
A NEW HYBRID SAMPLING STRATEGY FOR PRM PLANNERS
To Address Narrow Passages Problem
Sofiane Ahmed Ali, Eric Vasselin, Alain Faure
GREAH, Le Havre University, 25 Philippe Lebon street BP 540-F76058, Le Havre, France
Keywords: Probabilistic path planner, probabilistic roadmap, Robot Path Planning, Randomized Algorithms, Random
sampling.
Abstract: The probabilistic path planner (PPP) is a general planning scheme that yields fast robot path planners for a
wide variety of problems, involving high degree of freedom articulated robots, non holonomic robots, and
multiple robots. This paper presents a new probabilistic approach for finding paths through narrow
passages. Our probabilistic planner follows the general framework of probabilistic roadmap (PRM), but to
increase sample density in difficult areas like narrow passages, we define two sampling constraints in order
to get much more points than a classic PRM gets in such areas. We simulate our planner in 2D
environments and the simulations results shows good performance for our planner.
1 INTRODUCTION
Robot path planning, which asks for the computation
of collision free paths in environments containing
obstacles, has received a great deal of attention in
the last decades The basic problem is about
computing a collision free-path that brings the robot
from his current position to some desired goal
position. The space where the robot and the
obstacles are physically present is called the
workspace
W
, using the formalism introduces by
(Lozano, 1983) the planning is mostly performed in
another space, the configuration space
C . Each
placements of the robot in
W is mapped to a point
in
C . The portion of C corresponding to collision-
free placements of the robot is referred to as the
free-configuration space
free
CS . At the GREAH
laboratory, a dynamic model of car like robot was
done (Guerin 2005) and our work is to design an
efficient path planner for this mobile robot.
During the past decades probabilistic roadmap
(PRM) (Kavraki, 1994) (Horsch, 1994) (Svestka,
Overmars, 1995) (Svestka, Vleugels, 1995) has
emerged as a powerful framework for path planning
of robots with many degrees of freedom. The main
idea of (PRM) is to sample at random a robot’s
configuration space and connect the sampled points
to construct a roadmaps graph, which captures the
connectivity of the free space. Despite the success of
(PRM) planners, path planning with many degrees
of freedom is difficult and even uncertain.
The first difficulty is laid in many cases to the higher
computational cost paid by (PRM) to construct the
roadmap graph, indeed (PRM) spends a lot of time
in checking collision-free connections between all
the sample points.
The second difficulty remains a classic problem of
(PRM) planners. Sampling points in difficult areas
like narrow passages pose significant problem,
because narrow passages have small volumes and
the probability of sampling from small sets is low.
In this paper, we propose a new probabilistic
approach that reduces the computational cost of
classic (PRM) planners and increases sample density
of points in narrow passages.
The key idea to reduce the computational cost of
(PRM) planner is to construct a single road instead
of roadmaps, our planner connects the starting
configuration to the goal configuration by generating
random configuration from
free
CS , and constructs
one single local path that connect this current
configuration to the immediate configuration
generated before by our planner. Thus, collision-free
connection is made only between two
configurations, instead of the all existent
configurations. We exploit the notion of “visibility
set” (Barraquand, 1997) (Hsu, 1999) and also used
561
Ali S., Vasselin E. and Faure A. (2006).
A NEW HYBRID SAMPLING STRATEGY FOR PRM PLANNERS - To Address Narrow Passages Problem.
In Proceedings of the Third International Conference on Informatics in Control, Automation and Robotics, pages 561-564
DOI: 10.5220/0001220405610564
Copyright
c
SciTePress

in (Nissoux, 1999), to define a termination condition
for our planner. Two points of the configurations
space are considered visible to each other if they can
be connected by a collision-free straight line path.
To improve the sample density in narrow passages
we define a local planner that given two
configurations, sample the path connecting them,
and extract a new collision-free straight line path.
We add to these local planner two constraints. The
predefined distance that our local planner uses to
sample near the current configuration, and the
angular constraint that guarantee always for our
mobile robot moving towards the goal configuration.
