
Cooperative Control Of A Robot Swarm With Network
Communication Delay
Yechiel Crispin
Department of Aerospace Engineering,
Embry-Riddle University, Daytona Beach, FL 32114, USA
Abstract. A new method for the cooperative control of a system of multiple
mobile robots with time delay in the network communication is presented. The
network of mobile robots is modeled as a swarm of particles performing a di-
rected random walk where the motion of the swarm is controlled by a central unit
such as a robot leader. The collective motion of the robots is modeled by a sys-
tem of stochastic delay-difference equations where the best solution found by the
swarm is used as the network cooperative control signal. The method is applied
to the solution of two problems. In the first problem, a group of autonomous un-
derwater vehicles (AUVs) searches for the maximum depth in a two-dimensional
domain. In the second problem, the group of AUVs searches for the minimum
temperature in a three-dimensional domain. It is found that the search proceeds
along Levy flights followed by sticking short random walks in the vicinity of the
extremum points and that the cooperative control method is robust to time delays
in network communication.
1 Introduction
In the past, robots have been used in many practical applications such as industrial ro-
bots in manufacturing, spacecraft and rover robots for space exploration and unmanned
air vehicles (UAVs) for reconnaissance, surveillance and tactical military missions.
Other possible applications include underwater missions by autonomous underwater
vehicles (AUVs) such as formation control and rendezvous, search and rescue missions
and exploration and mapping of unknown environments. At the beginning, single ro-
bots were employed in the performance of any given task. It has been recognized for
some time, however, that the use of collaborating multiple mobile robots can have sig-
nificant advantages in achieving complex tasks and missions which otherwise might
not be achievable with single robots. Consequently, in recent years, researchers started
treating remarkable problems related to the cooperative control of networked collabo-
rating mobile robots with distributed resources such as sensors, computing power and
communications [1], [2] and [3].
The present paper represents a step in that direction. Consider a specific implemen-
tation of a group of mobile robots in the form of a group of auto-nomous underwater
vehicles, assigned with the collective task of exploring a limited domain of a body
of water such as a lake, sea or a limited part of the ocean. Let’s consider a specific
task where the robots have to collectively find the extremum of an otherwise unknown
Crispin Y. (2005).
Cooperative Control Of A Robot Swarm With Network Communication Delay.
In Proceedings of the 1st International Workshop on Multi-Agent Robotic Systems, pages 3-14
DOI: 10.5220/0001193400030014
Copyright
c
SciTePress

function using a given experimental method where they can measure a property of the
environment such as water depth or temperature at any required point, see for exam-
ple [4] and [5]. The simplest such test problem is for the group of robots to collectively
search the maximum depth in a limited area; for example a group of 10 robots searching
an area of 1 km by 1 km and measuring the depths using a depth finder device. Another
problem might be to find the minimum temperature or maximum concentration of some
chemical compound or density of plankton in a three dimensional domain, say a body
of water of 1 km by 1 km by 100 m deep.
In developing the present method of cooperative control, it is assumed that each
autonomous vehicle has a low level control system that can control the motion of the
robot and bring it from one point in the domain to the next at the right speed and
orientation. It is also assumed that each autonomous vehicle is equipped with a collision
and obstacle avoidance control system for preventing collisions with other robots and
obstacles. The robots network architecture is in the form of a leader robot acting as a
server and communicating with the other robots as clients. The principle of control of
the network of robots is the robot swarm cooperative control method described in the
next section. Each robot has a microprocessor computing device on board, which is
capable of running the robot swarm algorithm.
We propose to use the paradigm of a modified particle swarm optimization algo-
rithm as a top level discrete event controller for the cooperative control of the group of
mobile robots. Each robot sends the best solution found at any given time to the leader
or other central processing station through its communication channel. The leader in
turn computes the global best solution and transmits the result as a control signal to
the network. The Particle Swarm Optimization (PSO) is a stochastic population based
method that belongs to the class of biologically inspired algorithms. It is based on the
paradigm of a swarm of insects performing a collaborative task such as ants or bees for-
aging for food using chemical or some other type of communication, see for example
[6] and [7]. The method was originally developed by [8] and later described in great
detail as a Swarm Intelligence method in [9]. An overview of the method as extensively
applied to various function optimization problems of increasing difficulty, has recently
been given by [10]. To the best of our knowledge, this is the first time that the PSO
method has been modified and adapted for use as a top level discrete event cooperative
control method for a swarm of autonomous robots. It is also the first time that the ef-
fect of information delay on the performance of the swarm has been studied in a PSO
context.
