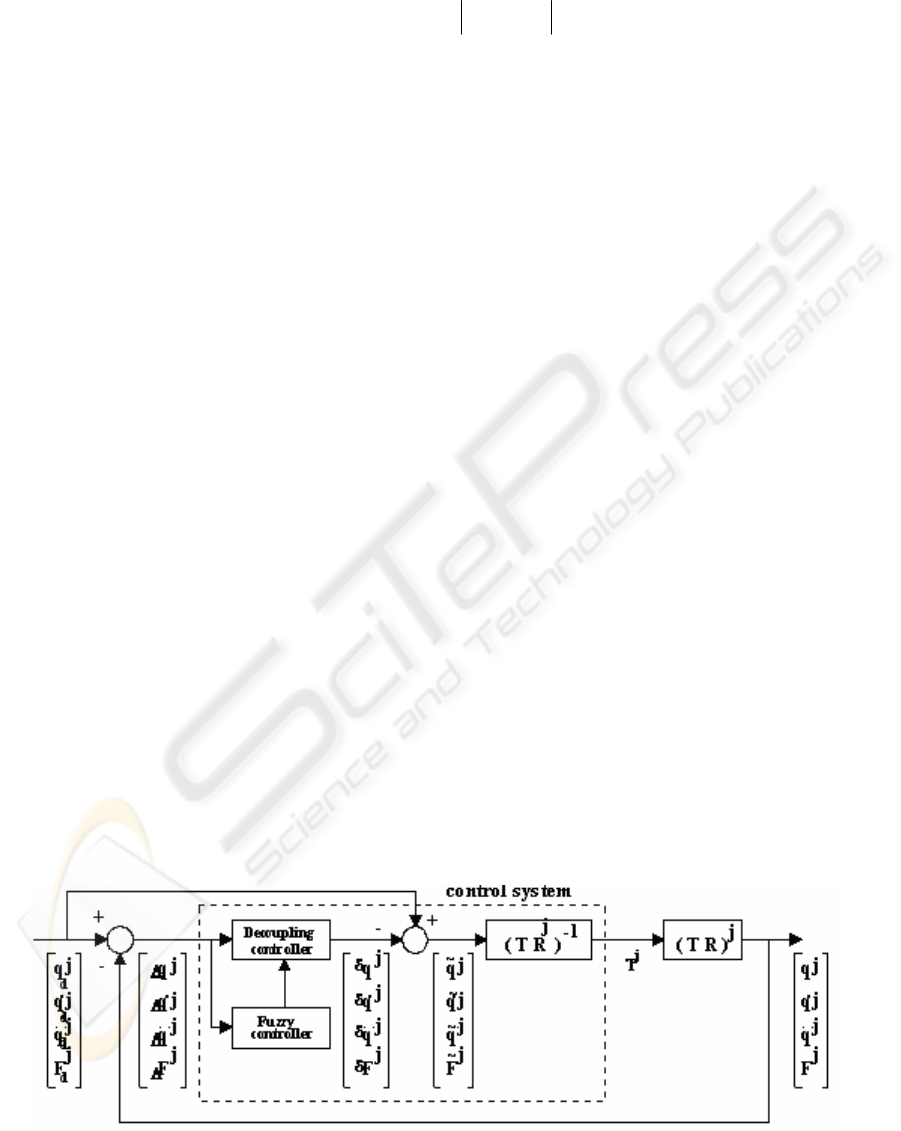
6 CONTROL SYSTEM
The control problem asks for determining the
manipulatable torques (control variable) T
i
j
such
that the trajectory of the overall system (object and
fingers) will correspond as closely as possible to the
behavior. In order to obtain the control law for a
prescribed motion, we shall use the inverse model. A
closed-loop control system is used (Figure 5). Let
qqq
d
j
d
j
d
j
,
&
,
&&
be the desired parameters of the
trajectory, F
d
j
the desired force applied at the j -
contact point of the object, and,
qqq
jjj
,
&
,
&&
, F
j
the
same sizes measured on the real system (or
estimated), the error of the feedback system is given
by:
∆qqq
j
d
jj
=−; ∆
&&&
qqq
j
d
jj
=− ;
∆
&& && &&
qqq
j
d
jj
=−; ∆F
j
= F
d
j
- F
j
The trajectory
controller serves as the trajectory perturbation
controller which generates the new variations
δ
q
j
,
δ
&
q
j
,
δ
&&
q
j
,
δ
F
j
in order to assure the
performances of the motion for the overall system.
