
KNOWLEDGE ACQUISITION MODELING THROUGH DIALOGUE
BETWEEN COGNITIVE AGENTS
Mehdi Yousfi-Monod, Violaine Prince
LIRMM, UMR 5506
161 rue Ada, 34392 Montpellier Cedex 5, France
Keywords:
Intelligent agents dialogue, tutoring systems , logical reasoning.
Abstract:
The work described in this paper tackles learning and communication between cognitive artificial agents.
Focus is on dialogue as the only way for agents to acquire knowledge, as it often happens in natural situations.
Since this restriction has scarcely been studied as such in artificial intelligence (AI), until now, this research
aims at providing a dialogue model devoted to knowledge acquisition. It allows two agents, in a ’teacher’
- ’student’ relationship, to exchange information with a learning incentive (on behalf of the ’student’). The
article first defines the nature of the addressed agents, the types of relation they maintain, and the structure and
contents of their knowledge base. It continues by describing the different aims of learning, their realization
and the solutions provided for problems encountered by agents. A general architecture is then established and
a comment on an a part of the theory implementation is given. Conclusion is about the achievements carried
out and the potential improvement of this work.
1 INTRODUCTION
This research aims at defining a set of algorithms for
knowledge acquisition through dialogue between arti-
ficial cognitive agents. By cognitive agents we mean
entities possessing knowledge as well as acquisition
and derivation modes. In other words, they are able
to capture knowledge externally, and to process and
modify it through reasoning. Moreover, agents are
characterized by one or several goals. As an artifi-
cial intelligence (AI) entity, each agent owns a knowl-
edge base and attempts to make it evolve either by
environment observation (reactivity) or by derivation
modes (inductive or deductive reasoning). However,
human beings as natural cognitive agents favor dia-
logue as another mean for knowledge revision. This
mean tends to consider another agent as a knowledge
source, and then to proceed to derivation (by reason-
ing). Further, the knowledge source could be ad-
dressed in order to test wether the acquisition process
has succeeded. In a nutshell, this is what happens in
tutored learning.
To simulate learning we have chosen a socratic
dialogue (’teacher’ - ’student’) where knowledge is
presented exclusively by means of a question-answer
mode of interaction. The ’student’ agent owns belief
revision mechanisms and all axioms allowing formal
reasoning. Being in the modeling process, we wished
not to overload dialogue difficulties with language in-
trinsic ambiguity (i.e. pure “natural language” prob-
lems) and thus specified a “keleton protocol”: mes-
sage data will be exchanged in first-order logic. How-
ever, this has been decided only to be able to focus
on dialogue particular features; we attempt, the best
we can, to make the dialogue situation as close to a
natural human-human dialogue between a ’teacher’
and a ’student’, as possible. We assume that agents
use a common formalism concerning terms, predi-
cates and functions. Nevertheless, the ’student’ agent
may not have predicates (or functions) given by the
’teacher’ agent and so can question it on this subject
before revising its base. In this paper, we try to show
how dialogue initiates reasoning, which leads to an
increase as well as a revision of the ’student’ knowl-
edge base according to hypotheses we simulate and
revision mechanisms we define.
201
Yousfi-Monod M. and Prince V. (2005).
KNOWLEDGE ACQUISITION MODELING THROUGH DIALOGUE BETWEEN COGNITIVE AGENTS.
In Proceedings of the Seventh International Conference on Enterprise Information Systems, pages 201-206
DOI: 10.5220/0002512002010206
Copyright
c
SciTePress

2 DIALOGUE AND LEARNING: A
BRIEF DESCRIPTION OF
RELATED LITERATURE
Several papers deal with human learning via dialogue
(DA 91). Those related to computer devices usu-
ally rely on human-machine dialogue models (Bak
94; Coo 00). However, for artificial agents only, the
very few papers about communication as an acquisi-
tion mode are in the framework of noncognitive envi-
ronment like robots (AMH 96) or noncognitive soft-
ware agents. It seems that, in artificial systems, learn-
ing is often realized without dialogue.
