PREDICTING THE PERFORMANCE OF DATA TRANSFER
IN A GRID ENVIRONMENT
A predictive framework for efficient data transfer in a Grid environment
A.B.M. Russel, Savitri Bevinakoppa
School of Computer Science & Information Technology,
Royal Melbourne Institute of Technology (RMIT) University,
GPO BOX 2476V, Melbourne, Victoria-3001, Australia
Keywords: Performance prediction heuristics, Data transfer, Node selection, Grid environment, Globus, GridFTP, NWS
Abstract: In a Grid environment, implementing a parallel algorithm for data transfer or multiple parallel jobs
allocation doesn’t give reliable data transfer. There is a need to predict the data transfer performance before
allocating the parallel processes on grid nodes. In this paper we propose a predictive framework for
performing efficient data transfer. Our framework considers different phases for providing information
about efficient and reliable participating nodes in a computational Grid environment. Experimental results
reveal that multivariable predictors provide better accuracy compared to univariable predictors. We observe
that the Neural Network prediction technique provides better prediction accuracy compared to the Multiple
Linear Regression and Decision Regression. Proposed ranking factor overcomes the problem of considering
fresh participating nodes in data transfer.
1 INTRODUCTION
A Grid environment is a network of geographically
distributed resources including computers, scientific
instruments and data. Schedulers in the Grid ensure
that jobs are completed in a particular order like
priority, deadline, urgency and load balancers
distribute tasks across systems to decrease the
chance of overload.
To determine the source of grid
performance problems (Lee et al., 2002) require
detailed end-to-end instrumentation of all
components, including applications, operating
systems, hosts, networks etc. But in this
environment, available communication and
computational resources are changed constantly. For
this purpose, raw historical data or forecasts of
future end-to-end path characteristics between the
source and each possible sink can be used.
The computational grid environment is
dynamic in nature. Here, participating nodes can be
connected and disconnected at the user’s wish or
detached by power failure or any kind of failure as
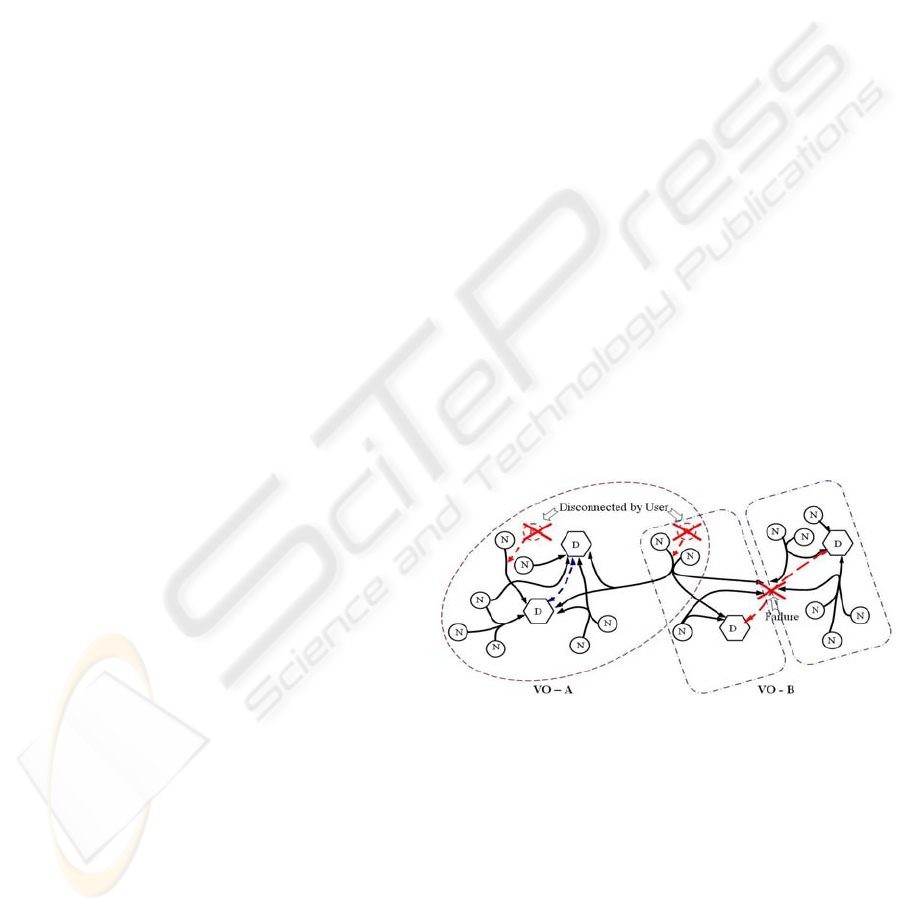
shown figure 1. Thus, predicting the performance of
nodes, whether previously used or not, can increase
the overall performance of data transfer in a grid
environment.
