
KNOWLEDGE-BASED MODELING AND NATURAL COMPUTING
FOR COORDINATION IN PERVASIVE ENVIRONMENTS
Michael Cebulla
Technische Universit
¨
at Berlin, Institut f
¨
ur Softwaretechnik und Theoretische Informatik,
Franklinstraße 28/29, D-10587 Berlin,
Keywords:
Knowledge Engineering, Coordination in Multi-Agent Systems, Systems Engineering Methodologies.
Abstract:
In this paper we start with the assumption that coordination in complex systems can be understood in terms of
presence and location of information. We propose a modeling framework which supports an integrated view
of these two aspects of coordination (which we call knowledge diffusion). For this sake we employ methods
from ontological modeling, modal logics, fuzzy logic and membrane computing. We demonstrate how these
techniques can be combined in order to support the reasoning about knowledge and very abstract behavioral
descriptions. As an example we discuss the notion of distributed action and show how it can be treated in
our framework. Finally we exploit the special features of our architecture in order to integrate bio-inspired
coordination mechanisms which rely on the exchange of molecules (i.e. uninterpreted messages).
1 INTRODUCTION
Enabled by the recent advances on the fields of hard-
ware design, wireless communication and (last not
least) the Internet the distribution of mobile devices
in society will dramatically increase during the forth-
coming decade. In these pervasive environments es-
pecially the requirement of context-awareness is crit-
ical: mobile devices have to be aware of information
and services which are present in the current situation
and cooperate with them when desirable. On the other
hand they are also required to provide meaningful be-
havior when these services cannot be found. Conse-
quently pervasive systems have to possess novel inter-
action capabilities in order to be aware of the current
situation and to initiate adequate behaviors. These ca-
pabilities are key features for the success of emerg-
ing pervasive technologies and are discussed under
the topic autonomous computing (Kephart and Chess,
2003).
In this presentation we focus on the systems’ abil-
ity to initiate cooperations with other systems and to
represent knowledge about themselves and their sit-
uation. As we will see a special focus lies on is-
sues related to the locality of knowledge and on the
migration of information. We treat the first aspect
of knowledge representation by relying on ontologi-
cal modeling and knowledge bases thus enabling the
high-level modeling of complex systems (as already
proposed by (Pepper et al., 2002)). Regarding the
second aspect related to the migration of knowledge
we rely on membrane computing (P
˘
aun, 2000). This
model which was taken from biology is highly ap-
propriate to model systems which have to interact ex-
tensively with their environment. Systems which are
modeled by membranes have porous system borders
where molecules can intrude and exit. As we will see
these molecules can be used to represent information
which diffuses through the system.
For the syntactic representation of knowledge we
propose to use ontologies (i.e. description logics
(Baader et al., 2003)) as a light-weight formalism
which provides support for automated reasoning.
From our point of view such a formalism meets some
requirements which may be unfamiliar from a tradi-
tional viewpoint concerning system modeling.
Intelligibility. Since it is very close to natural lan-
guage and thus supports the direct usage of
domain-specific terminology, ontological modeling
provides an instrument for a seamless knowledge
management.
Uncertainty and Incompleteness. Systems in ad-
verse environments are subject to unexpected influ-
ences (uncertainty) and are characterized by a high
complexity which makes an exact description im-
possible or inefficient. As we will see the issues of
99
Cebulla M. (2006).
KNOWLEDGE-BASED MODELING AND NATURAL COMPUTING FOR COORDINATION IN PERVASIVE ENVIRONMENTS.
In Proceedings of the Eighth Inter national Conference on Enterprise Information Systems - AIDSS, pages 99-106
DOI: 10.5220/0002454500990106
Copyright
c
SciTePress

vagueness and uncertainty are treated by the intro-
duction of fuzzy logics (Klir and Yuan, 1995) and
modal logics (Wooldridge, 1992) into terminologi-
cal reasoning.
Highly Reactive Behavior. Since the semantics of
membrane computing is based on multisets it is
well-suited for the treatment of highly reactive be-
havior since e.g. inadequate assumptions concern-
ing sequentiality are avoided.
Efficient Automated Reasoning. We claim that an
enhanced intelligibility and support for incomplete
specifications have to go hand in hand with well-
defined semantics and efficient decision proce-
dures. A standard way of reasoning is provided
procedures which are based on tableau algorithms
(Baader et al., 2003) which support a smooth inte-
gration of different aspects of knowledge. A key
issue in this context is the adequate treatment of
implicit information, e.g. with respect to structural
similarities of different entities. Such a treatment is
possible by exploiting the concept of subsumption
as defined in the context of description logics.