Learning without Dialogue. There are many kind of
learning methods for symbolic agents like reinforce-
ment learning, supervised learning (sometimes us-
ing communication as in (Mat 97)), without speaking
about neural networks models that are very far from
our domain. This type of learning prepares agents
for typical situations, whereas, a natural situation in
which dialogue influences knowledge acquisition, has
a great chance to be unique and not very predictable
(RP 00).
Dialogue Models. Most dialogue models in com-
puter science (namely in AI) are based on intentions
(AP 80; CL 92), rely on the Speech Act Theory (Aus
62; Sea 69), to define dialogue as a succession of
planned comunicative actions modifying implicated
agents’ mental state, thus emphasizing the importance
of plans (Pol 98). When agents are in a knowledge ac-
quisition or transfer situation, they have goals: teach
or learn a set of knowledge chunks. However, they
do not have predetermined plans: they react step by
step, according to the interlocutor’s answer. This is
why an opportunistic model of linguistic actions is
better than a planning model. Clearly, a tutored learn-
ing situation implies a finalized dialogue (aiming at
carrying out a task) as well as secondary exchanges
(precision, explanation, confirmation and reformula-
tion requests can take place to validate a question or
an answer). We have chosen to assign functional roles
(FR) to speech acts since this method, described in
(SFP 98), allows unpredictable situations modelling,
and tries to compute an exchange as an adjusment be-
tween locutors mental states. We have adapted this
method, originally designed for human-machine dia-
logue, to artificial agents.
Reasoning. Reasoning, from a learning point of view,
is a knowledge derivation mode, included in agent
functionalities, or offered by the ’teacher’ agent. Rea-
soning modifies the recipient agent state, through a set
of reasoning steps. Learning is considered as the re-
sult of a reasoning procedure over new facts or pred-
icates, that ends up in engulfing them in the agent
knowledge base. Thus, inspired from human behav-
ior, the described model acknowledges for three types
of reasoning: deduction, induction and abduction.
Currently, our system uses inductive and deductive
mechanisms. Abduction is not investigated as such,
since we consider dialogue as an abductive bootstrap
technique which, by presenting new knowledge, en-
ables knowledge addition or retraction and therefore
leads to knowledge revision (JJ 94; Pag 96).
Last, although our system is heavily inspired from
dialogue between humans and from human-machine
dialogue systems, it differs from them with respect to
the following items :
• Natural language is not used as such and a formal-
based language is prefered, in the tradition of lan-
guages such as KIF, that are thoroughly employed
in artificial agents communication. These formal
languages prevent problems that rise from the am-
biguity intrinsic to natural language.
• When one of the agents is human, then his/her
knowledge is opaque not only to his/her interlocu-
tor (here, the system) but also to the designer of the
system. Therefore, the designer must build, in his
system, a series of “guessing” strategies, that do not
necessarily fathom the interlocutor’s state of mind,
and might lead to failure in dialogue. Whereas,
when both agents are artificial, they are both trans-
parent to the designer, if not to each other. Thus,
the designer embeds, in both, tools for communi-
cation that are adapted to their knowledge level.
The designer might check, at any moment, the state
variables of both agents, a thing he cannot do with
a human.
These two restrictions tend to simplify the problem,
and more, to stick to the real core of the task, i.e.,
controlling acquisition through interaction.
3 THE THEORETICAL
FRAMEWORK
3.1 Agents Frame
Our environment focuses on a situation where two
cognitive artificial agents are present, and their sole
interaction is through dialogue. During this relation-
ship, an agent will play the role of a ’teacher’ and
the other will momentarily act as a ’student’. We as-
sume they will keep this status during the dialogue
session. Nevertheless, role assignation is temporary
because it depends on the task to achieve and on each
agent’s skills. The ’teacher’ agent must have the re-
quired skill to teach to the ’student’ agent, i.e., to offer
unknown and true knowledge, necessary for the ’stu-
dent’ to perform a given task. Conventionally, ’stu-
dent’ and ’teacher’ terms will be used to refer, respec-
tively, to the agents acting as such. The ’teacher’ aims
ICEIS 2005 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
202
at providing a set of predetermined knowledge to the
’student’. This, naturally subsumes that agents coop-
erate.
