
Data Mining Based Diagnosis in Resource Management
Mathias Beck
1
and Jorge Marx G
´
omez
2
1
Technical University of Clausthal, Germany
2
Otto-von-Guericke-Universit
¨
at, Magdeburg, Germany
Abstract. There are different solutions to resource allocation problems in Re-
source Management Systems (RMS). One of the most sophisticated ways to solve
these problems is an adjustment to Quality-of-Service (QoS) settings during run-
time. These settings affect the trade-off between the resource usage and the qual-
ity of the services the executed tasks create. But, to be able to determine the
optimal reactive changes to current QoS settings in an acceptable time, knowl-
edge of the resource allocation problem’s cause is necessary. This is especially
significant in an environment with real-time constraints. Without this knowledge
other solutions could be initiated, still an improvement to the current resource
allocation, but the optimal compromise between resource requirements and QoS
is likely to be missed. A resource management system (RMS) with the ability to
adjust QoS settings can solve more resource allocation problems than one pro-
viding reallocation measures only. But problem-depending only optimal changes
to QoS settings can solve the problem within timing constraints and thus prevent
expensive system failures. Depending on the environment a RMS is used in, the
failures could be a huge financial loss or even a threat to human lives. But the
knowledge of a problem’s cause does not only help to solve the problem within
existing timing constraints and to guarantee feasibility of the executed tasks, but
helps to maximize the quality of the generated services as well. To detect upcom-
ing problems in time, forecasting mechanisms can be integrated into the RMS.
They can predict a problem in the near future, early enough for the system to re-
act. For diagnosis of resource management problems, data mining can be applied
to determine the cause of an allocation problem. The techniques implemented in
this work are the k-nearest neighbor analysis and decision trees. Both techniques
will make their predictions based on prior created resource allocation snapshots
referring to problem cases with known cause.
1 Introduction
There are different solutions to resource allocation problems in Resource Management
Systems (RMS). One of the most sophisticated ways to solve these problems is, if sup-
ported by the RMS, an adjustment to Quality-of-Service (QoS) settings during runtime.
These settings affect the trade-off between the resource usage and the quality of the
services the executed tasks create. But, to be able to determine the optimal reactive
changes to current QoS settings in an acceptable time, knowledge of the resource al-
location problem’s cause is necessary. This is especially significant in an environment
Beck M. and Marx Gómez J. (2005).
Data Mining Based Diagnosis in Resource Management.
In Proceedings of the 5th International Workshop on Pattern Recognition in Information Systems, pages 177-185
DOI: 10.5220/0002534801770185
Copyright
c
SciTePress

with real-time constraints. Without this knowledge other solutions could be initiated,
still an improvement to the current resource allocation, but the optimal compromise be-
tween resource requirements and QoS is likely to be missed. A resource management
system (RMS) with the ability to adjust QoS settings can solve more resource alloca-
tion problems than one providing reallocation measures only. But problem-depending
only optimal changes to QoS settings can solve the problem within timing constraints
and thus prevent expensive system failures. Depending on the environment a RMS is
used in, the failures could be a huge financial loss or even a threat to human lives. “The
real-time and reliability constraints require responsive rather than best-effort metacom-
puting.” ([2]) In general problems in a RMS arise whenever over-load or under-load on
an attached node occurs. Under-load occurs when the current resource usage falls below
a certain minimum usage. This simply results in a high idle time and indicates potential
for optimization. If other hosts are much busier or new tasks are waiting to be assigned
to a computing node a resource reallocation can improve the overall performance. In
case of a QoS aware RMS under-load could also, if necessary or possible, trigger an in-
crease in the currently executed task’s QoS level. Overload is a problem indicating that
the resources are currently operating close to their maximum capacity. If other nodes
in the RMS still operate with higher idle times, a resource reallocation might be able
to solve the problem. If all hosts are operating close to their capacity limits, a decrease
of the currently executed task’s QoS level can improve the systems condition. While
unsolved overload problems in a timing insensitive environment only result in longer
response times, the effects in a real-time environment are more severe. In case of QoS
aware RMS overload indicates that the current QoS level might not be feasible any-
more in the near future and that the QoS level has to be reduced. If overload problems
in a real-time environment can not be solved, timing sensitive deadlines of one or more
tasks in the systems can be missed. Violating the timing constraints of a real-time ap-
plication system can, especially in case of military defense systems or aviation control