This paper is organized as follows: first we give
an outline of the general architecture (cf. Sec-
tion 2). In this section we discuss the significance of
observation-based behavioral modeling (cf. Subsec-
tion 2.1) and briefly introduce the basic concepts from
membrane computing (cf. Subsection 2.2). Then we
briefly discuss the basic concepts of fuzzy descrip-
tion logics (cf. Subsection 2.3). Section 3–4 give an
overview about terminological reasoning concerning
exemplary system aspects (e.g. architecture and be-
havior). We then show how to treat abstract specifica-
tions of distributed actions in our framework (cf. Sec-
tion 5). Sections 4 and 5 can be considered as an
exemplary discussion of tableau-based reasoning in
the medium of membrane computing. In Section 6
we finally give an example for the integration of bio-
inspired coordination supported by our framework.
Throughout the paper we use examples from disas-
ter management because we feel that the challenges
related to context-awareness are very specific in these
area.
2 GENERAL ARCHITECTURE
As we already indicated we doubt that traditional in-
teraction mechanisms (like procedure calls or mes-
sage passing) are qualified to support context-aware
behavior in pervasive environments. For this reason
we employ methods from the field of natural com-
puting which are better suited to support the analysis
of knowledge diffusion. Since we refer to mechanisms
which were originally observed in biological or social
read/write
Environment
D
isponent
Sensor
In the near future I will
have to talk to a local
officer−in−charge (e.g. via GSM)
Probably the antenna−pole
will be flooded within three hours
Figure 1: Typical Coordination Problem.
environments we start with examples from so-called
socio-technical systems (e.g. coordination in disaster
management). In this section we discuss a motivating
example and develop the basic architecture.
2.1 Observation-based Modeling
We select disaster management as one of our target
domains because there in the typical case the situa-
tion is characterized by high environmental dynam-
ics, high need of information and frequent coordina-
tion problems. Obviously in this scenario (cf. Fig-
ure 1) the water-level is a highly important informa-
tion (since it is one of the main parameters of the
flooding). Thus it surely makes sense to observe this
parameter and keep track of its changes. This is com-
monly done by sensors (which are represented by an
unique sensor in our simplified architecture). Sensors
collect information which then can be sent to the parts
of the system where decisions are made on the basis
of this information (e.g. the disponent). So far an ini-
tial model. But the real situation is far more complex.
In fact the behavior of the flood (and thus the para-
meter water-level) cannot be considered as an isolated
phenomena which can be observed by an independent
observer. On the contrary the evolution of the situa-
tion (the flooding) directly affects the internals of sys-
temic communication and decision making. Thus the
rising of a flood has frequently severe consequences
for the infrastructure (e.g. telephone nets for conven-
tional or mobile communication). This dependency
may lead to complex and hidden interactions between
systemic aspects which seem to be unrelated at first
sight. For instance the rising of the flood interacts
with the disponent’s need to use mobile telecommuni-
cation in the near future when an antenna pole will not
be operable due to overflooding. Note that such hid-
den interactions between components are known as
complex interactions (Leveson, 1995; Perrow, 1984)
and are considered as major causes for losses and ac-
cidents.
Agents Knowledge and Behavior. We consider
our approach as an extension of the modeling of
multi-agent systems (cf. for example (Fagin et al.,
1996)). For reasoning about knowledge and behavior
ICEIS 2006 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
100

Officer−
in−Charge
Disponent
water−level.=0.7
Sensor
Environment
antenna−pole.intact
Figure 2: Scenario from Disaster Management (simplified).
we presuppose that each agent supports the following
interface.
interface Agent
know: X × T → bool
next: X × T → X
Such a signature is especially suited for the model-
ing of black box-behavior. While the function know
supports observations concerning the current state of
an agent the function next supports experiments con-
cerning the behavior of an agent. Note that these func-
tions have some coalgebraic flavour since the state
space X of an agent may not be known completely
(cf. (Rutten, 1996)). Thus these functions support the
reasoning about an agent’s state (his knowledge) and
his behavior without requiring information about his
internals.
While the agent-interface supports the observation
of agents their real behaviors are described with con-
cepts from membrane computing (cf. Subsection 2.2).
Consequently, each agent is considered to be enclosed
by a membrane. As we will see, due to this fact infor-
mation can diffuse through systems and agents bor-
ders according to diffusion rules. We use concepts
from multiset rewriting in order to describe the diffu-
sion of knowledge through complex systems.
In Figure 2 we show some relevant agents in an
highly simplified scenario of coordination described
by our example. We show how to model agents as
locations of information. We consider the knowledge
which is situated inside the membranes as private to
the agents while the information which is outside is
accessible to all agents which share a certain environ-
ment.
Discussion. We can make several observation us-
ing this example. Firstly we claim that problems
of this type can be modeled using the paradigm of
knowledge diffusion. An important notion in this con-
text concerns the location of information and question
whether this location is suitable for this information
or if it has to be moved to other locations. In addi-
tion we have to provide advanced coordination mech-
anisms which are highly robust in order to be able
to process for example the tight connection between
environment and communication. Consequently we
propose to use the paradigm of knowledge diffusion
not only for the analysis of coordination problems
but also as a platform for very robust coordination.