Figure 1: Node detachment in a computational Grid
environment
The figure 1 shows two different types of failures: i)
resource disconnected by user and ii) resource
disconnected by other failures. Here, D denotes
Directory Services and N denotes Nodes.
In any scenario mentioned above, grid
management middleware is used which
automatically resubmits jobs to other nodes on the
grid when a failure is detected. In real-time, multiple
copies of the important jobs run on different nodes
throughout the grid according to their previous
characteristics and performances. Their results are
176
B. M. Russel A. and Bevinakoppa S. (2005).
PREDICTING THE PERFORMANCE OF DATA TRANSFER IN A GRID ENVIRONMENT - A predictive framework for efficient data transfer in a Grid
environment.
In Proceedings of the Seventh International Conference on Enterprise Information Systems, pages 176-181
DOI: 10.5220/0002537401760181
Copyright
c
SciTePress

checked for any kind of inconsistency in data
transfer. There still remain the problems of selecting
the suitable nodes that are more reliable and give
better performance. In this paper we are addressing
the above-mentioned problem for selecting more
reliable and efficient nodes by predicting their
performance before allocating parallel tasks in a
computational Grid environment.
2 RELATED WORK
Vazhkudai and Schopf (Vazhkudai, 2002,
Vazhkudai, 2003) raised the necessity of multiple
data-streams as input as these data streams can be
periodic in nature. Similar to this work, Swany and
Wolski (Swany & Wolski, 2002) also used
multivariate predictors by constructing cumulative
distribution functions for 16 MB HTTP transfers.
Vazhkudai et al. (Vazhkudai et al., 2002) proposed a
context-insensitive and context sensitive factor
concept by considering the data size “on the fly” by
categorizing into 4 different ranges: 50MB, 50MB-
250MB, 250MB-750MB and more than 750MB for
wide area data transfer. We propose an idea of
considering the data size in ranking phase for
calculating a ranking factor. Liu et al. (Liu et al.,
2002) used a similar ranking policy for selecting
resources by considering the longest subtask
execution time with the following formula:
Moreover, Vazhkudai et al. (Vazhkudai et al.,
2001) used a ranking method among the resources
based on their available space for achieving the best
match. Similarly, Wolski (Wolski, 2003) proposed a
method for estimating the resource performance
characteristics of the resources with accuracy
ranking using the most recently gathered history. All
these still do not fulfil the requirement of
categorization data for source and sink nodes. After
estimating the GridFTP throughput we need to rank
the available nodes based on their performance. The
higher the ranking factor will indicate more reliable
nodes. Thus among all participating nodes, we can
allocate our parallel processes for transferring data
to efficient nodes based on their ranking factor.
Our research is to investigate and extend
the Middleware Service of the Globus project
(Globus) by constructing a predictive framework for
data transfer incorporating the following aspects:
a) Applying GridFTP log data, dynamic
Network Weather Service (NWS) data and
Disk throughput data for predicting the
network performance and calculating a
ranking factor when nodes are involved in
previous data transfer.
b) Predicting performance when there was
no previous transfer of data between source
and sink nodes.
3 PREDICTIVE FRAMEWORK
We construct a predictive framework for
performance prediction of already participated nodes
and potential participating nodes by:
(1) Recording the performance of end-to-end file
transfers employing integrated instruments of high
performance data transfers.
(2) Estimating future transfer performance by
predictors.
(3) Calculating ranking factor for identifying
efficient nodes and
(4) Constructing a data delivery infrastructure
for providing users with the raw data and predictions
by Monitoring & Discovery Service (MDS)
provided by Globus (Globus).
