
PARTICLE-FILTER APPROACH AND MOTION STRATEGY FOR
COOPERATIVE LOCALIZATION
Fernando Gomez Bravo
Departamento de Ingenier
´
ıa Electrnica, Sistemas Inform
´
aticos y Autom
´
atica
Univ. de Huelva - Spain
Alberto Vale, Maria Isabel Ribeiro
Institute for Systems and Robotics, Instituto Superior T
´
ecnico
Av. Rovisco Pais 1, 1049-001 Lisboa, Portugal
Keywords:
Particle-Filter, Cooperative Localization, Navigation Strategies.
Abstract:
This paper proposes a Particle-Filter approach and a set of motion strategies to cooperatively localize a team of
three robots. The allocated mission consists on the path following of a closed trajectory and obstacle avoidance
in isolated and unstructured scenarios. The localization methodology required for the correct path following
relies on distance and orientation measurements among the robots and the robots and a fixed active beacon.
Simulation results are presented.
1 INTRODUCTION
This paper proposes a methodology for cooperative
localization of a team of robots based on a Particle-
Filter (PF) approach, relying on distance and orienta-
tion measurements among the robots and among these
and a fixed beacon. It is considered that the fixed bea-
con has sensorial capabilities of range and orientation
measurement, but has a maximum detectable range.
Each robot has limited range detection along a limited
field of view. For localization purposes, the proposed
approach propagates a PF for each robot. The parti-
cle weight update is based on the measurements (dis-
tance and orientation) that each robot acquires relative
to the other robots and/or the fixed beacon. A motion
strategy is implemented in such a way that each robot
is able to detect, at a single time instant, at least one
teammate or the fixed beacon. Therefore, either the
fixed beacon (if detected) or the other robots (if de-
tected) play the role of an external landmark for the
localization of each robot.
The developed strategy is targeted to an exploration
mission and it is considered that all the robots start
the mission close to the fixed beacon, evolve in the
environment, eventually may loose detection of the
fixed beacon, and have to return to the starting loca-
tion. Even more, due the sensorial limitations of the
robots they also could loose detection among them.
Cooperative localization is a key component of co-
operative navigation of a team of robots. The use of
multi-robot systems, when compared to a single ro-
bot, has evident advantages in many applications, in
particular there where the spatial or temporal cover-
age of a large area is required. An example on the
scientific agenda is the planet surface exploration, in
particular Mars exploration. At the actual technol-
ogy stage, the difficulty in having human missions to
Mars justifies the development, launching and opera-
tion of robots or teams of robots that may carry out
autonomously or semi-autonomously a set of explo-
ration tasks. The mission outcomes in the case of
surface exploration may largely benefit from having
a team of cooperative robots rather than having a sin-
gle robot or a set of isolated robots. In either case, and
depending on the particular allocated mission, the ro-
bots may have to be localized relative to a fixed bea-
con or landmark, most probably the launcher vehicle
that carried them from earth.
Cooperative localization schemes for teams of ro-
bots explore the decentralized perception that the
team supports to enhance the localization of each ro-
bot. These techniques have been studied in the recent
past, (Gustavi et al., 2005; Tang and Jarvis, 2004; Ge
and Fua, 2005; Martinelli et al., 2005).
In the approach presented in this paper, besides co-
operative localization, the team navigation involves
obstacle avoidance for each robot and a motion strat-
egy where one of the robots, the master, follows a pre-
specified path and the other teammates, the slaves,
have a constrained motion aimed at having the mas-
ter in a visible detectable range from, at least, one of
the slaves. The master stops whenever it is to loose
50
Gomez Bravo F., Vale A. and Isabel Ribeiro M. (2006).
PARTICLE-FILTER APPROACH AND MOTION STRATEGY FOR COOPERATIVE LOCALIZATION.
In Proceedings of the Third International Conference on Informatics in Control, Automation and Robotics, pages 50-57
DOI: 10.5220/0001203300500057
Copyright
c
SciTePress
visible contact with the slaves and these move to ap-
proach the master and to provide it with visible land-
marks.
The localization problem has to deal with the un-
certainty in the motion and in the observations. Com-
mon techniques of mobile robot localization are based
on probabilistic approaches, that are robust relative to
sensor limitations, sensor noise and environment dy-
namics. Using a probabilistic approach, the localiza-
tion turns into an estimation problem with the evalua-
tion and propagation of a probability density function
(pdf). This problem increases when operating with
more than one robot, with complex sensor’s model or
during long periods of time. A possible solution for
the localization problem is the PF approach, (Thrun
et al., 2001; Rekleitis, 2004), that tracks the variables
of interest. Multiple copies (particles) of the variable
of interest (the localization of each robot) are used,
each one associated with a weight that represents the
quality of that specific particle.
The major contribution of this paper is the use of
a PF approach to solve the cooperative localization
problem allowing the robots to follow a reference path
in scenarios where no map and no global positioning
systems are available and human intervention is not
possible. The simulation is implemented with a fleet
of three car-like vehicles.
