
Adaptive Control Network for Multi-Robot Exploration
Jose Vazquez and Malcolm Chris
IPAB, School of Informatics, Mayfield Road,
EH75RG, Edinburgh, UK
Abstract. This work addresses the problem of exploring an environment with
a team of communicating robots. Exploration can be performed more efficiently
when robots are able to communicate and coordinate their actions. We propose an
adaptive control approach to keep the robots as a single connected network. In this
approach a control network is created at the beginning of the exploration based on
the communication network. As the robots traverse the environment the control
network is updated to enhance connectivity. The approach has been implemented
for Line of Sight and Radio Frequency technologies. Our approach has been com-
pared with coordination approaches that rely on fixed networks. The results show
that our approach performs better than these fixed network approaches.
1 Introduction
The problem of exploration is an important problems in robotics because of applica-
tions such as rescue, mowing, or cleaning in which the complete exploration of area
is the main objective. In this paper, we consider the problem of exploring unknown
environments using teams of mobile robots with local communication systems.
Previous research in multi-robot exploration indicates that effective exploration
using multiple robots requires coordination through communication [6]. Low power
robots are likely to have limited communication range. As such robots traverse the en-
vironment they form a Mobile AD HOC communication NETwork (MANET). Keeping
this MANET connected is a difficult task. Previous work relies on a fixed control net-
work to keep the communication network connected. The imposition of a fixed network
limits the mobility of the robot network, slowing down the exploration process.
In this paper we present the BERODE (Behaviour based decentralized) architecture.
The BERODE architecture implements an adaptive control approach to maintain the
communication network. In BERODE the robots update the control network to improve
the communication conditions. The robots assume behaviours according to their status
in the control network. The behaviours are designed to avoid collisions between the
robots, encourage the exploration of unknown areas and keep the MANET connected. In
effect the exploration algorithm of the system emerges from the interaction of individual
behaviours within the environment.
The BERODE architecture has been implemented for RF (Radio Frequency) and
LOS (Line of Sight) communication models. In the RF implementation the robots are
assumed to be able to measure the Received Signal Strength Level (RSSL) and use this
Vazquez J. and Chris M. (2006).
Adaptive Control Network for Multi-Robot Exploration.
In Proceedings of the 2nd International Workshop on Multi-Agent Robotic Systems, pages 44-53
DOI: 10.5220/0001222700440053
Copyright
c
SciTePress

value to keep the communication network connected. In the LOS implementation the
robots use their Cartesian distances to emulate the RSSL value.
To enable scalability to large numbers of robots the BERODE architecture imple-
ments a hierarchic approach to distributing information. In BERODE the robots share
information frequently at the local level and less frequently at the global level. The local
level is formed by the robots that are within a k-hop distance in the control network.
Compared to coordination approaches that rely on fixed networks, BERODE has a
better performance, in that it explores the environments more efficiently and keeps the
MANET connected for more time.
2 Related Work
The use of robot teams to explore unknown environments has been the subject of ex-
tensive research [8]. Exploration tasks can be completed more efficiently when robots
share relevant information with each other [6]. To enable information exchange the
robots have to maintain communication between the members of the team.
In previous research this problem has been addressed by maintaining fixed LOS
communication network topologies. Leader-follower relations are imposed on all the
robots with the exception of a team leader. The team leader directs the exploration
while the rest of the team follows it.
Wagner [12] developed algorithms to cover an area. He identified trade-offs between
area coverage and communication safety concluding that coverage degrades when plans
are communication-focused. Powers [4] proposed a navigation behaviour called VBCP
(Value-Based Communication Preservation) to preserve communication while travers-
ing an environment. VBCP calculates movement vectors using the RSSL from the
robots, the robots’ positions and map-based predictions of the RSSL for nearby positions
to the robot position. Ulam [9] proposed a reactive approach to recover communication
in a surveillance mission. Several recovery strategies were proposed. He concluded that
there are still remaining issues to determine the best strategies to recover communica-
tions in large-scale teams. Kantor’s [1] work focuses on surveillance where navigation
is achieved by relying on an RF network deployed a priori. Navigation was success-
fully achieved but the authors remarked that the minimal density of sensors required to
achieve successful navigation was unclear.
Recently Thibodeau [7] proposed an adaptive topology algorithm where a leader
robot frequently builds an MST (minimum spanning tree) control network. Thibodeau
compared his approach to fixed configuration topologies (e.g. chain, fixed tree). The
comparison was based on the time to build a complete map. Thibodeau’s approach
performs better than fixed configurations.
