
SECRET LOCKING: EXPLORING NEW APPROACHES TO
BIOMETRIC KEY ENCAPSULATION
Seny Kamara
Johns Hopkins University
Department of Computer Science
3400 N Charles Street, Baltimore, MD 21218, USA
Breno de Medeiros
Florida State University
Department of Computer Science
Tallahassee, FL 32306-4530, USA
Susanne Wetzel
Stevens Institute of Technology
Department of Computer Science
Castle Point on Hudson, Hoboken, NJ 07030, USA
Keywords:
Biometrics, secret sharing, secret locking, error-tolerance.
Abstract:
Biometrics play an increasingly important role in the context of access control techniques as they promise to
overcome the problems of forgotten passwords or passwords that can be guessed easily.
In this paper we introduce and provide a formal definition of the notion of secret locking which generalizes
a previously introduced concept for cryptographic key extraction from biometrics. We give details on an
optimized implementation of the scheme which show that its performance allows the system for use in practice.
In addition, we introduce an extended framework to analyze the security of the scheme.
1 INTRODUCTION
Biometrics play an increasingly important role in a
broad range of security applications. In particular,
biometrics have manifold applications in the context
of access control techniques which to date are largely
based on the use of passwords. Biometrics promise
to overcome the problems of forgotten passwords or
passwords that can be guessed easily.
Most biometric systems used in practice to date
store profiles of users. A user profile typically consists
of a collection of measurements of the user’s physi-
cal characteristics (e.g., the user’s iris patterns or fin-
gerprints) obtained during an initial enrollment phase.
Later, when a user presents herself for identifica-
tion, the system performs measurements and matches
those against the database of stored user profiles. If a
“good” match is found, the user is identified. While
these systems protect against an online attacker, they
however, pose a considerable risk for offline attacks in
which an attacker may obtain and exploit the knowl-
edge of the stored profiles.
Recently, the alternative approach of biometric key
encapsulation has been proposed: instead of replac-
ing the use of passwords by means of biometrics,
passwords are “hardened” by incorporating biomet-
ric features. No user profiles are stored in the sys-
tem. Due to the inherent variability in biometric read-
ings, the system, however, requires a biometric fea-
ture extractor in order to reliably recover the same
(cryptographic) key from an imprecise input, i.e., to
provide “error tolerance.” In this context, a solution
based on error-correcting codes and randomness ex-
traction was developed (Juels and Wattenberg, 1999;
Juels and Sudan, 2002; Dodis et al., 2004; Boyen,
2004). An alternative line of work based on secret
sharing techniques was proposed in (Monrose et al.,
2002; Monrose et al., 2001). While the former pro-
vides an information-theoretical optimal solution for
error-tolerance, it at the same time requires a uniform
level of error-tolerance for all users alike and as such
poses significant challenges for use in practice. In
254
Kamara S., de Medeiros B. and Wetzel S. (2005).
SECRET LOCKING: EXPLORING NEW APPROACHES TO BIOMETRIC KEY ENCAPSULATION.
In Proceedings of the Second International Conference on e-Business and Telecommunication Networks, pages 254-261
DOI: 10.5220/0001408002540261
Copyright
c
SciTePress

contrast, the latter allows for an individual level of
error-tolerance for each user.
In this paper we focus on extending the work in
(Monrose et al., 2002). In particular, we introduce
a formal definition of the notion of secret locking
which generalizes the concept proposed previously.
We furthermore provide an extended discussion on
the determinant-based scheme. We give details on an
optimized implementation of the scheme which show
that its performance allows the system for use in prac-
tice. In addition, we introduce an extended framework
to analyze the security of the scheme. In the original
work, the security of the determinant-based construc-
tion was proved under an idealized attack model only.
In this paper we consider arbitrary attacks. Finally,
we discuss heuristic connections between the security
of the scheme and well-known hard problems in com-
putational mathematics and coding theory.
1.1 Motivation
Using biometrics in practice poses a number of chal-
lenges, in particular when used in applications to pro-
tect resource limited devices such as cell phones or
PDAs. Ideally, these devices should obtain biometric
measurements without requiring any additional ded-
icated hardware. Currently, most portable devices
have built-in microphones, keyboards or writing pads.
As such, systems using biometrics such as voice pat-
terns, keystroke dynamics or stylus drawing patterns
are more readily deployable than systems based on
iris or retina scans. Furthermore, it should be diffi-
cult for an adversary to capture the user’s biometric
measurements, and in particular this counter-indicates
fingerprint scans as a biometric in this regard, as fin-
gerprint marks are quite easy to obtain.