This paper is organized as follows. Section 1
presents the paper motivation and an overview of re-
lated work on mobile robot navigation using PF. Sec-
tion 2 introduces the notation and the principles of
Particle-Filter. Section 3 explains the main contribu-
tions of the paper, namely the cooperative localiza-
tion and motion strategy using PF in a team of ro-
bots. Simulation results obtained with some robots in
an environment with obstacles are presented in Sec-
tion 4. Section 5 concludes the paper and presents
directions for further work.
2 SINGLE ROBOT NAVIGATION
This section describe the robots used in the work and
presents the basis for the PF localization approach
for each single robot in the particular application de-
scribed in Section 1.
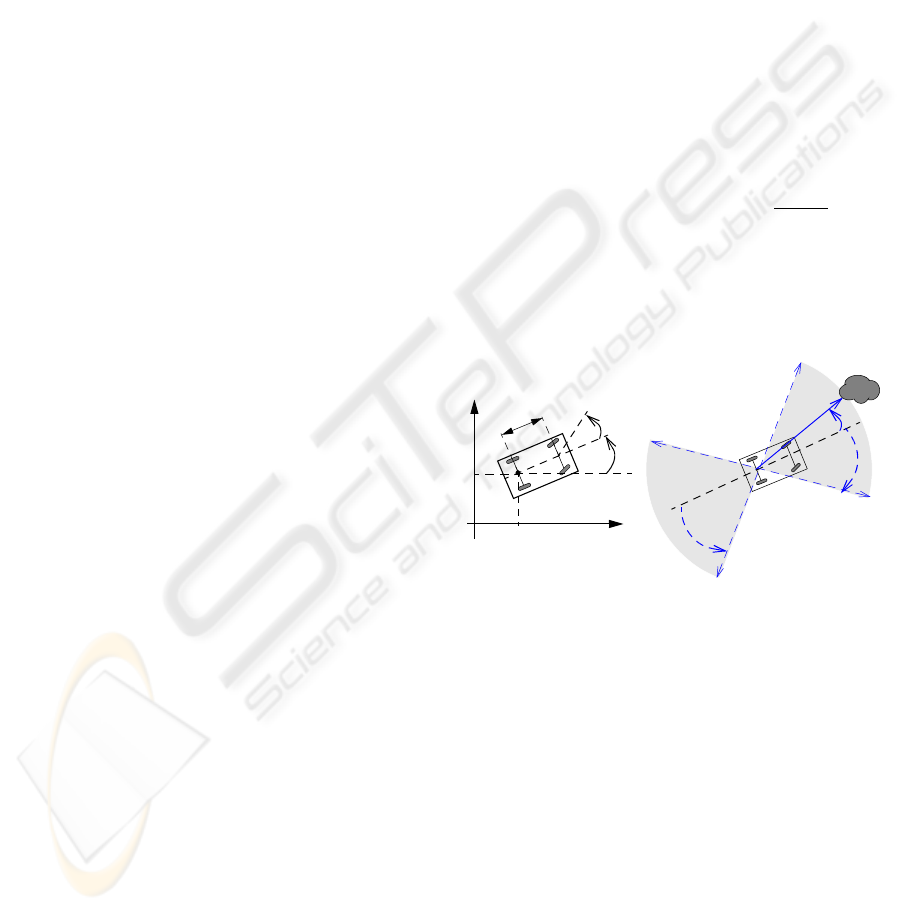
2.1 Robot Characterization
It is assumed that each robot is equipped with a
2D laser scanner, with a maximum range capability,
ρ
max
, over a limited rear and front angular field of
view of width 2ϕ
max
, as represented in Figure 1-
right. Consequently, the robots are able to measure
the distance, ρ, and the direction, ϕ, to obstacles in
their close vicinity and are prepared to avoid obsta-
cles. This sensor supports the robot perception to
evaluated the distance and the orientation under which
the beacons (the fixed beacon and/or the other robots
in the team) are detected. It is also assumed that each
robot is able to recognize the other robots and the
fixed beacon based on the same laser scanner or us-
ing, for instance, a vision system.
Maneuvering car/cart-like vehicles is a difficult
task, when compared with other type of vehicles,
for instance mobile robots with differential kinematic
system. Due to this fact, car/cart-like kinematic sys-
tem has been considered to emphasize the capabilities
of the purposed localization technique when applied
on these type of vehicles. The kinematic model of
a car/cart-like vehicle, presented in Figure 1, is ex-
pressed by
˙x
˙y
˙
θ
=
"
cos(θ) 0
sin(θ) 0
0 1
#
·
v(t)
v(t)
tan φ(t)
l
(1)
where (x, y) is the position, θ is the vehicle’s heading,
both relative to a global referential, v(t) is the linear
velocity and φ(t) is the steering angle that defines the
curvature of the path and l is the distance between the
rear and front wheels (see Figure 1-left).
φ
x
θ
Y
X
ρ
ϕ
ρ
max
ϕ
max
y
ϕ
max
ρ
max
l
Figure 1: Robot’s kinematic model (left) and sensorial ca-
pabilities (right).
The proposed navigation strategy is optimized for
car/cart like vehicles (as described in Section 3), but
the approach can be implemented in robots with sim-
ilar capabilities of motion and perception.