Our predictive framework performs activities in
four different phases to identify reliable nodes for
performing data transfer. The four phases are
Monitor, Prediction, Ranking and Delivery. The
framework is shown below:
3.1 Monitor Phase
In the Computational Grid environment, simply
allocating parallel processes is not enough for data
transfer as many applications require gigabyte or
even petabyte transfer, GridFTP log Data, Network
Weather Service Data, Disk I/O Data, Bandwidth or
effective throughput, Bottleneck Bandwidth, Round-
trip delay, and Data Size.
3.2 Prediction Phase
This is the second phase of our framework. In this
phase several predictors can be used to calculate
future performance from the historical value. The
aim of this phase is to achieve accurate prediction
calculation. To achieve accurate prediction we can
use univariable predictors (Vazhkudai et al. 2002,
Faerman, 1999, Wolski, 1997, Wolski, 1998, Wolski
et al., 1999) or multivariable predictors (Vazhkudai
& Schopf, 2002 Vazhkudai & Schopf, 2003).
Univariable predictors use only one source of
data. These can be only file transfer performance
data, network performance data, disk throughput
PREDICTING THE PERFORMANCE OF DATA TRANSFER IN A GRID ENVIRONMENT
177
data etc. Researchers found that multivariable
predictors provide better performance accuracy
compared to single variable predictors (Vazhkudai
& Schopf, 2002, Vazhkudai & Schopf, 2003, Swany
& Wolski, 2002).
Multivariable predictors are in the case of
nodes that participated in previous data transfers we
propose a prediction calculation model for
multivariable predictors modified from the
predictive model of Vazhkudai and Schopf
(Vazhkudai & Schopf, 2003) which considers three
different data sources for efficient prediction
calculation: GridFTP Data, NWS Data, Disk I/O
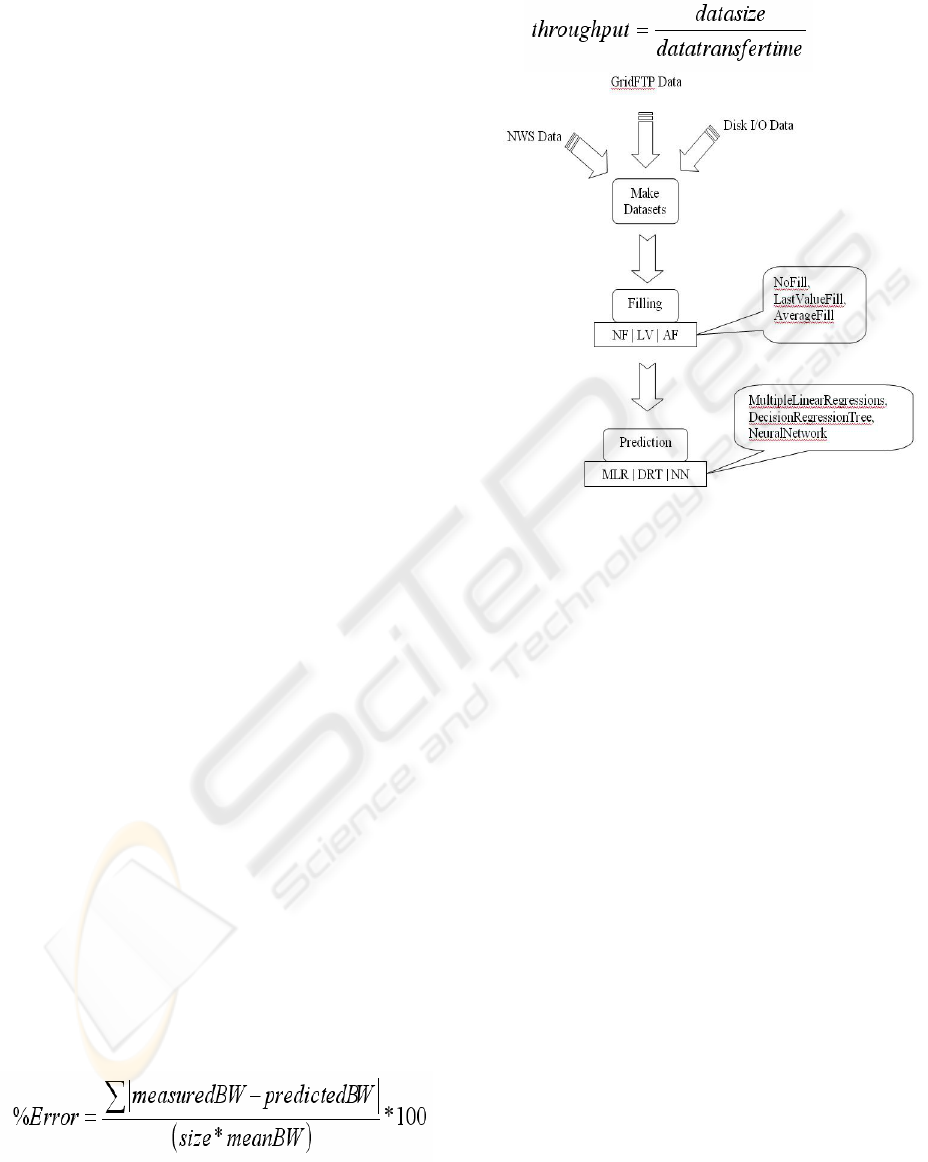
Data. Our prediction calculation model works in
several stages, which begins with making datasets
from historical performance datasets. Then apply
some filling techniques (Vazhkudai & Schopf, 2002,
Vazhkudai & Schopf, 2003) and then apply this
dataset to different prediction techniques and
achieve future performance value. Our prediction
model is shown in figure 2.