Static vs. Non-static Biometrics. While static bio-
metrics capture physiological characteristics of an in-
dividual (e.g., iris or retina patterns, and fingerprints),
non-static biometrics (e.g., voice patterns, keystroke
dynamics) relate to behavioral characteristics. In gen-
eral, it is harder for an attacker to capture non-static
than static biometrics, so they could prove useful for
the type of application we consider. However, non-
static biometrics have a high variability of robust-
ness from user to user: Some users have more reli-
ably reproducible feature readings than others. Con-
sequently, less error-tolerance is required to support
identification of users with more reliably reproducible
feature readings (Doddington et al., 1998).
Biometric Key Encapsulation requires the exact
reconstruction of the underlying key, and some form
of error-tolerance must therefore be employed in or-
der to accommodate the variability in biometric read-
ings. In order for a system to accommodate different
levels of error-tolerance allowed to identify particu-
lar users, ideally it should allow for variable error-
tolerance. Alternatively, the system-wide level could
be adjusted to the worst case, i.e., the least robust
user. In (Juels and Wattenberg, 1999; Juels and Su-
dan, 2002; Dodis et al., 2004; Boyen, 2004) error-
tolerance is achieved by means of error-correcting
codes and randomness extraction. In practice, this so-
lution either requires uniformity, with the same error-
correcting code employed for all users, or the codes
need to be defined on a user-by-user basis. While the
former solution suffers from the problem that the se-
curity of the system is reduced to the level of the least
robust user, the latter reveals to an attacker the code
used (and therefore the level of error-tolerance sup-
ported) upon inspection.
In contrast, the system introduced by Monrose et
al. allows for non-uniformity of robustness of a user’s
biometric characteristics. In particular, the system
hides the amount of error-tolerance required by a spe-
cific user. In other words, if the attacker has access
to the key encapsulation value, his effort to decide
how much error-tolerance the particular user required
should be roughly equal to the effort of breaking the
key encapsulation of that user.
2 RELATED WORK
There are numerous approaches described in liter-
ature to use biometrics for authentication purposes
or to extract cryptographic secrets from biometrics.
There are various systems using biometric informa-
tion during user login process (e.g., (Joyce and Gupta,
1990)). These schemes are characterized by the fact
that a model is stored in the system (e.g., of user
keystroke behavior). Upon login, the biometric mea-
surements (e.g., user keystroke behavior upon pass-
word entry) are then compared to this model. Since
these models can leak additional information, the ma-
jor drawback of these systems is that they do not pro-
vide increased security against offline attackers.
In (Soutar and Tomko, 1996), a technique is pro-
posed for the generation of a repeatable cryptographic
key from a fingerprint using optical computing and
image processing techniques. In (Ellison et al., 2000),
cryptographic keys are generated based on users’ an-
swers to a set of questions; subsequently, this sys-
tem was shown to be insecure (Bleichenbacher and
Nguyen, 2000). Davida, Frankel, and Matt (Davida
et al., 1998) propose a scheme which makes use of
error-correction and one-way hash functions. The for-
mer allows the system to tolerate a limited number of
errors in the biometric reading. This approach was
generalized and improved in (Juels and Wattenberg,
SECRET LOCKING: EXPLORING NEW APPROACHES TO BIOMETRIC KEY ENCAPSULATION
255

1999) by modifying the use of error-correcting codes.
In (Monrose et al., 2002; Monrose et al., 2001),
a new approach is proposed, focusing on using key-
stroke features and voice characteristics to harden the
passwords themselves. The work improves on previ-
ous schemes in that it is the first to offer better se-
curity against a stronger attacker. Furthermore, this
approach allows a user to reconstruct the key even if
she is inconsistent on a majority of her features. The
techniques introduced by (Ellison et al., 2000; Davida
et al., 1998; Juels and Wattenberg, 1999) respectively,
do not permit that.
Recently, a new theoretical model for extracting
biometric secrets has been developed (Juels and Su-
dan, 2002; Dodis et al., 2004; Boyen, 2004), extend-
ing the work in (Juels and Wattenberg, 1999). The
model is based on the use of population-wide met-
rics combined with (optimal) error-correction strate-
gies. While the model is provably secure and allows
for optimal constructions under certain assumptions,
it has not been empirically validated that these con-
structions are applicable to biometrics of interest in
practice.
3 SECRET LOCKING AND
SECRET SHARING SCHEMES
In the traditional setting, a secret sharing scheme
consists of a dealer, a set of participants P =
{P
1
, . . . , P
n
}, an access structure Γ ⊆ 2
P
as well
as algorithms Share and Recover. In order to share
a secret s amongst the participants, the dealer uses
the algorithm Share to compute each share s
i
to send
to user P
i
. In order to reconstruct the shared se-
cret using the algorithm Recover, only those shares
are needed which correspond to authorized subsets
of participants —i.e., shares corresponding to sets in
the access structure Γ. The most well-known secret
sharing schemes are threshold schemes. While these
schemes have a simple access structure (which con-
tains all user sets of cardinality larger than a threshold
t, i.e., S ∈ Γ ⇐⇒ |S| > t), for use with biomet-
rics, we are interested in secret sharing schemes with
different properties.
