
A SYSTEM FOR TRIDIMENSIONAL IMAGES FROM TWO
DIMENSIONAL ONES USING A FOCUSING AND DEFOCUSING
VISION SYSTEM
Modesto G. Medina-Meléndrez
Departamento de Ing. Eléctrica-Electrónica, Instituto Tecnológico de Culiacán, Sinaloa
David Báez-López, Liliana Díaz-Olavarrieta, J. Rodríguez-Asomoza and L. Guerrero-Ojeda
Departamento de Ingeniería Electrónica, Universidad de las Américas Puebla, Cholula, Puebla
México
Keywords: Image processing, Depth information, Focusing and defocusing.
Abstract: Machine vision has been made easier by the development of computer systems capable of processing
information at high speeds and by inexpensive camera-computer systems. A Camera-Computer system
called SIVEDI was developed based on the shape from focusing (SFF) and shape from defocusing (SFD)
techniques. The SIVEDI system has as entries the images captured by the camera, the number of steps of
the focusing mechanism, and user specifications. The focusing mechanism used is the internal one of the
camera and a computer-camera interface was designed to control it. An equation is introduced to obtain the
measure of relative defocusing among many images. A 3D image is produced as the result of the system.
SIVEDI consist of a number of modules, each one implementing a step in the system model. The modules
are independent of each other and could be easily modified to improve the system. As SIVEDI was
developed in a MATLAB environment it can be used in any computer with this software installed on it.
These characteristics allow users to access intermediate results and to control the system internal
parameters. Results show that the 3D image reconstruction has an acceptable quality.
1 INTRODUCTION
The 3D recovery information of a scene using
bidimensional images is a fundamental problem in
machine vision systems. Researchers in this area
have created a variety of sensors and algorithms that
can be classified into two categories: active and
passive. Active techniques, as point triangulation
and laser radar, produce very precise depth maps and
have been used in many industrial applications. But,
when the scene can not be controlled, as it is the
case of distant objects in big scale scenes, active
techniques have proved to be unpractical. As a
consequence passive techniques are used because
they offer better results. Passive techniques, as
stereo and movement structures, depend upon
algorithms that establish correspondence among two
or more images. The process to determine
correspondence is computationally expensive. Other
passive techniques are based in the focus analysis of
many images. Shape From Focus (SFF) uses a
sequence of images captured with small changes in
the internal parameters of the camera optics. For
each pixel the parameters of the focus that
maximizes the images contrast are determined.
These focusing parameters can be used to calculate
the depth of the analyzed point in the scene and to
produce very precise measurements.
In contrast, Shape From Defocus (SFD)
uses only a few images with different optics
parameters. The relative defocusing of the images
can be used to determine depths. The focus level of
the images can be varied changing the optics
parameters of the lens, moving the camera image
sensor with respect of the lenses, or changing the
aperture size. SFD does not present correspondence
problem and missing parts problem in the analysis.
These advantages make SFD an attractive method to
determine depths. The objective of this work is to
implement a camera-computer system to estimate
object depths in a 3D scene using focus analysis in
bidimensional imagines. In machine vision systems
a typical camera, used in passive techniques, carries
many noise sources, as optics noise and electronic
475
G. Medina-Meléndrez M., Báez-López D., Díaz-Olavarrieta L., Rodríguez-Asomoza J. and Guerrero-Ojeda L. (2005).
A SYSTEM FOR TRIDIMENSIONAL IMAGES FROM TWO DIMENSIONAL ONES USING A FOCUSING AND DEFOCUSING VISION SYSTEM.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 475-478
DOI: 10.5220/0001190004750478
Copyright
c
SciTePress
noise. As a consequence, errors in the estimation are
inevitable, but they are minimized by establishing
two noise thresholds. An important objective is to
implement a set of subroutines to execute the SFF
and SFD techniques. Also a user interface has been
developed to implement these techniques. The final
system was verified with a series of experiments.
The obtained results present a good precision in the
estimation of depth when the objects contain high
contrast.
2 SIVEDI
A system called SIVEDI (acronym for the Spanish
name Sistema de Visión por Enfoque y Desenfoque
de Imágenes) was developed. SIVEDI can be used to
verify the SFF and SFD theories. The SIVEDI
system is divided into a set of modules, in such a
way that it can be easily modified to implement
different estimation depth techniques which use
image focusing analysis.
The camera-computer system and the set of
subroutines that constitute SIVEDI are described in
the next sections.
2.1 Camera computer system
SIVEDI was built in the Electronics Laboratory of
the Universidad de las Américas, Puebla, México.
