
ROBUST HUMAN SKIN DETECTION IN COMPLEX
ENVIRONMENTS
Ehsan Fazl Ersi, John Zelek
Dept. Of System Design Engineering, University of Waterloo, N2L 3G1 Waterloo, ON, Canada
Keywords: skin detection, image brightness levels, neighborhood information, local entropy thresholding.
Abstract: Skin detection has application in people retrieval, face detection/tracking, hand detection/tracking and more
recently on face recognition. However, most of the currently available methods are not robust enough for
dealing with some real-world conditions, such as illumination variation and background noises. This paper
describes a novel technique for skin detection that is capable of achieving high performance in complex
environments with real-world conditions. Three main contributions of our work are: (i) processing each
pixel in different brightness levels for handling the problem of illumination variation, (ii) proposing a fast
and simple method for incorporating the neighborhood information in processing each pixel, and (iii)
presenting a comparative study on thresholding the skin likelihood map, and employing a local entropy
technique for binarizing our skin likelihood map. Experiments on a set of real-world images and the
comparison with some state-of-the-art methods validate the robustness of our method.
1 INTRODUCTION
In recent years, skin detection has been considered
as an active research topic, due to its important role
in several applications such as human body part
detection and tracking, especially faces (Ming-
Hsuan, 2002) and hands (Xiaojin, 2000), human
motion analysis (Aggarwal, 1997), and more
recently face recognition
1
. Skin Pixels are usually
detected using the color information, because (i) it is
1
The identix company claimed that by incorporating skin
surface analysis, the accuracy of their facial
recognition system, Faceit, improved by at least 20-
25%. See: http://www.identix.com/trends/skin.html
computationally not expensive, (ii) it is invariant
against geometrical transformations (e.g., rotation,
scaling and shape changes), and (iii) it can provide a
reasonable degree of separability between skin and
non-skin classes.
However, color information suffers from
sensitivity to illumination variation and besides;
pixel-wise color processing does not provide enough
information for distinguishing between human skin
pixels and background object pixels with skin-like
colors. This problem can limit the application of
color information in skin detection systems which
are used in complex environments.
In this paper we propose an algorithm for
accurate detection of human skin, under real-world
conditions such as illumination variation and skin-
like background colors. There are three main
contributions of our skin detection method. We will
introduce each of these ideas briefly below and then
describe them in details in the subsequent sections.
Processing each pixel in different brightness
levels is the first contribution; thus, handling the
problem of illumination variation. Each brightness
level is generated by increasing or decreasing the
color intensities of the original image. Once the
brightness levels are generated, the skin likelihood
27
Fazl Ersi E. and Zelek J. (2006).
ROBUST HUMAN SKIN DETECTION IN COMPLEX ENVIRONMENTS.
In Proceedings of the First International Conference on Computer Vision Theory and Applications, pages 27-34
DOI: 10.5220/0001376300270034
Copyright
c
SciTePress

of each pixel is computed by summing the skin
probability
2
of the colors of that pixel in different
brightness levels.
The second contribution is a simple and very fast
method for incorporating the neighborhood
information in processing each pixel. We increase
the skin likelihood of each pixel by the average of
the likelihood of its direct neighbors. Therefore, the
likelihood of a pixel with skin-like neighbors will be
increased much more than the likelihood of a pixel
with non-skin-like neighbors, although, the skin
likelihood of both pixels might be the same. This
helps to ignore the small skin like background
objects and disregard the small holes in skin regions.
The third major contribution is an evaluation and
comparison of the state-of-the-art thresholding
methods for binarizing the skin likelihood map.
Most of the recently proposed methods for skin
detection have used either a constant threshold or
some simple histogram-based adaptive thresholding
strategy for binarizing their skin likelihood map.
However, experimentally we show that the selection
of different thresholding strategies can significantly
affect the performance of a skin detection method.
Using the results of our comparative study, we
selected the local entropy thresholding method,
which is described in details in sub-section 5.2.
Our skin detection system has been trained and
tested on the db-skin dataset
3
which contains 102
real-world images with changing lighting conditions
and/or complex backgrounds (surfaces and objects
with skin-like colors). Our method achieved an
accuracy rate of 92.1% for a false positive rate of
17.2%, which was superior to the results of other
evaluated state-of-the-art methods.
