
OPTIMAL TRADE-OFF FOR MERKLE TREE TRAVERSAL
Marek Karpinski
∗
Dept. of Computer Science
University of Bonn
Yakov Nekrich
†
Dept. of Computer Science
University of Bonn
Keywords:
Identification and Authentication, Merkle Trees, Public Key Signatures, Authentication Path, Fractal Tree
Traversal, Trade-off, Amortization.
Abstract:
In this paper we describe optimal trade-offs between time and space complexity of Merkle tree traversals
with their associated authentication paths, improving on the previous results of Jakobsson, Leighton, Micali,
and Szydlo (Jakobsson et al., 03) and Szydlo (Szydlo, 04). In particular, we show that our algorithm requires
2 log n/ log
(3)
n hash function computations and storage for less than (log n/ log
(3)
n+1) log log n+2 log n
hash values, where n is the number of leaves in the Merkle tree. We also prove that these trade-offs are optimal,
i.e. there is no algorithm that requires less than O(log n/ log t) time and less than O(t log n/ log t) space for
any choice of parameter t ≥ 2.
Our algorithm could be of special use in the case when both time and space are limited.
1 INTRODUCTION
Merkle trees have found wide applications in cryp-
tography mainly due to their conceptual simplicity
and applicability. Merkle trees were first described by
Merkle (Merkle, 82) in 1979 and studied intensively.
In cryptographic applications, however, Merkle trees
were not very useful for small computational devices,
as the best known techniques for traversal required a
relatively large amount of computation and storage.
Several recent papers, e.g., (Jakobsson et al., 03) and
(Szydlo, 04), improved the time and space complex-
ity of Merkle trees. In this paper we address the issue
of possible further improvements of Merkle tree tra-
versals.
Merkle tree is a complete binary tree such that val-
ues of internal nodes are one-way functions of the val-
ues of their children. Every leaf value in a Merkle tree
can be identified with respect to a publicly known root
and the authentication path of that leaf. An authen-
tication path of a leaf consists of the siblings of all
nodes on the path from this leaf to the root.
∗
Work partially supported by DFG grants , Max-Planck
Research Prize, DIMACS and IST grant 14036 (RAND-
APX).
†
Work partially supported by IST grant 14036 (RAND-
APX).
Merkle trees have many cryptographic applica-
tions, such as certification refreshal (Micali, 97),
broadcast authentication protocols (Perrig et al., 02),
third party data publishing (Devanbu et al., 01),
zero-knowledge sets (Micali et al., 03) and micro-
payments (Rivest, Shamir, 96). A frequent prob-
lem faced in such applications is the Merkle tree tra-
versal problem, the problem of consecutively out-
putting the authentication data for every leaf. In
(Merkle, 87) Merkle has proposed a technique for
traversal of Merkle trees which requires O(log
2
n)
space and O(log n) time per authentication path in
the worst case. Recently, two results improving a
technique of Merkle have appeared. In (Jakobsson
et al., 03) the authors describe a Merkle tree tra-
versal algorithm with O(log
2
n/ log log n) space and
O(log n/ log log n) time per output. In (Szydlo, 04)
Szydlo describes a method requiring O(log n) space
and O(log n) time and provides a proof that this
bound is optimal, i.e. he proves that there is no traver-
sal algorithm that would require both o(log n) space
and o(log n) time. Observe that we measure the time
complexity of outputting the authentication path of a
single leaf.
In this paper we investigate further the trade-off be-
tween time and space requirements of Merkle tree tra-
versals.
275
Karpinski M. and Nekrichâ
˘
A
˘
a Y. (2005).
OPTIMAL TRADE-OFF FOR MERKLE TREE TRAVERSAL.
In Proceedings of the Second International Conference on e-Business and Telecommunication Networks, pages 275-282
DOI: 10.5220/0001414202750282
Copyright
c
SciTePress
First, we present an algorithm that works in
O(log n/h) time and
O((log n/h)2
h
) space per round for arbitrary para-
meter h ≥ 1. For h = O(1) our result is equivalent
to the result of Szydlo; however, we consider all op-
erations (not just computations of one-way functions)
in our analysis. Our result is also an extension of that
of Jakobsson, Leighton, Micali and Szydlo (Jakobs-
son et al., 03); we prove that it can be extended for
arbitrary values of h.
Secondly, we show that the results of Szydlo
and Jakobsson, Leighton, Micali, Szydlo remain
true, if we consider all operations and not just
hash computations. (If h is not a constant,
we ignore time that we need to output the val-
ues in the last case). In particular, we show
that an algorithm with 2 log n/ log log log n hash
functions evaluations and storage requirement of
(log n/ log log log n + 1) log log n + 2 log n hash val-
ues per output can be constructed. This algorithm
works with O(log n/ log
(3)
n) operations per output.
At the end, we show that if a tree traversal algo-
rithm works in time O(log n/h), then required space
is Ω((log n/h)2
h
). Thus we show that our trade-off
is optimal.
The presented results give a complete answer to the
question of time and space complexity of the Merkle
tree traversal problem. These results are also impor-
tant for practical applications.
