
SPEAKER’S GENDER IDENTIFICATION FOR HUMAN-ROBOT
INTERACTION
Kyung-Sook Bae, Keun-Chang Kwak, Soo-Young Chi
Intelligent Robot Research Division, Electronics and Telecommunications Research Institute(ETRI),
161 Gajeong-Dong, Yuseong-Gu, Daejeon, Korea
Keywords: Gender Identification, GMM, URC.
Abstract: This paper is concerned with a text-independent Speaker’s gender Identification (GI) for Human-Robot
Interaction (HRI). For this purpose, we perform speaker’s gender recognition based on Gaussian Mixture
Model (GMM) and use robot platform called WEVER, which is a Ubiquitous Robotic Companion (URC)
intelligent service robot developed at Intelligent Robot Research Division in Electronics and
Telecommunication Research Institute (ETRI). Furthermore, we communicate with intelligent service
robots through a Korean-based spontaneous speech recognition and text-independent speaker’s gender
identification to provide a suitable service such as selection of preferable TV channel or music for the
identified speaker’s gender. The experimental results obtained for ETRI speaker database reveal that the
approach presented in this paper yields a good identification (94.9%) performance within 3 meter.
1 INTRODUCTION
Speaker Identification has many applications and is
a topic of great interest in the speech research
community. Speaker’s Gender Identification (GI)
can be thought of as a subset of speaker
identification and also can be contributed to increase
performance of Speaker Identification as a
preprocessing. In the past, GI has been investigated
for clean speech by Wu and Childers (Wu, 1991).
Parris and Carey studied GI for different languages
using telephone speech data. In their system Paris
and Carey trained an GI system using speakers of
British English and tested their system using
speakers of British English, US English, and 10
other languages. Slomka and Sridharan proposed
text-independent GI systems capable of being
optimized for multiple adverse conditions, including
various coders, and reverberation levels (Slomka,
1997).
Recently, there has been a renewal of interest in
Human-Robot Interaction (HRI) for intelligent
robots. Among HRI components, specifically the
concern with speech-based HRI such as speech
recognition, sound source separation, and speaker
recognition has been growing. In this paper, we
present text-independent GI to develop HRI
components for Ubiquitous Robotic Companion
(URC) intelligent service robots, which exploit
strong Information Technology (IT) infrastructure
such as high-speed internet.
Here the URC means
that it will provide the necessary services at any time
and place to meet the user’s requirements. Thus, it
combines the network function with the current
concept of a robot in order to enhance mobility and
human interface. For this purpose, we perform
gender recognition based on Gaussian Mixture
Model (GMM) (Reynolds, 1995) through a
microphone equipped with WEVER robot developed
by ETRI. Furthermore, we communicate with
intelligent service robots through spontaneous
speech recognition and text-independent speaker’s
gender recognition to provide a suitable service for
the identified speaker’s gender. The experimental
results obtained for ETRI speaker database reveal
that the presented approach yields a good
identification performance at a short or long-
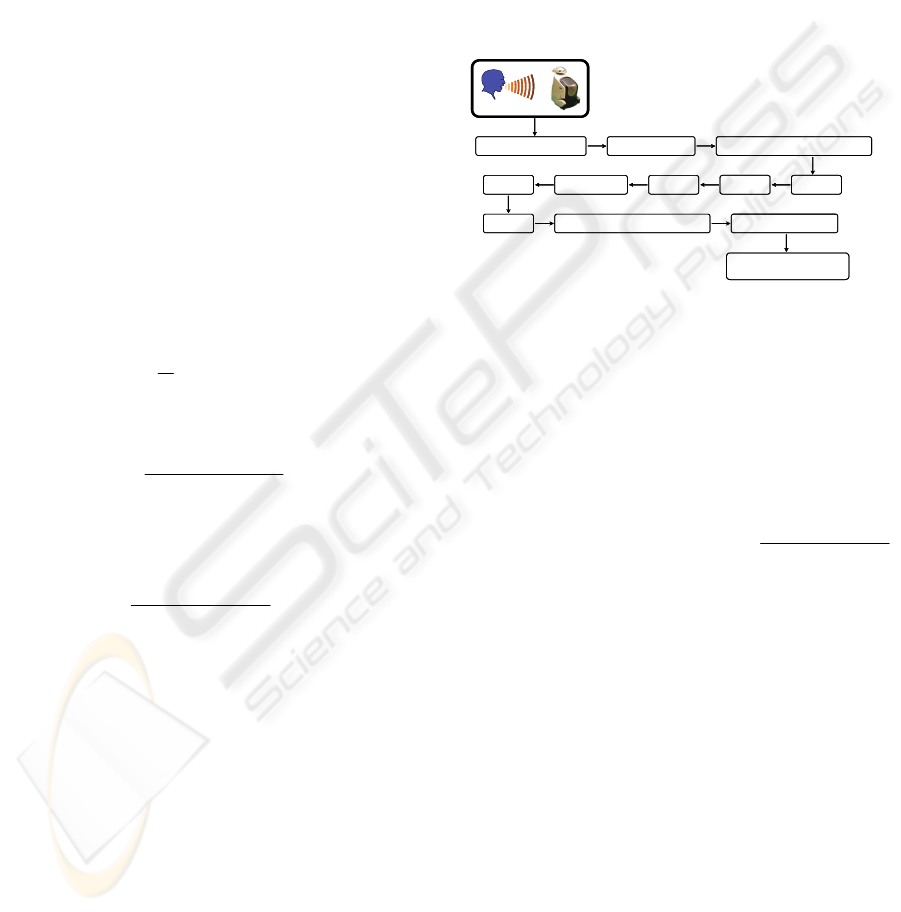
distance (3m-5m). Proposed GI system is shown in
Figure 1.