3.2 Knowledge Base Properties
Each agent owns a knowledge base (KB), structured
in first-order logic, so the knowledge unit is a formula.
The ’student’ can make mistakes, i.e., possess wrong
knowledge. From an axiomatic point of view, if an
agent acts as a ’teacher’ in relation to a given knowl-
edge set, then the ’student’ will consider as true every
item provided by the ’teacher’.
Each KB is manually initiated, however, its update
will be automatic, thanks to ’learning’ and reasoning
abilities. In order to simplify modelling, we only use
formulas such sa (P ), (P → Q) and (P ↔ Q). (P )
and (Q) are predicates conjunctions (or their nega-
tion) of type (p(A)) or (p(X)) (or (not(p(A))) or
(not(p(X)))), where A = {a
1
, a
2
, . . . , a
n
} is a set
of terms and X = {x
1
, x
2
, . . . , x
n
} a set of vari-
ables. For simplification sake, we note P and Q
such predicates conjunctions. Universal quantifica-
tion is implicit for each formula having at least one
variable. We consider that, to initiate learning (from
the ’student’ position), the ’teacher’ has to rely on the
’student’s previous knowledge. This constraint imi-
tates humans’ learning methods. Therefore, before
performing a tutored learning dialogue, agents must
have a part of their knowledge identical (called ba-
sic common knowledge). The ’teacher’ will be able to
teach new knowledge by using the ’student”s already
known one. However, our agents do not ’physically’
share any knowledge (their KBs are independent).
Connexity as a KB Fundamental Property. Dur-
ing learning, each agent will attempt to make its KB
as “connex” as possible.
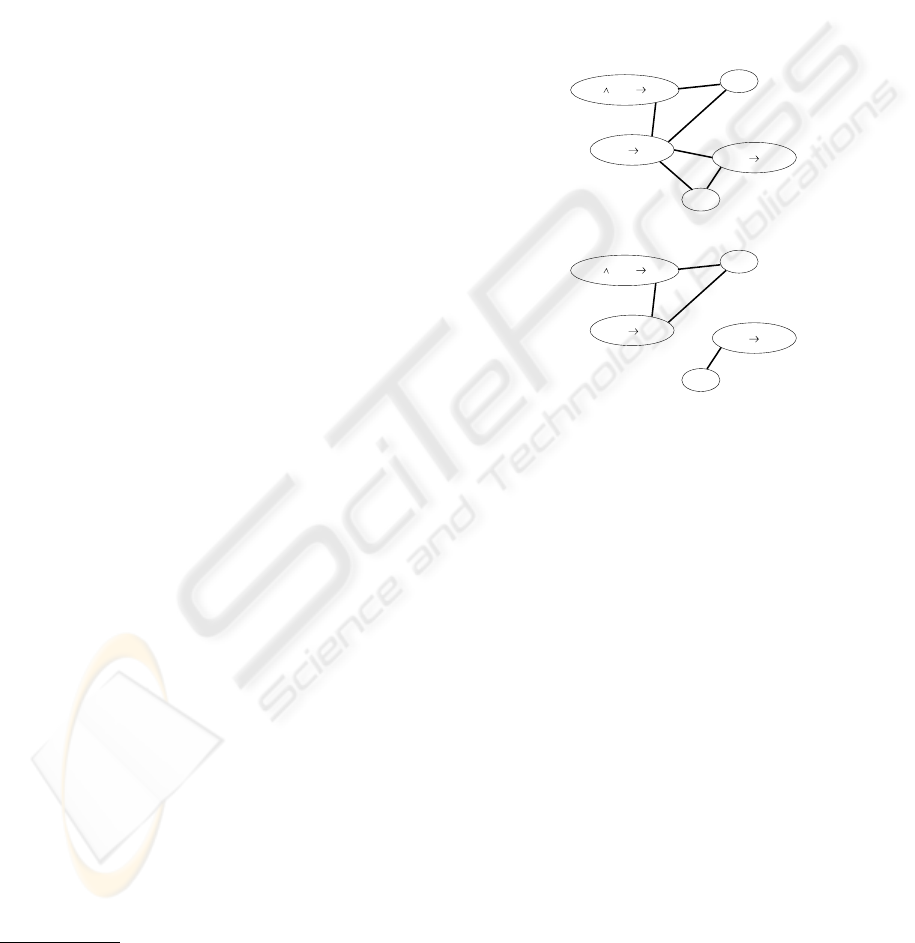
Definition 1. A KB is connex when its associated
graph is connex. A graph G
Γ
is associated to a KB Γ
as such:
Each formula is a node. An edge is created between
each couple of formulas having the same premise
or the same conclusion or when the premise of one
equals the conclusion of the other. For the mo-
ment, variables and terms are not took into account in
premise or conclusion comparison
1
. Thus, in a con-
nex KB, every knowledge element is linked to every
other, the path between them being more or less long.
