
A Hybrid Evolutionary Probablistic Framework for
Developing Robotic Team Behaviors
Edward Newett
1
and Ashraf Saad
2
1
Georgia Institute of Technology, School of Electrical and Computer Engineering
Atlanta, Georgia 30332, USA
2
Georgia Institute of Technology, School of Electrical and Computer Engineering
Savannah, Georgia 31407, USA
Abstract. One of the inherent issues in team-based multiagent robotics is coordi-
nating a cooperative task decomposition. Use of explicit communication models
or game theoretic approaches to model teammate behaviors can be costly and
error-prone. This paper describes a method of discovering a set of behaviors that
allows a team to intrisically function in a collaborative manner. Probabilistic plan-
ners based on spreading activation networks that determine these behaviors are
implemented in each robot. A genetic algorithm is used to find the appropriate
link strengths within each of these networks to produce an overall dynamic team.
It is shown that a team controlled by spreading activation networks can perform
well as a team by maintaining these behaviors in environmental situations other
than the one used for GA evolution. From this framework, a goal-directed task
planning approach can be envisioned to deploy a fully functional robot team.
1 Introduction
Many applications in robotics focus on the design of a single agent capable of solving a
complex problem. However, certain domains may be better suited for a team of robots.
There are several reasons common to various scenarios in which multiple robots may
be better than one [1]. Multiple robots are capable of being in several places at the same
time and can perform distributed action in parallel. A team can coordinate the decom-
position of a problem by effectively breaking it down into multiple subproblems. In a
task like exploration or foraging, multiple robots can learn the environment and explore
more of it in less time than a single robot. Finally, multiple robots can be designed to
be less complex than a single robot given the same task.
One way of producing a cooperative relationship between team members is by as-
signing a specific goal to each member. This method likely requires an explicit decom-
position of the task the agents are collaborating upon. In some tasks, a team of robots
may not be capable of explicitly communicating this decomposition with one another,
either because of communication issues or due to the complexity of the problem includ-
ing robot interference.
Newett E. and Saad A. (2005).
A Hybrid Evolutionary Probablistic Framework for Developing Robotic Team Behaviors.
In Proceedings of the 1st International Workshop on Multi-Agent Robotic Systems, pages 88-101
DOI: 10.5220/0001196500880101
Copyright
c
SciTePress

It is desirable to show that if each team member instead exhibits a certain behavior
conducive to solving a certain part of a problem, and the entire team consists of be-
haviors that mutually complement each other, then the agents can collectively solve the
problem without being assigned explicit subgoals.
This paper focuses on designing a framework to develop the behaviors of individual
robots that comprise the team by developing a Bayesian network within each robot
that captures the correlation between actions of the robot and the observed state of the
environment. These behaviors are generated through a probabilistic planner within each
robot. The probabilistic planner is implemented as a spreading activation network over
the Bayesian network, such that condition-action-effect success likelihoods are based
on what is known about the current state of the environment. Each planner will have
different link strengths between an action and its relation to an environmental condition,
and the goal is to develop the link strengths of each planner so as to produce an overall
desirable team behavior.
In order to demonstrate this conceptual framework, an experimental simulation test-
bed is built comprising several robots dispersed in a field containing a certain number
of light sources. The goal is to locate as many light sources as a possible within a pre-
specified amount of time. This specific task is better suited for a team of robots since
the area to be covered can be divided and explored more quickly by the whole team.
The problem of effectively coordinating team behavior involves subproblems such as
minimizing robot interference and overlap of work between robots.
A fundamental issue then arises: how are the link strengths of the spreading ac-
tivation network determined for each robot? The large search space of potential link
values for each robot, and for the team as a whole, makes it prohibitive from a com-
putational standpoint to perform an exhaustive search. Therefore, a search based on
genetic algorithms (GA) is employed. The GA searches for collective action sequences
to produce collective team behaviors that maximize exploration and localization of light
sources. From the evolved team, condition-action vectors experienced during simula-
tion are recorded and used to seed the link strengths between actions and possible effects
within the spreading activation networks. Each team member should experience a dif-
ferent section of the environment for effective decomposition of the task at hand, and
the corresponding condition-action vectors are then captured to yield the desired team
behavior.
2 Background Work
The majority of the spreading activation task planner design is based on a probabilistic
planner developed by a team at Vanderbilt University [2]. A layered control architecture
is designed based on work related to the DAC5 control system [3] used in a similar
foraging task. Many design choices were made when developing this particular multi-
agent system, each with their own tradeoffs [4]. A few of these tradeoffs are identified
and examined next.