2
The probability distributions in skin and non-skin classes
are obtained from the color histograms of a set of
representative images in RGB color space, with skin
and non-skin pixels labeled manually.
3
http://skin.li2.uchile.cl/db1
The remainder of the paper has been organized
as follow: Section 2 presents a brief overview on the
existing skin detection algorithms; sections 3, 4 and
5 describe different parts of our proposed skin
detection method; our experimental results and
comparison with other algorithms are illustrated in
section 6; and finally, in section 7 some conclusions
are given.
2 LITERATURE REVIEW
Based on Martinkauppi’s comparative study
(Martinkauppi, 2003), the currently available skin
detection strategies can be divided into two groups:
(i) algorithms which classify a pixel as skin color, if
its color is inside some defined region in color space
(Dai, 2002) (
Hsu, 2002); and (ii) algorithms which
classify a pixel as skin color, if its color has a higher
than a selected threshold probability. The methods in
the second group can be non-parametric like
histograms (Jones, 2002), semi-parametric like self
organizing maps (Piirainen, 2000) or neural
networks (Son, 2001), or parametric assuming a
certain distribution, like Gaussian or Gaussian
mixtures (Comaniciu, 2000).
The solutions proposed by these approaches for
handling the real-world conditions, especially
illumination variation, are limited to three: (i) color
correctness (e.g., (
Hsu, 2002)), (ii) illumination
component dropping (e.g., (Stern, 2002)), and (iii)
using neighborhood information (e.g., (Ruiz-del-
Solar, 2004)). However, color correctness and
illumination component dropping have been shown
to be not effective in all situations. Funt et al. (Funt,
1998) have shown that the current color correction
methods do not necessarily provide better results.
Also, it has been shown by Jayaram et al. (Jayaram,
2004) that in most situations, the skin detection
performance is significantly better with the presence
of an illumination component. Using neighborhood
information and region growing, as a more robust
solution, improves the performance of pixel-wise
approaches in complex environments. However,
they can not segment isolated skin regions which are
present in bad lighting conditions.
3 PROBABILITY DISTRIBUTION
OF SKIN COLORS
The skin and non-skin color models used in our
method are built from a set of real-world images in
VISAPP 2006 - IMAGE UNDERSTANDING
28

RGB color space, using a histogram learning
technique. We used two 32
3
bin histograms to model
skin and non-skin colors. Given skin and non-skin
histograms, we can compute the probability that a
given color rgb belongs to the skin and non-skin
classes:
ns
T
rgbn
skinrgbP
T
rgbs
skinrgbp
][
)|(,
][
)|( =¬=
(1)
where s[rgb] is the pixel count contained in bin rgb of the
skin histogram, n[rgb] is the pixel count contained in bin
rgb of the non-skin histogram, and T
s
and T
n
are the total
counts contained in the skin and non-skin histograms
respectively. Having
)|( skinrgbp
and
)|( skinrgbp
¬
,
we calculate
)|( rgbskinp
for each color rgb using Bayes
rule:
)()|()()|(
)()|(
)|(
skinpskinrgbpskinpskinrgbp
skinpskinrgbp
rgbskinp
¬¬+
=
(2)
)|( rgbskinp
indicates the probability of observing skin,
given a color rgb. The prior probabilities
)(skinp
and
)( skinp ¬
are estimated from the overall number of skin
and non-skin samples in the training sets
(Jones, 2002).
4 GENERATING THE SKIN
LIKELIHOOD MAP
The skin likelihood map is a gray-scale image whose
gray values represents the likelihood of the pixel
belonging to the skin class. In this section we
describe our technique for generating the skin
likelihood map.
4.1 Processing Different Brightness
Levels for Handling Illumination
Variation
In our system, we handle the problem of
illumination variation by generating a set of different
brightness levels of the image, and assigning skin
likelihood to each pixel by processing its colors in
different brightness levels. Each brightness level can
be generated by raising the color component
intensities to the power of γ, where γ is:
0
0
)1(1
1
≤
>
⎩
⎨
⎧
+
−
=
β
β
β
β
γ
(3)
The modified image is darker if β is between 0 and
1, and is brighter if β is between -1 and 0.
Once the brightness levels are computed, the skin
likelihood of each pixel is obtained by performing
the following equation,
∑
=
n
n
yx
rgbskinpyxsl )|(),(
,
(4)
where
n
yx
rgb
,
is the color of pixel (x,y) in n
th
brightness level.