As the dialogic situation must be as close as possi-
ble to a natural situation, agents’ KBs are not totally
1
An abductive reasoning mechanism is contemplated as
a possible mean to compare a constant fact q(a) with a pred-
icate with a variable q(y). We only consider the result of a
succeeding abduction.
connex: a human agent can often, but not always, link
two items of knowledge, haphazardly taken.
Examples:
A connex KB: Γ
1
= {t(z) ∧ p(x) → q(y),
r(x) → q(y), s(x) → r(y), q(a), r(b)}
A non connex KB: Γ
2
= {t(z) ∧ p(x) → q(y),
r(x) → q(y), s(x) → u(y), q(a), u(b)}
Definition 2. A connex component (or just compo-
nent) is a connex subset of formulas in a KB.
r(b)
s(x) r(y)
t(z) p(x) q(y)
q(a)
r(x) q(y)
(a) Γ
1
Associated Graph
t(z) p(x) q(y)
q(a)
s(x) u(y)
u(b)
r(x) q(y)
(b) Γ
2
Associated Graph
Figure 1: KB Associated Graphs
Figures 1(a) and 1(b) respectively represent graphs
associated to Γ
1
and Γ
2
.
Theorem 1. Let A, B and C be three connex for-
mulas sets. If A ∪ B and B ∪ C are connex then
A ∪ B ∪ C is connex.
Proof. Let us assume that A∪B and B∪C is connex
and G
A
, G
B
and G
C
are graphs respectively associ-
ated to A, B and C. According to definition 1: A ∪ B
connex is equivalent to G
A
∪G
B
connex. Also, B∪C
connex is equivalent to G
B
∪G
C
connex. And accord-
ing to connex graph properties: G
A
∪ G
B
connex and
G
B
∪ G
C
connex implies G
A
∪ G
B
∪ G
C
connex. So
A ∪ B ∪ C is connex.
Agents will not attempt to increase the number of
their connex components. However, there will be
some cases where the ’student’ will be forced to do
so. Fortunately, in some other cases, learning new
knowledge may link two connex components into a
new larger one, decreasing the components total num-
ber (according to theorem 1).
KNOWLEDGE ACQUISITION MODELING THROUGH DIALOGUE BETWEEN COGNITIVE AGENTS
203

3.3 Dialogue: Using Functional
Roles (FR)
A dialogue session is the image of a lesson. The
’teacher’ must know what knowledge to teach to the
’student’: therefore, a lesson is composed of several
elements, each of them contained in a logic formula.