2.1 Team Learning Versus Concurrent Learning
In some cases, team learning refers to an implementation that involves a single, central
learner. On the other hand, in concurrent learning, learning occurs in each robot. In this
case, learning is distributed as tends to be the case in many real environments where
learning takes place online; i.e., while the robots are operating. This case enables robots
to learn separate tasks or subtasks.
In this work, a GA is used where genes comprise the action sequence used by each
robot during simulation. The performance of each robot is evaluated by the fitness func-
tion. The population of genes is broken down so that a separate subpopulation of genes
is dedicated to evolve the action sequence for a given robot.
2.2 Evolving a Team to Solve a Common Problem
Using an evolutionary technique, such as GAs, depends on defining a fitness function.
The task of evolving robots for exploration as opposed to locating an item is primar-
ily specified in the GA through the fitness function. Once a framework is set up for
multiple agents to learn a specific task, the desired performance can be altered to an-
other task by changing the fitness function. Given a common fitness function with the
proper constraints, a GA will search for a team that naturally decomposes a problem
into subproblems.
3 Forming Effective Teams: A Hybrid Approach
SUBPOPULAT ION
GA POPULATI ON
TEAM SELECTION
SIMULATION
FITNESS EVALUATION
Store Team Fitness
Store AC Vectors
Retrieve AC vectors
from best team
BUILD PROBABILITIES
INITIALIZE SA NETWORKS
SIMULATION WITH SA
Done?
No
Yes
Choose Genes
Repeat n time steps
Fig.1. Block diagram of the hybrid approach.
Figure 1 outlines the major steps of the framework designed in this work. Initially, a
genetic algorithm is used to search for collective action sequences that maximize team
performance. This involves repeating the steps of team selection, simulation, and fitness
evaluation until an appropriate team is identified. The action-condition vectors and team

fitness values are stored for each generation, and following evolution, the vectors which
represent the best evolved team are used to build probabilities (represented by link
strengths) within each spreading activation network.
These link strengths distinguish behaviors among the robots as all other aspects of
the spreading activation networks are identical between robots, along with designer-
specified goals. Once the spreading activation networks are initialized, each robot is
controlled through a reactive and adaptive layered approach.
3.1 Employing a Genetic Algorithm
Producing good overall team performance depends on determining the link weights
of the spreading activation network for each robot. Given the large search space for
potential values, a GA was chosen as the search mechanism. Although a GA could be
used directly to find these link strengths, the approach taken is to use the GA to evolve
the action sequences of the team. Searching for action sequences is likely a more direct
and time efficient search since the genes of the GA consist only of n possible actions.
The link strengths are encoded in the genotypes of the GA using real values ranging
between [-1 and 1]. Therefore, with a small and static set of possible values for each
allele, convergence times could be drastically reduced. To further reduce the search
complexity, genes are divided into subpopulations, with each subpopulation maintained
for a separate robot.
3.2 Using GA Subpopulations
In general, by partioning a population of genes into subpopulations, a variety of new
possibilities emerge. If each individual of a subpopulation is only mated with another
member of the same subpopulation, then the structures between subpopulations can
vary. This gives rise to different species of genes and allows for a simple way to keep
track of which individuals can pair with which others during crossover. Other methods
of maintaining species include assigning an innovation number [5], which would allow
for multiple species to coexist within a subpopulation. Subpopulations are mainly used
in this experiment to allow each robot to develop a different behavior and to allow the
decomposition of the problem. Each robot is assigned a specific subpopulation through-
out the evolution process. In this way, the subpopulations for each robot may converge
towards different subgoals, resulting in the desired implicit task decomposition. Within
each subpopulation, individuals are assigned fitness values based on performance dur-
ing simulations. Additionally, a team fitness value is maintained for every group of
individuals used together in each simulation run. This team fitness value is used to pro-
duce cooperative behavior: a combination of individuals that perform well together by
exhibiting task decomposition is given a higher team fitness value.
3.3 Spreading Activation Networks
A spreading activation network as used in this work is a connectionist type network in
which layers of nodes represent either possible actions or possible states of the envi-
ronment as perceived via the robot sensors. Spreading activation is attractive because

it allows for efficient search potentially in parallel and in a fashion that happens to be
analogous to human information processing [6].