The number of required brightness levels can be
automatically determined for each image by
analyzing its color histogram. However, for the sake
of simplicity and fast performance, we only process
two brightness levels besides the original image: (i)
a darker level with β=-0.5 and (ii) a brighter level
with β=+0.5. (see Figure1.a)
4.2 Incorporating Neighborhood
Information
Besides the color information, which exhibits a
reasonable degree of separability between skin and
non-skin classes, there is another source of
information that can be used in skin detection: skin
regions have low texture and a homogeneous local
color distribution. There have been some reports in
the literature that incorporate this property in their
detection process. However, most of them were
either computationally expensive or applicable to
only some particular situations (Alibiol, 2001)
(Martinkauppi, 2002).
In this paper, we employ a very simple and fast
technique for considering the neighborhood
information in classifying a pixel into skin or non-
skin classes. Assuming a wxw window centered at a
given pixel (x,y), the skin likelihood of pixel (x,y) is
increased using the following equation:
⎣⎦
⎣⎦
⎣⎦
⎣⎦
∑∑
−=−=
+++=
2/
2/
2/
2/
2
*
),(
1
),(),(
w
wi
w
wj
jyixsl
w
yxslyxsl
(5)
w can be any odd number between 3 and min(W,H),
where W and H are the width and the heights of the
image, respectively.
Although equation 5 is nothing but a set of
addition and a division operations, for w>5 its
computational cost can be considerable. Therefore
we employ an intermediate representation for sl,
called the integral image (Viola, 2001), which
provides a very fast scheme for computing sl*.
ROBUST HUMAN SKIN DETECTION IN COMPLEX ENVIRONMENTS
29
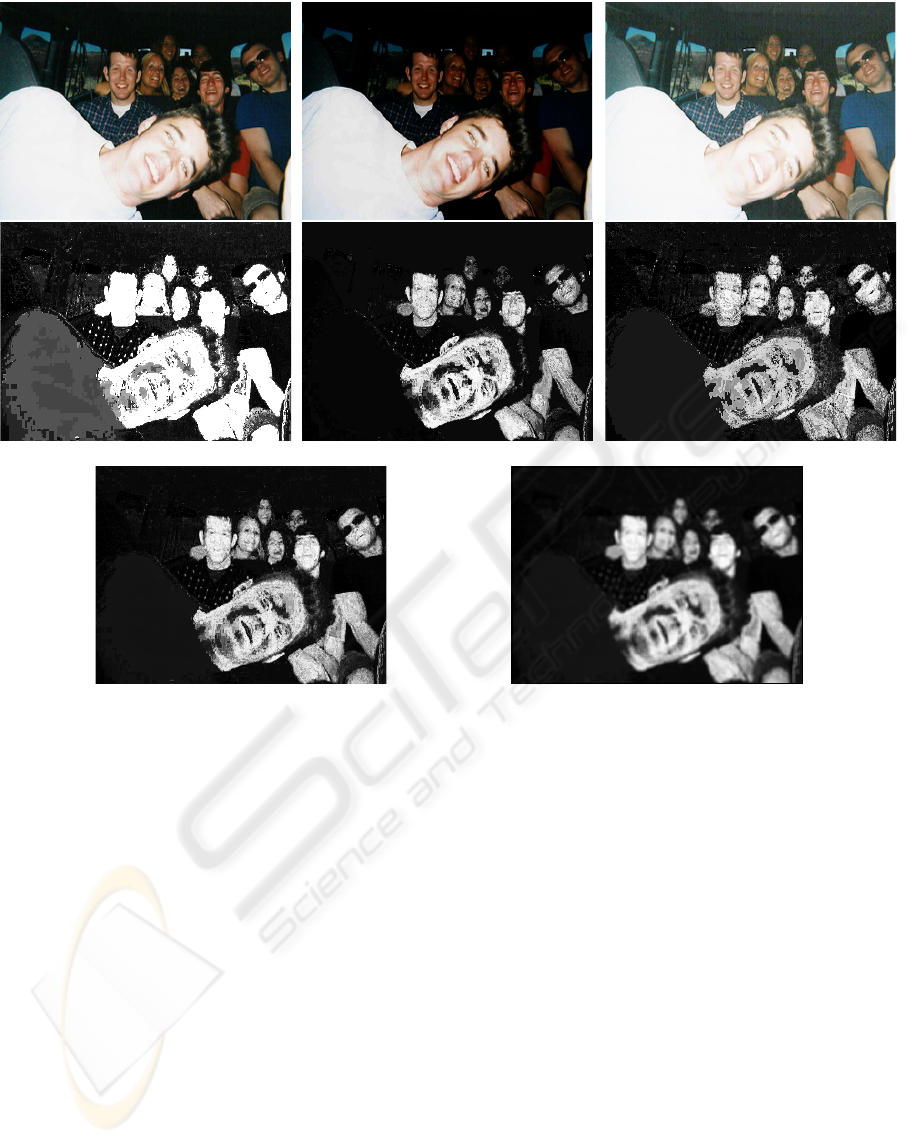
(a)
(b) (c)
Figure1: (a) Shows three brightness levels of a sample image, as well as the skin probability of the color of each pixel in
different brightness levels, for β=0, β=-0.5, and β=+0.5, from left to right. (b) Shows the skin likelihood, sl, obtained by
using Eq.4, and (c) shows sl*, our final skin likelihood map. As can be seen, sl*, appears qualitatively more accurate than sl
and any of the skin probability maps generated in different brightness levels.