In the next section we develop the robot swarm optimization algorithm with com-
munication delay and we explain how it can be applied to solve the two problems men-
tioned previously. In the first problem, a group of robots collectively searches for the
maximum depth in a limited 2-D domain. In the second problem, the group of robots
searches for the minimum temperature in a 3-D domain.
2 Cooperative Control Of The Robot Swarm
The Robot Swarm cooperative control method is derived from the Particle Swarm Opti-
mization algorithm. Two major modifications are made in order to implement the search

method by actual mobile robots such as autonomous underwater vehicles or AUVs. The
first modification imposes a limitation on the speed of the vehicle, or equivalently, a
limit on the distance ∆X
max
it can move in a time step ∆t. The second modification
takes into account the effect of imperfect communication between the group of robots.
At any given time, communication with one or more robots can be completely cut off
or otherwise attenuated or corrupted by noise due to the harsh underwater environment.
Therefore, rather than assuming that the global minimum is available to the swarm at all
times as in the case of perfect communication, we introduce a time delay in communi-
cating the global minimum to all members of the swarm. To the best of our knowledge,
the effect of a time delay on the performance of the swarm has not been treated so far
in the literature. The particle swarm optimization algorithm with no speed constraints
and with perfect communication consists of minimizing a function of several variables
minimize f(X), where
X ∈ Ω ⊂ R
n
and f : Ω 7→ R
subject to the side constraints
X
min
≤ X ≤ X
max
using a directed random walk process described by the following system of stochas-
tic difference equations:
X
i
(k + 1) = X
i
(k) + V
i
(k + 1)∆t (2.1)
V
i
(k + 1) = wV
i
(k) + c
1
r
i
1
(P
i
(k) − X
i
(k))/∆t+
+c
2
r
i
2
(P
g
(k) − X
i
(k))/∆t (2.2)
Here w, c
1
and c
2
are real constants, r
i
1
and r
i
2
are random variables uniformly dis-
tributed between 0 and 1. The superscript index i denotes robot number i ∈ [1, N
R
]
where N
R
is the number of robots in the swarm and k is a discrete event counter. The
velocity vectorV
i
(k) has the same dimension n as the space position vector X
i
(k) and
∆t is a typical time segment used to increment the motion of the swarm of robots in the
domain Ω. Here P
i
(k) is the best solution found by robot i at time t = k and P
g
(k) is
the global minimum at time t = k.
This system of equations describes a directed random walk for each particle i in the
swarm, similar to a Brownian motion of a tracer particle in a fluid. Whereas Brownian
motion is an undirected random motion, the motion of a particle in the swarm will
have a velocity that will start as a random motion, but will eventually decay as the
particle approaches a point P
i
(k) in the domain where the function reaches a local
minimum and as the swarm as a whole approaches a point P
g
(k) of the domain where
the function reaches a global minimum, that is,
P
i
(k) = argminf(X
i
(k))

P
g
(k) = argminf(P
i
(k)), i ∈ [1, N
R
] (2.3)
The following initial conditions are needed in order to start the solution of the sys-
tem of difference equations
X
i
(0) = X
min
+ r
i
∆X
max
(2.4)
V
i
(0) = V
min
+ r
i
∆X
max
/∆t (2.5)
∆X
max
= (X
max
− X
min
)/N
x
(2.6)
N
x
is a typical number of grid segments along each coordinate component of the
position vector X. For example, if the domain consists of a two dimensional square
domain of 1000 m by 1000 m, then with N
x
= 40, we can use a typical distance
segment of ∆X
max
= 1000 m/N
x
= 25 m. If we take a typical speed of an autonomous
underwater robot as V
c
= 1 m/s, then the typical time will be t
c
= ∆X
max
/V
c
= 25
s.We can now measure X in units of ∆X
max
, V in units of V
c
and ∆t in units of
t
c
. The equations will then have exactly the same form in non-dimensional variables.