The concept of a compartmented access structure
was introduced in (Simmons, 1990), and has re-
ceived attention from a number of researchers (Brick-
ell, 1989; Ghodosi et al., 1998). In a compartmented
secret sharing scheme, each user P
i
is assigned a level
ℓ(P
i
). The same level may be assigned to different
users. In order to reconstruct the secret, one share
from each level is needed. More formally, the ac-
cess structure of the compartmented secret sharing
scheme is Γ = {A ∈ 2
P
: A ∩ P
i
6= ∅}, where
P
i
= {P
j
∈ P : ℓ(P
j
) = i}.
Compartmented access structures can be used to
achieve error-tolerance in biometric key encapsula-
tion: Let φ = (φ
i
)
i=1,...,m
be the set of discretized
measurements
1
of biometric features (for instance
timing intervals between different keystrokes). Each
φ
i
assumes a value in the same finite set D. For
each user U , let R
i
(U) ⊂ D be the range of val-
ues that are likely
2
to be observed by measuring φ
i
on user U. In order to encapsulate a key u for user U,
where the key is a random value from a finite field F
q
,
proceed as follows. First, define a virtual participant
set P = {P
i,j
}
{i=1,...,m;j∈D}
, and assign to P
i,j
a
level ℓ(P
i,j
) = i. Next, use the Share algorithm for
the compartmented access structure to compute initial
shares s
′
i,j
. Finally, perturb this initial set of shares to
obtain shares s
i,j
which match the initial shares s
′
i,j
whenever j ∈ R
i
(U), and are set to a newly chosen
random share value otherwise. When the legitimate
user U presents herself for authentication, it is suffi-
cient to measure each value φ
i
(U) ∈ D of the biomet-
ric feature φ
i
on user U, then select the share s
i,φ
i
(U)
from level i and apply the Recover algorithm. By
construction, the outcome is likely to be the encap-
sulated secret u. On the other hand, the same is not
likely to be the case if a different user U
′
tries to im-
personate U, as the feature values for U
′
are not likely
to align (i.e., fall in the likely range at each level) with
those of U.
The above idea can be readily applied with any ef-
ficient compartmented secret sharing scheme, such
as that in (Ghodosi et al., 1998), if the target is
simply user authentication. However, as we seek
mechanisms to achieve secure key encapsulation, the
scheme must moreover have the property that an at-
tacker who has access to the set of all shares cannot
determine which shares to pick at each level. It can be
readily seen that the scheme in (Ghodosi et al., 1998)
is not secure in this sense, and therefore is not suffi-
cient for our purposes.
We can abstract the previously introduced concepts
as follows: Let D be a finite set, and consider the
product set D
m
. We call an element (φ
i
)
i=1,...,m
∈
D
m
a sequence of feature values. Consider some uni-
verse U, and for each element U of the universe, and
for each feature value φ
i
we associate the likely range,
a subset R
i
(U) ⊂ D. Let ρ
i
= R
i
(U)/D be the rel-
ative size of the likely range R
i
(U). Let τ
i
(U) be
defined as − log(ρ
i
), which equals the logarithm of
1
Biometric measurements are continuous values. Mea-
surements are discretized by breaking the range of the mea-
surement into equal probability ranges.
2
One needs repeated measurements of each biometric
feature in order to arrive at the range of likely values. Par-
ticularly with non-static biometrics this range may vary over
time. Refer to (Monrose et al., 2002) for details of a practi-
cal implementation of such a scheme.
ICETE 2005 - SECURITY AND RELIABILITY IN INFORMATION SYSTEMS AND NETWORKS
256

the expected number of random trials before a value
for φ
i
(U) is chosen within U’s likely range R
i
(U),
among all values in D. Finally, let τ
U
=
P
i
τ
i
(U).
The value τ
U
is the logarithm of the expected num-
ber of random trials before one produces a sequence
of likely features (for U ) by simply choosing random
sequences in D
m
. Clearly, τ
U
is a natural parameter
of the difficulty of guessing likely sequences for U.
Definition 1 A secure secret locking scheme is a set
of algorithms Share and Recover with the following
properties:
1. Given a compartmented participant set P =
{P
i,j
}
{i=1,...,m;j∈D}
, where D is a finite set, and
given a secret s in F
q
, Share produces a collection
s
i,j
of shares (which are values in a set S) which
implement the access structure Γ = {A ∈ 2
P
: A∩
P
i
6= ∅, i = 1, . . . , m}, where P
i
= {P
i,j
}
j∈D
.