a) Make Datasets: In the first step we make the
dataset by closely comparing timestamp values of
three different data sources to make it single
common dataset.
b) Filling: Although these three source datasets are
correlated these are not available in all nodes with
the same timestamp. To overcome this problem, we
use some proposed filling techniques (Vazhkudai &
Schopf, 2003) in the second step:
• NoFill: We discard the unmatched NWS
data and Disk I/O data. By discarding
unmatched data we may lose useful data.
• LastValue: We fill in the last GridFTP
value for each unmatched NWS and Disk
I/O value.
• AverageValue: We consider an average
over the historical data transfers is
calculated for each timestamp.
c) Prediction Techniques: To calculate a more
accurate predictive value from three different data
sources we compare three different prediction
techniques. These are Multiple Linear Regression,
Decision Regression Tree and Neural Network. We
calculate prediction accuracy for these three
different prediction techniques using the following
formula:
Here, “size” is the total number of predictions
and the meanBW is the average measured GridFTP
throughput and GridFTP throughput by using the
following formula
.
Figure 2: Prediction
Three different prediction techniques can be
used for calculating future performance:
I. Multiple Linear Regression
II. Decision Regression Tree
III. Neural Network
In the next section we discuss each prediction
technique in detail
I. Multiple Linear Regressions:
Linear regression can be used to make predictions.
Simple linear regression involves discovering the
equation for a line that nearly fits the given data.
That linear equation is then used to predict values
for the data. If there are more than one predictor
variable we then use multiple linear regression
technique to calculate the predicted value.
Vazhkudai and Schopf (Vazhkudai & Schopf,
2003) used this technique for calculating a predictive
value from correlated datasets. Correlation describes
the strength, or degree, of linear relationship and
specifies to what extent the two variables behave
alike or vary together.
II. Decision Regression Tree
A decision tree can be used as predictive model
(Syed & Yona, 2003).
ICEIS 2005 - SOFTWARE AGENTS AND INTERNET COMPUTING
178

III. Neural Network
A Neural network is also a predictive model of
highly interconnected neurons, that accept inputs as
neurons by applying weighting coefficients and feed
their output to other neurons. The weights applied to
each input at each neuron are adjusted to optimize
the desired output. Neural networks are trained to
deliver the desired result by an iterative process.
This process continues through the network. Some
neurons may send feedback to earlier neurons in the
network.
3.3 Ranking Phase
After estimating the GridFTP throughput we need to
rank the available nodes based on their performance.
The higher-ranking factor will provide us with the
more reliable nodes. Thus among all possible nodes,
we can allocate our parallel processes for
transferring data to efficient nodes based on their
ranking factor which could be calculated as:
We consider two different scenarios which are:
1) Nodes that have already participated in data
transfer
2) Novice nodes that did not participate in any
data transfer
3.4 Delivery Phase
In this phase we can use Globus Resource
Allocation Manager (GRAM) and Monitoring
and Discovery Service (MDS) of the Globus project
(Globus). GRAM provides resource allocation and
process creation, monitoring and management
services. It maps requests via RSL (resources
specification language) into commands to local
schedulers.