The architectures and strategies in the literature that maintain communication have
relied on a priori definitions of robot communication relations. In real world environ-
ments as the robots explore the environment a priori relations limit the mobility of the
network. We argue that the relations between team members should be determined dy-
namically to gain flexibility. Our approach is similar to Thibodeau’s approach because
we implement an MST control network, but in our approach the number of explorers
varies dynamically.
45

3 The BERODE Architecture
Our BERODE architecture is based on behavioural roles such as Explorer and a com-
munication Maintainer. These roles reactively adapt to the dynamic conditions of the
MANET formed by the robots as they explore an environment. The MANET is kept fully
connected by creating and updating an MST control network, a subnetwork containing
only the necessary connections (control connections) to keep the MANET connected.
The robots select their behavioural role based on their network status and their in-
ternal state. The network status of a robot comprises the safety level and the set of
constraints. The safety level for a robot is determined by the signal quality of its con-
nections on the MST control network. The signal quality depends on the communication
technology. In RF technologies the RSSL (Received Signal Strenght Level) is typically
available to the robots. This value is used as the signal quality, whereas in LOS tech-
nologies the Cartesian distance between the robots is used to estimate the signal qual-
ity. A robot is on a safety level if all of its connections have at least that safety level.
BERODE implements three safety levels with the following decreasing order in safety:
safe, precautionary and unsafe. Depending on the safety level a set of constraints is
imposed. In the safe level the set of constraints is empty because the signal quality for
the control connections is above the safe threshold (σ
safe
). In the precautionary level
the set of constraints is formed by the control connections. In the unsafe level the set of
constraints is formed by the control connections for which the signal quality is below
the unsafe threshold (σ
unsafe
). We argue that a robot could move out of the unsafe
level faster when it is constrained only by the subset of unsafe connections instead of
the complete set of control connections [10]. It is desirable that σ
safe
>>σ
unsafe
to
avoid the risk of disconnecting the MANET because of the temporary exclusion of some
control connections.
According to its behavioural role, a robot exhibits some interest or none at all in the
exploration task. As a result, a variable number of robots direct the exploration towards
unexplored areas while the rest of the robots keep the network connected.
The behavioural roles generate reactive plans that keep the robot’s constraints within
communication range. The plans are based on the imposition of virtual forces by the
robot’s constraints. Virtual forces are attractive/ repulsive relations between pairs of
robots. These forces are modelled as virtual springs where the free spring length is a
function of the signal quality and behavioural role of the robot and its connections. The
reactive plans randomly sample nearby positions to the robot position and generate a
plan to move to the position where the energy for the constraints is minimized.
Robots are also attracted to unexplored areas; the attractiveness of an unexplored
area is a function of its size, the path length and the predicted communication safety
level at that location. This level is the estimated signal quality based on the current
positions of the robots.
Within the robot network, information is distributed to the point where all the robots
share consistent models of the environment. The information is distributed using the
MST control network. Each robot shares its positional and sensorial information with
the rest of the team periodically. Information is shared at two levels: frequently at the
local level and less frequently at the global level. The robots have to cope with the
delays in the reception of information.
46

The environment is represented by means of a feature based map. Each robot builds
and updates it’s own map. An Extended Kalman Filter (EKF) is used for localization.
Robots extract features from their sensors and update their representation. Extracted
features are distributed among the team of robots. Robots incorporate the received fea-
tures with their locally extracted features. The following sections describe the main
components of the BERODE architecture.
3.1 The Adaptive MST Control Network
In BERODE the MANET is kept fully connected by creating and updating a MST control
network. The MST control network is calculated at the start of the exploration based on
the MANET and a signal criterion. The signal criterion depends on the implementation;
for instance for typical RF technologies the RSSL between a pair of robots is the link
cost. After the initial calculation the robots retain knowledge of their K-MST control
network (local network). The local network for a robot is the network that contains all
the robots within a k-hop distance.
The MST control network can be modified either partially or completely by robots
over time. Merging and validation mechanisms are implemented to ensure that the
robots maintain the same MST control network. Robots periodically re-evaluate their
local network to improve connectivity; if necessary they modify the local network and
inform all the robots within the local network.