We now modify the above algorithm such that it can be physically implemented by a
group of cooperative underwater mobile robots. Before introducing the robot speed and
communication constraints, we eliminate the time from the above equations by writing
∆X
i
(k + 1) = V
i
(k + 1)∆t (2.7)
Then upon placing a limit on the magnitude of the velocity component of the ro-
bot in any given direction for a given time step , we can impose a constraint on the
magnitude of the distance components in any given direction as
|∆X
i
(k + 1)| < |V
max
|∆t = ∆X
max
(2.8)
We introduce a time delay τ in the availability of the global minimum P
g
(k − τ)
at any given time k. The time delay will be on the order of 10 time steps or more.
For example, this can be used to simulate imperfect communication between the robots
in the group and a leader robot who receives P
i
(k) from all the robots in the group,
computes the cooperative control signal P
g
(k) and sends the information back to the
network. This can also simulate a communication failure between the leader and a small
subgroup of robots for several time steps. We also make the velocity decay w(k) factor
time dependent to improve the search process when the global minimum is approached
and smaller motion steps are needed for better resolution. Under these assumptions, the
equations of motion of the swarm become:
X
i
(k + 1) = X
i
(k) + sign(∆X
i
(k + 1))
(min[|∆X
i
(k + 1)|, ∆X
max
]) (2.9)

∆X
i
(k + 1) = w(k)X
i
(k) + c
1
r
i
1
(P
i
(k) − X
i
(k))+
+c
2
r
i
2
(P
g
(k − τ) − X
i
(k)) (2.10)
subject to the side constraint
X
min
≤ X
i
(k + 1) ≤ X
max
(2.11)
The signum function term sign(∆X
i
(k + 1)) is added in order to keep the original
direction of the motion while reducing the magnitude of the step. Suppose we would
like to iterate the difference equations for N time steps, starting at a time k = τ +
1 . In this case the initial function is needed for the time interval k ∈ [0, τ]. One
possible method to simulate the delayed process is to start the iteration without any
communication between the robots. This is a worst case scenario, and if it works, this
will show that the swarm algorithm with delay is robustwith respect to time delay in
network communication. In this case the process can be started by replacing the global
minimum P
g
(k) by the local minimum for each robot P
i
(k) in Eq.(2.10), i.e., there is
no cooperative control and no communication over the initial time period k ∈ [0, τ].
X
i
(k + 1) = X
i
(k) + sign(∆X
i
(k + 1))
(min[|∆X
i
(k + 1)|, ∆X
max
]) (2.12)
∆X
i
(k + 1) = w(k)X
i
(k) + c
1
r
i
1
(P
i
(k) − X
i
(k))+
+c
2
r
i
2
(P
i
(k) − X
i
(k)) (2.13)
for k ∈ [0, τ], with the initial condition:
X
i
(0) = X
min
+ r
i
∆X
max
(2.14)
This will generate P
i
(k) for the initial time segment k ∈ [0, τ ]. As the communica-
tion starts at time k = τ + 1, we can obtain P
g
(k − τ) from the best solution obtained
at time k = τ :
P
g
(k − τ) = argminf(P
i
(τ)) (2.15)
for i ∈ [1, N
R
]. We can then iterate the equations of motion with delay for the time
interval k ∈ [τ + 1, N].
X
i
(k + 1) = X
i
(k) + sign(∆X
i
(k + 1))
(min[|∆X
i
(k + 1)|, ∆X
max
]) (2.16)
∆X
i
(k + 1) = w(k)X
i
(k) + c
1
r
i
1
(P
i
(k) − X
i
(k))+

+c
2
r
i
2
(P
g
(k − τ) − X
i
(k)) (2.17)
for the time interval k ∈ [τ + 1, N].
3 Collaborative Search In A 2-D Domain
In this section the cooperative control method developed in the previous section is ap-
plied to the problem of experimentally finding the minimum of a scalar function of two
real variables. In the context of a group of underwater vehicles, the problem consists of
finding the minimum of a scalar quantity such as depth, temperature, or the concentra-
tion of a chemical or biological species, through the measurement of the scalar quantity
by the autonomous robots as they perform a search process in the domain. We would
like to keep the robots resources to a minimum, so we limit the number of robots to 10,
although we were able to minimize 2-D functions with as little as 6 robots.