The behaviors of team members are determined by the weights of links that connect
layers of the spreading activation networks. Figure 4 shows a portion of a spreading
activation network such as those used in the experiments. The weights between pre-
conditions (the value of conditions observable in the current state of the environment)
and actions, as well as between actions and post-conditions (in the next state) can be
defined differently for each member of the team. These weights determine how each
robot will make decisions: if the resulting probability of a certain action sequence being
successful in bringing a robot to a goal condition is higher for one robot, it may perform
this sequence where another robot in the same state would not.
3.4 Probabilistic Task Planning
Goal-oriented planning techniques are utilized that involve back propagation of goal
utilities, forward propagation of condition utilities, and action selection as previously
developed in [2]. In particular, when the adaptive control layer is active (indicating
no direct rewards), planning is performed until one of the actions in the current state
accumulates enough utility and is selected. Action utilities are typically compared to a
threshold value, and when an action exceeds this threshold, it is selected.
Figure 4 shows a portion of the spreading activation network. The first layer consists
of conditions observed in the environment, or the preconditions present before acting.
These preconditions are linked to possible actions the robot may perform, and the con-
nections indicate the likelihood of an action succeeding given the state. These links,
denoted w
ij
, are determined by the following equations [2]:
w
ij
=
(
> 0 if (c
i
= T) increases P(a
success
j
)
< 0 if (c
i
= T) decreases P(a
success
j
)
(1)
where T indicates a true condition and F a false condition. The link strength w
jk
between an action a
j
and one of its effect propositions c
k
is defined as follows:
w
jk
=
(
P (c
k
= T|a
exec
j
) if a
j
sets (c
k
= T)
−P (c
k
= F|a
exec
j
) if a
j
sets (c
k
= F)
(2)
During backpropagation, action utilities are then updated to determine the best ac-
tion to take. First goal utilities U(c
k
) are examined:
U(c
k
) =
> 0 if (c
k
= T) ∈ G
< 0 if (c
k
= F) ∈ G
= 0 if c
k
/∈ G
(3)
Then the utility of condition c
k
is combined with the probability of the condition
existing in the current state of the environment and action-effect link strengths to deter-
mine the reward of performing an action a
j
:
R(a
j
|c
k
) =
(
w
jk
P (c
k
= F|S
t
)U(c
k
) if(w
jk
> 0)
w
jk
P (c
k
= T|S
t
)U(c
k
) if(w
jk
< 0)
(4)

These action rewards are summed over all conditions defining the action utility for
action a
j
:
U(a
j
|S
t
) = −C(a
j
) +
X
k
P (a
success
j
|S
t
)R(a
j
|c
k
) (5)
3.5 Extracting Action-Condition Vectors
The action sequences that represent the best team are extracted from the GA and paired
with the condition vectors recorded during the simulation of that team. For every action
in the sequence, the condition vector contains the corresponding environmental condi-
tions present. The link strengths between actions and effects of the spreading activation
networks are seeded with these action-condition pairs by evaluating the distribution of
conditions that occured after every action. A link strength w
jk
is then determined by
the frequency of an effect proposition being true after an action was executed over n
simulation steps:
w
jk
=
1
n
X
n
(
+1 if (c
k
= true|a
exec
j
)
−1 if (c
k
= false|a
exec
j
)
(6)
Frequency is incremented for every condition c
k
that is true after action a
j
is ex-
ecuted. If c
k
is false after action a
j
is executed, the frenquency count is decremented.
This method effectively correlates actions with effects as they tend to appear in the ob-
served environment. If an action a
j
results in equally frequent occurrences of c
k
being
true and false, w
jk
will accumulate to zero, indicating no relationship.
3.6 Switching Between Reactive Control and Planning
WORLD
Actuators
Sensors
+
Goal conditions
Layer
Selection
Fig.2. Block diagram of the control system. The reac-
tive layer is activated whenever the sensors return val-
ues that pass a threshold and indicate a goal condition.
Reactive control takes over
Fig.3. A scenario demonstrating a
switch between adaptive and reac-
tive control.
To improve individual performance, a distributed control model was then developed
which incorporates a two-layered approach: a reactive control layer is used in situations

where a sensor stimuli indicates a direct reward (either positive or negative), and an
adaptive control layer is used where no direct reward is observable from the sensors
thus requiring planning (see Figure 2). The reactive control layer equips the robot with
minimal behavioral competence to deal with its environment and is only active when
a target (light source) or collision condition are certain to occur if the robot does not
react. Figure 3 shows an example of a robot that is exploring towards the north-east
while a wall is sensed on the right. Also shown is how the reactive control layer takes
over as soon as a direct reward is observable (here the light sensors have discovered a
light source and the robot turns towards it). The amount of planning at any time during
execution varies depending on how many action-condition steps need to be evaluated to
achieve a high enough action utility for an action at the current step, which is discussed
further in section 4.