systems, result in very costly system failures. To prevent these violations it is important
that the available resources are allocated in a way meeting all task deadlines that would
result in an immediate system failure when missed. To detect upcoming problems in
time, forecasting mechanisms can be integrated into the RMS. They can predict a prob-
lem in the near future, early enough for the system to react. To determine the cause of
resource allocation problems or forecasted problems a technique already successfully
applied to multiple business-related problems and in [4] to resource performance analy-
sis can be used: data mining. The techniques implemented in this work are the k-nearest
neighbor analysis and decision trees. Both techniques will make their predictions based
on prior created resource allocation snapshots referring to problem cases with known
cause. Once the cause of a resource allocation problem is determined, this knowledge
can help to choose the optimal measures to solve the problem. Different solutions to a
resource allocation problem are possible, thus the optimal one can be hard to determine
without knowledge of the problem’s cause. A sub-optimal solution is not sufficient for
all computing environments, RMS operating under real-time constraints while optimiz-
ing QoS attributes relies on optimal solutions rather than first-fit measures. Once the
cause of a resource allocation problem has been determined, it can be used to limit the
number of possible countermeasures to those who actually could help to solve the spe-
178

cific problem. The reduction to relevant solutions helps a QoS aware RMS to decide
which service attributes to modify while still providing an optimal QoS level. Depend-
ing on the number of solutions known to the RMS, the reduction of alternative solutions
also strengthens the real-time applicability. This performance improvement benefits the
timing constraints in a real-time environment, requiring fewer solutions to be evaluated.
2 Requirements and Specifications
The resource management architecture QARMA, introduced in [3], consists of three
major components: a System Repository Service (SRS), a Resource Management Ser-
vice and an Enactor Service. The SRS stores both static and dynamic information con-
cerning resource usage and software systems in the computing environment. Static in-
formation is known a priori and includes attributes like the number of available process-
ing nodes or service replicas. Dynamic information is concerning the current state of
the resources, often referred to as a snapshot, and includes monitor data measuring
resource usage, resource availability, application performance and environmental con-
ditions. To support the QARMA resource management service during the decision mak-
ing, a QoS problem diagnosis component can be integrated in the functional structure
of QARMA. This component analyzes resource allocation problems in order to deter-
mine their cause. The discovered knowledge enables QARMA to make more effective
decisions, finding the optimal reactive measures faster and with increased accuracy. The
knowledge of a problems cause helps to limit the number of possible countermeasures
to those who actually fit the specific problem. The decreased set of possible solutions
makes it easier for the decision-making component of QARMA to choose the optimal
reaction and thus to provide longer-lasting solutions with a maximum level of QoS. A
sub-optimal solution is not sufficient for all computing environments. Operating under
real-time constraints and maximizing the QoS level provided by active tasks, QARMA
relies on optimal countermeasures rather than first-fit measures. In addition QARMA
can take benefit from the performance improvement, requiring fewer reactive measures
to be evaluated for each problem. Whenever a detector discovers or predicts a violation
to existing real-time constraints, it will invoke the QoS problem diagnosis component.
Based on a snapshot of the current resource allocation, this module determines the exact
cause of the problem. This information can be used by QARMAs resource management
service to choose the optimal reactive measures for each problem. In general the QoS
problem diagnosis component is independent of a specific technique used to determine
the cause of a resource allocation problem. In this work a data mining module will be
utilized by the diagnosis component to analyze the problem data.
3 A Data Mining Approach
To prove the aptitude of data mining to be used by the QoS problem diagnosis compo-
nent, two according to [5] and [1] very common data mining techniques are applied to
the resource allocation problems: the k-nearest neighbor technique and decision trees.
Among the most common techniques, these two seem to be the most promising ap-
proaches to support the decision-making process of QARMA. They are not intended to
179

be the perfect choice out of all existing data mining techniques, but suitable to prove the
aptitude of data mining for the given problem. The nearest neighbor technique makes
a prediction based on distance between objects, in this case between snapshots of the
training data and the one of the unclassified problem. Due to the identical layout of
training data and the snapshot of the unclassified problems resource allocation and due
to their restriction to numerical values only, a calculation of the distance is very simple.