2.2 Localization Based on
Particle-Filter
The pose of a single robot is estimated based on a
PF, (Thrun et al., 2001). Each particle i in the filter
represents a possible pose of the robot, i.e.,
i
p =
i
x,
i
y,
i
θ
. (2)
In each time interval, a set of possible poses (the
cloud of particles) is obtained. Then, the particles are
classified according to the measurement obtained by
PARTICLE-FILTER APPROACH AND MOTION STRATEGY FOR COOPERATIVE LOCALIZATION
51
the robot at its real pose. Simulations of the measure-
ments are performed, considering each particle as the
actual pose of the robot and the probabilistic model
of the sensor. The believe of each particle being the
real pose of the robot is evaluated taking into account
these measurements. The real pose of the robot is es-
timated by the average of the cloud of particles based
on their associated believes. An important step of
the method is the re-sampling procedure, where the
less probable particles are removed from the cloud,
bounding the uncertainty of the robot pose, (Rekleitis,
2004).
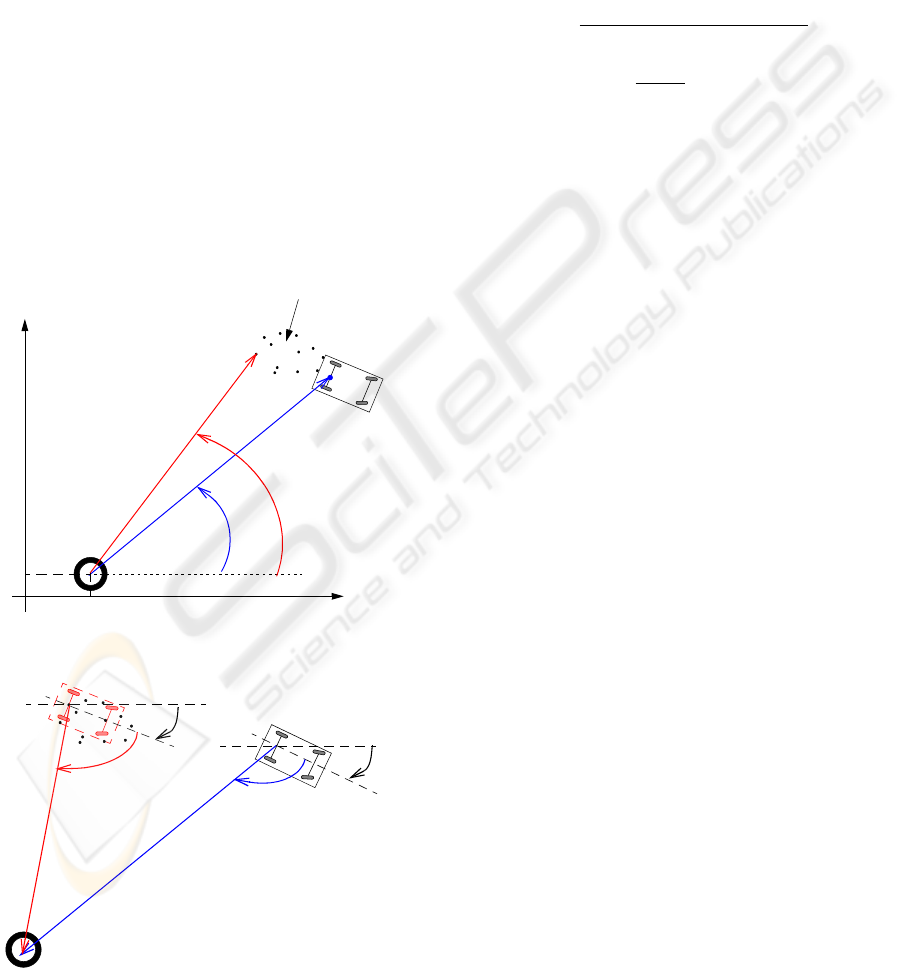
Differently from other approaches, where a set
of fixed beacons are distributed for localization pur-
poses, (Betke and Gurvits, 1997), this paper considers
the existence of a single fixed beacon L at (x
L
, y
L
),
as represented in Figure 2- a, that provides a fixed ref-
erence each time the robot observes it. The fixed bea-
con has sensorial capabilities similar to those of the
robots, with limited range detection but over a 360
◦
field of view (see Figure 2-a).
ρ
LB
ρ
i
LB
ϕ
i
LB
L
B
x
B
y
B
θ
B
,,()
x
i
B
y
i
B
θ
i
B
,,()
ϕ
LB
X
Y
Cloud of particles
y
L
x
L
a)
ρ
BA
L
θ
B
B
θ
i
B
i
B
ρ
i
BL
ϕ
BL
ϕ
i
BL
ρ
BL
b)
Figure 2: a) Robot and a fixed beacon observation and b)
each particle and robot observations.