The related processes of knowledge diffusion are very
similar to processes of biological knowledge process-
ing (e.g. the usage of pheromones in insect popula-
tions, cf. (Krasnogor et al., 2005)).
Environment. Obviously in our approach the en-
vironment plays a prominent role. For illustration we
distinguish two characteristic scenarios.
Naive Scenario. In the naive scenario the environ-
ment takes an adversial role. It does not pro-
vide knowledge about the situation but disturbs the
agents’ actions deliberately. The relevant knowl-
edge is located exclusively in the agents. The
weakness of this model consist in the fact that this
knowledge does not suffice in complex and dy-
namic setting. Thus the agents have to specify in-
teractions on the basis of incomplete knowledge.
For example this will lead him to an inadequate se-
lection concerning the communication channel.
Intelligent Environment. In the second case the en-
vironment incorporates relevant situational knowl-
edge which can be used in order to enhance the
systems behavior. The agents possess only incom-
plete knowledge about the situation. Consequently
most of their actions have to be considered as inter-
actions with the environment. The agents initiate
only very abstract interactions while the environ-
ment is in charge to introduce the missing informa-
tion. We consider this interaction with assistance
by an intelligent environment as a typical case of
knowledge diffusion. In this scenario agents do not
address certain services but just give an expression
of their needs to the environment.
The naive scenario perfectly describes the tradi-
tional view on systems which are not context-aware.
In these systems the relevant knowledge is situated
in the agents while the environment is considered to
be adversial. In the case of intelligent environments
on the other hand each action of an agent has to be
considered as a joint action (also called distributed
action) which is performed in cooperation with the
environment.
2.2 Membrane Computing
More formally we represent knowledge as molecules
(or terms) which are contained in multisets. The dif-
fusion of knowledge can thus be described by multiset
rewriting. For example, the diffusion of information
in systems can described by simple rules:
[water-level.High] → [(need-to-act, out)]
In this notation we use the brackets [ and ] for the
specification of the membrane structure. In our ex-
KNOWLEDGE-BASED MODELING AND NATURAL COMPUTING FOR COORDINATION IN PERVASIVE
ENVIRONMENTS
101

ample the brackets delimit the multiset which repre-
sents the knowledge which is private to the sensor.
The resulting rule describes the distribution of infor-
mation through the system. We deliberately use inex-
act terms like need-to-act in order to demonstrate the
possibilities of high-level modeling. By the standard
action out we specify that this molecule has to exit
the sensor’s local state. Note that this molecule is not
expected to carry extensive semantic significance but
may only transmit the information that the system’s
current state is not optimal.
P-Systems. Following (P
˘
aun, 2000) we use the
concept of P systems which heavily relies on the
metaphor of a chemical solution (Berry and Boudol,
1992) for the representation of knowledge in a sys-
tem. As we already saw a solution contains molecules
which represent terms. As we will see these terms are
elements of a language which is describe by an on-
tology. More formally a P-System can be defined as
follows (slightly adapted from (P
˘
aun, 2000)):
Definition 1 (P-System) A P-system of
degree m is defined as a tuple Π=
O, µ, w
1
,...,w
m
,R
1
,...,R
m
, where O is an
ontology, µ is a membrane structure, w
1
,...,w
m
are multisets of strings from O (representing the
knowledge contained in regions 1, 2,...,m of
µ, R
1
,...,R
n
are sets of transformation rules
associated with the regions.
We chose this highly reactive semantic model as the
basis of our process description because we feel that
it is highly appropriate for the description of unex-
pected behavior. Especially, environmental changes
or unexpected contextual influences can be modeled
by introducing new molecules into the solution. In
addition no assumptions concerning artificial sequen-
tiality are imposed on the events contained in a mul-
tiset: in general case they can occur in every possible
order.
2.3 Fuzzy Description Logics
For the representation of terms which may be sub-
ject to semantic interpretation we use fuzzy descrip-
tion logics. Following (Straccia, 2001) we introduce
semantic uncertainty by introducing multi-valued se-
mantics into description logics. Consequently we
have to introduce fuzzy sets (Zadeh, 1965) instead
of the crisp sets used in the traditional semantics (cf.
(Baader et al., 2003)). For this sake we conceive the
model of the terminological knowledge which is con-
tained in a knowledge base as fuzzy set. When used
in assertional statements we can express the fact that
different instances (elements of ∆) may be models of
a concept to a certain degree.
Definition 2 (Fuzzy Interpretation) A fuzzy inter-
pretation is a pair I =(∆
I
, ·
I
), where ∆
I
is, as
for the crisp case, the domain whereas ·
I
is an inter-
pretation function mapping
1. individuals as for the crisp case, i.e. a
I
= b
I
, if
a = b;
2. a concept C into a membership function C
I
:
∆
I
→ [0, 1];
3. a role R into a membership function R
I
:∆
I
×
∆
I
→ [0, 1].