4 Implementation
A Khepera robot simulator is used in this work as described below. The task given is
to localize as many light sources as possible in a prespecified amount of time, which
should be solved best by a team that works together by dividing up the map between
robots to cover the largest possible area. Initially, action sequences are evolved to find
an optimal team as defined by the set of action sequences. Then, control is transferred
to spreading activation networks and performance is qualitatively evaluated.
Three types of sensors are incorporated into the conditions layer of the spreading
activation network: 8 light sensors, 8 distance sensors, and a compass. Each of these
types is divided so as to produce four Boolean conditions for each type. For the light and
distance sensors, threshold values are used to specify whether a wall (light) is detected
directly in front, to the left, to the right, or behind the robot. The compass is used
to record roughly which of the eight cardinal directions the robot is facing. Figure 4
indicates these conditions in the preconditions and effects layers of the network.
Go_Forward
Turn_Left
Turn_Right
Wall_Forward
Wall_Left
Wall_Right
Wall_Behind
Facing_North
Facing_East
Current State
Wall_Forward
Wall_Left
Wall_Right
Wall_Behind
Facing_North
Facing_East
Next State
Wij
Wjk
Fig.4. Portion of the spreading activation network.

The actions a robot may perform are limited to forward movement, turning left, or
turning right. An action period is defined so that the robot does not attempt to plan at
each time step (since very little would have changed in the environment). Between each
action period, the robot examines its current state received from the sensors, and if no
direct reward is in the state it will plan. Once a decision is made, an action is performed
for action period time steps, and the sensors are examined for direct rewards and other-
wise planning begins again. This allows the robot to choose the optimal decision based
on known probabilities at each action period.
4.1 Simulator
The experiment makes use of a freely available Khepera simulator written in C [7].
The simulator evolved into a higher level and more general program called Webots (not
a freeware) that allows for more sophisticated simulations on a number of robots and
platforms.
An alternative Khepera simulator, KiKS [8], was also considered. KiKS is Matlab-
based and provides a smoother interface and multiple robot support via a network
client/server implementation. However, for the purpose of implementing GAs, this sim-
ulator may be less suitable. The fastest simulation run of a single robot that was achieved
with visualization turned off was 2000% the speed of the Khepera being simulated, with
a simulation of 200 steps taking a matter of seconds. Since a typical GA evolution can
involve thousands of simulation runs, this severely impacts the degree to which the net-
works could be feasibly evolved. Additionally, since multi robot support is currently
network-based, evolution of multiple robots seems even less suited to this simulator.
The lightweight C simulator can be run orders of magnitude faster than KiKS, and this
ultimately led to selecting it as the simulator for the experiments we conducted.
Fig.5. The C-based Khepera simulator and
environment used. The team of three robots
begin in the lefthand section of the map.
Table 1. Parameters for genetic algorithm
Parameter Value
Gene size (action sequence length) 140
Subpopulation size 7
Number of subpopulations 3
Max generations 30
Elitist genes per generation 1
Crossover rate 0.9
Mutation rate 0.05

4.2 The Evolutionary Process
The GA was implemented with parameters as shown in Table 1. One subpopulation is
assigned permanently to each robot, which consists of 7 action sequence genes. Initially,
all gene alleles are assigned one of three action values: FORWARD, TURN
LEFT,
and TURN
RIGHT are the possibilities with FORWARD being 80% as likely as the
other two. At each stage of evolution the genes are evaluated, and the gene with the
highest fitness value is flagged as the ’best’ of the subpopulation. These best genes are
copied directly to the next generation. This method of elitism ensures that individuals
with very high fitness are not lost through further evolution. The rest of the genes are
then sequentially processed. For each gene, there is a 5% chance of mutation, and if
mutation takes place then 5% of the gene is assigned a random action. If the gene is not
mutated, then it undergoes crossover with a random individual from the subpopulation.
Crossover takes place uniformly at one random point where the action sequence values
are swapped between the two individuals.