Let’s select a two-dimensional test function for which it is not easy to find the min-
imum, such as the banana function that has a curved valley.
f(X
1
, X
2
) = 10(X
1
/d)
4
− 20(X
1
/d)
2
(X
2
/d)+
+10(X
2
/d)
2
+ (X
1
/d)
2
− 2(X
1
/d) + 5 (3.1)
where d = 200 m. Consider a two dimensional domain of 1000 m by 1000m,
defined by the coordinates:
X
1
∈ [X
1min
, X
1max
] = [−500, 500]
X
2
∈ [X
2min
, X
2max
] = [−500, 500] (3.2)
We choose the number of grid segments as N
x
= 40, so that the maximum distance
traveled by any robot in any direction X
1
orX
2
in one time step is 25 m, which we
choose as one distance unit or 1 DU. The equivalent time unit TU is the time to travel
along 1 DU at a typical speed of 1 m/s, i.e. 25 s.
∆t = 1T U = 25s
∆X
1max
= ∆X
2max
=
= (X
1max
− X
1min
)/N
x
= 25m = 1DU
|V
1
|
max
= |V
2
|
max
≤ ∆X
1max
/∆t =
= 1DU/1T U = 25m/1T U = 1m/s (3.3)
The following results are for τ = 20 TU= 500 s. The number of autonomous
robots is N
R
= 10. The other parameters appearing in the equations of motion are

c
1
= 1.5 and c
2
= 2.5. w(k) decreases from an initial value of w
0
= 0.8 to a final
value of w
f
= 0.2 after N steps:
w(k) = w
f
+ (w
0
− w
f
)(N − k)/N (3.4)
The results of a simulation of the 10 robots as they search for the minimum of
the banana function are given in Figs. 1-3. The 10 robots were spread randomly over
the domain at the start of the simulation, which was run over N= 120 steps. At the
end of the simulation the trajectory of the robot that came closest to the location of
the minimum at the point (X
1
, X
2
)=(200,200) was chosen for display. The velocity
components are shown in Fig.1, with the limitation on the absolute values of the velocity
components shown along some segments of the motion. The trajectory in parametric
form, i.e., with the event counter k as a parameter, is given in Fig.2. Notice the long
segments of motion, known as “Levy flights” with maximum speed along straight lines
and segments where the robot performs a random walk about the same location. The
trajectory is shown in Fig.3. The long Levy flights along straight lines are noticeable in
the figures. Levy flights and anomalous diffusion occur in fluid flows, see for example
[11], [12], [13], [14] and in other physical phenomena [15].
0 20 40 60 80 100 120
−20
−10
0
10
20
V1
0 20 40 60 80 100 120
−20
−10
0
10
20
V2
Fig.1. Velocity components V
1
and V
2
in the X
1
and X
2
directions. The constraint on the maxi-
mum speed is apparent.