The control law is proposed as,
jjjjjjj
qKqKqKq
&&&
∆+∆+∆=
131211
δ
;
jjjjjjj
qKqKqKq
&&&&
∆+∆+∆=
232221
δ
δ
&& & &&
q KqKqKq
jjjjjjj
=++
31 32 33
∆∆∆; (13)
Figure 5: Control system architecture
A FUZZY CONTROLLER FOR A SPECIAL GLOVE TO A HAND WITH DISABILITIES
273
δ
F KFKFKF
x
j
f
j
x
j
f
j
x
j
f
j
x
j
xxx
=++
123
∆∆∆
&&&
δ
F KFKFKF
z
j
f
j
z
j
f
j
z
j
f
j
z
j
zzz
=++
123
∆∆∆
&&&
The control law for the motion and force control
requires
0
11
I
PR PQ−−
⎡
⎣
⎢
⎤
⎦
⎥
−−
to be stable, (14)
and
()
KKK
f
j
f
j
f
j
2
2
31
41≤− (15)
where we used the notations
P
j
= (I - K
j
33
- dK
j
13
); Q
j
= (K
j
32
+ d K
j
12
) ;
R
j
= d (I - K
j
11
) - K
j
31
(16)
and we considered
j
3f
j
z3f
j
x3f
KKK ==
,
;KKK;KKK
j
2f
j
z2f
j
x2f
j
1f
j
z1f
j
x1f
====
(17)
The relations (14), (15) define the main
conditions imposed to the controller in order to
assure the global stability for the motion of the
finger and for the force F
j
d
at the terminal point of
the tube. If the condition (15) is easy to apply, the
stability of the matrix (14) is more difficult to use.
We can obtain a simplified procedure if we
choose suitable matrices K
j
m,n
(m, n =1, 2, 3) in
the control law (13):
I-K
j
33
-d K
j
13
= α I , α - integer number ;
K
j
32
+ d K
j
12
= 2
Ξ
j
;d (I-K
j
11
)-K
j
31
=
Ω
j
(18)
where
()
Ξ
jjj
n
j
diag=
ξξ ξ
12
, ,... ;
()
Ω
jjj
n
j
diag=
ωω ω
12
,,... (19)