2 PRELIMINARIES AND
NOTATION
Below we denote by a hash a one-way function, and
hash computation will denote a computation of the
value of a one-way function. In a Merkle tree leaf
values are hash values of leaf pre-images. Leaf pre-
images can be, for instance, generated with a pseudo-
random generator. We will denote by leaf-calc a
function that computes pre-images of the leaves.
Let φ
1
=hash◦leaf-calc be the function that computes
value of the i-th leaf. Let φ
2
(parent)=hash(left-
child||right-child) be the function that computes the
value of the parent node from the values of its chil-
dren. We will presume that we need one computation
unit to compute φ
1
or φ
2
.
We must generate n outputs, where n is the num-
ber of leaves. Every output consists of the leaf pre-
image and its authentication path. An authentication
path consists of the siblings of all nodes on the path
to the root. Outputs for the leaves must be gener-
ated consecutively left-to-right. This makes our task
easier, because outputs for consecutive leaves share
many common node values.
In order to verify a leaf, one consecutively com-
putes the values of its ancestors. Verification succeeds
only if the computed root value equals to the known
root value.
In this paper the following notation will be used. H
will denote the Merkle tree height. We will say that a
node is on level A, if its depth is H −A. The i-th node
from the left on level A will be denoted by (A, i). A
job, computing node (A, i) will also be denoted by
(A, i). We will say that A is the job level and i is the
index of the job. Sometimes we will identify a subtree
of the Merkle tree by its root node (A, i). We will
use a subtree height h as a parameter in our algorithm
and L will be equal to H /h. We say that a node N is
needed if it is a part of an authentication path.
3 MAIN IDEA
We describe here the main idea of our algorithm and
key observations on which the algorithm is based.
The well-known evaluation algorithm, shown on
Fig. 1, is used to compute the value of the i-th node
on level A and is an important part of all Merkle tree
traversal algorithms.
Eval (A,i)
if (A == 0)
return φ
1
(i);
else
minlev := A − 1
V := Eval(A − 1, 2i)
V := φ
2
(V, Eval(A − 1, 2i + 1))
minlev := A
return V
Figure 1: Evaluation of the i-th node on level A
This basic version of algorithm Eval requires
O(2
A
) computational units and A storage units. The
last follows from the fact that at most one node value
V for every height i = 0, 1, . . . , A has to be stored at
every stage of the algorithm. These stored values will
be further called tail values. Variable minlev stores
the value of the minimal level and equals to the min-
imum level for which the tail value of a job must be
stored.
Our algorithm uses procedure Eval to estimate
the values of nodes that will be needed in the fu-
ture authentication paths. The set of computations
for finding the value of node (A, i) using procedure
Eval(A, i) will be further called a job (A, i).
Our algorithm combines two important observa-
tions that were also used in the papers of Jakobsson,
Leighton, Micali and Szydlo (Jakobsson et al., 03),
ICETE 2005 - SECURITY AND RELIABILITY IN INFORMATION SYSTEMS AND NETWORKS
276

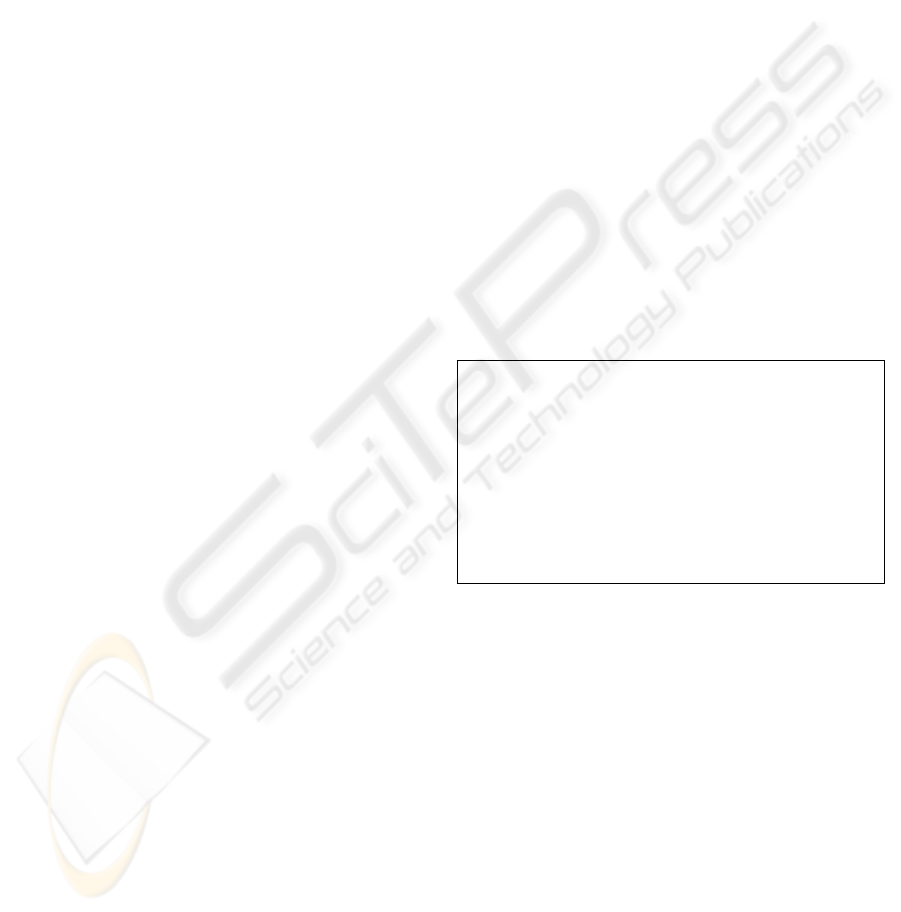
and Szydlo (Szydlo, 04). The first key observation
on which our algorithm is based is that during the
computation of node (A, i) its children (A − 1, 2i),
(A − 1, 2i + 1) as well as all other descendants are
computed. Therefore by storing intermediate results
of evaluation some future computations can be saved.