The image sensor is a camera Sony DCR-TRV120,
the video signal is digitized by a Video Frame
Grabber Board HRT-218-5, the algorithms are
implemented in an Intel Pentium PC. The camera
focusing is executed using the LANC protocol of the
video-cameras SONY. An interface between the
serial port of the computer and the LANC plug of
the camera was implemented to execute the different
focusing commands. The Video Frame Grabber
captures monochromatic images with 640X80 pixels
and 8 bits per pixel. A windows interface was
implemented to execute the analysis in a direct way.
The implemented subroutines execute: the control
commands of the camera, the control of the Video
Frame Grabber Board, and provide a set of modules
to perform the SFF and SFD analysis.
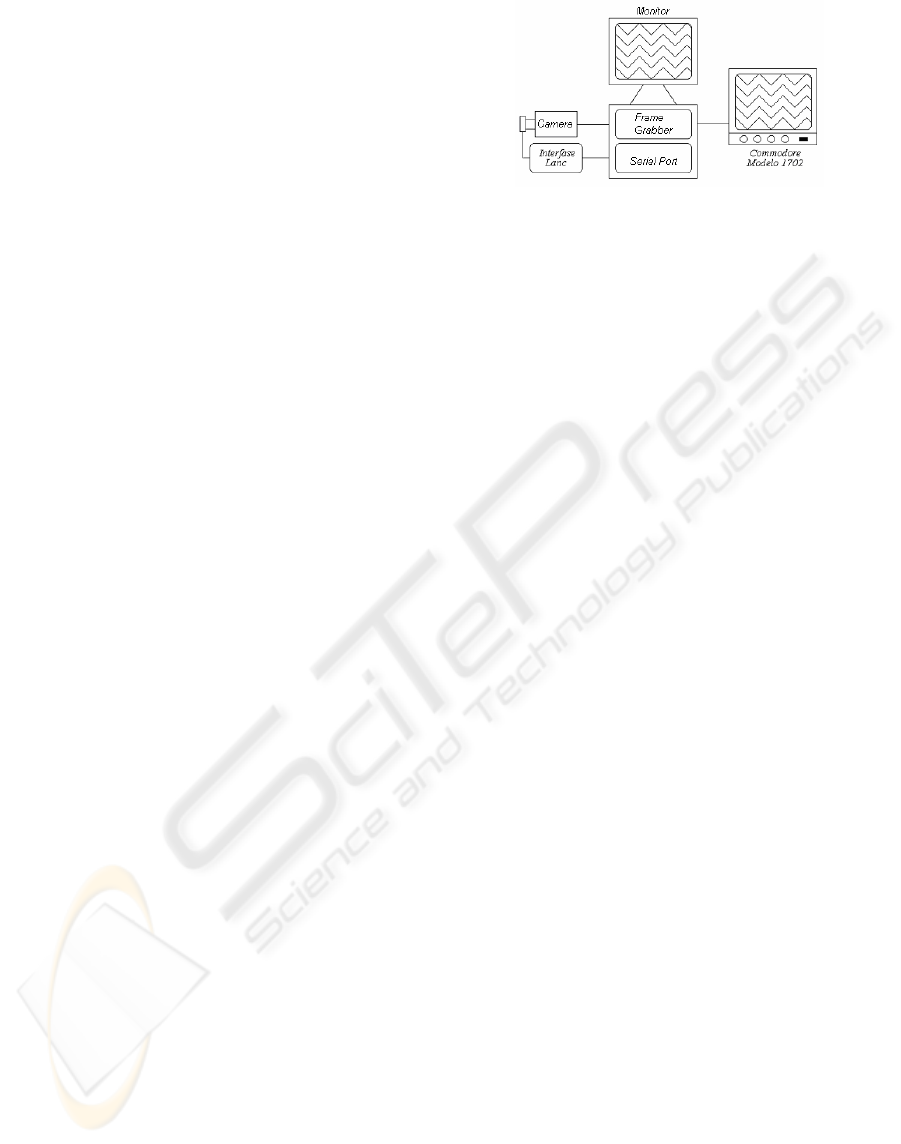
2.1.1 ANC Interface
The computer-camera interface, which controls the
camera commands, was implemented using a
PIC16F84A.
Figure 1: Implemented System
The PIC was programmed such a way that when the
computer sends a command (corresponding to the
LANC protocol) it synchronizes itself with the
camera and resends the command. The use of an
interface was needed because it is not possible to
synchronize the serial communication port LANC of
the camera with the serial communication port of the
computer. In addition, the computer indicates the
camera how many times it must execute the
command.