The integral image at location (x,y) contains the
sum of the pixels above and to the left of (x,y).
Using the integral image any rectangular sum can be
computed in four array references with four simple
addition and subtraction operations. (for details on
generating the integral image, see (Viola, 2001)).
Figure1.c shows sl* for the skin likelihood
(figure 1.b) of a sample image. As can be seen, the
likelihood of a pixel with skin-like neighbors will be
increased much more than the likelihood of a pixel
with non-skin-like neighbors, although the skin
likelihood of both pixels might be the same. This
helps to ignore the small skin like background
objects and disregard the small holes in skin regions.
After incorporating neighborhood information,
we scale the skin likelihood map to 256 gray levels,
after which, thresholding is applied.
5 THRESHOLDING THE SKIN
LIKELIHOOD MAP
5.1 Thresholding Strategies
In order to segment the skin regions from a skin
likelihood map, a thresholding process should be
used. Most of the currently available skin detection
strategies have not paid sufficient attention to the
thresholding process and simply select a fixed value,
obtained by analyzing the receiver operating
characteristic (ROC) curve. However, we believe
that different images of different people with
different skins cannot be binarized using a unique
fixed threshold value. In this section we compare
VISAPP 2006 - IMAGE UNDERSTANDING
30

several state-of-the-art thresholding methods, as well
as a number of constant thresholds, to examine if
applying an adaptive thresholding strategy can
improve the detection performance.
Five methods are used in the skin likelihood
thresholding for comparison: Otsu’s method (Otsu,
1979), Pal & Pal’s local entropy (LE), global
entropy (GE), and joint entropy (JE) methods (Pal
and Pal, 1989), and Jones’s constant thresholding
(Jones, 2002). The skin likelihood maps of 27
randomly selected images from the db-skin dataset
were used for the experiments. Table1 shows the
performance of the five adaptive thresholding
strategies as well as the performance of three fixed
threshold values. Also the performance of three
adaptive techniques as well as Jones fixed strategy
on a difficult sample image is illustrated in figure 2.
Table1: The performance of different thresholding
strategies.
Methods False Negative False Positive
Otsu 6.9% 20.7%
Pal & Pal (GE) 8.4% 17.6%
Pal & Pal (LE) 9.9% 16.0%
Pal & Pal (JE) 8.2% 18.8%
Jones: 128 9.9% 17.7%
Fixed: 110 7.0% 22.2%
Fixed: 150 17.0% 11.4%
Fixed: 200 20.1% 10.2%
Based on our experimental results, we selected
Pal & Pal’s local entropy technique for thresholding
our skin likelihood maps, due to its trade-off
between false positive and false negative rates.
5.2 Local Entropy Thresholding
Method
Entropy is the measure of the information content in
a probability distribution. To provide the probability
distribution needed for the entropy measures, a co-
occurrence matrix is generated from the input image.