The particles associated to the robot are weighted
taking into account the observations made by the ro-
bot and by the fixed beacon. Let ρ
LB
and ϕ
LB
be the
distance and the relative orientation of the robot B ob-
tained from the fixed beacon measurement (Figure 2-
a). Similarly, ρ
BL
and ϕ
BL
are the distance and the
relative orientation of the beacon obtained from the
robot measurement (Figure 2-b). Additionally, each
particle associated to the robot B defines
i
ρ
LB
and
i
ϕ
LB
(which represents the fixed beacon measure-
ment if the robot was placed over the particle i):
i
ρ
LB
=
p
(x
L
−
i
x
B
)
2
+ (y
L
−
i
y
B
)
2
+ ξ
ρ
(3)
i
ϕ
LB
= arctan
i
ρ
LB
y
i
ρ
LB
x
+ ξ
ϕ
(4)
where ξ
ρ
and ξ
ϕ
represent the range and angular un-
certainties of the laser sensor, considered as Gaussian,
zero mean, random variables. The simulated mea-
surements for each particle define two weights,
i
P
ρ
and
i
P
ϕ
, related to the acquired sensorial data as,
i
P
ρ
= κ
ρ
·
ρ
LB
−
i
ρ
LB
−1
(5)
i
P
ϕ
= κ
ϕ
·
ϕ
LB
−
i
ϕ
LB
−1
(6)
where κ
ρ
and κ
ϕ
are coefficients that allow to com-
pare both distances. Thus, a weight that determines
the quality of each particle according to the beacon
measurement is given by
i
w
LB
=
η
LB
·
i
P
ρ
·
i
P
ϕ
if V
LB
= 1
1 if V
LB
= 0
(7)
where η
LB
is a normalization factor and V
LB
is a
logic variable whose value is 1 if L observes B, and 0
otherwise. On the other hand, each particle also de-
fines
i
ρ
BL
,
i
ϕ
BL
(which represents the robot mea-
surement of the distance and angle with which the
fixed beacon will be detected if the robot were placed
over the particle i, i.e., in
i
B, see Figure 2-b) and V
BL
(a logic variable whose value is 1 if B observes L and
0 otherwise). The weight that determines the quality
of each particle according to the measurement to the
beacon is similar to (7), by switching the indices “B”
and “L”. Therefore, the total weight of the particle i
associated with the robot B,
i
w
B
, is given by
i
w
B
=
i
λ
B
·
i
w
LB
·
i
w
BL
(8)
where
i
λ
B
is a normalization factor. Given the for-
mulation of the weights, if the vehicle is not able to
observe the fixed beacon and the fixed beacon is not
able to detect the robot, or equivalently V
LB
= 0
and V
BL
= 0, all the particles have the same im-
portance. As will be shown in Section 4, when no
observations are available, re-sampling is not possi-
ble and therefore localization uncertainty increases.
Once the mobile robot observes again the fixed bea-
con or vice-versa, re-sampling is possible and uncer-
tainty decreases.
ICINCO 2006 - ROBOTICS AND AUTOMATION
52

2.3 Path Following and Obstacle
Avoidance
Due to the limited range of perception featured by
the sensors, the robot may navigate in areas where
the perception of the fixed beacon is not available.
To cope with this constraint the navigation strategy
should assure that the vehicle will return to the ini-
tial configuration, i.e., the initial position where the
vehicle and the beacon are able to detect each other.
Different strategies can be applied to drive the robot
to the initial configuration.
One strategy is based on a set of way points along
a closed path. However, the environment is still un-
known and some way points could lay over an obsta-
cle. When this occurs the navigation algorithm may
endows to an unreachable point leading to circular
paths around obstacles. To overcome this problem
another strategy is adopted. The idea is to build a
continuous path that the robot has to follow with an
obstacle avoidance capability based on reactive navi-
gation techniques.
Different approaches have been proposed for path
following, where the robot position is estimated by
Extended Kalman Filter (EKF) using Global Position
System (GPS) and odometry (Grewal and Andrews,
1993). In the present work no GPS is available, and
rather than using EKF, a PF approach is used.
To accomplish an accurate navigation, each ro-
bot follows a path previously defined and the “Pure-
pursuit” algorithm (Cuesta and Ollero, 2005) is ap-
plied for path-tracking. This algorithm chooses the
value of the steering angle as a function of the esti-
mated pose at each time instant. Without a previous
map, different obstacles may lay over the path and,
consequently, a reactive control algorithm will be ap-
plied if the vehicle is near an obstacle, (Cuesta et al.,
2003). The path-tracking and the obstacle avoidance
are combined in such a way that the robot is able
to avoid the obstacle and continue the path-tracking
when the vehicle is near the path.
3 COOPERATIVE
LOCALIZATION AND
NAVIGATION
This section illustrates the cooperation among robots
to improve the robots localization when the detec-
tion of the fixed beacon is not available. The method
takes advantage of the measurement of the different
teammates in order to estimate the pose of each robot.
Moreover, a cooperative motion strategy is presented
that allows the team of robots to perform a more effi-
cient localization. Robots are identified by numbers 1
to 3 and the fixed beacon is numbered with 4 as rep-
resented in Figure 3.
3.1 Cooperative Robots Localization
Based on Particle-Filter
The pose of each robot is estimated by the PF tech-
nique, considering all the robots involved, i.e., the
measurements acquired by all the robots. When a ro-
bot moves, only the weights of the particles of that
robot are updated. However, the estimation of the po-
sition using PF is performed taking into account the
measurements acquired by the sensors of that robot
and the other robots.