The equations (13) become
αξω
⋅− + =∆∆∆
&& &
qqq
i
j
i
j
i
j
i
j
i
j
20
2
(20)
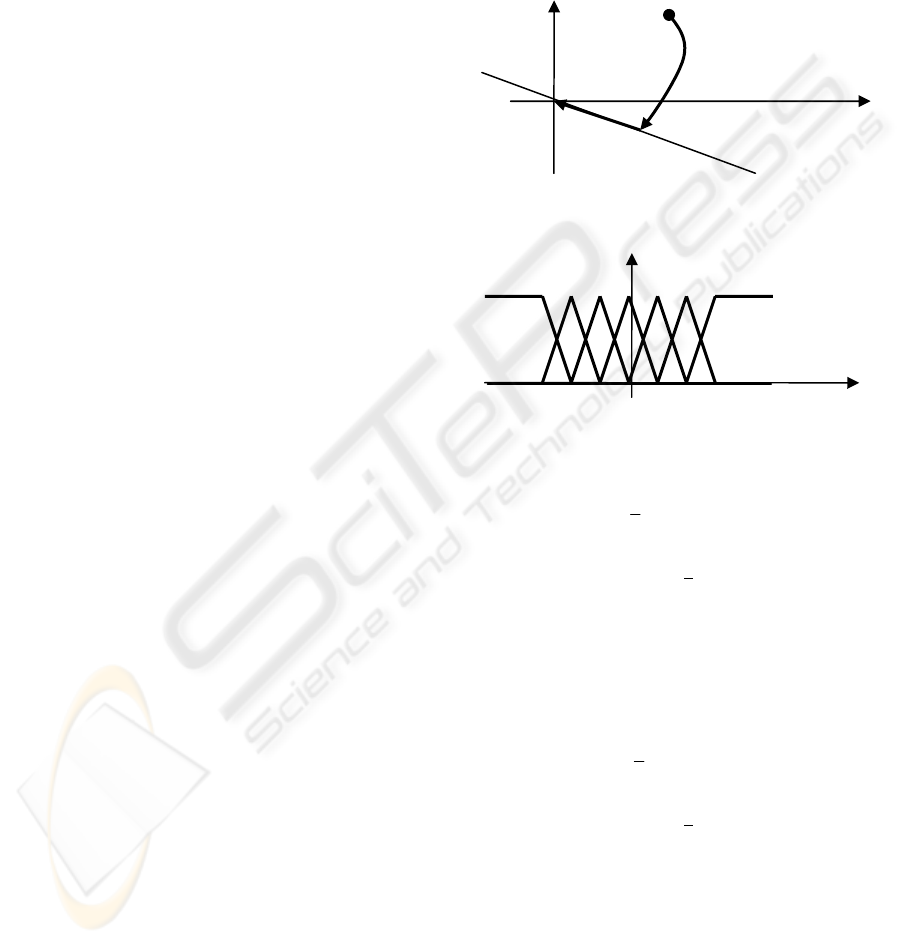
The equations for the control of the tube
parameters and for the control of the force offer a
simple control for a Direct Sliding Mod Control
(DSMC) (Ivanescu, 1995). The DSMC is a control
method which operates in two steps. First step
assures the motion towards the switching line S
q
(or S
F
):
∆∆
&
qpq
i
j
i
j
i
j
+=0 ; ∆∆
&
FpF
j
iF
jj
+=0 (21)
by the general stability conditions (Figure 6).
Figure 6: DSMC method
Figure 7: The membership functions for control
variables
()
[]
2
1
2j
i
S
j
i
smin αω<ξ ;
()
()
KKK
f
j
f
j
f
j
231
1
2
21≤−
j = 1, 2 (22)
When the trajectory penetrates S
q
(or SF), the
damping coefficients
ξ
i
j
f
j
K,
2
are increased ,
()
[]
2
1
2j
i
S
j
i
smax αω>ξ ;
()
()
KKK
f
j
f
j
f
j
231
1
2
21>− j = 1, 2
(23)
The system is moving towards the origin, directly,
on the switching line S
q
(or S
F
).
The switching line S
F
, S
q
= 0
j
i
q
&
∆
j
i
q∆
j
F
&
∆
j
F∆
I
II
0
-2.0
-1.0 0 1.0 2.0
NB NM NS NZ PZ PS PM PB
jj
FF
&
∆∆ ,
j
i
j
i
qq
&
∆∆ ,
ICINCO 2005 - ROBOTICS AND AUTOMATION
274
7 FUZZY CONTROLLER
A fuzzy control is proposed by using the control of
the damping coefficient
ξ
i
j
f
j
K,
2
in (22)-(23). We
consider a DSMC strategy with the switching of a
control variable on the switching line (21), (Figure
6).