It is a mapping of the pixel to pixel grey scale
transitions in the image between the neighboring
pixel to the right and the pixel below each pixel in
the image. From the co-occurrence matrix comes the
distribution of grey scale transitions. The candidate
threshold divides the co-occurrence matrix into four
regions representing within object, within
background, object to background, and background
to object class transitions (see figure2). Then, the
second-order local entropy is computed by using the
local entropies of backgrounds and objects:
),()()(
)2()2()2(
tHtHtH
CAlocal
+=
(6)
A
ji
t
i
t
j
A
ji
pp
,
00
,
log
2
1
∑∑
==
−=
C
ji
titj
C
ji
pp
,
255
1
255
1
,
log
2
1
∑∑
+=+=
−
In the above equation
)2(
A
H and
)2(
C
H are the local
entropies of background and objects, respectively.
The optimal threshold is found by maximizing the
)(
)2(
tH
local
. For more details about the algorithm see
(Pal and Pal, 1989).
0
t
255
A B
D C
Figure2: Quadrants of a co-occurance matrix. A and C are
background and object respectively
.
5.3 Post-processing
Once the thresholding process has been done, we
perform a simple region growing technique,
iteratively, in order to add those pixels which are (i)
very close to a skin region, and (ii) have skin
likelihoods just under the applied threshold. This
helps to cover the skin edges which might be
removed during the incorporation of neighborhood
information.
6 EXPERIMENTS
Our experiments have been done on the db-skin
dataset, which contains 102 images under real-world
conditions, obtained from Internet and from
digitized news videos.
The majority of the images are difficult to
segment, due to either bad lighting conditions or
complex backgrounds containing surface and objects
with skin like colors.
ROBUST HUMAN SKIN DETECTION IN COMPLEX ENVIRONMENTS
31

Original image Skin likelihood map
Jones performance Otsu performance
Local entropy performance Global entropy
Figure2: The performances of different thresholding strategies on a sample image with a great amount of skin-like
background colors.
The result of applying some state-of-the-art
algorithms on a set of 27 selected images from the
db-skin dataset are reported in (Ruiz-del-Solar,
2004, FGR) and (
Ruiz-Del-Solar, 2004, ICIP). The
evaluated methods were: Jones1, which corresponds
to the MoG classifier proposed in (Jones, 2002)
using skin color model and a fixed threshold;
Jones2, the same as Jones1 but with employing non-
skin color model as well; SkinDiff, which
corresponds to the skin detection method proposed
in (
Ruiz-Del-Solar, 2004, ICIP) (RGB, MoG, and
diffusion algorithm); and HSU, which corresponds
to the skin detection algorithm proposed in (
Hsu,
2002) but without the use of whitening
compensation.
In order to compare our results with the
evaluated methods, we randomly selected 27 images
for testing and the rest for training. Since we did not
know which images had been used by Solar et al.
(Ruiz-del-Solar, 2004, FGR) (
Ruiz-Del-Solar, 2004,
ICIP) in their experiments, we performed our
experiments three times and for each time with
different sets of training and testing images. Then
we averaged the results. Table2 shows the
performance of or skin detection method, in
comparison with four previously evaluated methods.
VISAPP 2006 - IMAGE UNDERSTANDING
32

Table2:
The performance of our skin detection algorithm
in comparison with four state-of-the-art methods at a false
positive rate of ~0.17. Our results are the average of three
performances in different sets of randomly selected
images.
Methods Detection rate False positive
HSU 73.0% 17%
Jones1 85.0% 17%
Jones2 86.5% 17%
SkinDiff 88.1% 17%
Our method 92.1% 17.2%
Even though a considerable amount of
processing is employed for implementing our
method, a reasonable high processing speed is
achieved. It is worth to mention that the cost of
processing different brightness levels implemented
by LUT (look-up table), or incorporating
neighborhood information implemented using
integral image representation, was even less than the
transformation of the RGB color space to some other
color spaces like CIELAB or HIS, which have been
used by various researchers. However, the cost of
employing an adaptive thresholding strategy,
especially the entropic ones, is remarkable. The
computational time of our method for processing a
320x240 image is approximately 1.1s on a 3.06 GHz
CPU. However, this time is decreased to 0.28s by
employing a fixed value threshold.
7 CONCLUSION AND FUTURE
WORK
In this paper a novel skin detection algorithm was
proposed for handling the real-world situations, such
as bad lighting conditions or skin-like background
colors. Three contributions of our work are: (i)
processing each pixel in different brightness levels
for handling the problem of illumination variation;
(ii) presenting a fast and simple method for
incorporating the neighborhood information in
processing each pixel; and (iii) presenting a
comparative study on thresholding the skin
likelihood map, and employing local entropy
technique for binarizing our skin likelihood map.