2.2 Implemented Software
For the SFF and SFD applications, it was needed to
design a set of subroutines to find error value
thresholds. Also, calibration was needed the system
to establish an unequivocal relation between the
focus step and the object depths for SFF, as a
relation between the relative defocus and the object
depths for SFD. In the following subsections are
described the implemented algorithms.
2.2.1 Noise Thresholds T1 and T2
In regions of low contrast in an image the methods
SFF and SFD do not work properly, so it is needed
to define a minimum value of focus measurement or
minimum value of contrast. In the case that
measurements are not over this value any obtained
estimation is rejected. The obtained thresholds are
T1 for SFF and T2 for SFD. T1 is the minimum
value a focus measure must have to be accepted.
This value was obtained with the following
procedure: A low contrast object was placed in a
known position from the camera and the focus
measure was obtained in a 16X16 pixels region. The
used focus measure was the Laplacian Energy. The
Laplacian is a high-pass filter, the opposite effect of
defocusing, that is, a low-pass filter. The
measurements were performed over many regions in
the image and many positions of the object. T1 is
defined as the media of the measurements plus three
times the standard deviation. T2 is a threshold which
is obtained in a similar way as T1, but in place of
using the focus measure of a unique image, it is used
ICINCO 2005 - ROBOTICS AND AUTOMATION
476

the sum of the focus measurements of the captured
images for each region and each positions of the
object. T2 is the media of the measurements plus
three times the standard deviation.
2.2.2 SFF Implementation
A set of subroutines was developed to implement
SFF: an autofocus algorithm that find the focus step
where the image is in focus, a method to deduce the
equation that relates an obtained focus step with the
object depth, and the SFF algorithm to estimate
depths of every objects in a 3D scene.
The autofocus algorithm performs a search
of the best focused image among a sequence of
images (to reduce noise, each image is an average of
4 captured images with the same optics). Once the
best focused image is obtained among the image’s
sequence a quadratic interpolation is performed over
the focus steps of the rear image, the focused image
and the previous image. The interpolation maximum
is found and the focus step which corresponds to this
maximum is defined as the focus step where the
image is in focus.
The procedure to find the relation between
the focus step and the object depth is described next.
First, the object is placed in a known position and
the autofocus is executed, this produces the focus
step where the best focus measure is obtained, and
the match focus step-object depth is recorded. This
procedure is repeated for many object positions
keeping the step increment uniform. Once every
match is obtained, a polynomial equation is adjusted
to these points. The obtained polynomial is used in
the equation that must be used to calculate the
searched correspondence. The final polynomial, with
a 300 step zoom from the ZoomWide is
73.23488.1023.00025.0
1034.11082.2
23
4558
+−+−
×+×−=
−−
XXX
XXdist
(1)
The SFF algorithm produces estimations in 16x16
pixel regions. Each 16x16 pixel region in an image
corresponds to the same 16x16 pixel region in each
captured image. This technique consists in finding
the focus step in which the maximum focus measure
is obtained for each 16x16 pixel region. After
capturing the complete image sequence the focus
measure is performed over every 16x16 pixel region
in every image. Then, the maximum among focus
measurements in the image sequence for each region
is searched.
To improve the depth definition a quadratic
interpolation is performed over the focus
measurements of the focused image, the following
image, and the previous one. This interpolation is
executed over each vision region, obtaining an
estimation of focus steps that corresponds to
different depths.
To calculate the depth of all the regions in
the scene equation 1 is used, where X is the Focus
Step. An experimental test using SFF is shown in
figure 2.
(a) (b)
Figure 2: a) Analyzed scene and b) Obtained estimation
using SFF
2.2.3 SFD Implementation
A few images are needed to be captured in order to
determine a 3D scene using SFD technique. In
previous works just two images of the scene have
been used. As a consequence, the range of detected
depths has been limited. In this work a method is
proposed to determine the quantity of images to be
captured as a consequence of the range of depth to
be estimated. First, for a specific object placement, a
focus measure curve is analyzed looking for the
main lobule. The step increment between captures is
established as the half wide of the main lobule of the
focus measure curve. As a result of knowing the
upper and lower limits of the depth measurements,
the quantity of images to be captured can be
established. This capture interval is needed because
the main lobule must be sampled at least at two
points.
The following equation is proposed to be
used in order to get the relative defocus of the
captured images.