MDS of Globus (Globus) provides better
performance among different monitoring services
(Zhang et al., 2003). In the computational Grid
environment, resources do dynamic registration via
Grid Resource Registration Protocol (GRRP) and a
client can query the resource via Grid Resource
Information Protocol (GRIP). Using these two
protocols, Grid Index Information Servers (GIIS) of
MDS knit together arbitrary GRIS services to
identifying resources and Grid Resource Information
servers (GRIS) of MDS to provide uniform facilities
of resource discovery. Using MDS, our forecasted
information can be published in directory services
along with other information to any authorized client
node for data transfer. Moreover, based on the
predicted information, GRAM can allocate jobs to
suitable nodes for scheduling or load balancing
purpose.
4 EXPERIMENTAL TEST-BED
SITES AND DATA SOURCES.
In this paper, we consider the data sources (GridFTP
log data, NWS log data, Disk IO data) (Trace-Data)
achieved among four different testbed sites (see
Figure 3): Argonne National Laboratory (ANL),
Information Sciences Institute (ISI) of University of
Southern California, Lawrence Berkeley National
Laboratory (LBL) and the University of Florida at
Gainesville (UFL). All sites comprised of 100
Mb/sec Ethernets with high-end storage.
Figure 3: Network settings for testbed sites. All sites are
connected through OC-12 or OC-48 network links. For
each site pair round trip times and network bottleneck
b
andwidths for the link between them is shown
4.1 Experimental Results
We design our experiments to compare different
prediction techniques by investigating several
univariable predictors and multivariable predictors.
We calculate the prediction error using the following
formula:
Here, “size” is the total number of predictions
and the meanBW is the average measured GridFTP
throughput and GridFTP throughput is achieved by
using the following formula:
PREDICTING THE PERFORMANCE OF DATA TRANSFER IN A GRID ENVIRONMENT
179
4.2 Comparison among multivariable
prediction techniques
We investigate three different prediction techniques
ie. Decision Regression Tree (DRT), Multiple
Linear Regression (MLR) and Neural Network (NN)
with a common dataset as shown in Table 1 below:
NWS DiskIO GridFTP
0.164971 0.64 7.876
0.154224 0.65 6.826
0.173058 0.56 7.314
0.151951 0.64 7.314
……… ……… ………
To compare these three prediction techniques we
use seven different sized training sets for each
prediction technique.
We calculate the Ranking factor to identify the
most efficient and reliable nodes for performing
10MB data transfer. According to our formula we
achieve the rank order among all participating nodes
for allocating parallel processes for data transfer:
()
00.24
74ms *MBps12.586Mbps
10MB
R
ISI UFL,
=
−
=
()
47.122
71ms *MBps40.660.4Mbps
10MB
R
LBL UFL,
=
−
=
In this case, ANL is a fresh node to UFL and ISI
performed previous data transfer with UFL.
Although ISI performed data transfer with UFL, our
ranking factor provides a higher rank to ANL than
ISI for UFL. Thus the ranking factor calculation
shows: R
UFL, LBL
> R
UFL, ANL
> R
UFL,ISI
. This
calculation solves the problem with novice
participating node consideration in data transfer.
4.2 Summary of Results
After performing several experiments we achieved
the following conclusion about choosing reliable and
efficient nodes based on their performance for data
transfer in the Grid environment:
• Univariable predictors provide accuracy
ranges between 15% and 25%.
• Average 25-value predictor provides better
prediction accuracy among all univariable
predictors examined.
• Multivariable predictor’s prediction
accuracy is better than univariable
predictor’s prediction accuracy.
• Average filling technique gives better
prediction accuracy by considering a one-
to-one mapping among multivariable
datasets.