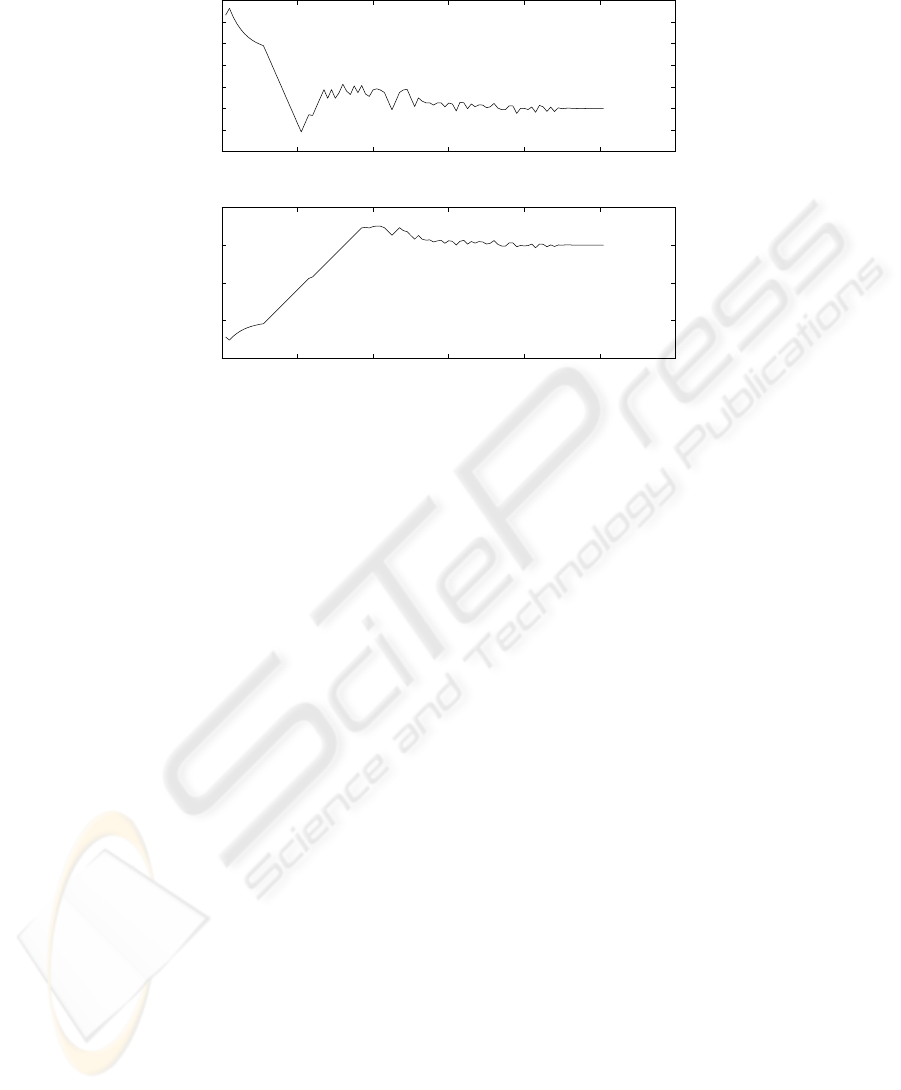
0 20 40 60 80 100 120
100
150
200
250
300
350
400
450
x1
0 20 40 60 80 100 120
−400
−200
0
200
400
x2
Fig.2. Coordinates of the best trajectory X
1
and X
2
as a function of the event counter k. Levy
flights are followed by sticking random walks.
4 Collaborative Search In A 3-D Domain
Here we consider a more difficult search problem, in which the swarm of robots is per-
forming a search for the minimum of a scalar function of three real variables. In the con-
text of autonomous underwater vehicles, the task here is to find a minimum temperature
or maximum concentration of a chemical or biological species in a three-dimensional
domain. The number of robots is limited to 10. We select a 3-D test function taken from
the literature, for example the Levy No.8 function [10]. Consider a three-dimensional
body of water with sides 1000 m by 1000 m by 1000 m deep. Select the origin of a carte-
sian system of coordinates in the center of this cube, such that the domain is defined
by:
X
1
∈ [X
1min
, X
1max
] = [−500, 500]
X
2
∈ [X
2min
, X
2max
] = [−500, 500]
X
3
∈ [X
3min
, X
3max
] = [−500, 500] (4.1)
The Levy No.8 function is defined by
f(X
1
, X
2
, X
3
) = sin
2
(πy
1
) + f
1
(y
1
, y
2
)+
+f
2
(y
2
, y
3
) + (y
3
− 1)
2
(4.2)
f
1
(y
1
, y
2
) = (y
1
− 1)
2
(1 + 10sin
2
(πy
2
))
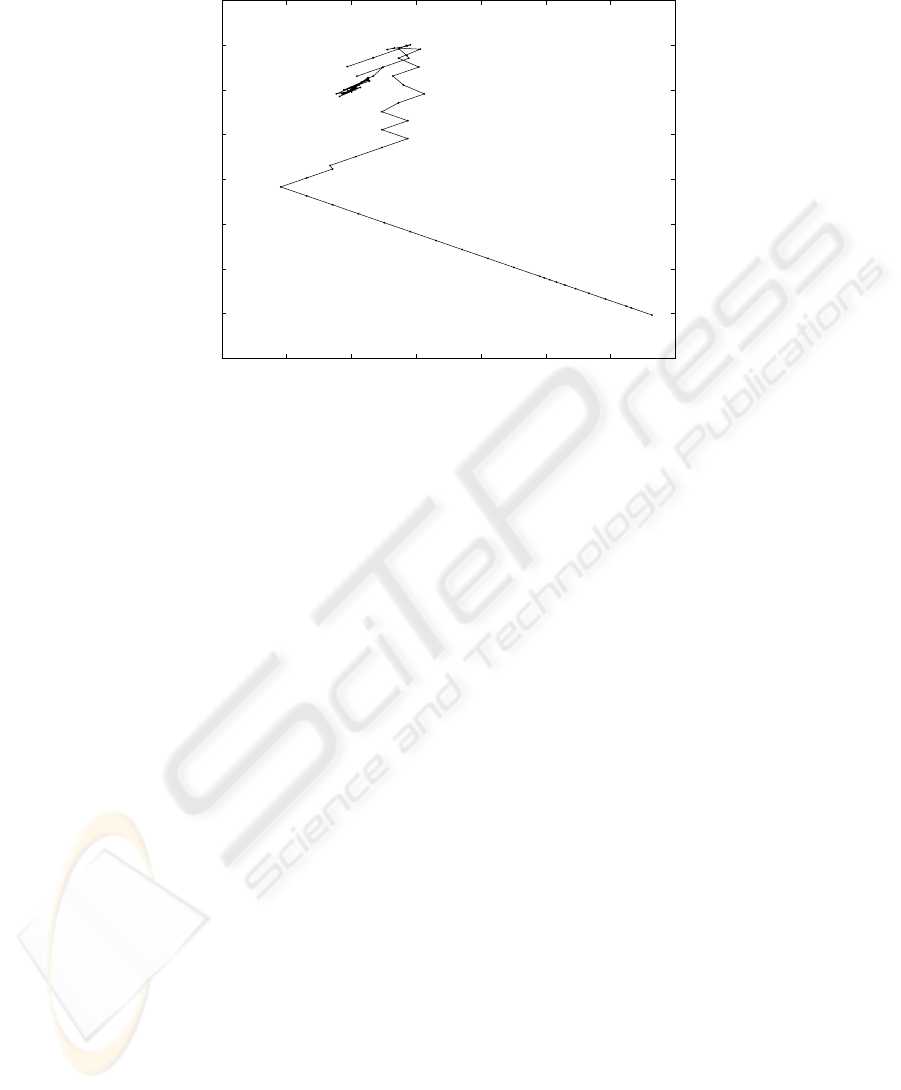
100 150 200 250 300 350 400 450
−400
−300
−200
−100
0
100
200
300
400
x1
x2
Fig.3. Same trajectory as in Fig.2 with the starting point at the lower right corner and the end