We shall let the errors ∆q
i
j
, ∆F
j
and the error rates
∆∆
&
,
&
qF
i
jj
be defined by eight linguistic variables,
labelled NB, NM, NS, NZ, PZ, PS, PM, PB
partitioned on the error spaces [-∆q
m
, ∆q
m
], [-F
m
,
∆F
m
] and the error rate spaces represented here
[][]
−−∆∆ ∆∆
&
,
&
,
&
,
&
qq FF
mm mm
where all these
quantities are normalized at the same interval. The
membership functions for these quantities are
shown in Figure 7. The fuzzy output variables, the
control coefficients
ξ
i
j
f
j
K,
2
, will use four fuzzy
variables on the normalized universe:
ξ
i
j
i
j
F
**
=={ 0, 0.5, 1.0, 1.5, 2.0, 2.5 }
where the range of the values is chosen such that
()
⎩
⎨
⎧
⎢
⎣
⎡
+
⎟
⎠
⎞
⎜
⎝
⎛
αω
ξ
ξ
=
2/1
2j
i
j
maxi
j*
i
)s(min
2
1
1
()
⎭
⎬
⎫
⎥
⎦
⎤
⎟
⎠
⎞
⎜
⎝
⎛
αω+
2/1
2j
i
)s(max
(24)
for the damping coefficient
ξ
i
j
, and for the force:
()
()
121
2
31
1
2
=−
F
K
KK
j
f
j
f
j
f
j
*
max
(25)
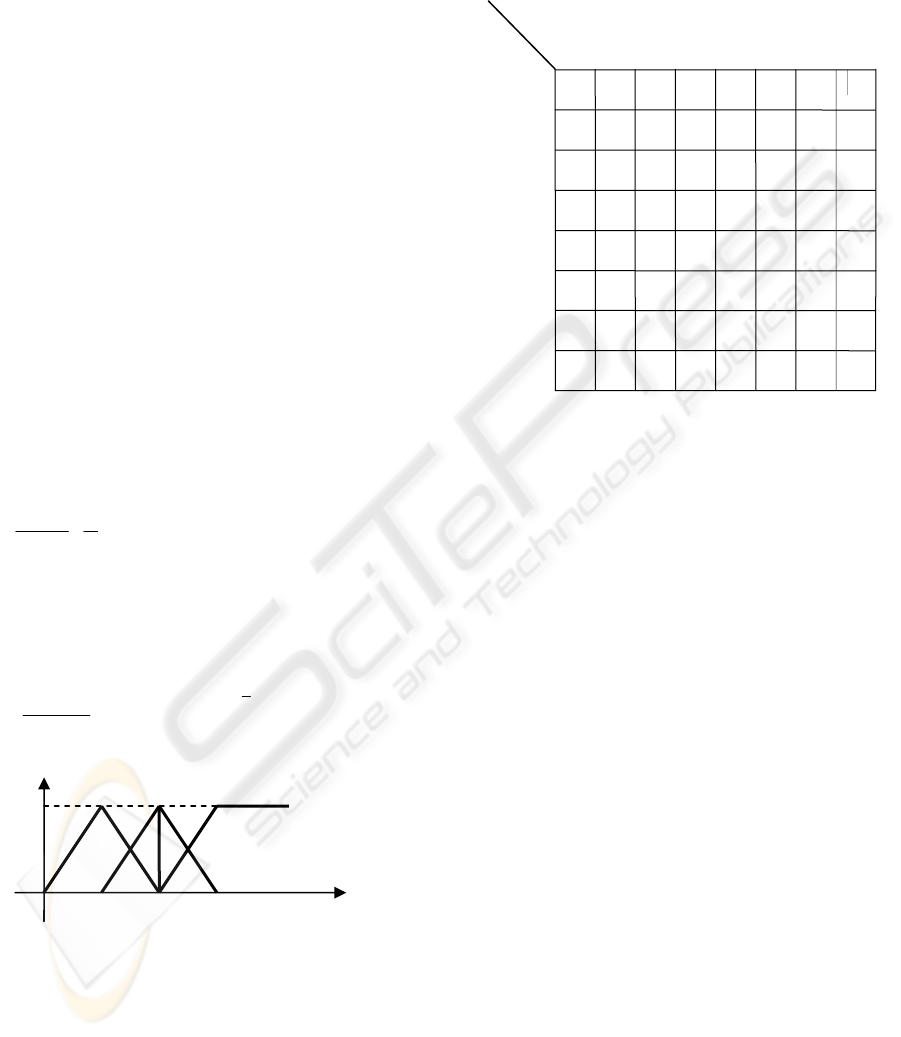
Figure 8: The memberships of the output variables
The memberships of the output variables are
represented in Figure 8, where ST1, BT1 define
linguistic variable: SMALLER THAN 1 and
BIGGER THAN 1, respectively. According to the
theoretical results obtained in the previous part of
the paper, we can generate the control rules which
establish a fuzzy control for a DSMC control
(Table 1).
The main idea is to assure the normal control
towards the switching line and direct control when
the trajectory penetrates this line. A standard
defuzzification procedure based on the centroid
method is then used.