In other words, Share and Recover implement a
compartmented secret sharing scheme with levels
i = 1, . . . , m.
2. Assume that a set of shares s
i,j
originally produced
by Share has been perturbed by substituting for
s
i,j
a random element of S whenever j is not a
likely value for φ
i
(U). Then, each probabilistic al-
gorithm A, that receives as input the share set (par-
tially randomized as above), and that terminates in
polynomially many steps in τ
U
has negligible prob-
ability of success in recovering the original shared
secret.
Binary Features: In the following we describe some
general constructions of the secret locking concept in-
troduced in (Monrose et al., 2002). For simplicity of
argument, we assume that all features assume binary
values, i.e., D = {0, 1}, even though all schemes de-
scribed can be generalized to any finite D. In the bi-
nary case, the range of values R
i
(U) for a feature i
and element U is one of three possibilities, namely
{0}, {1}, or {0, 1}. In the latter we call the fea-
ture non-distinguishing for U , while in the former two
cases the feature is distinguishing.
3.1 Secret Locking Constructions
For each construction, it is sufficient to provide the
algorithms Share and Recover, as the security prop-
erty is not constructive. Instead it must be verified for
each construction. We first describe an implementa-
tion of secret locking introduced in (Monrose et al.,
2002) which is based on the well-known Shamir se-
cret sharing scheme:
Shamir Secret Sharing (SSS) is based on polyno-
mial interpolation. In general, for a random poly-
nomial f(x) over Z
p
of degree d − 1 and a secret
K = f(0) ∈ Z
p
to be shared, a share will be deter-
mined as a point on the polynomial, i.e., as the tuple
(x, f(x)). Using Lagrange interpolation, the knowl-
edge of at least d distinct shares will allow the recon-
struction of the secret K (Shamir, 1979).
In order to construct a secret locking scheme based
on SSS, it is sufficient to choose f(x) as a polyno-
mial of degree m − 1 with f(0) = K. The 2m
shares {s
0
i
, s
1
i
}
1≤i≤m
of secret K are determined as
s
0
i
= f(2i) and s
1
i
= f(2i + 1). Consequently, any
m shares will allow for the reconstruction of the se-
cret K, and clearly one share per row will do. How-
ever, this scheme is not compartmented, but simply
a threshold scheme. Furthermore, it does not pro-
vide security in the sense of our definition if the per-
centage of distinguishing features is small (i.e., less
than 60% of the total number of features). This is
due to the fact that it is then possible to treat the sys-
tem as a Reed-Solomon list decoding problem, which
can be solved by means of a polynomial time algo-
rithms (Guruswami and Sudan, 1998).
A truly compartmented construction based on
unimodular matrix constructions is also presented
in (Monrose et al., 2002), and is the focus of our at-
tention for the remaining part of the paper.
Determinant-based Secret Locking Construction.
The determinant-based scheme introduced in (Mon-
rose et al., 2002) encapsulates a secret by means of a
set of vectors in a vector space. In general, for a se-
cret K ∈ Z
p
to be shared, the shares are determined
as vectors in Z
m
p
. The secret can be reconstructed by
arranging m of the shares in an m × m-dimensional
matrix and computing its determinant.
In order to construct the set of shares, initially m
vectors s
0
i
in Z
m
p
are chosen with the property that
det(s
0
1
, . . . , s
0
m
) mod p = K, the secret to be encap-
sulated. The second set of shares is then determined
by means of a unimodular transformation matrix U =
(u
1
, . . . , u
m
) where u
i
∈ Z
m
p
(1 ≤ i ≤ m). The uni-
modular matrix can be efficiently generated by per-
muting the rows of a random, triangular unimodular
matrix: U = Π·U
′
·Π
−1
, where Π = (π
1
, . . . , π
m
) is
any permutation matrix and U
′
= (u
′
1
, . . . , u
′
m
) is an
upper-triangular matrix that has 1 for each diagonal
element and random elements of Z
q
above the diago-
nal. Eventually, the second set of shares is computed
as s
1
i
= Us
0
i
for 1 ≤ i ≤ m.
It can be easily seen from the way the shares are
constructed, that this scheme indeed implements a
compartmented access structure. In fact, if one share
is picked from each one of the m levels (feature),
the secret K can be reconstructed —due to the uni-
modular relation between the two shares at the same
level. However, if the two shares from the same level
are used, then the reconstructed secret is random, as
SECRET LOCKING: EXPLORING NEW APPROACHES TO BIOMETRIC KEY ENCAPSULATION
257

the unimodular relationship between the two sets of
shares is not preserved. In the following sections, we
discuss the security characteristics of this scheme, and
provide details on an optimized implementation of the
scheme with good performance profile.