If C is a concept then C
I
will be interpreted as the
membership degree function of the fuzzy concept C
w.r.t. I. Thus if d ∈ ∆
I
is an object of the domain
∆
I
then C
I
(d) gives us the degree of being the ob-
ject d an element of the fuzzy concept C under the
interpretation I (Straccia, 2001).
In this article we make use of the usual operators
from description logics and silently introduce predi-
cates on fuzzy concrete domains (which are very sim-
ilar to linguistic variables and support the integra-
tion of linguistic hedges (Klir and Yuan, 1995)). We
also heavily rely on the concept of fuzzy subsumption
which we introduce by example. In addition we intro-
duce complex role-terms in Section 5. Unfortunately
we are not able to give an extensive treatment due to
space limitations.
Fuzzy Subsumption. Intuitively a concept is sub-
sumed by another concept (in the crisp case) when
every instance of the first concept is also an instance
of the second. In the fuzzy case, however, we are in-
terested in the degree to which the current situation
conforms to a certain concept. As an example we
consider a case from the domain of disaster manage-
ment. In the following we are interested in the degree
to which a current-situation can be considered as a
flooding.
flooding
.
= sit ∃water-level.very(High)
curr-sit
.
= sit ∃water-level. =
7
On this background we can reason about the fol-
lowing statement:
KB |≈
deg
curr-sit flooding
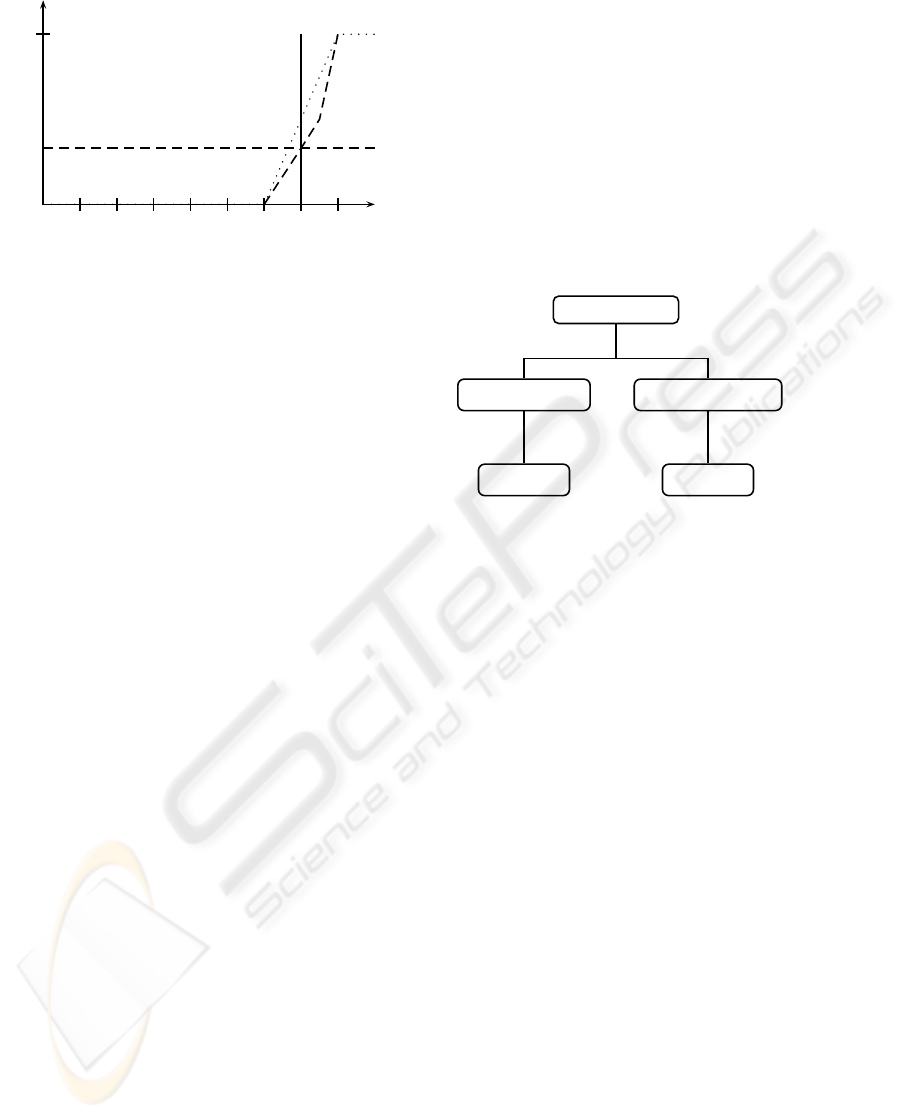
Intuitively we can give a visual account of the ar-
gumentation related to the problem (cf. Figure 3). For
the linear representation of very we use:
very(x)=
2
3
x :0<x<0.75
2x − 1:0.75 ≤ x ≤ 1
As as solution we obtain a support of .33 for the de-
gree to which the description of the current situation
is subsumed by the concept flood. We argue that this
kind of request may be a typical case concerning the
knowledge based support of context-awareness.