Section (2) reviews related work on sampling
configurations in narrow passages, section (3) gives
an overview of our planner, section (4) analyses our
algorithm section (5) presents some resulting paths
from simulations and comments them, section (6)
make a general conclusions about our planner and
presents the future extension of this work.
2 RELATED WORK
The difficulty posed by narrow passages and its
importance, were noted in early worm in PRM
planners. One possibility is to sample more densely
near the obstacles boundaries (Boor, 1999) (Collins,
2003). The Gaussian sampler uses this idea (Boor,
1999). However, in some cases many points near
obstacles boundaries lie far from narrow passages
and do not improves the connectivity of roadmaps.
Other approaches to narrow passages sampling
includes dilating free spaces (Hsu, 1998), and
retracting to the medial axis of free spaces
(Wilmarth, 1999). Both approaches require a high
geometric computation time in high dimensional
configuration spaces
3 OVERWIEW OF THE
PLANNER
In this paper we follow the general framework of
(PRM), but our planer computes one single road
which connects the starting and the goal
configuration with always sampling random
configuration from
free
CS . The local planner then,
connects only the current randomly selected
configuration with the previous configuration added
before. We name our planner the probabilistic single
road planner (PSRP). The idea is to try to get a
simple algorithm that reduces the computational cost
of (PRM). Intuitively by checking collision free
connection only between two milestones our (PSRP)
will save a lot of computation time rather than
spending at checking collision free connection
between all milestones generated by (PRM). The
design of our algorithm is based on tree components
defined below.
3.1 Visibility Path
Consider a robot
ℜ
moving in a workspace
ℑ
let
CS be the configuration space of the robot. Let
free
CS be the collision free configuration space
in
ℑ
. Let L be any local planner that computes a
path
),(
'
qqL
(e.g. straight line segment) between
two given configurations
q and
'
q . We define the
visibility domain of a configuration
q for L by:
}
{
)1(,),(,)(
''
FqqLFqqVisi
L
∈∈=
We use this relation to define a new domain of
visibility. Given
goal
q
, two configurations
q
and
,
q the path computed by the local planner, is
sampled at
n points
i
x and the new visibility
domain is defined as following:
{
}
)2(,),(,)( FqxLFqxVisi
goaligoaliL
∈
∈
=
Where
free
CSF
=
3.2 Distance Sampling
Our local planner uses a threshold distance to
connect only milestones within this predefined
distance.
3.3 Angular Sampling
The second constraints is about an angular sampling
to guide the search of a solution path toward the goal
configuration see (Figure 1) In figure (1) we
consider that our algorithm samples milestone1 and
is able to sample two possible milestones (milestone
2 and )2
'
. For each possible milestone our planer
put a predefined angular constraint
intconstra
i
θ
on the
difference of the size of the angle between milestone
1 and one of the possible current milestones
2 ,
'
2
ICINCO 2006 - ROBOTICS AND AUTOMATION
562

and, the angle between milestone 1 and the goal
milestones.
2
M
Goal configuration
int
1
constra
θ
'
2
M
int
2
constra
θ
1
M
Figure 1: Angular sampling.
The algorithm of angular sampling is given as
follows:
Algorithm1: Randomized angular sampling
1. Repeat
2. Pick M1, M2 from
F /*M1, M2: milestones
3.
←
1
θ
Angle (
goal
MM
1
,
Ox
).
4.
←
2
θ
Angle (
21
MM ,
Ox
)
4 if (
int21 constra
θ
θ
θ
≤− ) then add M1, M2 to G
5. Else goes to 1.
4 ANLYSES OF (PSRP)
Our algorithm is designed to reduce computational
cost resulting from (PRM) and this, by using the two
sampling constraints we defined above, the notion of
visibility (3.1) and. local geometry tests. We define
the function
f as follows:
1=f If
freegoali
CSqxL ∈),( (3)
The key idea of this strategy is about the local path
computed between two configurations
q
and
'
q (i.e.
two milestones) randomly picked. Clearly our
algorithm samples this path at points
i
x , and a
collision free test is made on each point, a path is
computed between
q and the last
i
x returning a
positive response for the collision free test.