Actually, for every computed node N on level ih all
its descendants on levels ih − 1, . . . , ih − h (i.e. a
complete subtree of height h rooted in N) will be re-
tained to be used in the future authentication paths.
Thus only nodes at height ih, i = 1, . . . , L will be
computed directly (see Fig 2).
Another key observation is that we can schedule
the computations of the nodes needed in the future in
such a way that at most H storage units are necessary
to store all tail values.
In section 6 a further constant improvement is de-
scribed. We show that in a subtree only nodes with
odd indices must be stored. We also show that the
next subtree can be computed as the nodes of the cur-
rent subtree are discarded so that the total number of
nodes used by subtrees on a level is 2
h
.
4 ALGORITHM DESCRIPTION
Our algorithm consists of three phases: root genera-
tion, output, and verification. During the first phase
the root of the Merkle tree is generated. Addition-
ally, the initial set of subtrees with roots at (0, 2
ih
),
i = 1, . . . , L is computed and stored. The verification
phase is identical to the traditional verification phase
(see, for instance, (Jakobsson et al., 03)). The output
phase consists of 2
H
rounds, and during round j an
image of the j-th leaf and its authentication path are
output. In the rest of this section we will describe an
algorithm for the output phase and prove its correct-
ness.
For convenience we will measure time in rounds.
During each round 2L computation units are spent on
computation of subtrees needed in the future authen-
tication paths. Thus our algorithm starts at time 0 and
ends at time 2
H
− 1, and the i-th round starts at time
i. In the first part of the algorithm description we will
ignore the costs of all operations, except of the com-
putations of hash functions. Later we will show that
the number of other operations performed during a
round is O(L).
During round j we store L already computed sub-
trees with roots at (sh, m
s
) where j ∈ [m
s
2
sh
, (m
s
+
1)2
sh
), s = 0, 1, . . . , L. During the same round we
also spend 2L computation units in order to compute
jobs (sh, m
s
+ 1) and construct the corresponding
subtrees. At round (m
s
+ 1)2
sh
the subtree (sh, m
s
)
will be discarded, However the subtree (sh, m
s
+ 1)
will be retained for the next 2
sh
rounds, while subtree
(sh, m
s
+ 2) is computed.
During each round there are at most L different
jobs competing for 2L computation units. These jobs
will be called active. Active jobs are scheduled ac-
cording to the following rules:
1. A job (ih, k) k = 1, . . . , H/2
ih
becomes active at
time (k −1)2
ih
, i.e. during the (k −1)2
ih
-th round.
2. All active jobs (s
′
, k
s
′
) with s
′
> s such that mini-
mal level of (s
′
, k
s
′
) does not exceed s have priority
over the job (s, k
s
) on level s.
3. In all other cases jobs with the lower level have pri-
ority over jobs with the higher level.
Consider job (sh, i) that becomes active at time
2
sh
(i − 1). Rule 2 guarantees us that all jobs with
levels s
′
h such that s
′
> s do not store any tail val-
ues on levels 1, 2, . . . , sh − 1 when the computation
of job (sh, i) starts. Therefore, when job (sh, i) is
computed, only one tail node on each of the levels
(s − 1)h, (s − 1)h + 1, . . . , sh − 1 will be stored.
Now consider a job (s
′′
h, is
′′
) on level s
′′
h, s
′′
=
1, . . . , s − 1. If job (sh, i) stores a tail node on level
˜s < s
′′
, then (s
′′
h, is
′′
) is either already completed
(rule 3), or did not start yet (rule 2).
This scheduling guarantees us that at any time only
one tail value for a level i = 1, 2, . . . , H will be stored
by all jobs (sh, i). Only 2L subtrees (one currently
used and one currently computed for each level ih)
must be stored at each round, and subtrees require
(2H/h)(2
h+1
−1) space. Hence the memory require-
ment of our algorithm is O((2H/h)2
h
) + O(H) =
O((H/h)2
h
).
These considerations allow us to formulate the fol-
lowing trade-off between time and space complexity.
Theorem 1 Merkle tree can be traversed in time
O(H/h) with O((H/h)2
h
) storage units for any h ≥
1.
Corollary 1 Merkle tree can be traversed in time
O(log n/ log
(3)
n) with
O(log n log log n/ log
(3)
n) storage units.
In the next subsections we will prove the algorithm
correctness by showing that all values are computed
on time, and we prove the time bound stated in the
theorem by analysis of the operations necessary for
the job scheduling.