3.2 Security
In this section we explore some of the underlying
hard problems that are related to the security of the
determinant-based sharing scheme described above.
Note that while the construction and its analysis are
presented only for the case of binary features, similar
arguments can be presented for the general case.
First, consider the case when all features are dis-
tinguishing, and thus only one sequence of feature
values reveals the secret. By construction, all other
shares are random and cannot be combined with the
true shares to obtain any partial information about the
secret. Moreover, without further information (such
as cipher-text encrypted under the encapsulated key)
the attacker cannot distinguish when the correct secret
is reconstructed. The probability of success is there-
fore 2
−m
, where m is the total number of features.
In the presence of non-distinguishing features the
setting is different. For instance, consider the case
where the first feature is non-distinguishing. Let φ
0
and φ
1
be two feature sequences that differ only in
the first feature, with φ
0
1
= 0 and φ
1
1
= 1. Sup-
pose further that both feature sequences are valid
for U, i.e., lead to reconstruction of the correct se-
cret. That means that the following matrices have the
same determinant: K = det
s
0
1
s
φ
2
2
s
φ
3
3
· · · s
φ
m
m
=
det
s
1
1
s
φ
2
2
s
φ
3
3
· · · s
φ
m
m
, where φ
i
= φ
0
i
= φ
1
i
,
for i > 1. It is well-known that the determi-
nant is a multi-linear function of the matrix columns,
which implies: det
s
0
1
− s
1
1
s
φ
2
2
s
φ
3
3
· · · s
φ
m
m
= 0
mod p. We conclude that if the first feature is non-
distinguishing one finds a non-trivial algebraic rela-
tion on the sets of shares. The method is not construc-
tive, however, because it requires previous knowledge
of a valid sequence of values for all the other features.
In order to search for such relations systematically,
one represents the choice for the value of feature i
as a function of a boolean variable, φ
i
(x
i
) = if x
i
then s
i,1
else s
i,0
. The determinant computation
may then be fully expanded as a boolean circuit, and
the equation which expresses the determinant being
equal to 0 mod p reduced to a single boolean for-
mula. Any satisfying assignment to that formula cor-
responds to a sequence of feature values which may
be a valid sequence for U , and conversely all valid
sequences for U give rise to satisfying assignments.
Since SAT approximation algorithms can generally
only handle relatively small boolean formulas (in the
thousands of variables), the complexity of this ap-
proach can be estimated by studying a relaxation of
the problem. In order to “linearize” the boolean for-
mula, we allow feature choices in the whole field F
q
,
by putting φ
i
(x
i
) = (1 − x
i
)s
i,0
+ x
i
s
i,1
. Note that
φ
i
(0) = s
i,0
and φ
i
(1) = s
i,1
correspond to legiti-
mate shares, while for other values in x
i
∈ F
q
there
is no natural interpretation to the meaning of φ
i
(x
i
).
Linearization enables the use of the rich machinery
of computational algebra to attack the corresponding
“relaxed” problem of finding zeros of the multilin-
ear polynomial ∆(x
2
, . . . , x
n
) which represents the
determinant det(s
0
1
− s
1
1
, (1 − x
2
)s
0
2
+ x
2
s
1
2
, · · · ,
(1 − x
m
)s
0
m
+ x
m
s
1
m
).
n = 5 6
(2, 100, 25, 30.6) (2, 60, 49, 60.25)
7 8
(2, 80, 97, 120.6) (3, 60, 225, 252.3)
9 10
(3, 40, 449, 502.6) (4, 10, 961, 1017.7)
Figure 1: n = # of features. The quadruplet under n = 6
indicates that the # of distinguishing features was 2, and
∆ had a minimum of 49 and an average of 60.25 non-zero
coefficients over 60 random trials.
The complexity of this zero-finding problem was
assessed by means of experiments using the symbolic
computation package MAPLE. In particular, the ex-
periments determined the number of non-zero coef-
ficients of ∆(x
2
, . . . , x
n
), for 5 ≤ n ≤ 10. It was
assumed that only ⌊0.4n⌋ of the features were distin-
guishing —a conservative approach, since the fewer
distinguishing features there are, the more symmetric
the polynomial should be, and the greater the chances
are that some of its coefficients evaluate to 0. The
results or the experiments are shown in Fig. 1. These
results support the security of the scheme, as the num-
ber of non-zero coefficients exhibits an exponential
increase. As a consequence, this renders any alge-
braic attempts to attack the problem ineffective, and in
fact, even the best approximation algorithms known
to date to simply counting zeros (as opposed to find-
ing them) on multilinear polynomials have linear cost
with the number of non-zero coefficients (Karpinski
and Lhotzky, 1991).