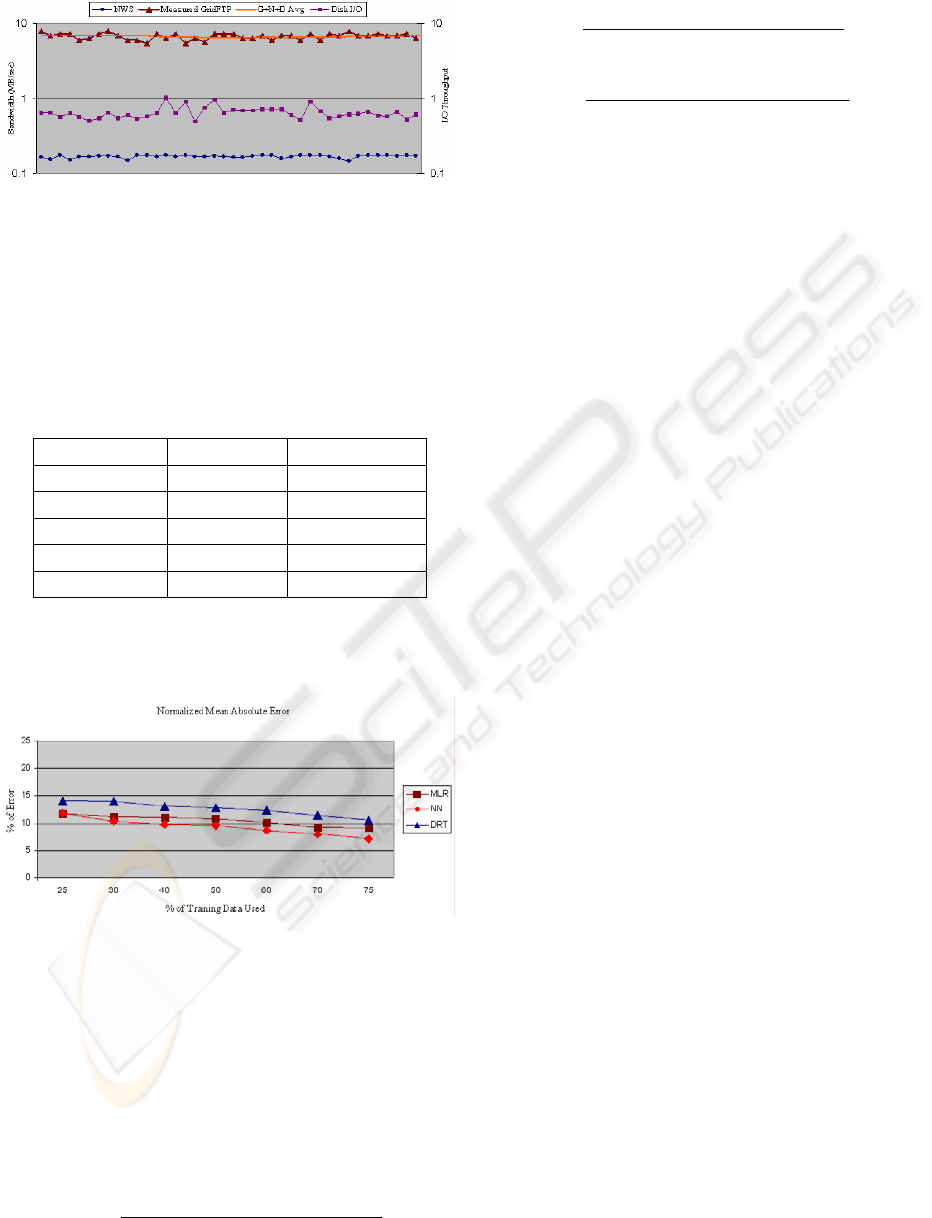
• Multiple Linear Regression (MLR)
prediction technique gives better prediction
accuracy using more number of training
input data compared with Decision
Regression Tree (DRT) and Neural
Network (NN) prediction techniques.
• DRT prediction technique provides less
prediction accuracy and the number of
nodes increases with the increase of
training input data thus consumes more
resources.
• NN prediction technique provides better
prediction accuracy with less number of
training input data but consumes more
resources and the accuracy increases with
more training input data.
Table 1: Sample dataset used in prediction
techniques for comparison purpose.
Figure 4: Relationship between NWS, Disk I/O
data, GridFTP data and Multiple Linear
egression with GridFTP + Disk I/O + NWS datR a
Figure 5: Comparison among three different
prediction calculation models with Normalized
Mean Absolute Error at different training datasets
inputs with 50% window shift
()
59.31
29ms *0.0MBps87.3Mbps
10MB
R
ANL UFL,
=
−
=
ICEIS 2005 - SOFTWARE AGENTS AND INTERNET COMPUTING
180

•
Ranking factor calculation solves the
problem with fresh node consideration for
data transfer.
Thus if we use a predictive framework for data
transfer by allocation jobs on reliable and efficient
participating nodes, it will improve the overall
performance of data transfer in Grid environment.