4.3 Evaluating Fitness
The map on which the experiment took place has dimensions 1000.0 by 1000.0 and is
shown in Figure 5. The map was partioned into 100x100 equal sized sections. During
a simulated run, the path of each robot is tracked, and the number of sections traversed
is tallied. Along with this exploration fitness, the number of light sources each robot
encounters is recorded. The fitness function assigned to each action sequence gene is as
follows:
F
i
= s
i
+ (500l
i
) (7)
F (n) =
X
i∈n
(F
i
+ 100l
i
) (8)
where in (7), s
i
indicates the number of unique sections of the map member i explored
and l
i
refers to the number of different light sources discovered with this action se-
quence. The fitness function assesses a combination of the team and individual fitnesses.
A majority of weight is placed on individual fitness, but members are also rewarded for
working well with others: the team members in the combination set n in (8) the fit-
ness values from (7) are summed, and extra reward is assigned for the number of light
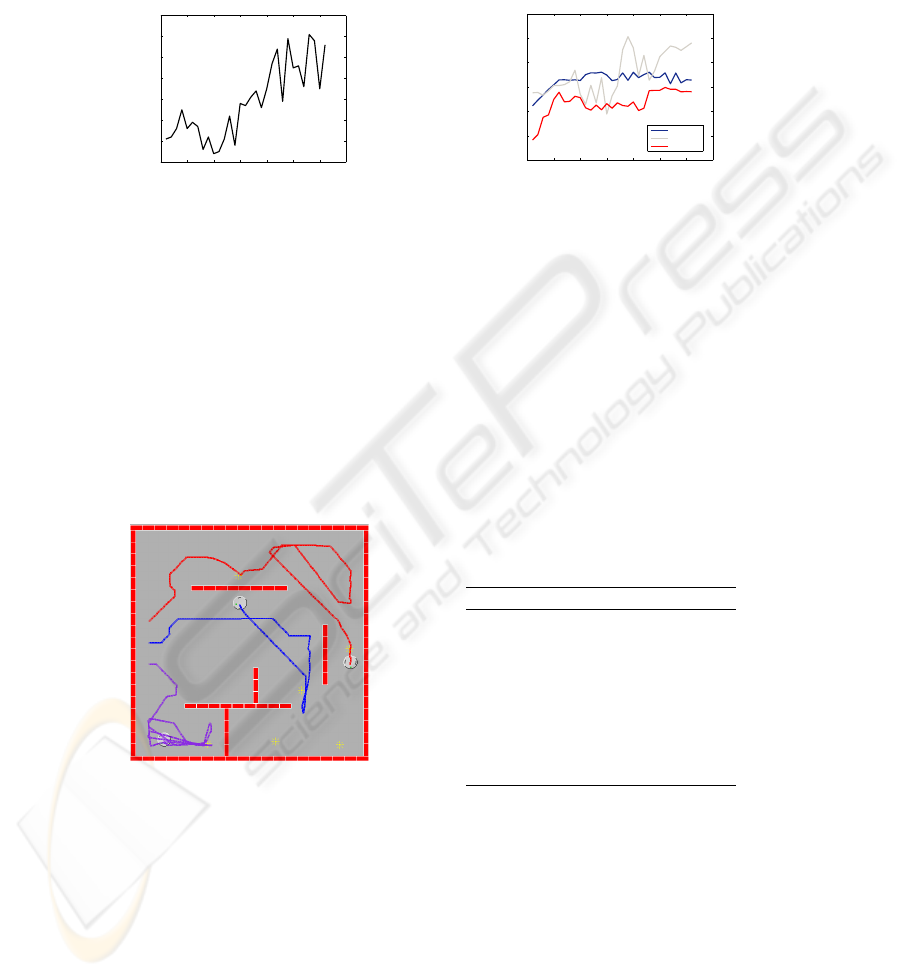
sources the entire team discovered. Figure 6 shows the typical performance results of
the GA in a plot of best team fitnesses achieved over 30 generations. Figure 7 shows the
average fitnesses of each subpopulation along with the fitnesses of the best members.
A typical resulting best team performance simulation is shown in Figure 8. In this
simulation, each of the three robots explores a separate major section of the map. Each
of the three robots begins in the same initial position each simulation run with all three
robots in the center of the board side by side. Every member of every subpopulation
is run against every member of every other subpopulation. This increases the search
space significantly, which is one of the reasons a smal subpopulation size and only
three robots were used. At the end of each run, the genes are assigned individual fitness
values and the team of genes is given a team fitness value.