4 IMPLEMENTATION
In order to implement the scheme in practice, it is not
sufficient to have error-tolerance purely from the se-
cret sharing construction, as features φ
i
will occasion-
ally assume a value outside the likely range R
i
(U)
even if evaluated on the legitimate user U. We call
ICETE 2005 - SECURITY AND RELIABILITY IN INFORMATION SYSTEMS AND NETWORKS
258

0
5
10
15
20
25
30
128 112 96 82 64 48 32 16
Time (s)
Matrix size
Gauss
Gauss-Bareiss
Figure 2: Time to compute determinants as a function of the matrix size. The times are averaged over 10000 runs.
such errors “noisy errors.” Unlike the natural varia-
tion of measurements within likely ranges, the vari-
ability introduced by noisy errors is not tolerated well
by the secret locking construction. In practice, we
can accommodate a few of these errors by simply ex-
ecuting an exhaustive search on a Hamming ball of
small radius d centered on the measured input se-
quence φ = (φ
i
(U))
i=1,...,m
. We show that with ap-
propriate optimizations, this method is practical for
small values of d, for instance d ≤ 3, which seems
more than sufficient to guarantee a reasonable false
negative rate with keyboard typing patterns (Monrose
et al., 2002).
The first optimization we made was to change the
mechanism for reconstructing the secret from the se-
lected matrix entries. Instead of insisting on sharing
the determinant —which would require working with
matrices over large finite fields F
q
, with log q ≥ 80
—we instead use a hash function such as SHA-1 to
process the concatenation of all matrix entries from
the distinguishing features. Recall from Section 3.2
that once a feature sequence is found with the cor-
rect values for all distinguishing features, the non-
distinguishing positions can be detected by showing
that the determinant remains unchanged if that fea-
ture value is flipped. Using this modified recovery al-
gorithm we can allow the dimension of the base field
to be made much smaller, without affecting the en-
tropy of the keyspace. In our experiments we used
F
q
= Z
8191
, which allows each matrix entry to fit in
a 16-bit buffer. This also enables implementation of
all modular and matrix operations using native 32-bit
integer operations and optimized C code.
Experimental Setup. All the experiments were
conducted on a 64-bit dual 2 GHz PowerPC G5 run-
ning MacOS Server 10.3.5, with 3 GB main mem-
ory, and 4 KB virtual pages. Our implementa-
tion is in C and compiled with gcc 3.3 using the
-O3, -ffast-math, -malign-natural and
-fprefetch-loop-arrays optimization flags.
(For more details on gcc optimizations see (The
GNU Project, 2005).) We note that the Apple G5 pro-
vides native support for 32-bit applications and that
all our code was compiled for a 32-bit architecture.
All arithmetic is performed in Z
∗
p
, where p is prime
and equals 8191 = 2
13
− 1. Since we are working
on a 32-bit architecture and 8191 < 2
16
, all elements
in Z
∗
8191
can be stored in shorts. This means that
multiplication in Z
∗
8191
will not overflow the size of