Similarly for the case involving the fixed beacon, if
B is a robot moving and A is a static robot, the obser-
vation of robot B performed by the robot A defines the
values ρ
AB
and φ
AB
. In the same way, the observa-
tion of robot A performed by robot B defines ρ
BA
and
φ
BA
, which is similar to Figure 2, replacing the bea-
con L by the robot A. Thus, each particle associated
with the robot B defines the values
i
ρ
AB
,
i
ρ
BA
,
i
φ
AB
and
i
φ
BA
. These values can be obtained applying ex-
pressions similar to (3) and (4). Nevertheless, in this
case, instead of using the position of the fixes beacon,
the estimated position of the robot A (ˆx
A
, ˆy
A
,
ˆ
θ
A
) is
considered. Therefore, from the measurement of ro-
bot A and B, the weights
i
w
AB
and
i
w
BA
, which de-
termine the quality of each particle according to both
measurements, can be obtained. The weights are cal-
culated by expressions similar to (5), (6) and (7).
Therefore, all the measurements acquired by a ro-
bot depend on the estimated position of the other ro-
bots. The evaluation for the poses estimation includes
cumulative errors and, consequently, the weight of the
particles are influenced by the measurement provided
by the fixed beacon (when it is able to observe the
robots or the robots are able to observe the fixed bea-
con). Then, the weight of the particle i of the robot j
is given by
i
w
j
=
Q
3
n=1,n6=j
i
w
nj
·
i
w
jn
if V
4j
+ V
j4
= 0
i
w
4j
·
i
w
j4
if V
4j
+ V
j4
= 1
,
whose value depends on the logic variables V
j4
(equal
to 1 if the robot j can observe the fixed beacon) and
V
4j
(equal to 1 if the fixed beacon is able to observe
the robot j).
3.2 Motion Strategy
In this approach, the objective of the team naviga-
tion is the exploration of an unknown environment.
A closed path is defined to be followed by one of the
robots of the team. For a correct path following, local-
ization is carried out using the PF approach described
in sections 2.1 and 2.2. As the path may be such that
PARTICLE-FILTER APPROACH AND MOTION STRATEGY FOR COOPERATIVE LOCALIZATION
53
the fixed beacon is not detected, to achieve this goal
some robots operate as beacons to their teammates,
with this role interchanged among them according to
a given motion strategy.
There are other approaches exploring the same
idea. In (Grabowski and Khosla, 2001; Navarro-
Serment et al., 2002) a team of Milibots is organized
in such a way that part of the team remains station-
ary providing known reference points for the moving
robots. This approach, named as “leap-frogging” be-
haviour, uses trilateration to determine the robots po-
sition. To apply trilateration, three beacons are re-
quired. During the main part of the navigation prob-
lem considered in this paper, only two robots (acting
as beacons) are detected from the robot whose local-
ization is under evaluation, as the fixed beacon is not
detected. There are situations where only a single ro-
bot is visible and trilateration is not useful.
In (Rekleitis, 2004) a collaborative exploration
strategy is applied to a team of two robots where one
is stationary, and acts as a beacon, while the other is
moving, switching the roles between them. In that
approach, PF technique is applied for cooperative lo-
calization and mapping. Nevertheless, it is supposed
that the heading of the observed robot can be mea-
sured. Since this estimation is not trivial, this paper
presents a different approach for PF.
In the proposed methodology the team is divided
in two categories of robots. One of the robots is con-
sidered the “master” having the responsibility of per-
forming an accurate path following of a previously
planned trajectory. The other two robots, the “slaves”,
play the role of mobile beacons. The master robot is
identified by the number 1, and the slave robots with 2
and 3 (see Figure 3). Initially, the master follows the
planned path until it is not able to detect, at least, one
slave. Once this occurs, the master stops and the slave
robots start to navigate sequentially. They try to reach
different poses where they will act as a beacon for the
master. These poses can be determined previously,
taking into account the path and a criterion of good
coverage, or can be established during the navigation,
considering the position where the master stopped. In
both cases, the objective is to “illuminate” the master
navigation by the slave mobile beacons in such a way
that it can be located accurately. At this stage, once
the master stops and one of the slaves is moving, the
master and the other slave play the role of beacon for
the slave which is moving.