The teaching agent provides each formula to the ’stu-
dent’. However, before that, the teacher waits for the
’student”s understanding (or misunderstanding) mes-
sage of the last formula. If the ’student’ doesn’t un-
derstand or is not at ease, it can just inform its in-
terlocutor of the misunderstanding or, requests a par-
ticular information bit. The FR theory, that models
exchanges in this dialogue, allows the attachment of
a role to each utterance. Both agents, when receiving
a message, know its role and can provide an adequate
answer. We assign the type knowledge to universal or
existential general logical formulas and the type in-
formation to constant-uttering answer (or question):
i.e, which value is ’true’, ’false’, or ’unknown’. Here
are the main FR types used in the our tutored learning
dialogue.
1. give-knowledge. Used to teach a knowledge and
introduce an exchange, example:
give − knowledge(cat(x) → mortal(x)):
“Cats are mortal.”
2. askfor/give-information (boolean evaluation case) :
askfor-information. Example:
askfo r − information(cat(F olley)):
“Is Folley a cat?”
give-information
. Example:
give − inf ormation(true): “Yes.”
3. give-explanation
(predicate case). Example:
give − explanation(cat(x) ↔
(animal(x) and pet(x) )): “A cat is a pet animal.”
4. say-(dis)satisfaction
: tells the other agent that the
last provided data has (has not) been well under-
stood.
There are some FR we do not use (askfor −
knowledge, askfor−explanation, askfor/give−
example, askfor/give−precision, askfor/give−
reformulation) likewise some specific uses like the
type askf or/give − inf ormation in the case of an
evaluation by a function. So FR are dialogic clauses
allowing the interpretation of exchanged formulas. A
functional role of the“ask − f or” kind implies one or
a series of clauses of the “give” type, with the possi-
bility of using another “ask − f or” type if there is a
misunderstanding. This case will bring about a clause
without argument: “say − dissatisfaction”. Only
“ask − for” type roles will lead to interpretative ax-
ioms. Other ones are behavioral startings.
3.4 Tutored Learning
3.4.1 Axioms
Our reasoning system is hypothetical-deductive, so it
allows belief revision and dialogue is the mean by
which this revision is performed. Two groups of ax-
ioms are defined: fundamental axioms of the system
and those corresponding to the FR interpretation in
the system. Each knowledge chunk of each agent is
seen as an assumption.
Fundamental axioms. Our system revision axioms
include the hypothetisation axiom, hypothesis addi-
tion and retraction, implication addition, implication
retraction or modus ponens and the
reductio ad absur-
dum rule
. These are extensively described in (Man
74).
FR interpretation axioms. Interpretation axioms are
not in the first order since they introduce clauses and
multiple values (like the “unknown” one). Our syntax
will be in the first order, but the interpretation is not
monotonous.
• give − knowledge(A) ⇒ A ⊢ T ;
any knowledge supplied by the teacher is consid-
ered as true.
• give − information(A) ≡ Aǫ[T, F, U ];
any supplied information is a formula interpretable
in a multi-valued space.
• give − explanation(A) ≡
(give − inf ormation(P ), A ↔ P );
any explanation consists in supplying a right for-
mula, equivalent to the formula A that has to be
explained.
With T for True, F for False and U for Unknown.
3.4.2 Tutored Learning Situations
Learning can have several goals like enriching the KB
with new data, increasing the KB connexity, widening
the predicates base, understanding why some formu-
las imply others. We mainly focus on the first one
because of its importance. In order to learn, the ’stu-
dent’ must first understand received data. By under-
standing, we mean “not increasing the KB compo-
nents number”: the ’student’ understands a data that
is linked to at least one component of its KB. By def-
inition, we consider that a ’student’ knows a predicate
if it owns it.
3.5 Dialogue Strategy
There are several dialogue strategies depending on the
goals chosen by the learner. In this paper, being lim-
ited in scope, we consider one goal: enriching the KB
with new data (while maintaining connexity as best as
ICEIS 2005 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
204
possible), because it is the commonest. Thus we sug-
gest the appropriate common strategy: solving a mis-
understanding problem by choosing adequate ques-
tions and answers. We have adopted a technique in-
spired from the socratic teaching method.