3.2 Control Architecture for the Robots
The robots’ control architecture is the same regardless of their behavioural roles. The
architecture has two control levels: social and internal. At the social level the robot se-
lects its behavioural role. The modules at this level are the same for all the behavioural
roles, while at the internal level the behavioural roles have different modules. At the in-
ternal level the current behavioural role generates reactive plans to meet the constraints
generated at the social level. These plans are adapted if necessary to ensure safety.
Fig. 1 presents the control and information flow diagrams for the robots’ control
architecture. The modules receive information either periodically or on an event ba-
sis. The Communication Manager that handles the information exchanged between the
robots in the network is composed of four modules. The K-MST Control Module re-
ceives the messages related to the status of the network. These messages are received
either periodically or on an event basis. This module keeps track of the constraints from
which the virtual forces are derived and generates a network event when a change in the
set of the constraints or the roles of the constraints is detected.
The Behaviour Selection Module is called once a network or an internal event oc-
curs. Internal events occur when a robot achieves its current task, detects a change in
the safety level, or modifies either the local network or the MST control network.
The Local and Global World Model modules are temporary storage modules to
handle the local and global features received from the robots in the network. Global
features are integrated into the local feature map in the map building module. Local
features are used to aid navigation but they are not integrated in the local feature map.
47

Fig.1. Control architecture for the robots in BERODE.
The observations of these features are integrated to the map as a part of the global fea-
tures. These modules also store and periodically transmit the local and global features
observed by the robot.
The map building module builds a map of the environment containing line and
point features. Features are extracted from raw sensor data. A low cost platform based
on sonar and infrared sensors is used to sense the environment. A feature management
process extracts, segments and associates the features. The extracted features are then
used to update the EKF and improve the estimates of the locations of the robots and
features. A priori structural knowledge (e.g. wall parallelism) is used to improve the
quality of the maps. Fig. 2 presents an example of the maps built by the robots. In the
experiments the robots start grouped in the upper left area. We assume the robots begin
in known locations in a close group. In practice this could be achieved in many ways,
such as started them one after the other on the same spot.
a) Environment b) Map built
Fig.2. An office like environment used in the experiments.
48

All non-Explorer robots make predictive plans to keep the MANET connected. They
sample positions near the robot, generating a plan to move to a position where the en-
ergy from the spring forces and the obstacles is minimised. Obstacles generate repulsive
potential fields that are a function of the distance. The spring forces generated by the
constraints are a function of the difference between the current signal quality and a de-
sired signal quality. The desired signal quality is a threshold whose value depends on
the behavioural roles of the robots [10]. In the RF model the RSSL is used as the signal
quality, whereas in LOS communication the Cartesian distance is used to emulate the
signal quality value.
The Explorer robots plan movements towards unexplored areas by estimating the
signal quality in the unexplored areas, and selecting the most attractive area. This is the
frontier with the largest utility in the safest hierarchic level. A frontier is a portion of
free space that is adjacent to unknown space in the projected grid map. The utility of a
frontier is the information gain value minus the cost of idealized travel to the frontier
from the robot position. The frontiers have a hierarchy level based on the communi-
cation coverage at the frontier position. The hierarchy levels minimize the number of
exploration failures. An exploration failure occurs when a robot generates a plan to a
frontier which it aborts because of possible loss of communication.
3.3 The Behavioural Roles
BERODE implements four behavioural roles: Recoverer, Explorer, Maintainer and
Pusher. These roles are manifested under the following conditions:
1. Recoverer: robot is in the unsafe level.
2. Explorer: The robot is in the safe level, has one connection in the MST control
network and there is at least one unexplored area predicted as communication safe.
3. Maintainer: The robot is in the safe or precautionary level, and has more than one
connection in the MST control network.
4. Pusher: The robot is in the safe or precautionary level, has one connection in the
MST control network and no unexplored areas predicted as communication safe.
The first three roles are based on previous research on the areas of network mainte-
nance [7] and recovery [9]. In this previous research there is only one robot that ex-
plores (Explorer) the space while the rest of the team (Maintainers) keep the network
connected. BERODE, in contrast with previous approaches, allows several robots to
explore the space at the same time. This speeds up the exploration process but under
certain circumstances conflicts arise between explorations pulling in diferent directions.
The Pusher role resolves these conflicts on the network in a decentralized fashion. One
of the pulling Explorers becomes an active tail: a Pusher. A Pusher robot is the result
of the lack of unexplored areas that are communication safe. As the Pushers traverse
the environment they may discover safe unexplored areas, and can then transition to the
Explorer behavioural role.