4.1 Correctness Proof
In this section we show that job (sh, k) will be com-
pleted at time k2
sh
.
Lemma 1 Suppose that at time (k − 1)2
sh
for every
level i = h, 2h, . . . , (s−1)h, (s +1)h, . . . Lh there is
at most one unfinished job on level i. Then job (sh, k)
will be completed before k2
sh
.
OPTIMAL TRADE-OFF FOR MERKLE TREE TRAVERSAL
277
2 2 2
h+1
h+2
h
h
h
h
h
Figure 2: Subtrees computed at a round of the algorithm
Proof: Consider the time interval [(k − 1)2
sh
, k2
sh
).
There is at most one job (s
′′
h, k
s
′′
) with s
′′
> s, such
that the minimal level of (s
′′
h, k
s
′′
) is smaller than
s. After less than 2
sh+1
hash computations minimal
level of (s
′′
h, k
s
′′
) will be at least sh. Besides that,
there are also jobs with lower indices that must be
completed before (sh, k ) can be completed. There are
at most 2
(s−s
′
)h
such jobs for every s
′
< s. All jobs
on level s
′
h require less than 2
(s−s
′
)h
2
s
′
h+1
= 2
sh
computation units for every s
′
< s. Hence, the total
number of computation units needed for these jobs is
(s − 1)2
sh
. Thus we have 2
sh+1
computation units
left to complete the job (sh, k).
Lemma 2 At every moment of time there is only one
running job on level sh, s = 1, 2, . . . , L.
Proof: At time 0 we start only one job on level sh.
For every level sh and every index i, we can prove
by induction using Lemma 1 that at time interval
[2
sh
i, 2
sh
(i + 1)) there is only one running job with
index i on level sh.
Lemma 3 The computation of job (sh, i) will be fin-
ished before time i2
sh
Proof: Easily follows from Lemma 1 and Lemma 2.
In our computation only every h-th node on the
computation path is computed directly. Below we will
show which nodes should be retained during the com-
putation of (sh, i).
All nodes (ih − m, s2
m
+ j), where m = 1, . . . , h
and j = 0, . . . , m − 1 must be retained. In other
words, all descendants of (ih, s) at levels ih −
1, . . . , (i − 1)h must be retained.
Proposition 1 Descendants of a node (ih, m) are
needed during rounds [m2
ih
, (m + 1)2
ih
).
Proof: Indeed, children of (ih, m) are needed during
rounds [m2
ih
+2
h−1
, (m+1)2
ih
) and [m2
ih
, m2
ih
+
2
h−1
). For descendants on other levels this proposi-
tion is proved by the fact that when a node is needed,
the sibling of its parent is also needed.
Combining Lemma 3 with Proposition 1, we see
that every node will be computed before it is needed
for the first time.
4.2 Time Analysis
We have shown above that our algorithm performs 2L
hash function computations per round. Now we will
show that all other operations will take O(L) time per
round.
Lemma 4 Job scheduling, according to rules 1.-3.
can be implemented in O(L) time per round.
For every level s = ih we store a list Q
i
of level s
jobs that have to be performed. When a new job on
level ih becomes active or when the minimal level of
some job becomes smaller than ih, it is added to Q
i
.
Lists Q
i
are implemented as queues (FIFO).
At round j our algorithm checks all queues Q
i
in
ascending order. If a non-empty Q
i
is found, we
spend 2L hash computations on computing the last
job l in Q
i
. If the job l is finished after k < 2L hash
computations, or if the minimal level of l becomes
ICETE 2005 - SECURITY AND RELIABILITY IN INFORMATION SYSTEMS AND NETWORKS
278

higher than (i + 1)h − 1 we remove l from Q
i
and
traverse queues Q
i
, Q
i+1
, . . . Q
L
until another non-
empty queue is found.
Procedure Eval can require up to H − 1 recursive
calls in the worst case. However, an equivalent non-
recursive implementation is possible (see procedure
EvalBottom in Appendix ).
5 THE LOWER BOUND
In this section we prove the lower bound on space and
time complexity of Merkle tree traversals and show
that the algorithm described above is asymptotically
optimal. We prove the following result:
Theorem 2 Any Merkle tree traversal algorithm
with average time per round O(log n/a) requires
Ω((log n/a)2
a
) space for any a > 1 .
In order to prove this theorem, we will consider only
time required for the hash computations.
First, we distinguish between nodes with even and
odd indices, further called even and odd nodes re-
spectively. Even internal nodes are needed after their
children. In case of odd internal nodes the situation
is opposite: they are needed before their children.
Namely, (s, 2i + 1) is needed during the time inter-
val [2i2
s
, (2i + 1)2
s
) and its children, (s − 1, 4i + 3)
and (s − 1, 4i + 2), are needed during [2
s−1
(4i +
2), 2
s−1
(4i+3)) and [2
s−1
(4i+3), 2
s−1
(4i+4)) re-
spectively. We can generalize this observation: an odd
node is needed before all its proper descendants. We
have just proved it for children; to extend the proof
by one more generation, observe that when a node is
needed and it is not the root, then the sibling of its
parent is needed.