339
Bae K., Kwak K. and Chi S. (2006).
SPEAKER’S GENDER IDENTIFICATION FOR HUMAN-ROBOT INTERACTION.
In Proceedings of the International Conference on Signal Processing and Multimedia Applications, pages 339-342
DOI: 10.5220/0001569103390342
Copyright
c
SciTePress

Figure 1: Gender Identification System.
This paper is organized in the following manner.
Section 2 introduces the background and concept of
URC intelligent service robots. Section 3 describes
GMM method for text-independent GI. The well-
known approaches for identification are explained in
Section 4. Section 5 reports on comprehensive
experiment results for GI under robot environments.
Furthermore, we shall a scenario that the robot offers
a service according to the speaker’s sex by text-
independent GI. Finally concluding comments are
concluded in Section 6.
2 URC INTELLIGENT SERIVCE
ROBOTS
In this Section, we briefly introduce URC intelligent
service robots. The network-based intelligent service
robot refers to a URC that provides necessary
services anytime and anywhere. Recently Ministry
of Information and Communication (MIC) in Korea
has launched IT-based service robot project based on
the concept of URC. Thus, the URC will be
developed with a priority placed on human-focused
functions. Consumers will be able to enjoy various
services of the robot at lower costs since the URC
will operate by adding network functions to the
existing robots. The combination of a robot and IT
infrastructure will result in human-oriented
interfaces and technologies that enhance our living
standards. Figure 2 shows a schematic diagram of
distributed control middleware for URC to
communicate with URC servers in order to use
various home services and software. These robots
are very appealing in that they could quite possibly
enable Korea to secure competitive superiority over
other countries in the robot development area.
Figure 2: Schematic diagram for a middleware of URC
intelligent service robots.
3 GAUSSAIN MIXTURE MODEL
In what follows, we describe the well-known GMM
frequently used for performing text-independent GI
to represent gender model under robot environments.
Here, the distribution of feature vectors extracted
from individual speech is performed by a Gaussian
mixture density. For a D-dimensional feature vector
denoted as x, the mixture density for gender is
defined as
∑
=
=
M
i
iis
xbwxP
1
)()|(
λ
(1)
where
i
w is mixture weights and
i
b is Gaussian
mixture. The density is a weighted linear
combination of M Gaussian mixture
i
b
parameterized by a mean vector
i
μ and covariance
matrix
i
∑
. The Gaussian mixture is defined as the
following equation
2/1
i
2/D
i
)2(
1
)x(b
∑π
=
⎟
⎠
⎞
⎜
⎝
⎛
μ−∑μ−−×
−
)x()()x(
2
1
exp
i
1
i
T
i
(2)
The mixture weights
i
w satisfy the
SIGMAP 2006 - INTERNATIONAL CONFERENCE ON SIGNAL PROCESSING AND MULTIMEDIA
APPLICATIONS
340
constraint
1w
M
1i
i
=
∑
=
. Thus, the parameters of
gender model are denoted as
{
}
.M,,1i,,,w
iii
s
…=∑μ=λ For simplicity,
diagonal covariance matrices are used to construct
GMM, because diagonal matrix are more
computationally efficient than full covariance matrix
for training (Reynolds, 1995). Given training speech
from a speaker, the speaker’s gender model is
trained by estimating the parameters of the GMM.