The goal for non-Exploring robots is essentially the same: Move towards the lo-
cation that maximizes the predicted OSQ (overall signal quality) for the constraints;
the difference is in the parameters of the virtual spring model. These parameters are a
49

function of the behavioural roles of the robots. This type of parameterization generates
local interactions that induce leader–follower motions in the robot network where the
Explorers direct the exploration and the Pushers accelerate the movement in the explo-
ration directions [10]. The goal for the Explorer behavioural role is to move towards
unexplored areas while maintaining a safe connection.
The effect of an unsafe connection on the global behaviour is the contraction of the
network until the unsafe connection recovers a higher quality level and is detected as
precautionary or safe at which point the robots continue the exploration. When a pair of
robots detects an unsafe connection they transition to the Recoverer role and back track
their most recent movements. Afterwards if the connection is still unsafe they move
towards each other according to the last received positions.
3.4 Hierarchical Information Distribution
To achieve coordination and build an environmental model efficiently the robots have to
exchange information periodically. In BERODE each robot is in charge of distributing
its information. It is not surprising, as Winfield [13] has shown, that the delay in the
propagation of information distribution between a pair of nodes is proportional to the
number of retransmissions. It is expected that for typical indoor environments pairs of
robots with close positions are in either direct contact or within a small hop distance
on the MST control network. Moreover, these close robots require a higher degree of
coordination to guarantee that the MANET is kept connected. The robots transmit bea-
con signals that contain their position. They determine their network status based on
the beacon signals.
To maximize the coordination and minimize communication costs, two levels of
communication are proposed: local and global. The local level is composed of the robots
in the local network (within k-hops) while the global level is composed of all the robots.
The robots transmit their current goal and recent local features to all the robots in
their local network with a frequency less than that of beacon signals (typically 10%).
The recent local features are the features that have been extracted since the last trans-
mission at the local level. These features are used for planning purposes as temporary
aids, but are not incorporated into the feature map. The global features are transmit-
ted to all robots less frequently than local features to local robots, typically 25% less
frequently. The global features are the features that have been extracted since the last
transmission at the global level. These features are integrated to the robots’ maps using
the same process as for locally extracted features.
local robots maintain consistent environment models most of the time while distant
robots have weakly-consistent maps. The exploration process is not impaired by the
weakly-consistent maps of distant robots because they do not directly coordinate.
4 The Communication Models
The experiments were conducted in simulation using the Webots simulator [3]. To im-
prove the realism of the simulation we derived sensor models from a real robot [11],
and derived radio communication propagation characteristics from manufacturers data
50

[2]. Two types of communication have been modelled: LOS and RF. The following as-
sumptions have been made in the implementation of these models: If two robots are
within range of communication (direct connection) there is no loss of information; the
communication bandwidth for the robot connections is large enough to cope with the
exchange of information regardless of the robot positions; the delays in communication
are proportional to the number of retransmissions required based on the MST control
network regardless of the distance between the robots.
The effect of interference is modelled by delaying the messages a random time with
a certain probability. In the LOS model any obstacle in the direct path of the signal
blocks the entire signal. The RF model is based in Rappaport’s model [5]. This model
calculates the strength of a signal based on the path loss in decibels (dB). The path loss
is the amount of power lost by a signal due to the transmission distance, the number
of obstacles in the direct path of the signal and the properties of these obstacles (e.g.
material and density). The experimental results for the attenuation of the RF signals for
several materials (in dB/m) for a frequency λ=2.4 GHz are used in the simulations [2].
The multi path effects are modelled by adding Gaussian Noise (with mean zero) when
there is no LOS between transmitter and receiver.
5 Comparison with Fixed Robot Networks
In BERODE the robots recalculate the MST control network either partially or glob-
ally. The recalculation of the network aids the exploration process because it enhances
the connectivity of the network and adapts it to local geography. To determine the ef-
fectiveness of the adaptability of BERODE we compared its performance with several
fixed networks. In fixed networks the MST control network is created at the start of the
exploration and remains the same through all the process. The fixed networks use the
same BERODE architecture.
Three types of fixed networks are proposed for the comparison: maximum, mini-
mum and k−connections connectivity. The maximum connectivity tries to create star
like topologies whereas the minimum connectivity tries to create column like topolo-
gies. The k-connections connectivity tries to create a network in which all the robots
have k connections.