The details of our method are described and the
detection performance is compared with some state-
of-the-art methods using a set of real-world images,
obtaining better results.
One of the directions that we are considering for
future work is to incorporate texture and shape into
our skin detection method. Furthermore, we intend
to apply our skin detection strategy to additional
applications such as nudity detection and adult
image filtering.
ACKNOWLEDGMENTS
The authors would like to acknowledge the
Communication and Information Technology
Ontario (CITO) for partially supporting this work.
REFERENCES
Aggarwal, J.K.; Cai, Q., 1997. Human motion analysis: a
review. In Nonrigid and Articulated Motion Workshop
1997, IEEE Proceedings.
Alibiol, A. and Torres, L., 2001. Unsupervised color
image segmentation algorithm for face detection
applications. In Proc. 3rd IEEE International
Conference on Image Processing.
Comaniciu, D. and Ramesh, V., 2000. Robust detection
and tracking of human faces with an active camera. In
Proc. 3rd IEEE International Workshop on Visual
Surveillance.
Dai, Y. and Nakano, Y., 2002. Face-texture model-based
on SGLD and its application in face detection in a
color scene. Pattern Recognition, 29(6).
Funt, B. and Barnard, K., 1998. Is machine color
constancy good enough?. In Proc. 5th European
Conference on Computer Vision
Hsu, R. L., Abdel-Mottaleb, M. and Jain AK., A. K.,2002.
Face detection in color images. IEEE Transactions on
Pattern Analysis and Machine Intelligence, 24(5).
Jayaram, S.; Schmugge, S.; Shin, M.C.; Tsap, L.V., 2004.
Effect of colorspace transformation, the illuminance
component, and color modeling on skin detection.
In CVPR 2004, Proceedings of the 2004 IEEE
Computer Society Conference Volume 2.
Jones, M.J. and Rehg, J.M., 2002. Statistical color models
with application to skin detection. International
Journal of Computer Vision, 46(1).
Pal, N. and Pal, S., 1989. Entropic thresholding. In Sygnal
Process.
Piirainen, T., Silv´en, O. and Tuulos, V., 2000. Layered
selforganizing maps based video content
classification. Workshop on Real-time Image
Sequence Analysis.
Martinkauppi, B., 2002. Face color under varying
illumination – analysis and applications. Ph.D. thesis,
University of Oulu.
Martinkauppi, B.; Soriano, M.; Pietikainen, M., 2003.
Detection of skin color under changing illumination: a
comparative study.
In Image Analysis and Processing, 2003.Proceedings.
12th International Conference.
Ming-Hsuan, Y.; Kriegman, D.J.; Ahuja, N., 2002.
Detecting faces in images: a survey.
ROBUST HUMAN SKIN DETECTION IN COMPLEX ENVIRONMENTS
33

In Pattern Analysis and Machine Intelligence, IEEE
Transactions, vol 24.
Otsu, N., 1979. A threshold selection method from gray-
level histograms. In IEEE Trans. Syst. Man Cybern.
Ruiz-Del-Solar, J. and Verschae, R., 2004. Robust skin
segmentation using neighborhood information. In.
Proc.IEEE International Conference on Image
Processing (ICIP).
Ruiz-del-Solar, J. and Verschae, R., 2004. Skin detection
using neighborhood information.
In Automatic Face and Gesture Recognition, 2004
(FGR). Proceedings. Sixth IEEE International
Conference.
Son, L.M., Chai, D. and Bouzerdoum, A., 2001. A
universal and robust human skin color model using
neural networks. Proc. IJCNN ’01 International Joint
Conference on Neural Networks, vol. 4.
Stern, H; Efros, B., 2002. Adaptive color space switching
for face tracking in multi-colored lighting
environments. In Automatic Face and Gesture
Recognition, 2002. Proceedings. Fifth IEEE
International Conference.
Viola, P. and Jones, M., 2001. Rapid object detection
using a boosted cascade of simple features. In Proc.
IEEE CVPR.
Xiaojin, Z.; Jie Y.; Waibel, A., 2000. Segmenting hands of
arbitrary color. In Automatic Face and Gesture
Recognition Proceedings. Fourth IEEE International
Conference.
VISAPP 2006 - IMAGE UNDERSTANDING
34