The well-known method is maximum likelihood
estimation. For a sequence of T training vector
{}
T21
x,,x,xX
…
= , the GMM likelihood can be
expressed as
∏
=
λ=λ
T
1t
sts
)|x(p)|X(p
(3)
The maximum likelihood parameter estimation is
obtained by using the Expectation-Maximization
(EM) algorithm as follows
∑
=
λ=
T
1t
sti
),x|i(p
T
1
w
ˆ
(4)
∑
∑
=
=
λ
λ
=μ
T
1t
st
T
1t
tst
i
),x|i(p
x),x|i(p
ˆ
(5)
2
i
T
1t
st
2
t
T
1t
st
i
ˆ
),x|i(p
x),x|i(p
ˆ
μ−
λ
λ
=∑
∑
∑
=
=
(6)
where
iii
ˆ
,
ˆ
,w
ˆ
∑μ
are the updated parameters
(mixture weight, mean, and variance) for i’th
Gaussian mixture. The advantages of GMM as the
likelihood function are that it is computationally
inexpensive. It is also based on a well-understood
statistical model. For text-independent tasks, GMM
is insensitive the temporal aspects of the speech by
modeling only the underlying distribution of
acoustic observations from a speaker [Reynolds,
1995].
4 GENDER RECOGNITION
After detecting signal, we perform the feature
extraction as shown in Figure 3. This method is
comprised of six stages: pre-emphasis, frame
blocking, hamming widow to lessen distortion, Fast
Fourier Transform (FFT), triangular bandpass filter,
and cosine transform to get MFCC. The size of these
feature vectors is
8236and,8224,8212
×
×
×
,
respectively. For simplicity, we use 11 order Mel-
scale cepstrum parameters except for the first order.
FFTabslogresampleIFFT
Hamming windowing
real first 11 coefficients normalization
MFCC of length 11
take frameslow-pass filter
FFTabslogresampleIFFT
Hamming windowing
real first 11 coefficients normalization
MFCC of length 11
take frameslow-pass filter
Figure 3: Block diagram for feature extraction.
For GI, a group of speaker’s sexuality
},{ FemaleMaleS
=
is represented by GMM’s
parameters. The main goal is to find the speaker’s
gender model which has the maximum a posteriori
probability as the following equation (Reynolds,
1995).
)(
)()|(
maxarg)|(maxarg
ˆ
11
Xp
pXp
XpS
kk
Sk
k
Sk
λλ
λ
≤≤≤≤
==
(7)
where the second equation is based on Bayes’
rule. Assuming equally likely genders, p(X) is the
same for male model and female model, the
identification simplifies as follows
)|X(pmaxargS
ˆ
k
Sk1
λ=
≤≤
(8)
Using logarithms and the independence between
observations, the GI is computed as
)|x(plogmaxargS
ˆ
kt
T
1t
Sk1
λ=
∑
=
≤≤
(9)
SPEAKER’S GENDER IDENTIFICATION FOR HUMAN-ROBOT INTERACTION
341
5 EXPERIMENTAL RESULTS
In this section, we use ETRI speaker database to
evaluate the identification performance of the
presented GI system. Figure 4 shows WEVER,
which is URC intelligent service robot developed by
ETRI. The database is constructed by audio
recording of 80 speakers (20 females and 60 males).
The data set consists of 30 sentences for each
speaker. We divide the speech data into training (30
sentences
× 20 people (10 females and 10 males)
×
3
distances (1,2,3m)) and test data sets (30
sentences
× 60 people(10 females and 50 males)
×
5
distances (1,2,3,4,5m)). The recording was done in
an office environment. The audio is stored as a
mono, 16bit, 16KHz, Wav file. We performed text-
independent GI under robot environments. Figure 5
shows the GI performance of GMM obtained from
the variation of several mixture size and distances.
Figure 4: Robot platform WEVER.
0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5
60
65
70
75
80
85
90
95
100
distance (meter)
recognition rates
64 GMM
128 GMM
256 GMM
Figure 5: Performance obtained by GMM.
As shown in Figure 6, the experimental results
within 3 meter showed a good identification
performance (94.9%). Furthermore, the results
obtained from the variation of GMM size showed a
similar performance in this experiment.