In the experiments the robots transmit their beacon signals every second. The pro-
cess of sensing a location takes 1.8 seconds (sensing step). The robots share their local
and global features every 10 and 40 sensing steps respectively. The size of the team of
robots was n=4, ... , 16 for the environment of Fig. 1. The local network sizes were
k= 2, 4, . .. , k/2 for each team size. In our research we have found a trade-off between
the exploration time and the size of the local network [10]. For small values of k the
trade-off is optimal because there is a linear increase in the communication bandwidth
as k increases. For larger values of k the increase tends to be quadratic.
We ran 10 trials for each combination of robot and local network size. Several en-
vironments were tested to validate the results. For the fixed networks the information is
always transmitted at the global level.
Two metrics were used in the comparison: the speedup factor and the percentage of
time fully connected. The speedup factor is the ratio between the exploration times for
51
a single robot and a robot network of a certain size. The speedup factor describes the
scalability of the control approach with respect to the number of robots.
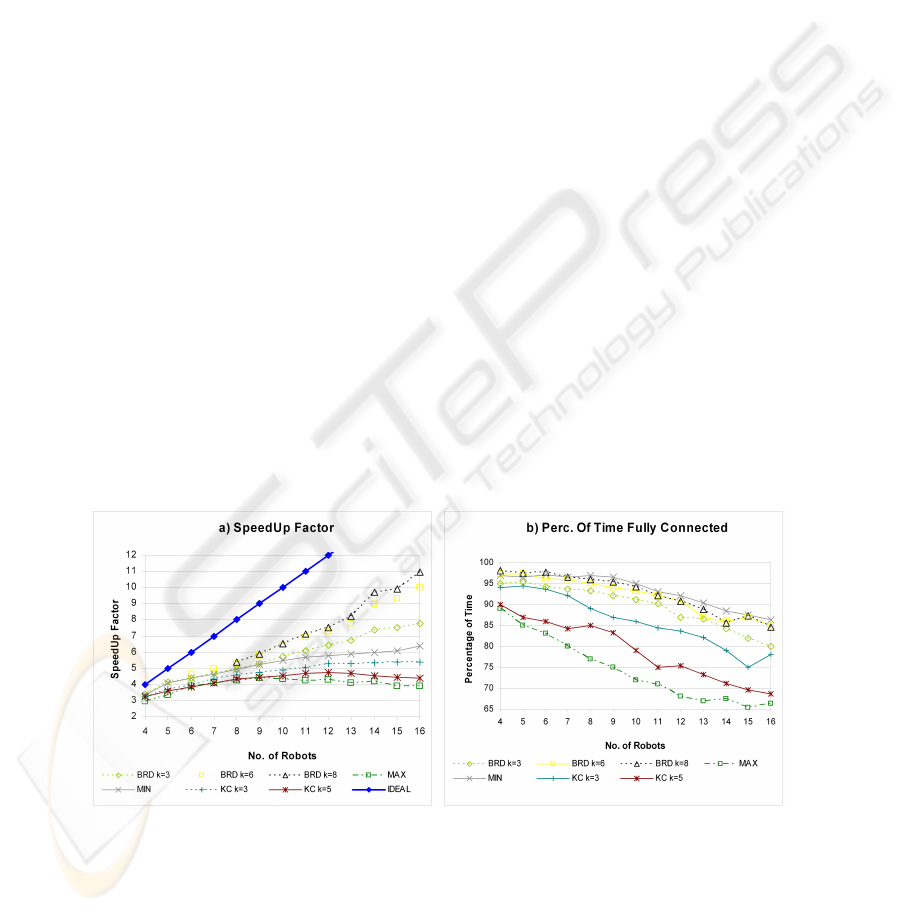
Fig. 3 shows the results in one of the tested environments comparing BERODE
using three local network sizes (BRD k) against four fixed networks: maximum connec-
tivity (MAX), minimum connectivity (MIN) and k−connections for branching factors
k=3,5 (KC k=3 and KC=5 respectively). Similar trends were observed when using the
LOS communication model. From Fig. 3(a) it is observed that regardless of its local
network size BERODE has significantly better speedup factors than the fixed networks.