a regular int and that we can implement the scheme
without multi-precision arithmetic.
Computing Determinants. Given feature sequence
φ
′
, we begin by generating all sequences within a
hamming distance e of φ
′
. We call this set β(φ
′
, e) =
{φ
∗
∈ {0, 1}
m
: dist(φ
∗
, φ
′
) ≤ e}. For each φ
∗
∈
β(φ
′
, e), we then compute K
′
= det(s
φ
∗
1
1
· · · s
φ
∗
m
m
)
and check whether K
′
= K. Since |β(φ
′
, e)| =
P
e
i=0
m
i
, we have to perform a large number of
determinant computations, and therefore it is impor-
tant to optimize the running time of determinant eval-
uation. We first benchmarked the performance of
various determinant algorithms and implementations,
in particular Gaussian elimination and Gauss-Bareiss
(both described in (Cohen, 1993)) and compared their
performance (Fig. 2), concluding that plain Gaussian
elimination performs better in this task. We found
that a large part of the time spent was in the com-
SECRET LOCKING: EXPLORING NEW APPROACHES TO BIOMETRIC KEY ENCAPSULATION
259
0
0.5
1
1.5
2
2.5
32 24 16 8
Time (s)
Feature length
e=1
e=2
e=3
e=3 (no-opt)
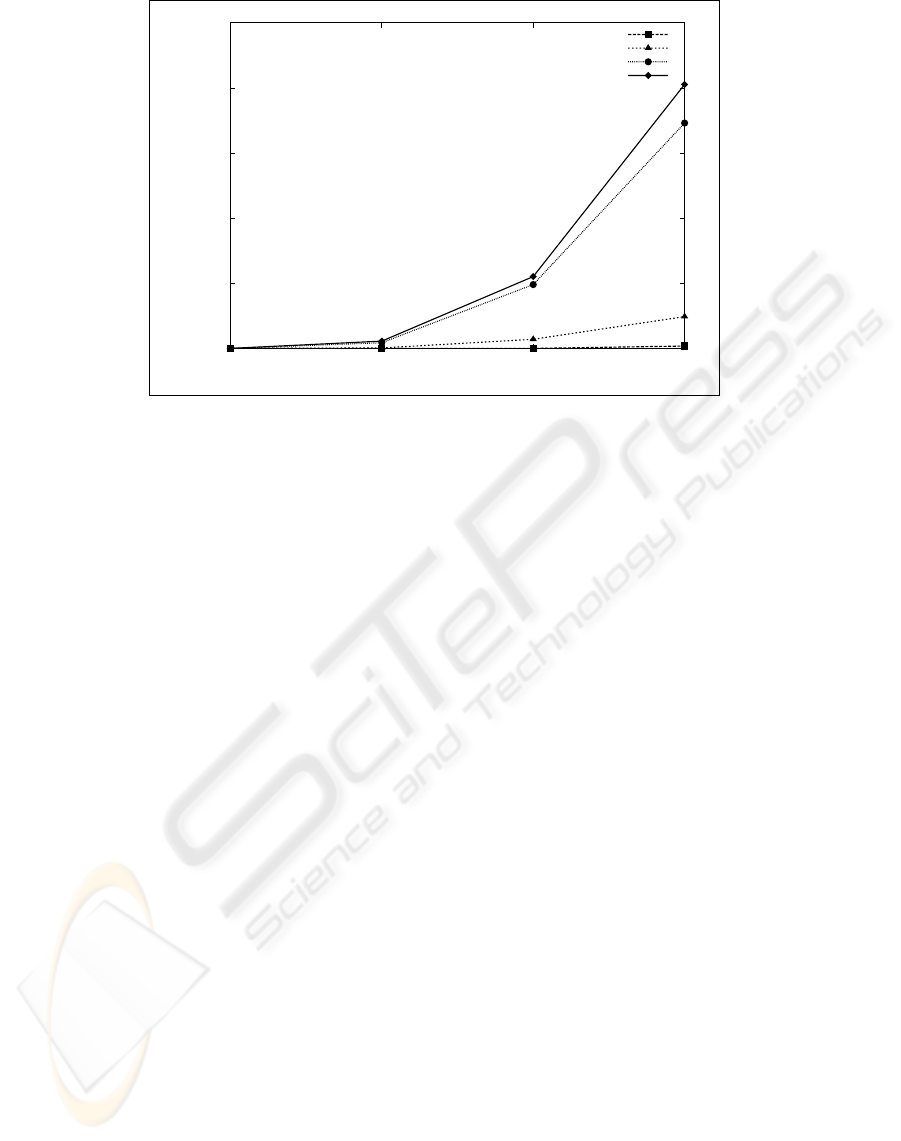
Figure 3: Time to generate β(φ
′
, e) and compute determinants for all its elements as a function of the feature length for
various tolerated errors. Here, 80% of φ
′
’s features are distinguishing. The no-opt line describes the time to perform the same
operations without the re-use of computation.
putation of modular inverses. Consequently, we pre-
computed all inverses in Z
∗
8191
and replaced our use
of the extended Euclidean algorithm by simple table
lookups. Since each element in Z
∗
8191
can be stored
in two bytes, the entire table can fit in approximately
16 KB.
Reusing Computations. Apart from optimizing in-
dividual determinant computations we re-used in-
termediate elimination results to speed up Gaussian
elimination when several determinants are computed
in succession. Consider M
1
and M
2
, two m × m ma-
trices. During Gaussian elimination, elements in col-
umn i only affect elements in columns j > i. If the
leftmost column where M
1
and M
2
differ is i, then
the operations we perform on columns 0 through i−1
when computing det(M
1
) and det(M
2
) will be the
same, and we avoid repetition by storing the interme-
diate results. We take maximum advantage of this op-
timization by choosing an appropriate ordering when
generating all the feature sequences within the Ham-
ming ball. The results are in Fig. 3. In the case of key-
board biometrics, the number of features is approxi-
mately 15 and one noisy error must be corrected with
12 distinguishing features (numbers from (Monrose
et al., 2002)), which our implementation can compute
in a fraction of a second. A measure with twice as
much entropy, say 30 features and two noisy errors,
would also take less than half a second. These re-
sults were obtained in a relatively powerful machine
by today’s standards, however these times are suffi-
ciently small that we feel confident the scheme can be
practically implemented in most current 32-bit archi-
tectures.