Each resource allocation can be seen as a point in a multi-dimensional vector space with
one dimension for each resource attribute. While a graphical illustration of these points
is impossible, the mathematical calculation of the distance between them is simple. It
can be determined with the Euclidean distance metric shown in equation 1.
d
ab
=
v
u
u
t
N
X
i=1
|x
ai
− x
bi
|
2
d
ab
: distance between two points a and b
N : Number of predictors
(1)
For cause detection every resource attribute is equally important. Therefore it has to
be prevented that attributes with large values outweigh ones with small values. This is
done by normalizing the input values to lie in an equal interval for all attributes. Since
all values in the system repository are positive, the interval [0,1] makes most sense. This
normalization can be done with a linear transformation of all input values, the min-max
normalization defined in equation 2.
x
′
= x ·
1
max
in
− min
in
x : input value
x
′
: output value
min
in
: lowest input value
max
in
: highest input value
(2)
Without the normalization a 5 percent different amount of free memory would be rated
much more important than the same difference for one of the load values. After the
preprocessing of the input data is finished, the distance between each snapshot of the
training data and the unclassified problem is calculated. Basing the prediction only on
the one very closest match of the training data can case-dependent be too inaccurate.
Thus the k closest records are taken into account for a prediction, usually k between 9
and 15 return much better predictions. But it is important that k matches the number
of records in the training set and is not chosen too high. Otherwise the accuracy of the
prediction will be reduced by too strong influences of records with other causes. Other
than the k-nearest neighbor technique the decision tree prediction works with a prior
created classifier model. Based on the training data, simple conditional rules are dis-
covered. These rules separate groups of records with identical problem causes of the
remaining group of unclassified records. The rule discovery algorithm tries to find at-
tributes within the training data, which only have records with an identical cause above
180

or below a certain value for the attribute. A rule does not have to separate all records of
a cause, the cause of the separated group might reoccur in the unclassified part of the
training data or in other rules. The group of records classified by a rule is only restricted
to a single cause. Searching for these rules, the algorithm tries to find the most signif-
icant ones, separating the biggest groups, first. The algorithm stops looking for further
rules when only a single cause is left in the unclassified part of the training data. Once
the rules are discovered, they can be used over and over again to predict the cause of
an upcoming resource allocation problem. Given a suitable training set, decision trees
return very accurate predictions. Since the predictions are made only based on the prior
discovered rules, the performance of the prediction is rather independent of the amount
of training records. The performance is only influenced by a limited number of rules.
Thus decision trees are a very suitable approach even under the timing constraints of
a real-time environment. The implementation of the decision tree technique consists
of two different components. The first one searches the database for rules separating
records of the database in groups with an identical cause. The second component pre-
dicts the cause of an unclassified problem by applying the resource usage snapshot to
these rules. The big advantage of this separation with respect to performance issues is
the fact, that the computation intensive rule discovery only has to be done once and
that the discovered rules can be used over and over again by the prediction component.
This provides a major performance improvement compared to techniques based on the
complete training data.
4 Experimental Results
To prove the aptitude of the developed data mining module to be used in the QoS prob-
lem diagnosis component, and thus the aptitude of data mining in general, two different
experiments were performed. The first experiment was set up to analyze the accuracy of
the two implemented data mining techniques. It was used to determine the aptitude of
the techniques to be used for problem diagnosis independent of their required execution
time. The second experiment was set up to analyze the performance of the predictions in
dependence of the amount of training data. The results of this experiment were used to
determine how suitable the two data mining techniques are for a real-time environment.
The dependence of the size of the training set is important, because the accuracy of the
predictions made depends on the size of the training set. All experiments were repeated
several times on a machine with a Pentium IV 2.4GHz CPU and 512MB RAM running
under Knoppix Linux 3.3 or Knoppix Linux 3.4 respectively. Prior to both experiments
the training data was created by deliberately causing resource allocation problems in
QARMA and collecting the affiliated resource usage information. For each cause mul-
tiple SRS snapshots and their causes were stored. The biggest part of these snapshots
was used as training data, providing the data mining techniques with resource usage
information of classified problems. The remaining records were provided to the data
mining techniques as unclassified problems without their known cause. To be correct,
a predicted cause had to be equal to the real cause of these snapshots. The experiments
regarding the accuracy of the predictions made by the two implemented data mining
techniques were performed for the biggest part with small databases. Later the database
181

size was increased to capture possible dependencies between the accuracy of a predic-
tion and the size of the training set. The minimum database size was 50 records; the
maximum size was 500 records. The experiments were repeated multiple times using
Knoppix 3.3 and Knoppix 3.4 as operating environments. Other than the results of the
performance experiments, the ones concerning the accuracy of the chosen techniques
were identical for both operating systems as expected. Thus neither average values are
presented nor can a comparison of the predictions made under different operating sys-
tems be made. To evaluate the predictions made by the two data mining techniques, the
predicted cause of each applied resource allocation snapshot was compared to the real
cause the snapshot was created with. A prediction was deemed accurate, if it was either
equal to the known cause or in case of the k-nearest neighbor technique was at least
returned with a significant higher probability than all other causes. The performance
experiments were set up with database sizes between 50 and 100.000 records. While
the smaller databases contained each prior created training record only once, the bigger
databases consisted of multiple copies of these records. This was easier than to manu-
ally create 100.000 problem records and still is a suitable setup since the performance
depends on the database size only. The performance is determined by the number of
records to be analyzed by the data mining algorithms, but not by reoccurrences in their
content. The experiments were performed several times under Knoppix Linux 3.3 and
Knoppix Linux 3.4. To determine the performance of an implemented data mining tech-
nique, the execution time of a prediction was measured using the Linux command time.