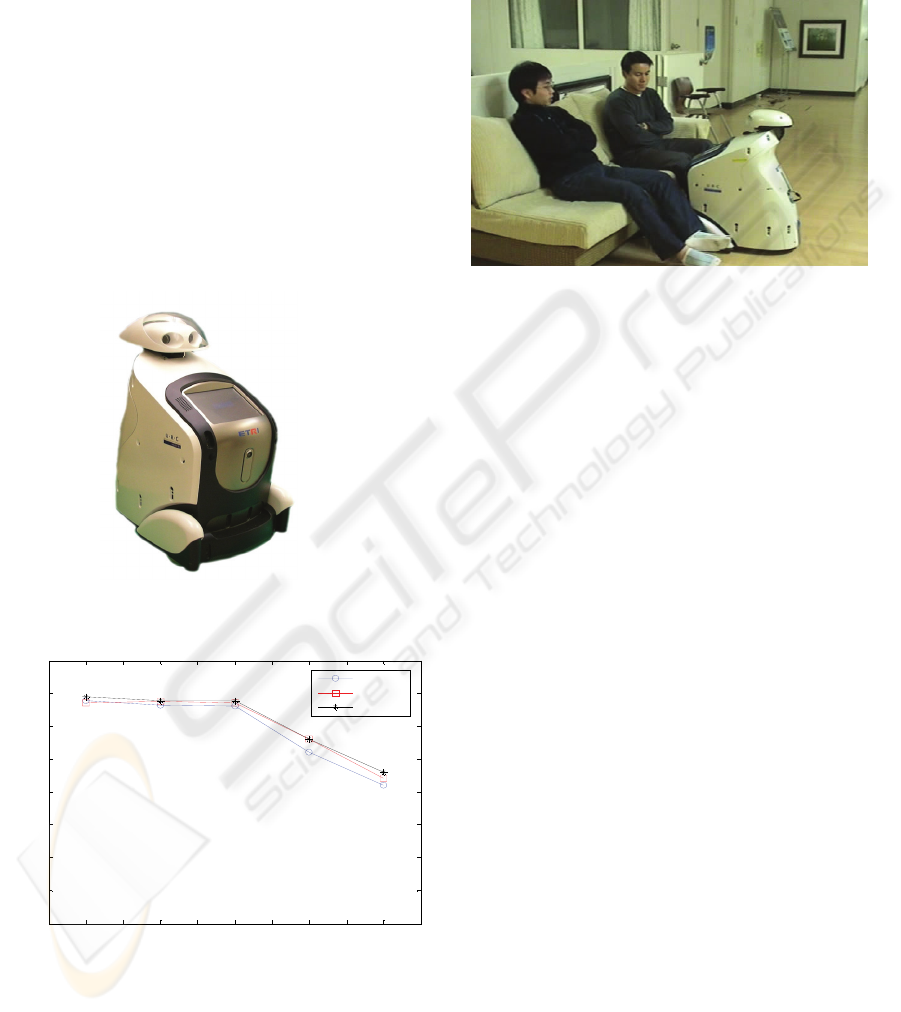
In what follows, we shall show a scenario for
combining the text-independent GI presented in this
paper and spontaneous speech recognition. Fig. 10
shows a scenario for providing a suitable service
such as selection of preferable TV channel.
Figure 6: Scenario through combination text-independent
GI and spontaneous speech recognition.
6 CONCLUSION
We have developed the text-independent GI as the
speech-based HRI components for URC intelligent
service robots, which exploit strong IT infrastructure.
It is concluded that the approach presented in this
paper showed usefulness and effectiveness for GI
under robot environments. A further direction of this
study will be to fuse feature information obtained
through several microphones. Furthermore, we shall
perform further research on multi-modal user
identification and verification using audio and vision
information.
REFERENCES
D. A. Reynolds and R. C. Rose, “Robust text-independent
speaker identification using Gaussian mixture speaker
models,” IEEE Trans. on Speech and Audio
Processing, vol. 3, no. 1, pp. 72–83. 1995.
Slomka, S and Sridharan, S, “Automatic gender
identification optimised for language independence,”
TENCON ‘97, vol. 1, pp. 145–148, 1997.
J. P. Campbell, “Speaker recognition: a tutorial,”
Proceedings of IEEE, vol. 85, no. 9, pp. 1437-1462,
1997.
K. Wu and D.G. Childers, “Gender Recognition from
Speech. Part I: Coarse Analysis”, J. Acoust. Soc. Am.,
Vol. 90, No. 4, pp1828-1840, 1991.
SIGMAP 2006 - INTERNATIONAL CONFERENCE ON SIGNAL PROCESSING AND MULTIMEDIA
APPLICATIONS
342