ICEIS 2006 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
102
12345678
0
1
.33
Figure 3: (Very) High.
agent
.
= ∃ water-level. =
0.7
Figure 4: Terminological Representation of an Agent’s
State.
3 KNOWLEDGE
In our approach a system’s current state is represented
in terms of knowledge and its location. On this back-
ground we can demonstrate the influences of knowl-
edge on the agents actions and the effects of these
actions on the distribution of knowledge. Consider-
ing our running example again it becomes clear that
knowledge about the environment (e.g. communica-
tion paths (or channels) has to be available when initi-
ating a communication act. As we already saw in Sub-
section 2.1 this knowledge may located in the agent
or in the environment. In this section we discuss the
question how such knowledge is represented and in
which way it can be accessed.
Agents. In our approach agents are modeled as P-
systems. Thus their state is represented by regions
and their knowledge by floating molecules. Since we
conceive these terms as assertions related to an ontol-
ogy we can use predefined complex concepts in order
to represent an agent’s state. In Figure 4 we show
a simple representation of an agents state. In this
case the agent’s state is characterized by the aware-
ness concerning the water level.
Note that this kind of representation is not acces-
sible for our observation-based approach in which
agents are treated as black-boxes. Following this
maxim of strict encapsulation we have to rely ex-
clusively on the observation functions know and next
in order to get information about knowledge and be-
havior. Note that this approach supports the formal
treatment of highly abstract characteristics of behav-
ior which are independent of individual details of cer-
tain agents.
In order to retrieve some information about the in-
s
0
.
= Communicate
s
1
.
= Conn-by-Conv
s
2
.
= Conn-by-Mobile
s
3
.
= Msg-Sent
s
4
.
= Msg-Sent
s
0
∃select-conv.s
1
s
0
∃select-mobile.s
2
s
1
∃send.s
3
s
2
∃send.s
4
Figure 5: Terminological Description of States and Transi-
tions.
Communicate
Conn-by-Conv
select-conv
Msg-Sent
send
Conn-by-Mobile
select-mobile
Msg-Sent
send
Figure 6: Example: Behavioral Description.
ternal state of the agent we have to use the observa-
tion function know in a way which is very similar to
requests to knowledge bases.
know
ag ent
(∃water-level.High), 0.33
4 BEHAVIOR
For the representation about behavior we ex-
ploit the correspondence between description log-
ics and propositional dynamic logic (first published
by (Schild, 1991)). This allows us to reuse the same
syntactic concepts (which we used for knowledge rep-
resentation in Section 3) for description of behav-
iors. Intuitively we use concepts for the description
of states while roles represent events which initiate
state transitions. As an example we give a simplified
description of the behavior in our example in Figure 5.
In order to support intuitive reasoning about behav-
ioral description we rely on simple a visual notation
(cf. Figure 6). In this notation the nodes of a tree rep-
resent states. The soft boxes contain (possibly com-
plex) concepts which have to hold in the particular
state. Edges are labeled with names of events (repre-
sented by role names).
Conformance. When reasoning about systems be-
havior an essential question is whether a given agent
is able to conform to a behavioral description. Again
KNOWLEDGE-BASED MODELING AND NATURAL COMPUTING FOR COORDINATION IN PERVASIVE
ENVIRONMENTS
103
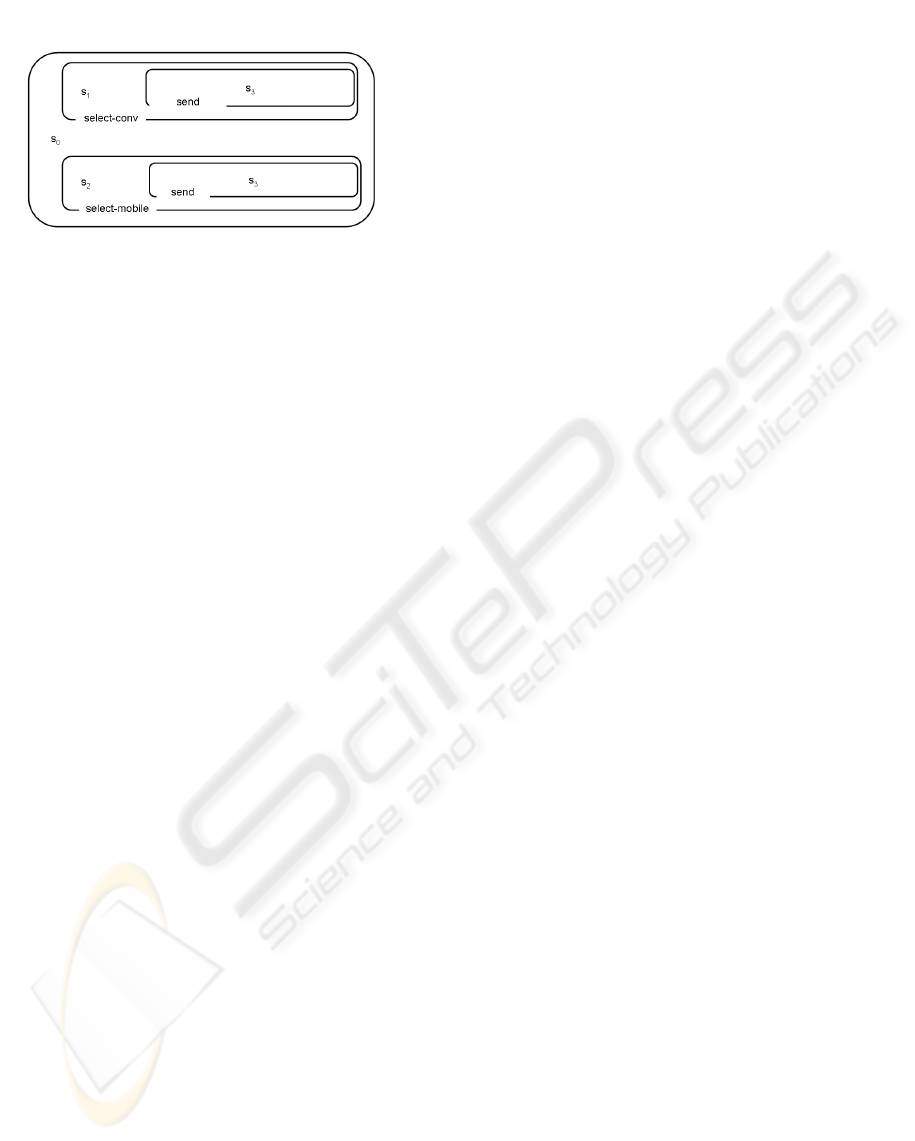
Figure 7: Behavior Represented by Nested Membranes.
we are not interested in retrieving the complete state
description or all capabilities of a given agent but ex-
clusively in the question if he is able to perform an