0 5 10 15 20 25 30 35
890
900
910
920
930
940
950
960
Generation
Team fitness
Fig.6. Best team fitness values over genera-
tions.
0 5 10 15 20 25 30 35
2
2.5
3
3.5
4
4.5
5
x 10
4
Generation
Fitness
Population 1
Population 2
Population 3
Fig.7. Individual Fitness values of best mem-
bers of each generation.
Fig.8. Paths of an evolved team. Each mem-
ber of the team explores a separate section of
the map.
Table 2. Rewards for Environmental Goal
Conditions
Goal Condition Reward Value
Wall in front of robot -10
Wall left of robot 5
Wall right of robot 5
Wall behind robot 10
Light in front of robot 30
Light left of robot 20
Light right of robot 20
Light behind robot 20

4.4 Simulating Team Behaviors
The spreading activation networks are then initialized. Each network consists of three
layers. The preconditions layer is initialized with propositions as observed in the cur-
rent state of the environment. The effect (or postconditional) layer consists of reward
values for each condition being present in the goal state, which then determine action
utility as in (3). Table 2 shows the reward values assigned to each condition. A negative
reward implies that the condition is undesirable, which is the case with a wall in front
of the robot. With negative rewards, the robot will plan against adverse environmental
conditions: for instance, if it is likely that a wall will be observable in front of the robot
after performing an action, that action’s utility is lessened. Also, by assigning positive
rewards to having a wall on the left or right of the robot (as is the case in Table 2) will
result in a wall following behavior.
Table 2 does not include rewards given for each specific orientation. Assigning a
higher reward to facing north and east, for instance, would result in robots that tend
to explore towards the northeast. However, since these rewards are common to all ro-
bots, it is undesirable to hardcode behaviors in this way. Instead, the link strengths
between these orientation conditions and each action, which are unique for each robot,
will provide these behaviors. These orientation reward values must be balanced with
other utilities, such as wall conditions, otherwise the robot may prefer to face a wall as
long as it is oriented in the preferred direction. Also, these orientation rewards should
not be hardcoded to zero, or robots will be unable to develop behaviors based on these
conditions.
In selecting actions there is often the possibility that no action seems desirable, or
all actions seem equally desirable. In these situations the robot may continue planning
indefinitely. To keep this from occuring, the forward propagation lookahead is limited to
a value assigned at design time. The value chosen for the experiments was 4 lookahead
states. In the case that no conditions are present in the environment to make any of the
possible actions desirable (i.e. all action utilities are zero), the default action is to move
forward. This is rarely needed when the orientation conditions can themselves cause an
action to be desirable, which is further discussed in the next section.
4.5 Applying Evolved Team Actions to Spreading Activation
Next, the action sequences and corresponding condition vectors of the best team simu-
lation run from the GA evolution are used to initialize the link strengths of the spreading
activation networks. A portion of these link strengths are shown in Figure 9. Since these
link strengths are limited directly to the experience of the particular run corresponding
to the GA simulation, they are heavily biased to that particular run and are not guaran-
teed to necessarily represent the environment accurately. However, the biasing results in
each robot exhibiting a different behavior based on how they perceive the environment.
It is through this biasing that behaviors are developed.
Figure 10 shows a resulting simulation of 2000 time steps, or equivalently twice the
length of action sequences used in the GA simulations. Heterogeneous robot behaviors
are apparent from the figure. The path of robot #2, indicated in blue, is the least produc-
tive, but exhibits wall-following around the perimeter of the map. Robot 1, with a path

Go_Forward
Turn_Left
Turn_Right
Wall_Forward
Wall_Left
Next State
Robot # Link Strength
1 Forward->Wall_Forward 0.74
1 Forward->Wall_Left 0.68
1 Turn_Left->Wall_Forward 0.08
1 Turn_Left->Wall_Left 0.10
2 Forward->Wall_Forward 0.64
2 Forward->Wall_Left 0.05
2 Turn_Left->Wall_Forward 0.48
2 Turn_Left->Wall_Left 0.05
3 Forward->Wall_Forward 0.68
3 Forward->Wall_Left 0.10
3 Turn_Left->Wall_Forward 0.48
3 Turn_Left->Wall_Left 0.06
Fig.9. A portion of the link strengths in resulting spreading activation networks. Link strengths
for turning left if there is a wall forward vary: Robot 1 would turn left and Robot 2 would turn
right.
indicated in red, discovers the most light sources by exhibiting a wall-adverse behavior.