For each predicate p
i
to be taught, the ’teacher’ knows
another one p
j
linked with p
i
by an implication or
an equivalence F . Therefore, to ensure that the ’stu-
dent’ understands p
i
thanks to p
j
, he will have to ask
the ’student’ if the latter knows p
j
. If the ’student’
knows it, then the ’teacher’ only have to give F to the
’student’. Otherwise, the ’teacher’ will find another
formula that explains p
j
and so on. Once data is un-
derstood, the ’student’ may realize that some bits are
contradictory with its KB, leading to a conflict.
Conflict Management. We have studied several
types of conflict, those related to implications as well
as those related to facts. In this paper, we will only
present the first one, which typically takes place when
the ’student’ has a formula (P → Q) and attempts to
learn a formula (P → not(Q)). The solution, for
the ’student’, is removing (P → Q) from its KB and
adding (P → not(Q)). It acts so because we con-
sider that this is ’teacher”s knowledge (thus true)
and so it gets the upper hand on the ’student’ one
(first axiom). However, the conflict could be hidden
if the ’student’ has the next formulas: (P
1
→ P
2
),
(P
2
→ P
3
), ... , (P
n−1
→ P
n
) and attempts to learn
(P
1
→ not(P
n
)): the ’student’ has an equivalent to
the formula (P
1
→ P
n
). Instead of using a base-
line solution consisting in removing all the series of
implications, we opted for a more flexible one which
attempts to look for a wrong implication and only re-
move this one. Indeed, removing one implication is
sufficient to solve the conflict. The ’student’ will then
attempt to validate each implication to the ’teacher’
through an “askf or − information” request. As
soon as a wrong implication is found, the ’student’
removes it and safely adds the new one. However, if
none of the implications is neither validated nor re-
jected by the ’teacher’, the ’student’ will be forced to
remove all the series before adding the new one to
be sure to end up the conflict. We have studied other
implication conflict types that are even less easily de-
tectable, but we have not a sufficient space to detail
them.
4 SYSTEM ARCHITECTURE
AND IMPLEMENTATION
The theoretical approach of section 3 has been spec-
ified and partially implemented. The specification is
general, the implementation contains some of its ele-
ments presented in section 4.2.
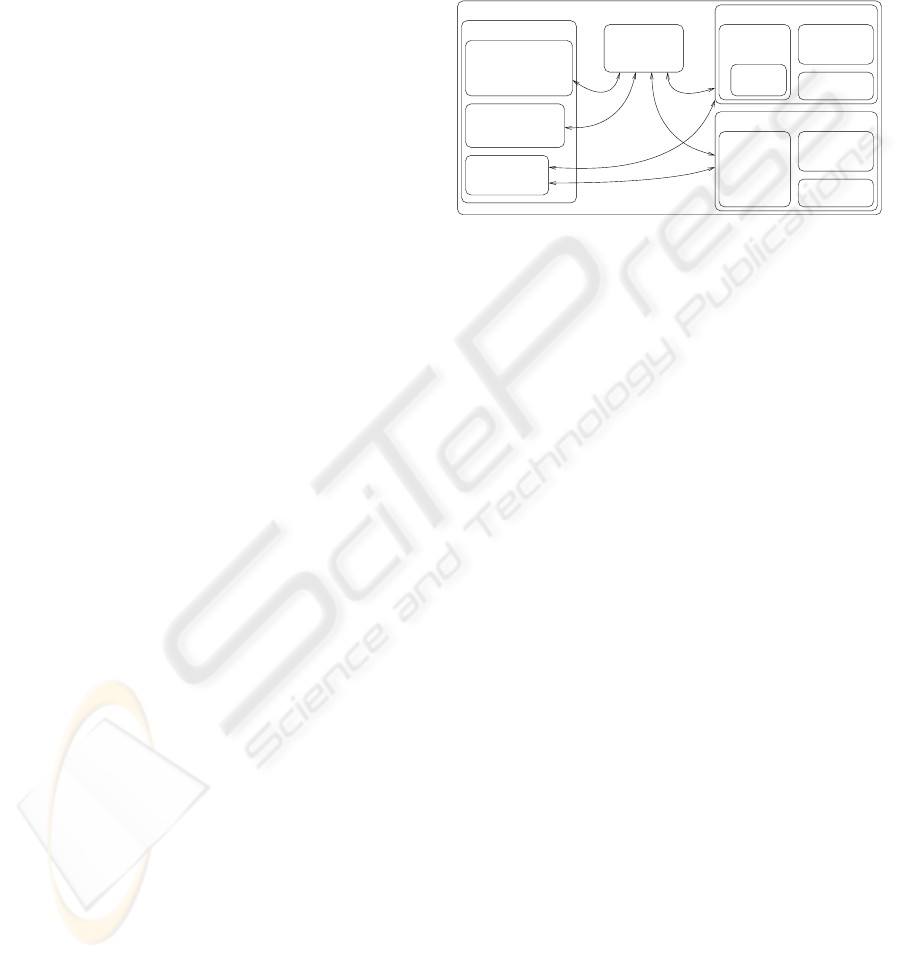
4.1 Architecture
The figure 2 displays the main architecture elements
of our tutored learning system. It is composed of five
main structures: the ’teacher’, the ’student’, the FR,
the strategies and the ’World’. Each agent has a KB,
a model of itself and of its interlocutor. It can freely
...
Dialogue :
...
World
Strategies
Explain a predicate
Explain an implication
Local:
Conflicts management
Lessons :
Learning
Teaching
Student Agent
Knowledge
base
Knowledge
base
Lesson to
be taught