During the computation, when we execute
v = Eval(s, i) = φ
2
(Eval(s−1, 2i), Eval(s−1, 2i+1))
we can remove v
0
= Eval(s − 1, 2i) and v
1
=
Eval(s − 1, 2i + 1) or not. Suppose that we are not
removing value v
j
, j = 0, 1, even though we will not
keep v
j
until it is needed . Then we can normalize
our algorithm by removing v
j
and keeping v instead:
computing v is the only use for v
j
other than including
it in a certificate. Clearly, this normalization increases
neither memory nor time.
For every odd node in a Merkle tree we do three
things: (a) we account for a certain number of steps –
steps used to compute this node using other remem-
bered values, (b) we account for a certain number of
memory units (one memory unit allows to store one
value through one round) and (c) we account for a
certain number of job units; job units correspond to
the steps that would be executed if this value were
computed from scratch.
Computing Eval(s, i) takes 2
s+1
− 1 computation
units, and in our lower bound reasoning we can esti-
mate this as 2
s
steps. By adding s’s over all needed
odd nodes we obtain the total number of job units.
The number of job units for odd nodes on level s
is 2
s
2
H−s−1
= 2
H−1
= n/2. Therefore the to-
tal number of job units for odd nodes of the Merkle
tree is Hn/2. We do not count the costs of comput-
ing needed values of even nodes in our lower bound
proof.
We account for the remembered values in order in
which children precede the parents.
Suppose that we remember the value of node v
0
during the computation of node v, but do not remem-
ber the value of v
1
, where v
1
is an ascendant of v
0
.
Then we can save more job units by remembering v
1
instead of v
0
. Hence, if we remember the value of v
0
on level l
0
during computation of node v on level l,
then values of all nodes on levels l
0
, l
0
+ 1, . . . , l are
also remembered. Therefore when a node on level s
is computed it is either computed “from scratch” with
2
s+1
− 1 steps or it is computed with 1 step because
its children were already computed and remembered.
Suppose that we remember the result Eval(s, 2i +
1) and we use this value a times for computation of
node values (including node (s, 2i+1) ). The last use,
when Eval(s, 2i + 1) is needed, requires 2
s
memory
units. If we want to use this value twice, we have to
compute it before its parent (or other odd ancestor is
needed), and since the parent (ancestor) is needed for
2
s+1
rounds or more, we need at least 2
s+1
memory
units. By induction, if we want to use Eval(s, 2i +
1) for a node values, we need to use at least 2
a−1
2
s
memory units.
Consider a node (s, 2i + 1). Suppose that its value
was used in a computations. As shown above, we
need either 2
s+1
− 1 steps or 1 step to compute it. If
we need 1 step, then the total number of job values
we accounted for is a, and the total number of mem-
ory units is 2
a−1
2
s
. Suppose that we needed 2
s+1
−1
steps to compute (s, 2i + 1). Then the total number
of job units is a(2
s+1
− 1), and the number of mem-
ory units is 2
a−1
2
s
. Now we can distribute the steps
and memory units between the job units that we have
accounted for. Each of them receives a
−1
steps and at
least 2
a−1
/a memory units.
If we use z
k
to express the amount of steps a
job unit k = 1, 2, . . . , Hn/2 obtains, then the min-
imal number of obtained memory units is f(z
k
) =
1
2
z
k
2
1/z
k
. Note that f (z) is a convex function of z
(the second derivative is positive for positive z). The
total number of steps
P
z
k
= Hn/2a. Since f(z) is
convex,
1
Hn/2
P
f(z
k
) ≥ f(
z
k
Hn/2
) and
P
f(z
k
) ≥
(Hn/2)f(a) = 2
a
/a × Hn/4
Thus we have shown that if the computation takes
Hn/2a steps, then it uses at least 2
a
/a×Hn/4 mem-
OPTIMAL TRADE-OFF FOR MERKLE TREE TRAVERSAL
279

ory units. Since the total number of rounds is n,
during an average round we must remember at least
H2
a
/4a values.
6 A CONSTANT IMPROVEMENT
In this section we describe an improved version of
the algorithm from the section 4. In our improved
version we do not compute all nodes in the subtrees.
Instead of this, only the nodes with odd indices are
computed. This is possible because even nodes will
be needed after their children are needed. Therefore,
if we store both children of an even node until their
parent is needed, we can compute its value with one
hash computation.
