
HYBRID EVOLUTIONARY COMPUTATIONS
Application for Industry Investment Problem
Tadeusz Dyduch
Institute of Computing Science, AGH University of Science and Technology, Mickiewicza 30, Krakow, Poland
Keywords: Evolutionary computation, mixed linear programming, investments planning.
Abstract: The paper presents a special type of hybrid evolutionary computation, named by the authors Two-Level
Adaptive Evolutionary Computation (TLAEC). The method consists in combination of evolutionary
computation with deterministic optimization algorithms in a hierarchical system. Novelty of the method
consists also in a new type of adaptation mechanism. Post optimal analysis of the lower level optimization
task is utilized in order to modify probability distributions for new genotype generating. The paper presents
an algorithm based on TLAEC method, solving a difficult optimization problem. A mathematical model of
this problem assumes the form of mixed discrete-continuous programming. A concept of the algorithm is
described in the paper and the proposed, new adaptation mechanism that is implemented in the algorithm is
described in detail. The results of computation experiments as well as their analysis are also given.
1 INTRODUCTION
Evolutionary Computation (EC) is one of the most
important and emerging technology of the recent
times. Numerous scientific works, conferences,
commercial software offers and academic
handbooks were devoted to this technology.
Evolutionary computations can be classified as
iterative optimization methods based on a partially
stochastic search through an optimization domain.
Evolutionary computation has become the standard
term that encompasses all of the evolutionary
algorithms.
In order to improve convergence of evolutionary
computation, evolutionary strategies have been
devised, where the adaptation mechanism have been
introduced (Michalewicz, 1996), (Eiben, 1999).
The paper presents a modification of the special
type of adaptive evolutionary method, named two-
level adaptive evolutionary computation (TLAEC),
proposed and developed in (Dyduch T., 2004),
(Dyduch T., Dudek-Dyduch E., 2005). Although the
adaptation mechanism is embedded in the method,
the adaptation differs from the classical evolutionary
strategy. Novelty of the presented method consists in
a new adaptation mechanism that is embedded in it,
which utilises the data from local optimal analysis.
2 TWO-LEVEL ADAPTIVE
EVO-LUTIONARY
COMPUTATION
A modified TLAEC method consists of the
following stages.
1. Generation of Population
The primary optimization task is transformed to
the form suitable for hierarchical two-level
algorithms. Thus, the set of searched variables are
divided into two disjoint subsets. Similarly, the
constraints are divided into two disjoint subsets.
The first subset of variables corresponds to a
genotype. Values of the variables are computed on
the higher level by means of random procedures
using mutations and/or crossover operators. Only the
first subset of constraints is taken into account here.
These constraints refer only to the genotype. The
values of the genotype constitute parameters for the
lower level optimization task.
The remained variables (second subset) are
computed on the lower level as a result of
deterministic optimization procedure. Only the
second subset of constraints is taken into account
here. Because the variables can be calculated when
the genotype is known, they correspond to a
phenotype (or part of a phenotype).
195
Dyduch T. (2006).
HYBRID EVOLUTIONARY COMPUTATIONS - Application for Industry Investment Problem.
In Proceedings of the Third International Conference on Informatics in Control, Automation and Robotics, pages 195-198
DOI: 10.5220/0001205201950198
Copyright
c
SciTePress

2. Choice of a Parent Individual or Parent
Individuals.
A parent individual is chosen from the population on
a basis of a fitness function, i.e. the probability that
an individual will become a parent is proportional to
the value of its fitness function.
3. Post Optimal Analysis and Modification of
Probability Distributions.
After each iteration post optimal analysis is done.
Its aim is to gather information about the lower level
solution (or solutions computed in the earlier
iterations). The gather information is utilized to
modify probability distributions for genetic
operators on the upper level. Thus the adaptation
mechanism differs from the adaptation mechanism
of evolutionary strategies (1+1), (μ+λ), (μ,λ)
(Michalewicz Z., 1996).
TLAEC method can be applied to optimization
tasks, which could be transformed to the form
suitable for two-level optimization algorithms
(Findeisen W., 1974).