∑
∑
=
=
+−
=
k
j
k
j
Gj
jkGj
P
M
1
1
]12[
(2)
where k is the quantity of captured images, Gj is the
focus measure (Laplacian) over each one of the k
images. M/P is the relative defocusing that observes
a linear behaviour in the analysis region, so for each
obtained M/P value there exists just one
corresponding depth. To obtain the correspondence
between M/P and Depth it is needed to use an
equation in which the known value is M/P and the
calculated value is the distance of the object. The
procedure to obtain such an equation is described
A SYSTEM FOR TRIDIMENSIONAL IMAGES FROM TWO DIMENSIONAL ONES USING A FOCUSING AND
DEFOCUSING VISION SYSTEM
477

next. First, an object is placed in a known position
(depth) from the camera, M/P is calculated and the
match M/P-Depth is recorded. This is repeated for a
variety of object positions, getting a table of M/P-
Depth matches. Then, a curve adjustment is
performed getting a polynomial which is the
searched equation. In this work a 300 steps zoom is
used from the ZoomWide. The obtained equation is
5881210621210524
1096106091
122
3344
.Y.Y.
Y.Y.dist
+×+×
+×+×=
−−
−−
(3)
The depth estimation is realized over 16x16 pixel
regions. First, k images are captured, M/P is
calculated for each region in the scene and equation
3 is used to estimate the depth of each region where
Y is M/P value. Figure 3 shows the result of
applying this method over a scene.
2.2.4 User Interfase
SIVEDI has a user interface developed with
MATLAB subroutines. The user has complete
access and control over the system to specify the
analysis to perform. When the user interface is
executed the main window appears and shows if the
system is calibrated or not. In order to be calibrated
the system must contain the equation Focus Step-
Depth to be applied in SFF and the equation M/P-
Depth to be applied in SFD. If the user wishes to
calibrate the system, a window appears that guides
the user in this task. Once the system is calibrated,
the main window shows the options to perform the
analysis SFF or SFD. For any analysis it is possible
to record the obtained estimation. The default
parameters for the analysis are: the region size of
analysis (16x16 pixels), the quantity of captured
images for SFF (25 images), the increment in focus
steps at which the images are captured for SFF, the
quantity of captured imaged for SFD (7 images), the
focus steps at which the images are captured for
SFD, the focus measure (Laplacian), and the
estimation range (7 to 50 centimetres). If any of
these parameters should be modified, it is done
directly in the implemented subroutines in m files.
3 CONCLUSIONS
The execution time of SFF is reduced, because the
quantity of captured images is reduced and an
interpolation is used among three images to obtain
the maximum measure. The noise is minimized
using the average of four images for the SFF
analysis. The implemented platform prevents the use
of two images in the SFD analysis, as a consequence
a method to determine the needed captured images
to perform the SFD analysis is proposed.
(a) (b)
Figure 3: a) Analyzed scene and b) obtained estimation
using SFD
Also, the use of an equation (M/P) to calculate the
relative defocus among the captured images is
proposed. This measure is related with the depth of
the object. The noise is reduced using the average of
eight images for the SFD analysis.
The obtained results show that SFD is less sensitive
to noise than SFF, but is more sensitive to spectral
content over the analyzed regions. It is harder to
calibrate SFD than SFF. The execution time is lower
for SFD than for SFF. Images must contain high
contrast in order to both techniques work properly.
REFERENCES
Hecht E., 2000. “Optica”, Addison Wesley, Madrid,
Third Edition.
Jenn K. T1997. “Analysis and Application of
Autofocusing and Three-Dimensional Shape
Recovery Techniques based on Image Focus and
Defocus”, PhD Thesis, SUNY in Stony Brook,.
Nayar S.K., M. Watanabe and M. Noguchi 1995. “Real-
time focus range sensor”, Intl. Conference on
Computer Vision, pp. 995-1001, June.
Subbarao M., “Spatial-Domain Convolution
Deconvolution Transform”, Technique Report No.
91.07.03, Computer Vision Laboratory, State
University of New York, Stony Brook, NY 11794-
2350.
Subbarao M, T. Choi, y A. Nikzad 1992. “Focusing
Techniques”, SPIE Conference, OE/TECHNOLOGY
`92, Vol. 1823, pp 163-174, Boston, MA.
Subbarao M. y M.C. Lu, 1994. “Computer Modeling and
Simulation of Camera Defocus”, Machine Vision and
Applications, pp 277-289.
Subbarao M., y J.K. Tyan, “The Optimal Focus Measure
for Passive Autofocusing and Depth-from-Focus”,
SPIE Conference on Videometrics IV, Vol. 2598,
Philadelphia PA, pp. 89-99, October 1999.
ICINCO 2005 - ROBOTICS AND AUTOMATION
478