point at the minimum (200,200). Notice the Levy flights along straight line segments and random
short walks around the minimum.
f
2
(y
2
, y
3
) = (y
2
− 1)
2
(1 + 10sin
2
(πy
3
)) (4.3)
y
1
= 1 + (x
1
− 1)/4
y
2
= 1 + (x
2
− 1)/4
y
3
= 1 + (x
3
− 1)/4 (4.4)
and the coordinates x
1
, x
2
, x
3
are scaled by a length d = 50 m:
x
1
= X
1
/d, x
2
= X
2
/d, x
3
= X
3
/d (4.5)
The results are for a delay of τ = 20TU= 500s and the number of autonomous
robot vehicles is N
R
= 10. The other parameters appearing in the equations of motion
are the same as in the previous case of a 2-D function. The results of a simulation of
the group of robots collaboratively searching for the minimum of the function of three
variables are given in Figs. 4-6. The three velocity components are shown in Fig.4.
The constraint on the absolute values of the velocity components is active along some
segments of the motion. The three coordinates as a function of the event counter k are
given in Fig.5. Again there are segments of long Levy flights at maximum speed along
straight lines and segments where the robot performs a random walk in a limited area.
The trajectory is shown in Fig.6 together with a contour plot of the projection of the
f(X
1
,X
2
,X
3
) function on the plane X
2
=50. The minimum is located at (50,50,50). In
the trajectory projection, it can be seen that segments of long Levy flights are followed
by sticking random walks in the vicinity of the minimum.