For each technique, each database size and each operating system the experiments were
repeated several times. After collecting the execution times for each combination of
the three factors above, the average execution time of these combinations was calcu-
lated to determine the performance. The k-nearest neighbor prediction was tested with
k={1,3,5,8,10,15} to determine if the size of k also influences the performance. The
values for k were chosen to range from very low values to those offering the high-
est accuracy. With one exception the execution time needed to predict the cause of an
unclassified resource allocation problem turned out to be independent of the chosen k.
When executed under Knoppix 3.4 a prediction with k=1 performed significantly slower
than all other k. Since the accuracy of a prediction with k=1 is lower than one with a
higher k, this result has not been further investigated. For all other k the execution times
are very similar among those with identical database size and operating system. The
independence of the value k has a simple explanation. The most time consuming part of
a prediction is the distance measurement between the resource usage of each database
record and the unclassified problem. These calculations require almost the complete
execution time. The time needed for the comparisons of the calculated distances to
the temporary optima is insignificantly small. Thus a real difference in execution time
for different k can not be measured. Figure 1 shows the performance graphs of the k-
nearest neighbor prediction for execution under Knoppix 3.4. The execution times for
the different k are with exception for k=1 so similar that a visual difference between the
different k can not be determined. The execution times have a linear relation to the size
of the database the k-nearest neighbor prediction is based on. Thus the time complexity
of this approach is O(n)=n. Due to the results of the accuracy experiments and the lin-
ear time complexity the k-nearest neighbor prediction is a very suitable technique for
182

Fig.1. Performance graph of the k-nearest neighbor prediction (Knoppix 3.4)
resource management environments operating without timing constraints. The fact that
they operate without a prior created classifier model has the advantage that the training
set needs less preparation while still making accurate predictions. The cause of resource
allocation problems that do not perfectly fit the training data can be determined in the
diagnosis nevertheless. But depending on the number of possible problems in the en-
vironment the resource management system is used in, the database needs to be rather
large to store enough training records to make accurate predictions possible. Resulting
in longer execution times, this makes the k-nearest neighbor prediction only in connec-
tion with small-scale databases suitable for an application in a real-time environment.
The multiple-second execution time needed in a 100.000 record database is inappropri-
ate for such an environment. The experiments measuring the decision tree performance
have been executed in two steps. First a classifier model has been created based on
the prior created training data. After the model had been build, the discovered rules
have been used by the decision tree prediction component to determine the cause of
the unclassified problem. Surprisingly the execution times of the rule discovery process
under Knoppix 3.3 and Knoppix 3.4 turned out to be quite different. Especially under
Knoppix 3.3 the creation of the classifier model was very slow, thus only up to 10.000
database records were used for the performance experiments under this operating sys-
tem. The rule discovery process performed significantly better under Knoppix 3.4. The
cause for these performance differences is expected to be the improved mySQL version
provided by Knoppix 3.4. But since the performance of the rule discovery process is
less important for a feasible usage of the decision tree technique in the QoS problem
diagnosis component, this result has not been further investigated. Figures 2 and 3 show
the performance graphs of the decision tree rule discovery process for Knoppix 3.3 and
Knoppix 3.4 respectively. Other than the performance of data analysis done during the
k-nearest neighbor prediction, the performance of this component differs significantly
between the two operating systems. Under Knoppix 3.3 the rule discovery process has
a clear polynomial increase in the execution time with respect to the database size. The
creation of the decision tree classifier model has time complexity O(n)=n
2
. For large
databases the performance of the execution time needed for the rule discovery process
under Knoppix 3.4 is in almost linear relation to the size of the database. Only for small
databases with less than 1.000 records the relation turned out to be polynomial. Due to
the range of records used for the experiments figure 3 only can visualize the linearity of
this relation. Even though the time complexity for smaller training sets is quadratic, it
almost reaches O(n)=n for larger scaled databases. The execution time of the decision
tree prediction takes constant 2 milliseconds and is independent of the database size.