We also use the idea of hybrid sampling, by
combining our local planner, with the two
constraints presented in (3.2) and (3.3) to increase
sampling in narrow passages. A simplify version of
our algorithm is given:
1.
start
q
2
0←f
3. M1
start
q←
4 while (
0=f )
5. Select a random free configuration M2
6. Compute
d,,
21
θ
θ
/* d : the distance between
M1and M2
7. If (
))()^(
maxint21
Dd
constra
≤≤−
θθθ
then
8 sample line segment M1M2 at
i
x points
9. Check collision at each
i
x for M1M2 and
i
x
goal
q
10 if (
)1
=
f
then
11. Create edge (
)
1 i
xM ∪ edge ( )
goali
qx
12 else create edge
()
1 i
xM
13 add
i
x to
G
i
xM
←
1
Assume that (PSRP) sample a milestone near
obstacle, indeed our local planner compute local
paths between one milestone and the last
i
x point
returning a negative response for the collision free
test, thus we have a big probability to get one
milestone near an obstacle boundary. By choosing a
small predefined distance value, for example the
width of the narrow passages, and the angular
constraint to be less or equal to
2/pi , we increase
the sampling points at the narrow passages figure(2).
init
q
goal
q
Figure 2: Computed path in narrow passages.
5 SIMULATIONS
We simulate our algorithm on Matlab/simulink
software. To examine our planner performance we
simulate it on several difficult environments with
variation for each, the predefined distance and the
angular opening constraints. We present some
interesting resulting paths in the figures below:
Figure 3: Computed path1 by the first variant of PSRP.
A NEW HYBRID SAMPLING STRATEGY FOR PRM PLANNERS - To Address Narrow Passages Problem
563
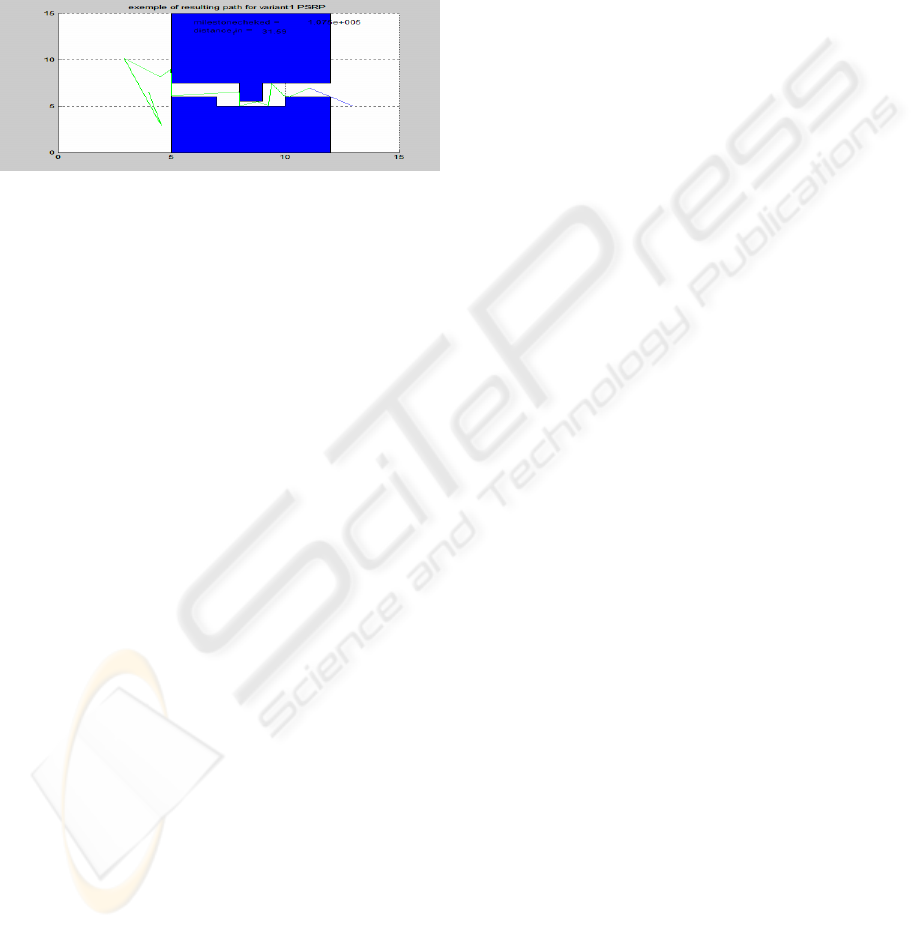
Fig.3: This environment contains two obstacles,
separated by a small narrow passage area. We set the
predefined distance constraint manually to be in [0,
8], the angular constraint was taken in [0, ]2/
π
.