0 20 40 60 80 100 120
−40
−20
0
20
40
V1
0 20 40 60 80 100 120
−40
−20
0
20
40
V2
0 20 40 60 80 100 120
−40
−20
0
20
40
V3
Fig.4. Velocity components V
1
, V
2
and V
3
in the X
1
, X
2
and X
3
directions. The constraint on
maximum speed is apparent.
0 20 40 60 80 100 120
−600
−400
−200
0
200
x1
0 20 40 60 80 100 120
0
200
400
600
x2
0 20 40 60 80 100 120
0
200
400
600
x3
Fig.5. Coordinates of the best trajectory X
1
, X
2
and X
3
as a function of the event counter k. Long
Levy flights are followed by sticking random walks in the vicinity of the minimum.
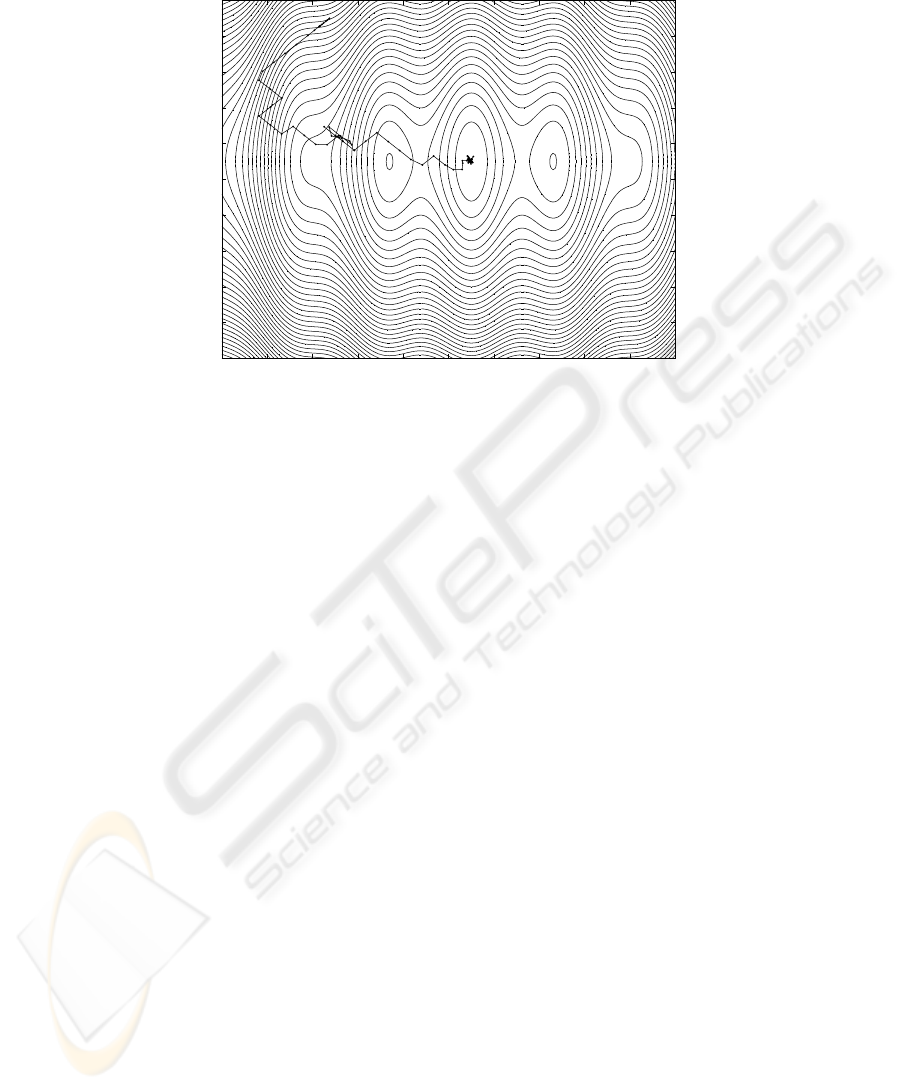
−500 −400 −300 −200 −100 0 100 200 300 400 500
−500
−400
−300
−200
−100
0
100
200
300
400
500
x1
x3
Fig.6. Contour plot of the projection of f(X
1
,X
2
,X
3
) on the plane X
2
=50, with the trajectory of
one robot. The minimum is located at (50,50,50).