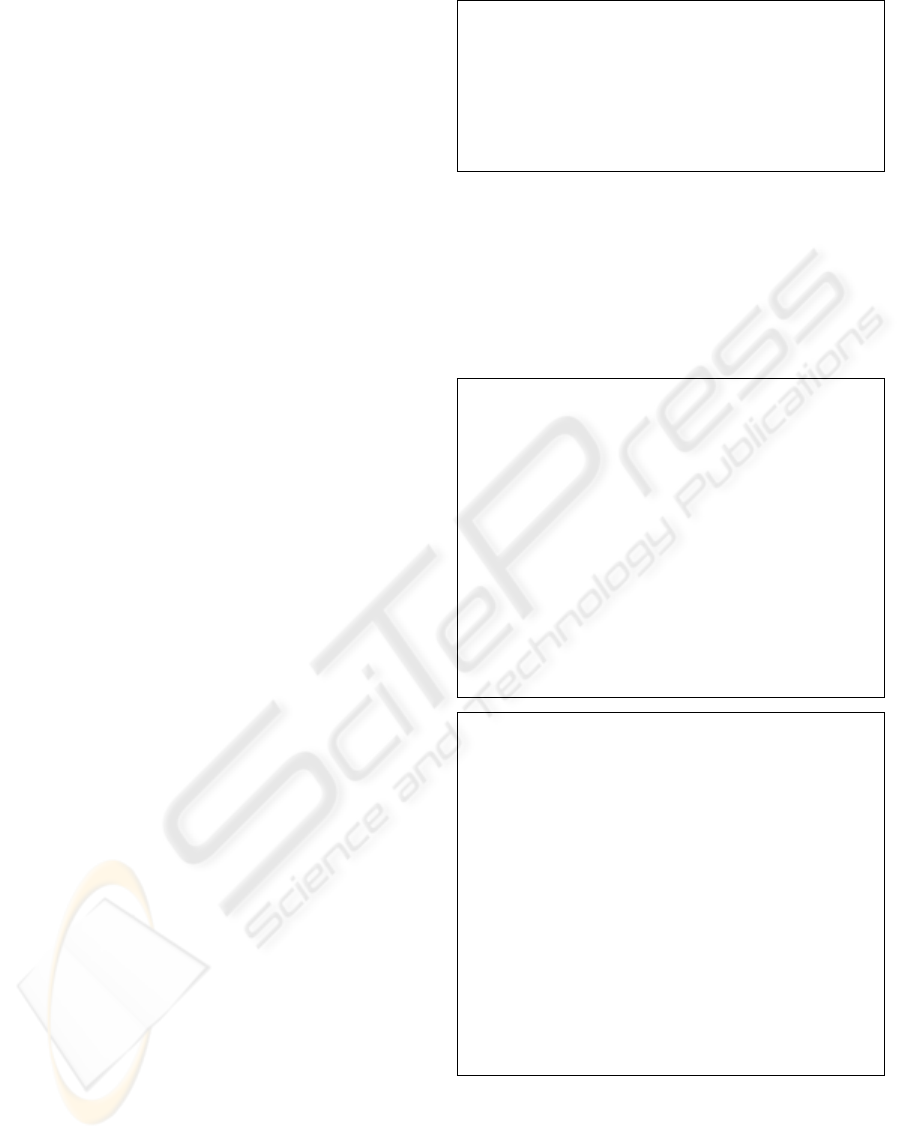
Thus, in a subtree (ih, k) we only compute nodes
(ih − 1, 2k + 1), (ih − 2, 4k + 1), (ih − 3, 8k + 1), . . .
and only the nodes (ih − 1, 2k + 1), (ih − 2, 4k +
1), (ih − 2, 4k + 3), . . . , (ih − h, k2
h
+ 1), . . . , (ih −
h, k2
h
+ 2
h
− 1) must be stored. (see an example on
Fig. 3)
Computation of all odd descendants of (ih, k) will
take time 2
ih−1+1
−1+2
ih−2+1
−1+. . .+2
ih−h+1
−
1 =
P
h−1
k=0
2
ih−k
− h = 2
ih+1
− 2
(i−1)h+1
− h. We
will need h extra hash computations to compute the
even nodes. Therefore the total number of computa-
tions for subtree (ih, k) is 2
ih+1
− 2
(i−1)h+1
.
It is easy to see that there is at most one “new” even
node at every round. Therefore it takes at most one
extra computation per round to deal with even nodes
(if we compute even nodes just as they are needed ).
To compute the node (s, j) with one hash computa-
tion we have to store its odd child (s−1, 2j+1) during
rounds [(2j + 1)2
s−1
, (2j + 2)2
s−1
). Thus there are
at most h odd nodes that should be kept “extra time”
and at most h nodes that are a part of an authentica-
tion path during each round. Therefore the total mem-
ory requirement is (2
h
− 1 + 2h)L per subtree. We
need the first summand to store the odd nodes in the
subtree and we need the second summand to store the
even nodes from the current authentication path and
odd nodes kept “extra time”.
The nature of our trade-off depends on the subtree
height h. For subtree height h = 1 this improvement
results in speed-up of almost factor 2. This allows us
to formulate the following result
Corollary 2 A Merkle tree traversal algorithm can
be implemented with log n hash function evalua-
tions, 3 log n memory locations for hash values and
O(log n) time for other operations per round
For larger values of h the time improvement be-
comes very small but we have an almost two-fold de-
crease of the space used by hash values. In the last
case we can also schedule our computation in such
way that the values in the next subtree are computed
almost exactly at the time when the corresponding
values in the current subtree “expire” and can be dis-
carded. In this case at most one extra value per sub-
tree would have to be stored. In our modified pro-
cedure computation of odd nodes of subtree (ih, k),
i = 2, 3, , . . . , L − 1 is divided into two stages. In
the first stage descendants of (ih, k) on level (i − 1)h
(“leaves” of the subtree) are computed. We will fur-
ther call nodes ((i − 1)h, 2
h
k + j), j ∈ [0, 2
h
) bot-
tom level nodes of subtree (ih, k). In the second stage
the odd nodes are computed from bottom level nodes.