Teacher Agent
Model of oneself
Model of oneself
Roles
Functional
Teacher’s Model
Student’s Model
Figure 2: The tutored learning system through dialogue be-
tween artificial cognitive agents
update them in order to make them evolve. It has an
access to strategies, for learning and teaching lessons
and to all the FR rules (seen in section 3.3).
4.2 Implementation
We have implemented a Java program to test conflict
solving. This programm is a basic prototype aiming
at getting experimental results of a part of our theory.
Each agent is an instance of the Thread Java class and
has a name, a knowledge base (KB) and a pointer to
• a World class (the environment at which it be-
longs),
• its possible teacher, student and interlocutor agents,
• the strategies class,
• the fonctional roles (FR) class.
The KB is made of two types of simple objects: facts
(a predicate name and a term) and implications (two
predicate names, two variables and a direction). An
exchanged message is one entry of the KB (a fact or
an implication) plus a FR type. Strategies are meth-
ods defining sequential actions to perform in order
to accomplish the specific asked strategy. They can
be used directly by the agent (for lesson teaching for
example) or they can by called by their FR compo-
nent (for predicate explanation implied by a “say-
dissatisfaction” for example). The FR component is
a switch that routes the agent message to the good FR
method according to its FR type. Each FR method
uses the adequate strategies to satisfy agents.
Running the process shows that the ’student’ has
detected a conflict between its KB and a new data pro-
vided by the ’teacher’. He then asks the ’teacher’ to
KNOWLEDGE ACQUISITION MODELING THROUGH DIALOGUE BETWEEN COGNITIVE AGENTS
205

validate some potentially conflictual knowledge and
finally removes the wrong implication
2
.
5 CONCLUSION
Our system allows artificial cognitive agents, in a tu-
tored learning situation between a ’teacher’ and a ’stu-
dent’, to acquire new knowledge through sole dia-
logue. The study of such a constraint has led us to
define a notion of
connexity
for a knowledge base
(KB), allowing to assess the connection level be-
tween each element of knowledge of an agent and
so to give it a new goal: increasing its KB connex-
ity. As the dialogue situation in highly impredictable
and may follow no previous plan, we have adopted
the functional role theory to easily model dialogical
exchanges. Agents use strategies to learn new knowl-
edge and solve conflicts between external and internal
data. (Ang 88) tackles the problem of identifying an
unknown subset of hypothesis among a set by queries
to an oracle. Our work differs mainly in the commu-
nication mean: we use imbricated dialogues instead
of queries; and in the learning’s aim: our agents aim
at learning new formulas and increasing their KB con-
nexity instead of identifying hypothesis.