The third robot, path indicated in purple, makes its way into the corner but becomes
trapped near that light source.
In Figure 10 it also indicated at what points the robots are being controlled by the
spreading activation networks (adaptive control) and when they are being controlled by
the reactive control layer. When a light source becomes observable by the sensors, the
robot reflexively turns towards it. If the IR distance sensors detect a wall in front-left
or front-right of the robot, the robot will turn reflexively in the direction opposite to the
wall to avoid a collision.
Figure 11 demonstrates a second simulation result. This time the robots were started
in a different area of the map than where they were trained through the GA simulations.
The results are consistent with those as shown in 10: Robot 2 (blue) exhibits wall-
following, robot 1 (red) exhibits wall-adverseness, and robot 3 (purple) stays around
light sources. The consistency of behaviors confirm that the spreading activation net-
works are controlling the actions of the robots for the majority of the time.
5 Discussion
The results from the simulation indicate that behaviors can be successfully defined by
link strengths within spreading activation networks, and this is a successful framework
for developing such behaviors. These behaviors are more robust than the action se-
quences evolved by the GA, since the robots can be initialized in different areas (or
different maps) and their performance will remain about the same.
It should be noted that the robots did not perform as well as teams when controlled
by the spreading activation networks as compared to the evolved GA sequences, but
some task decomposition was still present. By exhibiting different behavioral roles,
like wall-following versus wall-adverseness, a team of mobile robots is able to explore
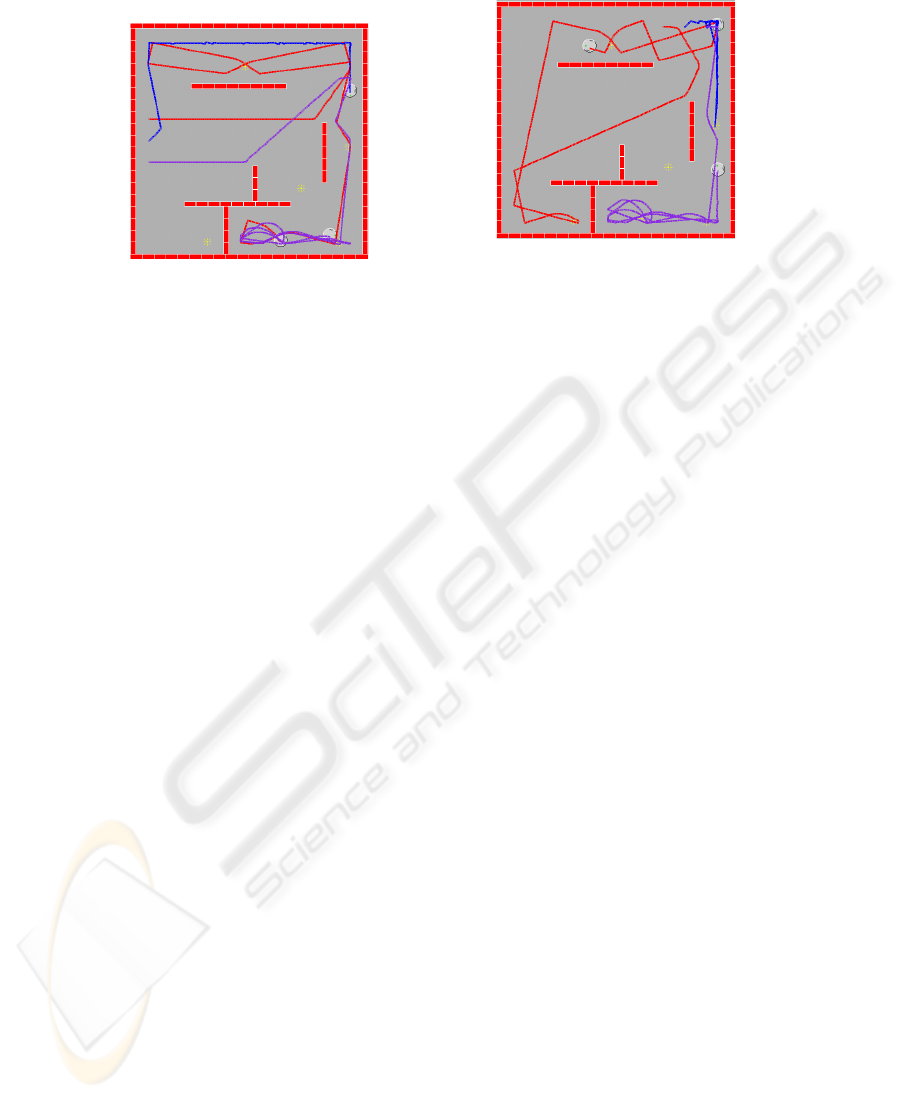
Fig.10. Paths achieved in the same environ-
ment by a team controlled by spreading acti-
vation networks and reactive control.