action which is described by a terminology. In order
to reason about problems of behavioral conformance
we introduce a tree-automaton which interprets be-
havioral descriptions as simulation experiments con-
cerning a certain agent (following (Vardi, 1998)). As
may be expected the functions know and next play a
prominent role in this experiments.
Since we rely on concepts from membrane comput-
ing again we first show how to transform tree-like be-
havioral descriptions into membrane-based represen-
tations (cf. Figure 7). For simplicity we restrict our
attention to finite trees with a branching factor equal
or less than two. The concepts s
1
,...,s
4
which were
defined in Figure 5 are now represented as molecules
floating in solutions contained in membranes. Succes-
sor states (of a given state) are represented by embed-
ded membranes which are labeled with a role name
representing the event whose occurrence is necessary
to access the state.
In order to support conformance testing it has to be
checked whether a given agent Ag supports a (possi-
bly incomplete) description of behavior. Intuitively in
our observation-based approach it is checked whether
the relevant concepts can be observed in the agent’s
current state and whether the concepts related to the
successor states can be observed in the the agent’s
successor states (which are accessed by the function
next). The relevant part of this line of reasoning can
be described by the following rule.
[know(Ag, A), [
a
A[
b
B]
b
[
c
C]
c
]
a
] →
[know(next(Ag, b),B), [
b
B]
b
],
[know(next(Ag, c),C), [
c
C]
c
],
when know(Ag, A)=true
Due to space limitations we only consider a very
simple and general case. If the complex con-
cept A which has to be satisfied in the current
state of Ag holds in the current state (indicated by
know(Ag, A)=true) all embedded membranes
(representing the successor states) are investigated
concurrently. For this sake the automaton creates sev-
eral copies of itself (one for each successor state). For
the description of this self-reproductive behavior of
the automaton we exploit the feature of membrane di-
vision which is described by (P
˘
aun, 2002). Note that
in this computational model large amounts of com-
putation space can be provided in linear time which
makes this type of computation surprisingly efficient.
On the right-hand side of the rule each copy of the au-
tomaton works on a successor state of A (reached by
Ag’s transition function next together with role names
b resp. c) and a subtree of the original behavioral de-
scription. For the sake of our example concept names
A (resp. B and C) have to be bound to s
0
(resp. s
1
and s
2
) while the role names b and c have to be in-
stantiated with select-conv and select-mobile. In this
case a would represent the empty role .
5 DISTRIBUTED ACTION
As we already stressed we are interested in the sup-
port of reasoning about very abstract descriptions of
systems behavior. Such incomplete specifications
support a style of reasoning which exclusively consid-
ers relevant characteristics of behavior (and neglects
unimportant details). In this Section we give an ex-
ample for the treatment of incomplete specifications
of distributed actions.
Again we consider our example concerning the
choice of communication channels in a highly dy-
namic scenario (e.g. disaster management). Our dis-
cussion in this section is based on the intuition that
for our purposes it does not matter which agent de-
cides about the selection of the channel (i.e. the agent
himself or the environment). We are interested in sup-
porting a style of reasoning which is general enough
to support both scenarios from Subsection 2.1 (i.e.
which is general enough to recognize the naive sce-
nario and the presence of an intelligent environment).