5 CONCLUSIONS AND FUTURE
WORK
While the security analysis in this paper does not con-
stitute a complete proof in the standard model, the
outlined heuristic connections between the security of
the scheme and well-known hard problems in compu-
tational mathematics show the difficulty of the under-
lying problem. The remaining open questions will be
addressed by future research. In addition, future work
includes testing of the implementation for use in the
context of other non-static biometrics (e.g., voice pat-
terns).
REFERENCES
Bleichenbacher, D. and Nguyen, P. (2000). Noisy poly-
nomial interpolation and noisy chinese remaindering.
In Advances in Cryptology—Proc. of EUROCRYPT
’2000, volume 1807 of LNCS, pages 53–69. Springer-
Verlag.
Boyen, X. (2004). Reusable cryptographic fuzzy extractors.
In Proc. of the 11
th
ACM Conf. on Comp. and Comm.
Secur. ACM Press.
Brickell, E. F. (1989). Some ideal secret sharing schemes.
Journal of Combinatorial Mathematics and Combina-
torial Computing, 9:105–113.
Cohen, H. (1993). A Course in Computational Algebraic
Number Theory, volume 183 of Grad. Texts in Math-
ematics. Springer-Verlag.
Davida, G. I., Frankel, Y., and Matt, B. J. (1998). On en-
abling secure applications through off-line biometric
ICETE 2005 - SECURITY AND RELIABILITY IN INFORMATION SYSTEMS AND NETWORKS
260

identification. In Proc. of the 1998 IEEE Symp. on
Secur. and Privacy, pages 148–157.
Doddington, G., Liggett, W., Martin, A., Przybocki, M.,
and Reynolds, D. (1998). Sheep, goats, lambs and
wolves. a statistical analysis of speaker performance
in the nist 1998 speaker recognition evaluation. In
Proc. of the 5
th
International Conference on Spoken
Language Processing.
Dodis, Y., Reyzin, L., and Smith, A. (2004). Fuzzy extrac-
tors and cryptography, or how to use your fingerprints.
In Proc. of Adv. in Cryptology–Eurocrypt’04.
Ellison, C., Hall, C., Milbert, R., and Schneier, B. (2000).
Protecting secret keys with personal entropy. Future
Generation Computer Systems, 16:311–318.
Ghodosi, H., Pieprzyk, J., and Safavi-Naini, R. (1998). Se-
cret sharing in multilevel and compartmented groups.
In Proc. of the 3rd Australasian Conf. on Info. Se-
cur. and Privacy (ACISP’98), volume 1438 of LNCS,
pages 367–378. Springer-Verlag.
Guruswami, V. and Sudan, M. (1998). Improved decoding
of reed-solomon and algebraic-geometric codes. In
Proc. of the 39
th
IEEE Symp. on Found. of Comp. Sci.,
pages 28–37.
Joyce, R. and Gupta, G. (1990). Identity authorization
based on keystroke latencies. Comms. of the ACM,
33(2):168–176.
Juels, A. and Sudan, M. (2002). A fuzzy vault scheme.
In Proc. of the 2002 IEEE Internl. Symp. on Inform.
Theory, pages 480–ff.
Juels, A. and Wattenberg, M. (1999). A fuzzy commitment
scheme. In Proc. of the 6
th
ACM Conf. on Comp. and
Comm. Secur., pages 28–36.
Karpinski, M. and Lhotzky, B. (1991). An (ǫ, δ)-
approximation algorithm of the number of zeros of a
multi-linear polynomial over gf[q]. Technical Report
1991-8569, Uni. Bonn, Inst. f
¨
ur Informatik, Abteilung
V.
Monrose, F., Reiter, M. K., Li, Q., and Wetzel, S. (2001).
Cryptographic key generation from voice (extend.
abst.). In Proc. of the 2001 IEEE Symp. on Secur. and
Privacy.
Monrose, F., Reiter, M. K., and Wetzel, S. (2002). Password
hardening based on keystroke dynamics. Internl. J. of
Info. Secur., 1(2):69–83.
Shamir, A. (1979). How to share a secret. Comms. of the
ACM, 22(11):612–613.
Simmons, G. (1990). How to (really) share a secret. In
Goldwasser, S., editor, Adv. in Cryptology–Proc. of
CRYPTO’88, volume 403 of LNCS, pages p390–448.
Springer-Verlag.
Soutar, C. and Tomko, G. J. (1996). Secure private key
generation using a fingerprint. In Cardtech/Securetech
Conf. Proc., volume 1, pages 245–252.
The GNU Project (1988–2005). The GNU compiler collec-
tion. http://gcc.gnu.org.
SECRET LOCKING: EXPLORING NEW APPROACHES TO BIOMETRIC KEY ENCAPSULATION
261