REFERENCES
Cheng F.T., Orin D.E., 1991. Optimal Force Distribution
in Multiple-Chain Robotic Systems. IEEE Trans. on
Sys. Man and Cyb., Jan., vol. 21, pp. 13-24.
Cheng F.T., Orin D.E., 1991. Efficient Formulation of
the Force Distribution Equations for Simple Closed-
Chain Robotic Mechanisms. IEEE Trans on Sys.
Man and Cyb., Jan., vol. 21, pp. 25-32.
Cheng F.T., 1995. Control and Simulation for a Closed
Chain Dual Redundant Manipulator System. Journal
of Robotic Systems, pp. 119-133.
Ivanescu M., Badea I., 1984. Dynamic Control for a
Tentacle Manipulator. Proc. of Int. Conf.,
Charlotte, USA.
Ivanescu M., 1986. A New Manipulator Arm: A
Tentacle Model. Recent Trends in Robotics, Nov.,
pp. 51-57.
Ivanescu M., Stoian V., 1995. A Variable Structure
Controller for a Tentacle Manipulator. Proc. of the
1995 IEEE Int. Conf. on Robotics and Aut.,
Nagoya, Japan, May 21-27, vol. 3, pp. 3155-3160.
Ivanescu M., Stoian V., 1996. A Sequential Distributed
Variable Structure Controller for a Tentacle Arm.
Proc. of the 1996 IEEE Intern. Conf. on Robotics
and Aut., Minneapolis, April, vol. 4, pp. 3701-3706.
Ivanescu M., Stoian V., 1996. A Micro-Tentacle
B BT1 BT1 BT1 S S S S
BT1 B BT1 BT1 S S S S
BT1 BT1 B BT1 S S S S
BT1 BT1 BT1 B ST1 ST1 ST1 ST1
ST1 ST1 ST1 ST1 B BT1 BT1 BT1
NB NM NS NZ PZ PS PM PB
S S S S BT1 B BT1 BT1
S S S S BT1 BT1 B BT1
S S S S BT1 BT1 BT1 B
PB
PM
PS
PZ
NZ
NS
NM
NB
j
F
&
∆
j
i
q
&
∆
j
F∆
j
i
q∆
0 0.5 1 2.5 2
j
i
ξ
j
fi
K
1
Table 1: The control rules
A FUZZY CONTROLLER FOR A SPECIAL GLOVE TO A HAND WITH DISABILITIES
275

Manipulator with ER-Fluids. Micro-Robot World
Cup Soccer Tournament, MIROSOT, Proc., Nov. 9-
12, Taejon, KOREA, vol. 1, pp. 74-79.
Khatib D.E., 1996. Coordination and Descentrali-sation
of Multiple Cooperation of Multiple Mobile
Manipulators. Journal of Robotic Systems, 13 (11),
755-764.
Mason M. T., 1981. Compliance and Force Control.
IEEE Trans. Sys. Man Cyb., Nr. 6, pp. 418-432.
Neumann D., 2002. Kinesiology of the musculoskeletal
system, Mosby Philadelphia, pp. 85-90.
Ross T.J., 1995. Fuzzy Logic with Engineering
Applications, Mc.Grow Hill, Inc.
Schilling R.J., 1990. Fundamentals of Robotics, Prentice
Hall, New York.
Silverman L.M., 1969. Inversion of Multivariable Linear
Systems. IEEE Trans. Aut. Control, Vol. AC-14,.
Zaharia K., 1994. Indreptar de anatomie practica si
chirurgicala a membrelor, Ed. Paideia, Bucharest,
pp. 436-456 (in Roumanien).
Zheng Y.F., Luh J.Y.S., 1988. Optimal Load
Distribution for Two Industrial Robots Handling a
Single Object. Proc. IEEE Int. Conf. Rob. Autom.,
pp. 344-349.
Wang L.C.T., 1996. Time-Optimal Control of Multiple
Cooperating Manipulators. Journal of Robotic
Systems, pp. 229-241.
ICINCO 2005 - ROBOTICS AND AUTOMATION
276