Fig.11. Paths achieved by starting the robots
in another part of the environment using the
same network link strengths.
more features of any environment. This environmental independence is probably the
most useful result of this experiment.
Reactive control was introduced into the framework design for the purposes of
speeding up GA evolution. Without reactive control, the action sequences produced
would often result in robots running against walls for time segments and hindered over-
all progress. Reactive control, however, adds a bit of additional uncertainty into the
design of action sequences. Robots may be reacting to a wall or to another robot in the
same way. This is ultimately a sensory issue and remains to be addressed.
The GA succeeded in this experiment in decomposing the task of maximizing ex-
ploration between members of the team. Since the problem of optimizing cooperative
team search behavior appears to be NP-hard, it was well suited for a GA search. By
tweaking the actual fitness functions (7) and (8) this decomposition could be manipu-
lated. After most evolutions achieved during the simulations, there was one robot which
evolved better than the others. This robot may have in a way hindered the evolution of
other robots when team fitness was evaluated. Since this action sequence achieved a
high fitness value, it was not as imperative that the other action sequences present in
this particular simulation be as fit in order to survive. By adjusting the team and indi-
vidual fitness functions appropriately, convergence of best team fitness values should
be possible.
The idea behind mapping the action-condition vectors to link strengths of spread-
ing activation networks can be compared to other behavior-based techniques. It is be-
lieved that defining these link strengths based on the performance of only one simula-
tion may not have provided adequate information for creating a robust decision-making
framework. One way of remedying this problem is to increase the length of the ac-
tion sequences that make up the GA genes but with the cost of greater computation
time in performing evolution. Another way would be to evolve the genes until each
subpopulation converges to almost the same action sequences. Then, using all of the
genes from each subpopulation in creating link strengths of the spreading activation

networks would provide more of an aggregated representation of the appropriate action
sequences.
The framework developed to this point only addresses the first portion of what
would be required to deploy a team of goal-directed robots. The latter portion requires
supplementing this framework with a full, goal-directed task planner. This addition to
the framework would need to incorporate a memory system augmented in each robot
to allow task and environment tracking. The behaviors that the robots have developed
would still dominate decision making, but decisions on where to explore next would
also be more influenced by where the robot has already been.
6 Conclusions
Spreading activation is an effective means of defining planning behavior for a team of
robots. Once the spreading activation networks have been initialized, the robots will ex-
hibit these behaviors independent of their place in the environment or the environment
itself. However, the method of using GA evolution to find link strengths for the spread-
ing activation network of each robot requires some centralized method of evaluating
team fitness.
References
1. Arkin, R., Balch, T.: Cooperative multiagent robotic systems (1998)
2. Bagchi, S., Biswas, G., Kawamura, K.: Task planning under uncertainty using a spreading
activation network. IEEE Transactions on Systems, Man, and Cybernetics, Part A 30 (2000)
639–650
3. Verschure, P.F.M.J., Althaus, P.: A real-world rational agent: unifying old and new ai. Cogni-
tive Science 27 (2003) 561–590
4. Panait, L., Luke, S.: Cooperative multi-agent learning: The state of the art. Technical Re-
port GMU-CS-TR-2003-1, Department of Computer Science, George Mason University, 4400
University Drive MS 4A5, Fairfax, VA 22030-4444 USA (2003)
5. Stanley, K.O., Miikkulainen, R.: Evolving neural network through augmenting topologies.
Evolutionary Computation 10 (2002) 99–127
6. Kortenkamp, D., Chown, E.: A directional spreading activation network for mobile robot
navigation. In: Proceedings of the second international conference on From animals to animats
2 : simulation of adaptive behavior, Cambridge, MA, USA, MIT Press (1993) 218–224
7. Michel, O.: Khepera Simulator version 2.0. User Manual. (1996) Originally downloaded from
http://www.i3s.unice.fr/.
8. Nilsson, T.: Kiks is a khepera simulator. Master’s thesis, Ume University (2001)