The time complexity of this component’s execution is O(n)=1 and thus performing very
183
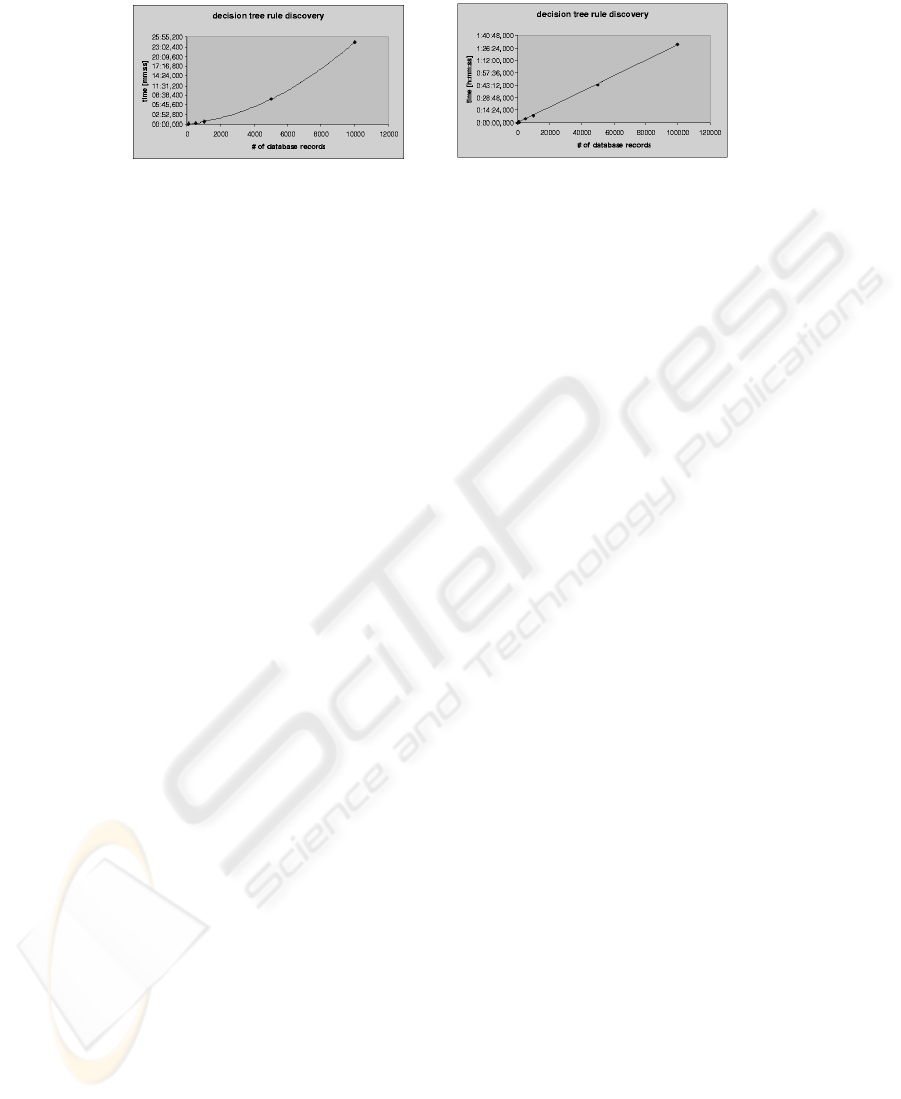
Fig.2. Performance graph of the deci-
sion tree rule discovery (Knoppix 3.3)
Fig.3. Performance graph of the deci-
sion tree rule discovery (Knoppix 3.4)
well. The performance experiments have proven decision trees to be a very suitable
technique to be used by the QoS problem diagnosis component to predict the cause of
an resource allocation problem. The polynomial time complexity of the rule discovery
process is no drawback for the aptitude of this technique. This step is required only
once and not suspect to any timing constraints. Thus the long execution times of this
component are justified, if the created classifier model can be used to make accurate
predictions. Although the accuracy experiments have proven that either carefully pre-
pared or extensive training sets are required to create an accurate classifier model, this
does not contradict with the aptitude of the prediction to be used even in a real-time
environment. The constantly fast execution time makes predictions with this technique
feasible even for very timing sensitive environments. Thanks to the execution time be-
ing independent of the database size, the training set can be chosen large enough for
an accurate model creation. Both data mining techniques implemented and analyzed
in these experiments have proven to be suitable and accurate approaches to diagnose
resource allocation problems. The k-nearest neighbor technique is not based on a prior
created classifier model. This has the advantage that this technique is less demanding
with respect to the provided training set. This approach makes accurate predictions even
with a less careful prepared training set possible. On the other hand the linear complex-
ity of the execution time restricts this technique to either a limited training set size or
an environment with weaker timing constraints. If only a very limited number of prob-
lems can occur in the environment, the database can be kept small enough to comply
with real-time requirements. For timing sensitive environments with numerous possible
problem causes, decision trees are a better approach. The decision tree prediction is
based on a prior created classifier model. This has the advantage that the time needed
for a prediction is independent of the size of the training set and thus performing signifi-
cantly better that a technique taking the whole training set into account for a prediction.