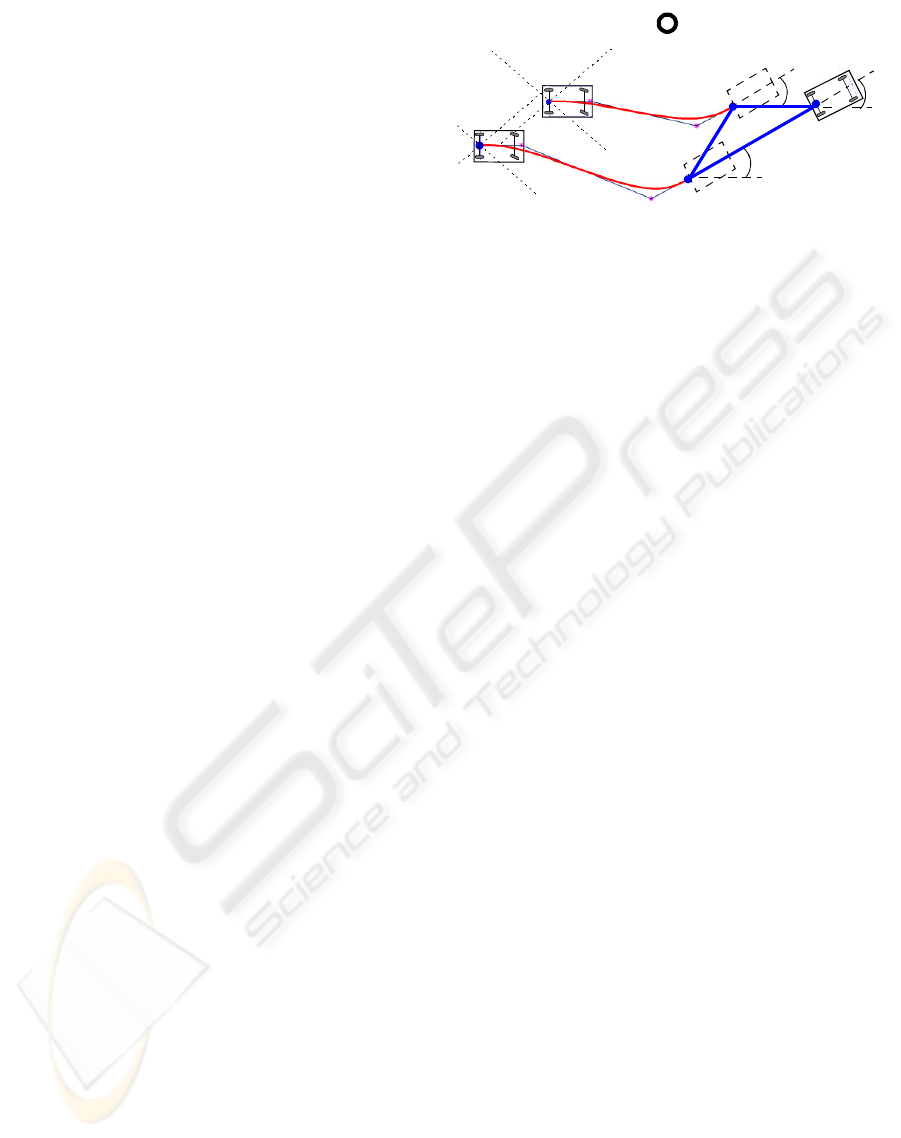
According to the previous statement and consider-
ing the type of sensors and the angular field of view, a
strategy for motion of the slaves is considered. The
strategy is based on the idea of building a triangu-
lar formation after the master stops, what happens
when the master is not able to detect, at least, one
slave. Using this triangular configuration the vehicles
are allowed to estimate their position by means of the
θ
θ
θ
4
Beacon
3
Slave
2
Slave
1
Master
P
2
P
3
Figure 3: β-spline generation.
measurement of their relative positions with the min-
imum possible error. Furthermore, slave robots give
the master a large position estimation coverage. This
configuration is fundamental if the view angle of the
sensors is constrained, otherwise, the robots can see
each other in any configuration.
Once the master has stopped, two points P
2
and P
3
are generated (see Figure 3) and the slaves will have
to reach these points with the same orientation of the
master so that they can see each other. P
2
and P
3
are
calculated by taking into account the angular field of
view of the robots. Hence, P
2
is located along the
master’s longitude axis and P
3
is such that the master,
P
2
and P
3
define an isosceles triangle.
Therefore, when the master robot stops, a path is
generated in such a way that it connects each current
slave position with the goal point (P
2
or P
3
). This
path has also to accomplish the curvature constraint
and allow the slave vehicles to reach the goal point
with a correct orientation. For this purpose, β-Splines
curves, (Barsky, 1987), have been applied as repre-
sented in Figure 3.
Master and slave perform the path following and
the collision avoidance in a sequential way. The slave
2 starts moving when the master has stopped. The
slave 3 begins to move once the slave 2 reaches its
goal. Finally, the master starts moving when the slave
3 has reached its target configuration.
4 SIMULATION RESULTS
Different experiments have been implemented to test
the proposed approach, performed with different
numbers of teammate: one, two and three robots.
Several trajectories have been generated to evaluate
the influence of the length and the shape of the path
on the localization performance.
The algorithm was tested by considering that the
robots perform both clockwise or anti-clockwise
loops. Figure 4-a) presents the desired path (dotted-
line), the real path (continuous line) and the estimated
path (dashed-line) obtained by the navigation of a sin-
gle robot, i.e., no cooperative localization is consid-
ered. The fixed beacon is represented by the non-
ICINCO 2006 - ROBOTICS AND AUTOMATION
54

filled circle. Figure 4-b) presents the evolution of the
cloud of particles along the navigation process, which
conveys the associated uncertainty. The cloud shrinks
when the robot observes the fixed beacon and enlarges
when no observation is acquired.
a)
b)
Figure 4: a) Single robot navigation and b) evolution of the
cloud of particles.