In order to support this style of reasoning we sim-
ply extend our behavioral description from Section 4
with the following definitions. After this we extend
our automaton with the rules which are necessary to
process these constructs.
select-conv
.
= sel-conv-ag sel-conv-env
select-mobile
.
= sel-mob-ag sel-mob-env
send-msg
.
= snd-msg-ag transfer-env
Note that in these terminological descriptions we
rely on complex roles for the description of complex
actions. In this case we again exploit the correspon-
dence between the description logics ALCFI
reg
and
ICEIS 2006 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
104

converse-PDL. For example for an occurrence of an
event select-conv it suffices that the event sel-conv-ag
or the event sel-conv-env occurs. For the occurrence
of event send-msg on the other hand we require the
events send-msg-ag and transfer-env to occur. These
constructs are processed by the following rules. Note
that we consider a complex agent C
Ag
= Ag, Env
in this example which consists from an elementary
agent Ag and the environment Env.
[know
D
(C
Ag
,A), [
a
A[
b
B]
b
]
a
] →
[know
D
(next(C
Ag
,b
1
),B), [
b
1
B]
b
1
],
[know
D
(next(C
Ag
,b
2
),B), [
b
2
B]
b
2
],
when know
D
(C
Ag
,A), b
.
= b
1
b
2
[know
D
(C
Ag
,A), [
a
A[
b
B]
b
]
a
] →
[know
D
(next(C
Ag
, [b
1
,b
2
]),B),
[
[b
1
,b
2
]
B]
[b
1
,b
2
]
],
when know
D
(C
Ag
,A), b
.
= b
1
b
2
Note that we treat a disjunction of subevents with
a rule which is similar to the rule in Section 4. Again
both branches of the disjunctions are processed con-
currently by individual automata. In the case of con-
junctions on the other hand we formulate our experi-
ment concerning the behavior of C
Ag
using a multi-
set of events [b
1
,b
2
] such that no assumption is made
about the order of these events. Note that we use
a specific observation function for the compositional
agent C
Ag
. We use the function know
D
for the rep-
resentation of distributed knowledge (cf. (Fagin et al.,
1996)). Formally a proposition φ is distributed knowl-
edge among the agents A
i
if it is contained in the uni-
fication of all their individual knowledge. In the con-
text of our example the following holds:
know
D
(C
Ag
,A) ⇔ know(Ag, A) ∨ know(Env,A).
6 COORDINATION
An essential problem in pervasive system consists in
the relation of individual agents and environment. Re-
lated questions are: how can an agent determine if his
actions make sense w.r.t. the behavior of the global
system? How can the consistency between individ-
ual information and the global state of knowledge be
ensured? From a systemic viewpoint this problem is
often called the scale gap (Krasnogor et al., 2005)
which may be observed between the behavior of the
individual and the strategy of the population. A typi-
cal scenario which illustrates the relevance of this is-
sue consists in a sudden and unexpected change of en-
vironmental conditions. Obviously it is necessary to
distribute information concerning the new state of af-
fairs as fast as possible. Especially it is not adequate
to distribute large quantities of information in such
situations. In fact it is prefered to distribute the mes-
sage that something happened as fast as possible. This
is necessary in order to prevent the agents from fol-
lowing strategies and routines which are inadequate
given the new environmental conditions.
We argue that the observation of social team perfor-
mance as well as the adoption of biological coordina-
tion mechanism can contribute to the solution of this
problem. As a starting point we take the observation
that in critical situations (which are frequently caused
by environmental changes) human agents do not re-
discuss all relevant topics. In fact they use they use in-
expensive communication mechanisms (e.g. nonver-
bal communication) in order to distribute the relevant
changes as fast as possible.
As a matter of fact such coordination mechanisms
have been observed in biology. Thus quorum sens-
ing is used by bacteria in order to coordinate individ-
ual behavior and the strategy of the population. In
our proposal we use the computational models which
were defined for this coordination mechanism using
P-systems. Especially we apply simplified versions
of the concepts described in (Krasnogor et al., 2005).
We claim that the application of these models is help-
ful for the understanding of social coordination and
for the enhancement of coordination in pervasive set-
tings.
Basic Mechanisms. Since we are not able to de-
scribe the overall model (due to space limitations) we
have to content ourselves with the discussion of some
basic mechanisms. Biological coordination heavily
relies on the production and distribution of signal
molecules which are collected in the environment in
order to reflect the actual global state. Agents can re-
ceive such molecules and draw inferences about the
situation.
Example. We claim that in complex systems in-
formation about some facts is distributed all over the
system by mechanisms which are subtle but highly
efficient. For the sake of modeling we reduce these
mechanisms to knowledge diffusion. We claim that
agents produce information which is floating in the
environment while executing cooperative tasks. For
example an agent which detects that the an environ-
mental conditions (e.g. the water level) deteriorates
distributes some information about this observation
while concurrently performing his tasks. We can
model this simple behavior by a rule which generates
information molecules.