This work is a first approach in learning by dia-
logue for cognitive artificial agents. Its aim is to de-
fine a set of requirements for an advanced communi-
cation. Some paths could be explored like enriching
the KB content by new formula types or defining new
dialogue strategies. Last, this type of learning could
be used in complement with others that rely on inter-
action with environment, in order to multiply knowl-
edge sources.
REFERENCES
D. Angluin: Queries and Concept Learning, Machine
Learning, Volume 2, Issue 4, ISSN:0885-6125,
Kluwer Academic Publishers, Hingham, MA, USA,
319-342, 1988.
H. Asoh, Y. Motomura, I. Hara, S. Akaho, S. Hayamizu, T.
Matsui: Acquiring a probabilistic map with dialogue-
based learning, In Hexmoor, H. and Meeden, L., ed-
itors, ROBOLEARN ’96: An Intern. Workshop on
Learning for Autonomous Robots, 11-18, 1996.
J. Allen, R. Perrault: Analyzing intention in utterances, Ar-
tificial Intelligence, 15(3), 143-178, 1980.
J.L. Austin: How to Do Things with Words, ed. J. O. Urm-
son and Marina Sbis, Cambridge, Mass: Harvard Uni-
versity Press, 1975.
2
Implementation details are reachable at
http : //www.lirmm.fr/ ∼ yousf i
M. Baker: A Model for Negotiation in Teaching-Learning
Dialogues, Journal of Artificial Intelligence in Educa-
tion, 5, (2), 199-254, 1994.
P. Cohen, H. Levesque: Intentions in Communication, Ra-
tional Interaction as the Basis for Communication.
Bradford Books, MIT Press, seconde dition, chap. 12,
1992.
J. Cook: Cooperative Problem-Seeking Dialogues in Learn-
ing, In G. Gauthier, C. Frasson and K. VanLehn (Eds.)
Intelligent Tutoring Systems: 5th International Con-
ference, ITS 2000 Montreal, Canada, June 2000 Pro-
ceedings, Berlin Heidelberg New York: Springer-
Verlag, 615-624, 2000.
S.W. Draper, A. Anderson: The Significance of Dialogue
in Learning and Observing Learning, Computers and
Education, 17(1), 93-107, 1991.
J.R. Josephson, S.G. Josephson: Abductive Inference, Com-
putation, Philosophy, Technology, New York, Cam-
bridge University Press, 1994.
Z. Manna: Mathematical Theory of Computation, Interna-
tional ’student’ Edition. McGraw Hill Computer Sci-
ence Series, 1974.
M. Mataric: Using Communication to Reduce Locality in
Multi-Robot Learning, AAAI-97, Menlo Park, CA:
AAAI Press, 643-648, 1997.
M. Pagnucco: The Role of Abductive Reasoning Within the
Process of Belief Revision, Ph.D. thesis, University of
Sydney, 1996.
M. E. Pollack: Plan Generation, Plan Management, and
the Design of Computational Agents Proceedings of
the 3rd International Conference on Multi-Agent Sys-
tems, Paris, France, July, 1998.
A. Ravenscroft, R.M. Pilkington: Investigation by Design:
Developing Dialogue Models to Support Reasoning
and Conceptual Change, International Journal of Ar-
tificial Intelligence in Education, 11, (1), 273-298,
2000.
J. Searle: Speech Acts: An Essay in the Philosophy of
Language, Cambridge: Cambridge University Press,
1969.
G. Sabah, O. Ferret, V. Prince, A. Vilnat, S. Vosniadou, A.
Dimitrakopoulo, E. Papademetriou: What Dialogue
Analysis Can Tell About Teacher Strategies Related
to Representational Change, in Modelling Changes in
Understanding: Case Studies in Physical Reasoning,
Elsevier, Oxford., 1998.
ICEIS 2005 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
206