Thus, the task: to find
Xx ∈
ˆ
minimizing
function f(x), where X is a subset of linear space X’
can be replaced by:
to find the pair
()
XVUvu =×∈
ˆ
,
ˆ
such that
)),((minmin
),(min)
ˆ
,
ˆ
(
)(
),(
vuf
vufvuf
uVvUu
VUvu
∈∈
×∈
=
==
(1)
where V(u) denotes a set of feasible vectors v
determined at a fixed value of vector u. This task
does not generally have an analytical solution unless
it is trivial. Because of that it must be solved
iteratively. Let u
i
,
v
i
denote the value of vectors u, v
computed in i-th iteration. Vector u
i
is determined on
a higher level while vector v
i
on a lower level.
Let’s present the searched variables in the
evolutionary computation terms.
Individual: pair of vectors (u
i
, v
i
), representing a
temporary point in the optimization domain
(solution in the i-th iteration),
Genotype: vector u
i
representing a temporary
point in the subspace of optimization domain,
searched at random with an evolutionary algorithm.
Phenotype: vector v
i
representing a temporary
point in the subspace of optimization domain, here
computed by a deterministic, lower level
optimization algorithm. In some cases a pair of
vectors (u
i
, v
i
) may be a phenotype.
When the genotype u
i
is established on the higher
level then the lower level optimization task is of the
form : to find v
i
such
that
),(min),(
)(
vufvufQ
i
uVv
iii
i
∈
==
(2)
where Q
i
denotes value of evaluation function of
individual (u
i
, v
i
). This task should be effectively
computable. The solution of problem (1), or point of
its vicinity
(
)
vu
ˆ
,
ˆ
can be reached with an iterative
procedure (3)
,...),(rndwhere
)),((minlim
),(min)
ˆ
,
ˆ
(
21
)(
),(
−−
∈
∞→
×∈
=
=
==
iii
i
uVv
i
VUvu
uuu
vuf
vufvuf
i
(3)
The function „rnd” is a random function, the
probability distributions of which are tuned in the
successive iterations.
3 TLAEC ALGORITHM APPLIED
TO INDUSTRY INVESTMENT
PROBLEM
The industry investment problem (Dyduch T., 2004)
can be formally described as a mixed discrete-
continuous linear optimization task. It is easy to
notice that when the discrete variables u are fixed,
the rest of the searched variables x, y, z can be
computed by means of linear programming
procedure. Because of that the vector u is assumed
to be a genotype. Thus, on the upper level the vector
u that satisfies (4) is randomly generated.
(
)
Gguu ≤−
0
(4)
Let u = u
i
where u
i
is the value of u generated in
i-th iteration. The rest of variables constitute a
phenotype. The phenotype is computed on the lower
level as a result of solving the following linear
programming task (8)-(11): to minimize
)(
312
u
i
uzcycxc −++−
λ
(5)
under constraints:
byxAz
=
−
+
(6)
kkk
huz
≤
for k=1,2,..m (7)
x, y, z, u ≥ 0 (8)
The optimization task (5)-(8) is a Lagrangian
relaxation of the primary optimization task.
ICINCO 2006 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
196

Let us notice that after solving a linear
programming task also the Lagrange multipliers λ
for equalities u = u
i
are known. This information is
a basis for the adaptation mechanism applied on the
upper level evolutionary algorithm. In order to
modify probability distributions for generation of
new vectors u, two vectors e and d are defined.
Both are used to approximate the most promising
direction of vector u changes.
Let e
k
, k=1..m, be defined by (9).
k
k
kk
g
h
e
λ
=
(9)
Let d
k
, k=1..m, be defined by (10).
k
k
kk
k
k
h
g
uh
z
d
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−=
1 (10)
The introduced adaptation mechanism has a
heuristic character. The new vector u
i+1
is
generated as follows:
1. Probabilistic choice of types of production
lines, numbers of which are to be reduced in the new
arrangement u
i+1
. The probability p
k
that the
number of production lines of k-th type will
decrease is proportional to q
k
(u
i
) where vector q is
defined (
)1,0(
∈
r is a parameter):
START
Set ItemNumber; MaxIterations;
MaxItems.
Set Counter1=Counter2=i:=1
Initial Genotype Generator
Generating a genotype u
i
.