The closest speedup factor for a fixed network was 8.39% worse on average compared
to BERODE with k=3. It is also observed that fixed networks with smaller branching
factors (MIN and KC k=3) have better speedup factors than those with larger branching
factors (KC k=5 and MAX). These networks have a linear increase in the speedup factor
with respect to the number of robots up to a certain number of robots. Afterwards there
is only a slight increase if not zero increase in the worst case.
From Fig. 3(b) it is observed that regardless of the local network size in BERODE
the percentage time slowly decreases in a linear fashion as the number of robots in-
creases until a certain number of robots is reached. Afterwards the percent of time
stabilises at a certain percentage. It is also observed that the minimum connectivity
type maintains similar if not better percentages than BERODE. 0.78±0.2% better than
BERODE with k=8.
BERODE has a better performance than fixed networks. BERODE has significantly
better speedup factors than the fixed networks and keeps the MANET connected more
time than the fixed networks. Although not as efficient as BERODE’s adaptive networks,
fixed networks with column like control formations are a good solution for robot net-
works of medium sizes (n <12) using RF technologies. These networks are suitable for
indoor environments with little clutter and might be preferred over BERODE because
of their simplicity.
Fig.3. Comparison of BERODE with local network sizes k = 3, 6, 8 against fixed networks
using the RF model.
52

6 Conclusions
In this paper, we presented the BERODE architecture to explore and map an initially
unknown environment using a group of robots with local communication capabilities.
The robots are kept as a single connected and adaptable communication network to
guarantee the coordination between the robots. BERODE is scalable with respect to
communication because it implements a hierarchical approach to distributing informa-
tion. Note that this is hierarchical broadcasting within an adaptive decentralised system,
and involves no loss of robustness. We presented experimental simulations that assumed
two types of communication: LOS and RF. In the LOS communication any obstacle in
the path of the signal blocked the signal while in the RF model a part of the signal is
absorbed by the obstacles.
BERODE maintains the communication network by creating and updating an MST
control network. This network is updated to improve the signal quality of its connec-
tions. Experiments showed that BERODE explored the environments more efficiently
than robot teams that implement a fixed control network. BERODE maintained the net-
work fully connected for more time than the fixed networks. In future research we plan
to validate these encouraging results in real environments.
References
1. George A Kantor, Sanjiv Singh, and R. Peterson. Distributed search and rescue with robot
and sensor teams. In The 4th Int’l Conf. on Field and Service Robotics, July 2003.
2. MaxStream. Indoor Path Loss: Application Note. MaxStream, 2003.
3. O. Michel. Webots: Professional Mobile Robot Simulation. Journal of Advanced Robotics
Systems, 1(1):39–42, 2004.
4. Matthew Powers and Tucker Balch. Value-based communication preservation for mobile
robots. In International Conference on Robotics and Automation, 2004.
5. T. S. Rappaport. Wireless Communication: Principles and Practice. Prentice Hall, 2nd
edition, 2001.
6. R. Simmons, W. Burgard, D. Fox, and S. Thrun. Coordination for multi-robot exploration
and mapping. In Proc. of the Nat’l Conf. on Artificial Intelligence, pages 852–858, 2000.
7. B.J. Thibodeau, A.H. Fagg, and B.N. Levine. Signal strength coordination for cooperative
mapping. Technical Report 04-64, University of Massachusetts Amherst, July 2004.
8. S. Thrun. Robotic Mapping: A Survey. In G. Lakemeyer and B. Nebel, editors, Exploring
Artificial Intelligence in the New Millenium, pages 1–35. Morgan Kaufmann, 2002.
9. P. Ulam and R. Arkin. When good communication go bad: communications recovery for
multi-robot teams. In Proc. of the Int’l. Conf. on Robotics and Automation, pages 3727–
3734, 2004.
10. Jose Vazquez. The BERODE architecture. PhD thesis, University of Edinburgh, 2006.
11. Jose Vazquez and Chris Malcolm. Fusion of triangulated sonar plus infrared sensing for
localization and mapping. In Proc. of the 2nd Int’l IEEE Conf. on Int. Systems, June 2005.
12. Alan Wagner and Ronald Arkin. Multi-robot communication-sensitive reconnaissance. In
Proc. of the IEEE Int’l Conf. on Intelligent Robotics and Systems, pages 4674–4681, 2004.
13. Alan FT Winfield. Distributed sensing and data collection via broken ad hoc wireless net-
works. In Distributed Autonomous Robotic Systems, volume 4, pages 273–282, 2000.
53