Observe that computation of the subtree (ih, k) takes
place in the same time interval [2
ih
(k − 1), 2
ih
k) as
in our first algorithm. The idea of our modification is
that nodes ((i − 1)h, 2
h
k + j), j ∈ [0, 2
h
), i.e. bot-
tom level nodes of (ih, k), are computed slower than
odd nodes of subtree (ih, k − 1) are discarded. Com-
putation of the odd nodes from the bottom tree nodes
is performed during the last 2
h
rounds of the inter-
val [2
ih
(k − 1), 2
ih
k). We will further call the jobs
computing the bottom level nodes secondary jobs,
and the last job computing the remaining odd nodes
of the subtree will be called a primary job. In order
to reserve 2
h
rounds for the primary job, we allocate
2
(i−1)h
−1 rounds for computation of every secondary
job. A pseudocode description of the modified proce-
dure Eval is given in Appendix.
Now we prove the space bound of our modified al-
gorithm. First we show that a secondary job of a node
on ih can be completed in 2
(i−1)h
− 1 rounds.
Lemma 5 Suppose that at time (k − 1)2
ih
+
m2
(i−1)h
− m, m = 0, 1, . . . , 2
h
− 1 for every level
l = h, 2h, . . . , (i − 1)h, (i + 1)h, . . . Lh there is at
most one unfinished secondary job of a job on level l.
Then the m-th secondary job of (ih, k) will complete
before (k − 1)2
ih
+ (m + 1)2
(i−1)h
− m − 1 .
Proof: Consider the time interval [(k − 1)2
ih
+
m2
(i−1)h
−m, (k −1)2
ih
+(m+1)2
(i−1)h
−m−1).
There is at most one job (i
′′
h, k
i
′′
) with i
′′
> i,
such that the minimal level of (i
′′
h, k
i
′′
) is smaller
than i. After at most 2
ih+1
− 2 hash computations
minimal level of (i
′′
h, k
i
′′
) will be at least ih. Be-
sides that, there are also jobs on lower levels that must
complete before (sh, k) can be completed. There are
at most 2
(i−i
′
)h
such jobs for every index 1 < i
′
< i.
Thus for any fixed i
′
< i all jobs on level i
′
require
2
(i−i
′
)h
(2
i
′
h+1
− 1) < 2
ih+1
− 2 job units. Another
(2
h+1
− 1)2
(i−1)h
< 2
ih+1
− 2 computation units are
claimed by subtrees on level h. Hence the total num-
ber of computation units required by all other jobs is
strictly less than (L − 1)(2
ih+1
− 2).
Thus we have at least 2
ih+1
− 1 computation units
left to complete the m-th secondary job of (ih, k).
ICETE 2005 - SECURITY AND RELIABILITY IN INFORMATION SYSTEMS AND NETWORKS
280

Figure 3: Example of a subtree. Computed nodes are marked by circles. Nodes marked by circles or squares are stored.
Lemma 6 Computation of the m-th secondary job of
(ih, k), i = 2, 3, . . . , L−1 will be finished before time
(k − 1)2
ih
+ (m + 1)2
(i−1)h
− m − 1
Proof is analogous to the Proof of Lemma 3
It easily follows from Lemma 6 and the above dis-
cussion that the computation of the m-th bottom node
of (sh, k) will be finished in interval [2
ih
(k − 1) +
m2
(i−1)h
−m, 2
ih
(k−1) +(m+1)2
(i−1)h
−m−1). It
remains to compute how many odd nodes of (ih, k −
1) are discarded before 2
ih
(k − 1) + m2
(i−1)h
− m.
Let w = 2
h
. After 2
h(i−1)
m rounds the number
of remaining nodes can be estimated as (w − m)/2 +
(w−m)/4+. . .+(w−m)/w ≤ (w−m). We did not
count the nodes of the current authentication path in
this estimation. Therefore the total number of stored
nodes in subtrees (ih, k) and (ih, k − 1) in interval
[2
ih
(k − 1), 2
ih
k − 2
h
) is limited by 2
h
.
The primary job for (sh, k) can be computed in 2
h
rounds. This job can be performed in-place, because
when a new node is computed its even child can be
discarded.
In the modified algorithm we apply the job schedul-
ing scheme only to subtrees on levels ih, i =
2, . . . , L−1. Since there is only one subtree for i = L,
it is not recomputed. Therefore the total number of
tail nodes does not exceed H − h.
During each round we use two reserved computa-
tion units to compute the next level h subtree. By
the same argument as above we can see that the num-
ber of remaining nodes in the current level h subtree
after m rounds is limited by 2
h
− m . Therefore
the total number of nodes in the current and future
subtrees of level h is limited by 2
h
. This computa-
tion would require up to h additional units for the tail
values. Therefore the total number of tail values is
H − h + h = H.
The above considerations allow us to formulate the
following
Theorem 3 A Merkle tree traversal can be imple-
mented in O(L) time with 2L hash operations. This
algorithm requires L2
h
+ 2H memory locations to
store hash values.
In the last Theorem we have ignored time neces-
sary to output the log n values per round. The re-
sult described in the abstract follows if we choose
h = log
(3)
n.