Figures 5-a) and 6-a) illustrate the evolution of the
real and the estimated path when the cooperative nav-
igation is applied on a team of two and three robots,
respectively, along the same desired path. Figures 5-
b) and 6-b) present the evolution of the cloud of parti-
cles for the master robot. The estimation is improved,
mainly when using three robots and, consequently,
the navigation of the master robot is closer to the de-
sired path. In each experiment the robots closed the
loop three times. The improvement in the pose es-
timation when applying the cooperative localization
technique is shown in these figures as the real and the
estimated path are closer than in the previous experi-
ment, with a single robot.
SLAVE
a)
b)
Figure 5: a) Two ro bots in a big loop and b) evolution of the
cloud of the master robot.
Figure 7 presents the error of the position estima-
tion in the previous three experiments along one loop,
with different number of teammate. It is remarkable
that the error decreases when the number of the robots
in a team increases. However, the time the robots take
to close the loop increases with the number of team-
mate, since the motion strategy for cooperative local-
ization requires that part of the team remain stationary
while one of the robot is navigating.
Figure 8 illustrates two experiments with different
paths in which a team of three robots closed the loop
several times. Both paths are shorter than the path of
Figure 5-a). In the path of Figure 8-b) (the one whose
shape looks like a Daisy) the robots navigate close to
the beacon for three times.
PARTICLE-FILTER APPROACH AND MOTION STRATEGY FOR COOPERATIVE LOCALIZATION
55
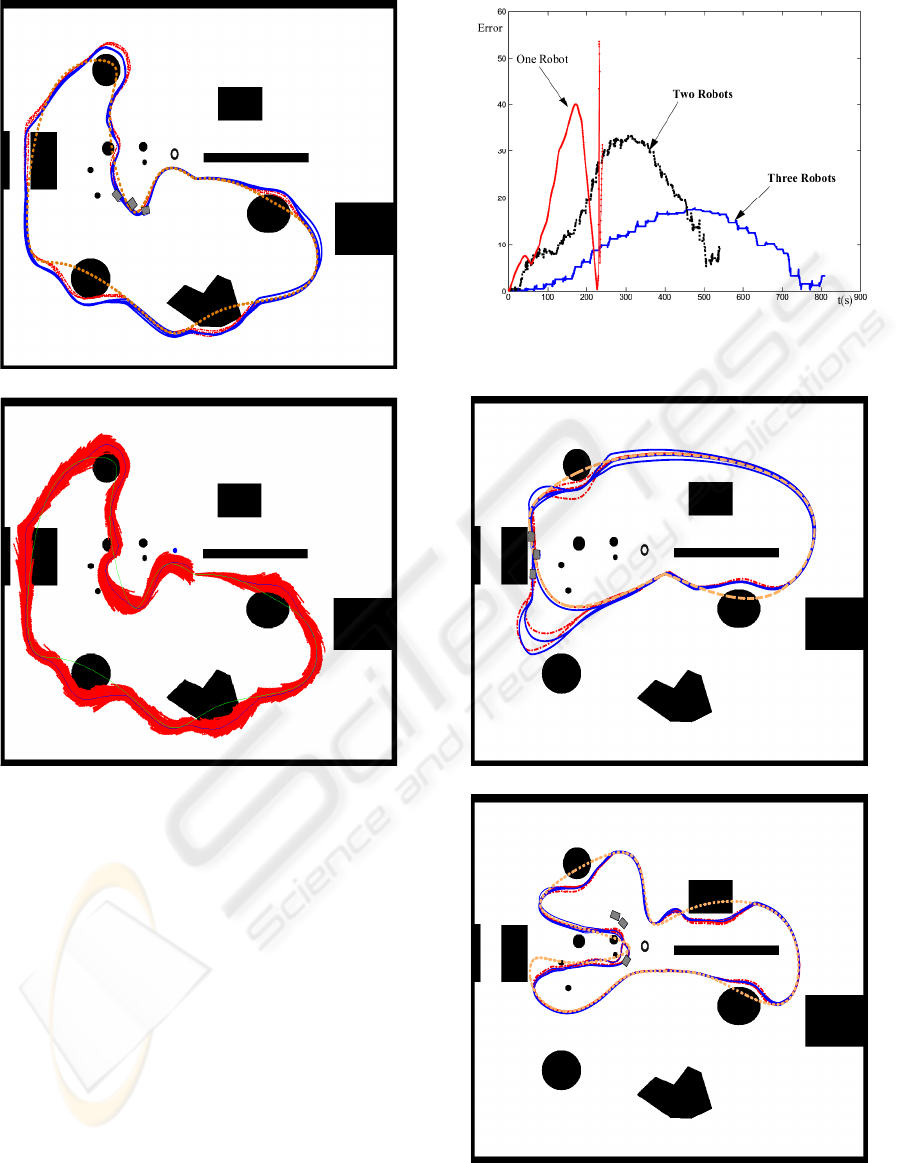
MASTER
SLAVE 2
SLAVE 3
a)
b)
Figure 6: a) Three robots in a big loop and b) evolution of
the cloud of the master robot.