Due to the constant time complexity of the prediction, this approach is feasible even
under strong timing constraints.
5 Conclusion
This work introduced a QoS problem diagnosis component for Ohio University’s real-
time resource management system QARMA. For this problem diagnosis component a
data mining module has been developed to determine a resource allocation problem’s
cause and to prove the aptitude of business informatics techniques to successfully sup-
184

port resource management. The performed experiments could verify data mining’s ap-
titude in general and the single techniques’ aptitude in specific. But the experimental
results have also been able to show the techniques’ limitations and their requirements
to be able to make accurate predictions. While the k-nearest neighbor technique is a
good choice for RMS operating without timing constraints, it is not the best choice
for problem diagnosis in a real-time environment due to performance issues. Decision
trees on the other hand are performing well enough to be applied to resource allocation
problems in a resource management environment with timing constraints. But due to
its tendency to over-fit the training data, this technique turned out to be very demand-
ing to the training set. A rather large training set has to be carefully prepared to enable
the decision tree rule discovery process to create an accurate classifier model. But with
suitable training data, decision trees turned out to be a very fast and accurate prediction
technique. The proposed QoS problem diagnosis component is expected to optimize the
choice of reactive measures to resource allocation problems. Knowledge of a problem’s
cause can limit the number of possible reactions in general and further restrict their
number to good or optimal choices in specific. This reduces the time needed to find
the optimal reaction to each problem, which can not only solve the resource allocation
problem, but also provides the highest QoS level possible. Thus the problem diagnosis
component is expected to help to optimize the QoS level at which a real-time RMS can
operate and to support adjustments to QoS settings during runtime. But the expected
possibilities for QoS optimization are not only of importance for resource management
alone. Especially business application systems that work under timing constraints and
allow QoS adjustments to their tasks can take great benefit of the QoS optimization.
For example video solutions like VoD systems or video conferencing solutions would
be able to constantly provide the highest lag-free QoS level possible at each moment,
while still being able to satisfy all clients. This QoS optimization would be an important
cornerstone to the success of such a business application system. In a B2C environment
this optimization could be a crucial part of a VoD system needed to gain a competitive
advantage over other similar services. Thus the problem diagnosis is not only expected
to help to constantly optimize QoS settings during runtime, but could also be of signif-
icant influence on the economic success of commercial services based on a QoS aware
RMS like QARMA.
References
1. BERSON, A., SMITH, S. and THEARLING, K. (1999): Building Data Mining Applications
for CRM. New York, NY, U.S.A.
2. BESTAVROS, A. (1996): Middleware Support for Data Mining and Knowledge Discovery in
Large-scale Distributed Information Systems. Proceedings of ACM SIGMOD’96 Data Min-
ing Workshop
3. FLEEMAN, D. and WELCH, L. et al. (w/o year): Quality-based Adaptive Resource Manage-
ment Architecture (QARMA): A CORBA Resource Management Service. Ohio University,
Athens, OH, U.S.A.
4. IMBERMAN, S. (2002): The KDD process and data mining for performance professionals.
Journal of Computer Resource Management, issue 107, p. 68-77
5. KDNUGGETS (2003): Poll: Data Mining techniques
http://www.kdnuggets.com/polls/2003/data mining techniques.htm 08/21/04
185