5 Conclusion
A method for the cooperative control of a group of robots based on a stochastic model
of swarm intelligen ce has been developed. The network of mobile robots is modeled
by a particle swarm moving randomly in the search domain with the global motion
of the swarm directed and controlled by a central unit which can be a leader robot
or a central server. The method takes into account time delays in the robots network
communications. The motion of each robot in the swarm is governed by a system of two
delay-difference equations. The best solution found collectively by the swarm serves as
the control signal for the network of robots. The control signal can be time delayed due
to communication failure with a subset of the robots in the swarm or due to noise or
attenuation in any of the communication channels. The method was used to solve the
basic problem of collaborative search and optimization in a 2-D and in a 3-D domain. It
was found that the swarm can find the optimum despite long time delays in the network
communications.
An unexpected result that was obtained is that the robots trajectories exhibit anom-
alous diffusion, performing long distance Levy flights along straight lines, followed by
sticking random walks in a limited area of the domain, especially when the motion of
the swarm starts converging to the location of the optimum.
References
1. DeSousa, J., Pereira, F.: On coordinated control strategies for networked dynamic control
systems: an application to auvs. In: Proceedings of the 15th International Symposium of
Mathematical Theory of Networks and Systems. (2002)

2. Sperazon, A.: On Control Under Com-munication Constraints in Autonomous Multi-Robot
Systems. Licentiate Thesis, KTH Signals, Sensors and Systems, Royal Institute of Technol-
ogy, Stockholm, Sweden (2004)
3. J. Silva, A. Speranzon, J.D., Johansson, K.: Hierarchical search strategy for a team of au-
tonomous vehicles. In: IFAC. (2004)
4. E. Burian, D. Yoerger, A.B., Singh, H.: Gradient search with autonomous under-water vehi-
cles using scalar measurements. In: IEEE Symposium on Autonomous Underwater Vehicle
Technology, IEEE (1996)
5. Bachmayer, R., Leonard, N.: Vehicle networks for gradient descent in a sampled environ-
ment. In: Proceedings of the 41st IEEE Conference on Decision and Control, IEEE (2002)
6. E. Bonabeau, M.D., Theraulaz, G.: Swarm Intelligence, From Natural to Artificial Systems.
Santa Fe Institute in the Sciences of Complexity, Oxford University Press, New York (1999)
7. M. Dorigo, G.D., Gambardella, L.: Ant algorithms for discrete optimization. In: Artificial
Life, Vol.5, pp.137-172 (1999)
8. Eberhart, R., Kennedy, J.: A new optimizer using particle swarm theory. In: Proceedings of
the 6th Symposium on Micro Machine and Human Science, IEEE Service Center (1995)
9. J. Kennedy, R.E., Shi, Y.: Swarm Intelligence. Morgan Kaufman Publishers, San Francisco
(2001)
10. Parsopoulos, K., Vrahatis, M.: Recent approaches to global optimization problems through
particle swarm optimization. In: Natural Computing, Vol.1, pp.235-306, 2002. (2002)
11. T.H. Solomon, E.W., Swinney, H.: Observation of anomalous diffusion and levy flights in a
two-dimensional rotating flow. In: Physical Review Letters, Vol.71, p.3975, APS (1993)
12. T.H. Solomon, E.W., Swinney, H.: Chaotic advection in a two-dimensional flow: Levy flights
and anomalous diffusion. In: Physica D, 76,pp.70-84. (1994)
13. E.R. Weeks, J.U., Swinney, H.: Anomalous diffusion in asymmetric random walks with a
quasi-geostrophic flow example. In: Physica D, 97, pp.291-310. (1996)
14. Weeks, E., Swinney, H.: Anomalous diffusion resulting from strongly asymmetric random
walks. In: Physical Review E, 57, 5, pp.4915-4920, APS (1998)
15. M.F. Schlesinger, G.Z., (eds), U.F.: Levy Flights and Related Topics in Physics. Springer-
Verlag, Berlin (1995)