Figure 9 presents the error of the position estima-
tion along one loop of the experiment of Figure 8-
a),b) and 5-a). It illustrates that shorter paths provide
lower error and therefore better performance. In ad-
dition, this figure also illustrates that the pose estima-
tion can be improved by modifying the shape of the
path as is the case of the experiment of the ”Daisy
path (Figure 8-b). In this experiment, the error re-
mains bounded presenting lower values than the other
experiments. This improvement is achieved due to the
effect of navigating near the beacon and applying its
perception for updating the weight of the robots par-
ticles. Obviously, the pose estimation improves when
the time periods where the robot navigates near the
beacon increases. A conclusion is, if the exploration
of wide and large spaces is needed, trajectories similar
Figure 7: Position estimation error along the big loop for
teams with 1, 2 and 3 robots.
MASTER
SLAVE 2
SLAVE 3
a)
MASTER
SLAVE 2
SLAVE 3
b)
Figure 8: Cooperative navigation along two different p aths:
a) short loop and b) Daisy loop.
ICINCO 2006 - ROBOTICS AND AUTOMATION
56

Figure 9: Position estimation error along one loop for a
team of three robots along different paths.
to the daisy path are preferred, i.e., trajectories where
the team navigates near the beacon several times.
5 CONCLUSION AND OPEN
ISSUES
This paper presented a Particle-Filter approach to
solve the cooperative localization problem for a small
fleet of car-like vehicles in scenarios without map or
GPS and no human intervention. A team of three ro-
bots and a fixed beacon have been considered in such
a way that the robots take advantage of cooperative
techniques for both localization and navigation. Each
robot serves as an active beacon to the others, working
as a fixed reference and, at the same time, providing
observations to the robot which is moving. With this
approach, robots are able to follow a previous calcu-
lated path and avoid collision with unexpected obsta-
cles.
Moreover, the proposed approach has been vali-
dated by different simulated experiments. Different
path and number of teammates have been considered.
The experiments illustrate that the number of team-
mates decreases the estimation error. Likewise, the
length of the planned path affects to the quality of the
estimation process. However, for paths with similar
length, the estimation procedure can be improved by
changing its shape.
The following step is the implementation of this ap-
proach in a team of real car-like robots. There are still
open issues requiring further research, in particular
the number of particles and other tuning parameters,
the matching between beacons and other mobile ro-
bots and the implementation of active beacons.
ACKNOWLEDGEMENTS
Work partially supported by the Autonomous Gover-
ment of Andalucia and the Portuguese Science and
Technology Foundation (FCT) under Programa Op-
eracional Sociedade do Conhecimento (POS C) in the
frame of QCA III. First author also acknowledges the
support received by the ISR.
REFERENCES
Barsky, B. (1987). Computer graphics and geometric mod-
elling using β-Splines. S.-Verlag.
Betke, M. and Gurvits, L. (1997). Mobile robot localization
using landmarks. IEEE Transaction on Robotics and
Automation, 13(2):251 – 263.
Cuesta, F. and Ollero, A. (2005). Intelligent Mobile Robot
Navigation. Springer.
Cuesta, F., Ollero, A., Arrue, B., and Braunstingl, R.
(2003). Intelligent control of nonholonomic mobile
robots with fuzzy perception. Fuzzy Set and Systems,
134:47 – 64.
Ge, S. S. and Fua, C.-H. (2005). Complete multi-robot
coverage of unknown environments with minimum re-
peated coverage. Proc. of the 2005 IEEE ICRA, pages
727 – 732.
Grabowski, R. and Khosla, P. (2001). Localization tech-
niques for a team of small robots. Proc. of the
IEEE/RSJ Int. Conf. on Intelligent Robots and Sys-
tems, 2:1067 – 1072.
Grewal, M. S. and Andrews, A. P. (1993). Kalman Filtering
Theory and Practice. Prentice-Hall, Englewood Cliffs
and New Jersey.
Gustavi, T., Hu, X., and Karasalo, M. (2005). Multi-robot
formation control and terrain servoing with limited
sensor information. Preprints of the 16th IFAC World
Congress.
Martinelli, A., Pont, F., and Siegwart, R. (2005). Multi-
robot localization using relative observations. Proc. of
the 2005 IEEE Int. Conf. on Robotics and Automation,
pages 2808 – 2813.
Navarro-Serment, L. E., Grabowski, R., Paredis, C., and
Khosla, P. (2002). Localization techniques for a team
of small robots. IEEE Rob. and Aut. Magazine, 9:31 –
40.
Rekleitis, I. (2004). A particle filter tutorial for mobile robot
localization. (TR-CIM-04-02).
Tang, K. W. and Jarvis, R. A. (2004). An evolutionary com-
puting approach to generating useful and robust ro-
bot team behaviours. Proc. of 2004 IEEE/RSJ IROS,
2:2081 – 2086.
Thrun, S., Fox, D., Burgard, W., and Murphy, F. D. (2001).
Robust monte carlo localization for mobile robot. Ar-
tificial Intelligence Magazine, 128(1 - 2):99 – 141.
PARTICLE-FILTER APPROACH AND MOTION STRATEGY FOR COOPERATIVE LOCALIZATION
57