The path computed in green colour presents the first
variant algorithm contribution, the second path in
blue colour shows the contribution of the visibility
path component.
Figure 4: computed path2 by the first variant of PSRP.
Fig.4: The environment in Fig.9 presents many
narrow passages. Our PSRP check a large number of
milestones thus, increase
mil
T , but sample only well-
placed milestones
6 CONCLUSIONS AND FUTURE
WORK
We have presented a new probabilistic approach to
address the narrow passages problem. The
simulating results show that (PSRP) gives an
efficient response for this problem. The main issues
that we are interested in exploring further in the
future, is about the predefined distance and the
angular constraints that are chosen manually, a
promising approach is to adjust these two constraints
through on- line learning by taking into accounts the
obstacles positions.
REFERENCES
T.Lozano-Perez., “Spatial planning: A Configuration
space approach”, IEEE Trans. On computers,
Vol.32(2), pp.108-112, 1983
F.Guérin, E.Leclerq, A.Faure, M.Gorka. commande d’un
robot par vision artificielle. JESA 2005.
L.Kavraki and J.-C. Latombe. Randomized preprocessing
of configuration space for fast path planning. In Proc
IEEE Internat. Conf. on Robotics and Automation,
pages 2138-2145, San Diego, USA, 1994.
Th.Horsch, F.Schwartz, and H.Tolle. Motion planning for
many degrees of freedom-random reflections at C-
space obstacles. In proc. IEEE Internat. Conf. on
Robotics and Automation, pages 3318-3323, San
Diego, USA, 1994.
P.Svestka and M.H. Overmars. Motion planning for car-
like robots using a probabilistic larning approach.
Inter. Journal of Rob. Research, 1995.
P.Svestka and J.Vleugels. Exact motion plannig for
tractor-trailer robots. In Proc IEEE Internat. Conf. on
Robotics and Automation, pages 2445-2450, Nagoya,
Japan, 1995.
J.Barraquand, L.E.Kavraki, J.-C.Latombe, T. Li, R.
Motwani, and P.Raghavan, “A random sampling
scheme for path planning” International Journal of
Robotics Research, vol.16, no.6, pp.759-774, 1997.
D.Hsu, J.-C. Latombe and R.Motwani, “path planning in
expansive configuration spaces”, International Journal
of Computational Geometry & Applications, vol.9, no.
4&5, pp.495-512, 1999.
C. Nissoux, T.Simeon and J.-P. Laumond “ Visibility
roadmaps” in Proceeding of the 1999 IEEE/RSJ
International Conference on Intelligent Robot and
Systems, 1999, pp.1316-1321.
V.Boor, M.H.Overmars, and A.F. van der stappen “The
Gaussian sampling strategy for probabilistic roadmap
planners” in Proceedings of the 1999 IEEE
International Conference on Robotics and Automation,
1999, pp. 1018-1023.
A.D.Collins, P.K. Agarwal, and J.L.Harer, “HPRM: A
hierarchical PRM,” in Proceeding of the 2003 IEEE
International Conference on Robotics and Automation,
2003, pp.4433-4438.
D.Hsu, L.E. Kavraki, J., C. Latombe, R. Motwari, and S.
Sorkin, “On finding narrow passages with
probabilistic roadmap planners” in Proceedings of the
3
rd
Workshop on Algorithmic Foundations of Robotics
1998, pp. 141-153.
S.A.Wilmarth, N.M. Amato, and P.F. Stiller, “Motion
planning for a rigid body using random networks on
the medial axis of the free spaces” in Proceedings of
the 15
th
Annual ACM Symposium on Computational
Geometry, 1999, pp.173-180.
ICINCO 2006 - ROBOTICS AND AUTOMATION
564