5 CONCLUSIONS AND FUTURE
WORK
In this paper we investigated the problem for
selecting reliable and efficient nodes by predicting
their performance before allocating parallel jobs in a
computational Grid environment. Allocating jobs to
predicted reliable nodes gives better performance
and is also more cost effective than using hot
pluggable expensive hardware. To solve this we
proposed a predictive framework with different
phases for providing information about efficient and
reliable participating nodes in the computational grid
environment. We discussed, examined and
compared various prediction techniques. We also
solved the problem of considering new nodes with
ranking factor calculations.
Although our proposed framework solves
the performance prediction problem, there may arise
a critical situation that many ranking factors will
become same for a large set of nodes in the vast
internet. In that case priority based factors might be
used. These can be any one of the measured factors
based on the network topology. Moreover, based on
the topology and the availability of the network, we
can choose either centralised or decentralised data
repository mechanism.
The extension of this work will be
improving the ranking policy by considering more
factors in the Grid environment. Improvement will
be possible in our prediction data delivery phase
with XML-based framework for better integration
with web services.
Acknowledgement: We would like to
acknowledge Mr Panu Phinjareonphan and Prof Bill
Appelbe for their valuable comments on the
experimentation.
REFERENCES
Faerman, M., Su, A., Wolski, R., and Berman, F., 1999.
Adaptive Performance Prediction for Distributed Data-
Intensive Applications. In SC’99 ACM/IEEE
conference on Supercomputing.
Globus. Globus Project. http://www.globus.org
Lee, J., Gunter, D., Stoufer, M., Tierney, B., 2002.
Monitoring Data Archives for Grid Environments. In
SC’02, ACM/IEEE conference on Supercomputing.
Liu, C., Yang, L., Foster, I., and Angulo, D., 2002. Design
and Evaluation of a Resource Selection Framework for
Grid Applications. In HPDC’02, 11th IEEE
Symposium on High-Performance Distributed
Computing.
Swany, M., Wolski, R., 2002. Multivariate Resource
Performance Forecasting in the Network Weather
Service. In SC’02, ACM/IEEE conference on
Supercomputing.
Syed, U., Yona, G., 2003. Using a Mixture of Probabilistic
Decision Trees for Direct Prediction of Protein
Function. In RECOMB’03, 7
th
Annual International
Conference on Computational Biology.
Vazhkudai, S. and Schopf, J., 2002. Predicting sporadic
grid data transfers. In HPDC’02, 11
th
IEEE
Symposium on High Performance Distributed
Computing.
Vazhkudai, S., Schopf, J.M., 2003. Using Regression
Techniques to Predict Large Data Transfers. In
IJHPCA’03, The International Journal of High
Performance Computing Application.
Vazhkudai, S., Schopf, J.M. and Foster, I, 2002.
Predicting the Performance of Wide Area Data
Transfers. In IPDPS’02, 16th International Parallel
and Distributed Processing Symposium.
Vazhkudai, S., Tuecke, S. and Foster, I., 2001. Replica
Selection in the Globus Data Grid. In CCGRID’01 1
st
IEEE/ACM International Conference on Cluster
Computing and the Grid). IEEE Press.
Wolski, R., 1997. Forecasting Network Performance to
Support Dynamic Scheduling Using the Network
Weather Service. In HPDC’97, 6th IEEE Symposium
on High Performance Distributed Computing.
Wolski, R., 1998. Dynamically Forecasting Network
Performance Using the Network Weather Service. In
JCC’98, Journal of Cluster Computing.
Wolski, R., 2003. Experiences with Predicting Resource
Performance On-line in Computational Grid Settings.
In ACM SIGMETRICS PER’03, ACM SIGMETRICS
Performance Evaluation Review.
Wolski, R., Spring, N., Hayes, J., 1999. The Network
Weather Service: A Distributed Resource Performance
Forecasting Service for Metacomputing. In JFGCS’99,
Journal of Future Generation Computing Systems.
Trace-Data.
http://www.csm.ornl.gov/~vazhkuda/GridFTP-
Predictions.zip
Zhang, X., Freschl, J., Schopf, J., 2003. , A Performance
Study of Monitoring and Information Services for
Distributed Systems. In HPDC’03, 12th IEEE
International Symposium on High Performance
Distributed Computing.
PREDICTING THE PERFORMANCE OF DATA TRANSFER IN A GRID ENVIRONMENT
181