A
dd individual {u
i
,v
i
, Q
i
}
, .
to the population set P.
Increment i and Counter1
Optimizing Module
Determining a fenotype v
i
and evaluate quality factor Q
i
.
v
i
,
Q
i
:
),(min),(
)(
vu
f
vu
f
Q
i
uVv
iii
i
∈
=
=
Calculate or estimate a part of gradient coefficients
iii
vvuu
u
vu
f
=
=
∂
∂
≅
,
)
,
(
λ
Replace the worst
individual in the population
P by {u
i
,v
i
, Q
i
}
, .
Increment
Counter2
Set Counter2:=1
Does Counter1 < ItemNumber?
YES
NO
YES
Is
Q
i
better then the worst
one in the population P?
NO
Send out the best individual
in the population as solution.
STOP
Does Counter2 > MaxIteration
or
i
> MaxItems?
YES
NO
Is Q
i
not worse then the best
one in the population P?
NO
YES
Choice of parent individual
u
p
from P with probability
proportional to Q
i
Modifying the probability
distributions of the mutation
generators with use of
λ
p
Genotype Generator
.
Generating new genotype u
i+1
by
mutation of the choosen u
p
. Increment i
Figure 1: The simplified flow diagram of TLAEC method.
HYBRID EVOLUTIONARY COMPUTATIONS - Application for Industry Investment Problem
197
⎩
⎨
⎧
>⋅+⋅−
=
=
−
1)()()1(
1)(
)(
1
iifudrudr
iifud
uq
ii
i
i
(11)
(
)
()
∑
=
=
m
k
i
kk
i
kk
i
k
uq
uq
p
1
(12)
2. Probabilistic choice of new investments. The
probability p
k
that the number of production lines
of k-th type will increase is proportional to s
k
(u
i
).
Vector u
i+1
must belong to the neighborhood of u
i
.
(
)1,0(∈r is a parameter)
⎩
⎨
⎧
>⋅+⋅−
=
=
−
1)()()1(
1)(
)(
1
iifueruer
iifue
us
ii
i
i
(13)
(
)
()
∑
=
=
m
k
i
kk
i
kk
i
k
us
us
p
1
(14)
When the new vector u
i+1
is generated then the
new linear programming task is solved and value of
function f, which plays a role of evaluation function
in evolutionary algorithm, is calculated. Let this
value is denoted as f(u
i+1
).
If f(u
i+1
) is better than the previous ones, then
vector u
i+1
replaces u
i
. If value of evaluation
function is not improved, the sampling is repeated.
Computations stop after a fixed number of
iterations, when the best value of performance index
does not change. The vectors s(u) , q(u) and
parameter r are used to improve the stability of the
procedure.
4 RESULTS OF EXPERIMENTS
The presented algorithm has been tested for many
exemplary tasks of different dimensions. The
algorithm has been implemented in Matlab
environment. The program uses a library procedure
linprog(..) implemented in Matlab, that solves linear
programming tasks. Procedure linprog(..) returns the
value of the Lagrange multipliers.
Experiments conducted with the use of the
proposed algorithm shown its high efficiency in
searching for a global minimum of a discrete-
continuous programming task.
In order to test ability of the algorithm for the
real problems, the special generator of data has been
designed and implemented. The semi-realistic
investment problems of high dimensions were
generated and tested. When parameters r and
MaxIteration were fixed, the aim of further
experiments was three-fold:
to test TLAEC algorithm convergence for
different problems of the same size,
to test TLAEC algorithm efficiency for the
different starting points when the data of problem
are fixed,
to compare the efficiency of TLAEC algorithm
with efficiency of TLEC algorithm, which has the
adaptive ability withdrawn.