7 CONCLUSION
In this paper we describe the first optimal trade-off be-
tween time and space complexity of Merkle tree tra-
versals.
We believe it is possible to improve further the con-
stants in the described trade-off by differentiating be-
tween various types of nodes in our procedure.
Another interesting problem was described in
(Szydlo, 04): given space to store only S hash nodes,
what is the minimal number of hash computations per
round? (Szydlo, 04) proposes it in a combination with
(Jakobsson et al., 03) as a starting point of this inves-
tigation.
Yet another interesting problem is the complexity
of the traversal of the so-called skew (unbalanced)
Merkle trees (Karpinski, Nekrich, 04).
OPTIMAL TRADE-OFF FOR MERKLE TREE TRAVERSAL
281
REFERENCES
Coppersmith,D., Jakobsson,M., “Almost Optimal Hash Se-
quence Traversal”, Financial Cryptography, 2002,
102-119
Devanbu, P., Gertz, M., Martel,C., Stublebine, S. G., “Au-
thentic Third Party Data Publication” 14th IFIP Work-
shop on Database Security, 2000
Jakobsson, M., “Fractal Hash Sequence Representation and
Traversal”, ISIT, 2002, p. 437
Jakobsson, M., Leighton, T., Micali, S., and Szydlo, M.,
“Fractal Merkle Tree Representation and Traversal”,
RSA Cryptographers Track, RSA Security Confer-
ence, 2003.
Karpinski, M., Nekrich, Y., A Note on Traversing Skew
Merkle Trees, ECCC Report TR04-118.
Lipmaa, H “On Optimal Hash Tree Traversal for Optimal
Time Stamping”, Proc. Information Security Confer-
ence, 2002, LNCS 2433, 357-371.
Merkle, R., “Secrecy, Authentication and Public Key Sys-
tems”, UMI Research Press, 1982
Merkle, R., “A Digital Signature Based on a Conventional
Encryption Function”, Proc. Crypto 1987, 369-378.
Micali, S., “Efficient Certificate Revocation” , Technical
Report TM-542b, MIT Laboratory for Computer Sci-
ence, March 22, 1996
Micali, S., Rabin, M., Kilian, J., “Zero-Knowledge Sets”,
Proc. 44th FOCS, 2003, 80-91 .
Perrig, A., Canetti, R., Tygar, D., Song D., “ The TESLA
Broadcast Authentication Protocol” , Cryptobytes, vol
5, pp. 2-13. Available at
http://citeseer.nj.nec.com/
perrig02tesla.html
Rivest, R., Shamir, A., “PayWord and MicroMint - Two
Simple Micropayment Schemes”, CryptoBytes, vol.
1, pp. 7-11. Available at
theory.lcs.mit.edu/
∼rivest/RivestShamir-mpay.ps
Szydlo, M., “Merkle Tree Traversal in Log Space and
Time”, Proc. Eurocrypt 2004, LNCS 3027, 541-554.
APPENDIX
In this Appendix we give a pseudocode description
of the modified procedure Eval(A,k), A = ih. Recall
that first all descendants of (A, k) on level (i−1)h are
computed and computation of the m-th descendant
starts at time 2
ih
(k − 1) + 2
(i−1)h
m − m. Procedure
EvalBottom is algorithmically identical to procedure
Eval in section 3. That is, the same sequence of hash
computations is performed. Therefore all proofs in
section 4 remain valid if we use EvalBottom or Eval1
Eval1 (A,k)
i := A/h
if ( round = 2
ih
(k − 1) + 2
(i−1)h
m − m)
bottom[m] := \
EvalBottom(2
(i−1)h
, m+(k−1)2
h
)
EvalTop(A, k)
Figure 4: Procedure Eval1
instead of Eval . However the implementation pre-
sented here does not use recursion. Observe that vari-
ables T ail
lev
are global, i.e. common for all proce-
dures EvalBottom.
EvalBottom (A,k)
ind := 2
A
k
minlev := lev := 0
while (lev < A)
V := φ
1
(ind)
while (ind mod 2 = 1)
V := φ
2
(T ail
lev
, V )
lev := lev + 1
minlev := minlev + 1
ind := ind/2
T ail
lev
:= V
ind := (ind + 1)2
lev
minlev := lev := 0
EvalTop (A,k)
ind := 2
A
k
minlev := lev := 0
while (lev < A)
V := bottom[ind]
while (ind mod 2 = 1)
lef tind := 2
lev
ind
rightind := 2
lev
(ind + 1)
bottom[lef tind] := \
φ
2
(bottom[lef tind], bottom[rig h tind])
lev := lev + 1
minlev := minlev + 1
ind := ind/2
ind := (ind + 1)2
lev
minlev := lev := 0
Figure 5: Procedures EvalBottom and EvalTop
Procedure EvalTop(A,k) computes all odd nodes of
the height h subtree rooted in (A, k) if all descendants
of (A, k) on level (i−1)h are known. The pseudocode
is very similar to EvalBottom but EvalTop(A,k) works
in-place, i.e. with only a constant number of addi-
tional variables.
ICETE 2005 - SECURITY AND RELIABILITY IN INFORMATION SYSTEMS AND NETWORKS
282