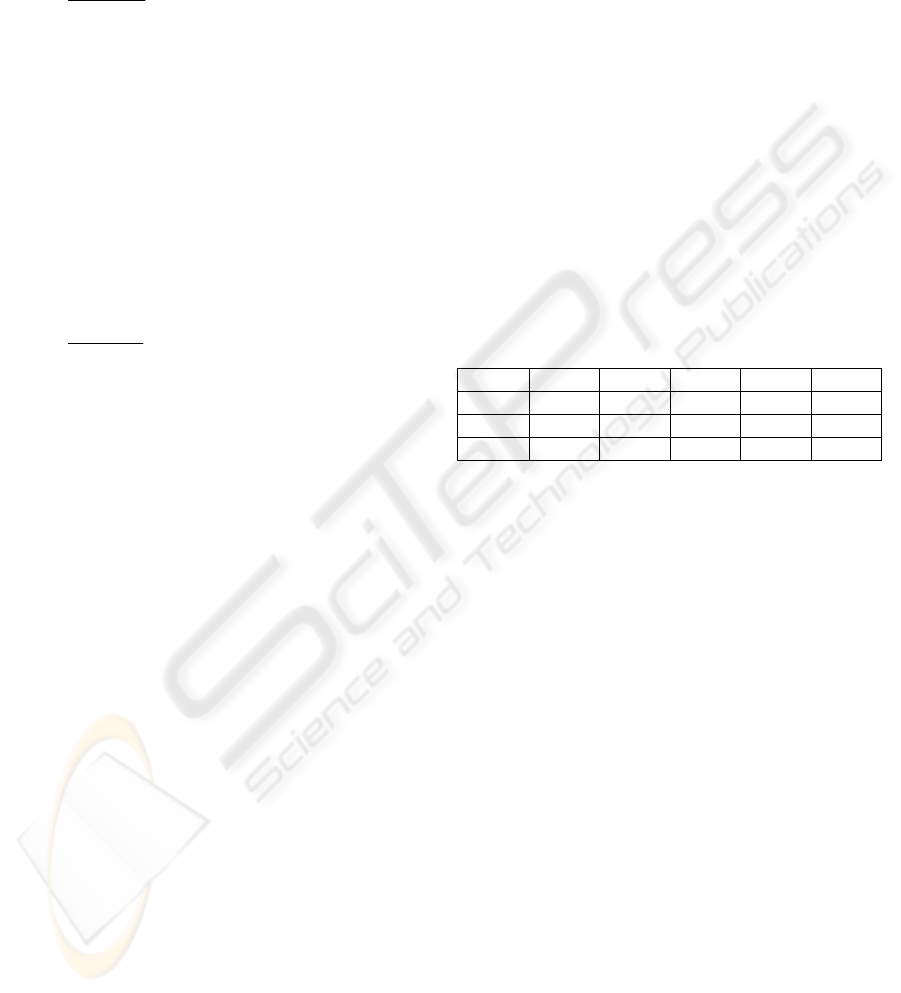
Table 1 shows some data collected during
experiments on stability and accuracy of the TLAEC
and TLEC methods, applied 8 times to each of 5
investment problems of 3x24x34 size. Q
0
are initial
values of minimized criterion while Qopt are their
optimal values.
Table 1
Q
0
3316,1 -88,4 -2860,3 5121,3 2981,2
TLEC 2856,8 -345,4 -3321,2 4767,0 2573,9
TLAEC 2562,5 -1362,7 -3671,0 4380,4 2360,7
Qopt 2491,1 -1396,0 -3671,0 4332,1 2334,6
The algorithm starting from different points
found different but stable solutions, which fitness
function values were similar. Contrary to it, TLEC
algorithm (without the adaptive ability) computed
unstable solutions.
REFERENCES
Dyduch T., 2004. Adaptive Evolutionary Computation of
the Parametric Optimization Problem. Lecture Notes
In Artificial Intelligence (3070), Springer-Verlag,
Berlin , pp. 406-413
Dyduch T,.Dudek-Dyduch E., 2005. Two Level Adaptive
Evolutionary Computation Proc. of 23
rd
IASTED Int.
Conf. Artificial Intelligence and Applications,
Insbruck, Austria pp. 42-47
Eiben A.E., Hinterding R., Michalewicz Z., 1999.
Parameter Control in Evolutionary Algorithms, IEEE
Trans. On Evolutionary Computation, vol.3, No 2, pp.
124-141
Findeisen W., 1974. Multi-level control systems. (in
Polish) PWN Warszawa
Michalewicz Z., 1996. Genetic Algorithms + Data
Structures = Evolution Programs. Springer-Verlag.
ICINCO 2006 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
198