[water-level-high] →
[(water-level-high, here), (serious-event, out)]
While the molecule water-level-high represents a
fuzzy assertion concerning the water level the mole-
cule serious-event is considered as a global stress in-
dicator. Note that this stress indicator is generated
KNOWLEDGE-BASED MODELING AND NATURAL COMPUTING FOR COORDINATION IN PERVASIVE
ENVIRONMENTS
105

repeatedly (as long as the water level is considered
as critical). Obviously the concentration of this type
of molecule in the environment is significant. Since
the environment’s state is represented by a multiset
the concentration can be represented by the molecules
cardinality. The degree to which a certain an agent
is susceptible to systemic stress can be modeled by
a constant τ which defines a threshold for the stress
niveau.
[serious-event
p
] → [need-to-act], p >τ
When a certain concentration of stress is reached
agents are urged to act. This alertness is represented
my a molecule need-to-act which may operate as a
catalyzator for further actions. When the situation has
stabilized the stress indicator is metabolized by the
environment (e.g. using rules like serious-event →
Λ). Note that the molecule serious-event represent
only very general and vague information w.r.t. the
systems global state. This usage of vague information
is typical for robust coordination in critical situations.
7 CONCLUSIONS
In this paper we focused on the diffusion of knowl-
edge in complex system and pervasive settings as a
major factor shaping global behavior. We argued that
a sensitive handling of this floating of information en-
ables new possibilities concerning the understanding
and creation of novel kinds of behavior. We intro-
duced concepts from description logics for the rep-
resentation of knowledge and demonstrated the treat-
ment of highly abstract and incomplete behavioral de-
scriptions. For the formulation of the related algo-
rithms we introduced concepts from membrane com-
puting. Finally we argued that the transfer of sophisti-
cated interactions and coordination mechanisms from
fields like biology or sociology is possible on the ba-
sis of this paradigm. As direct benefits of such an
approach we emphasize increased abilities to provide
meaningful behaviors in dynamic environments and
pervasive settings. Especially features like context-
awareness and autonomic behavior are supported by
this knowledge-based approach. Although we think
that the concepts from membrane computing are a
good foundation for modeling and simulation their
full computational power could solely exploited on
non-conventional hardware. We plan to extend our
research in this direction in the future.
We are indebted to the anonymous reviewers for
their lucid comments on an earlier versions of this pa-
per.
REFERENCES
Baader, F., Calvanese, D., McGuinness, D., Nardi, D., and
Patel-Schneider, P., editors (2003). The Description
Logic Handbook. Cambridge University Press, Cam-
bridge, U.K.
Berry, G. and Boudol, G. (1992). The chemical abstract
machine. Journal of Theoretical Computer Science,
96(1):217–248.
Fagin, R., Halpern, J. Y., Moses, Y., and Vardi, M. Y.
(1996). Reasoning about Knowledge. The MIT Press,
Cambridge, Mass.
Kephart, J. O. and Chess, D. M. (2003). The vision of auto-
nomic computing. IEEE Computer, 36(1):41–50.
Klir, G. J. and Yuan, B. (1995). Fuzzy Sets and Fuzzy Logic.
Theory and Applications. Prentice Hall, Upper Saddle
River, N.J.
Krasnogor, N., Georghe, M., Terrazas, G., Diggle, S.,
Williams, P., and Camara, M. (2005). An appealing
computational mechanism drawn from bacterial quo-
rum sensing. Bulletin of the European Association for
Theoretical Computer Science.
Leveson, N. (1995). Safeware. System safety and comput-
ers. Addison Wesley, Reading, Mass.
P
˘
aun, G. (2000). Introduction to membrane computing.
Journal of Computer and System Science, 61(1):108–
143.
P
˘
aun, G. (2002). Membrane Computing. An Introduction.
Springer, Berlin.
Pepper, P., Cebulla, M., Didrich, K., and Grieskamp, W.
(2002). From program languages to software lan-
guages. The Journal of Systems and Software, 60.
Perrow, C. (1984). Normal Accidents. Living with High-
Risk Technologies. Basic Books, New York.
Rutten, J. (1996). Universal coalgebra: a theory of systems.
Technical report, CWI, Amsterdam.
Schild, K. (1991). A correspondence theory for terminolog-
ical logics: Preliminary report. Technical Report KIT-
Report 91, Technische Universit
¨
at Berlin, Franklinstr.
28/29, Berlin, Germany.
Straccia, U. (2001). Reasoning with fuzzy description logic.
Journal of Artificial Intelligence Research, 14:137–
166.
Vardi, M. Y. (1998). Reasoning about the past with two-
way automata. In Proc. of the 25th International Col-
loquium on Automata, Lanugages,and Programming.
Springer.
Wooldridge, M. J. (1992). The Logical Modelling of Com-
putational Multi-Agent Systems. PhD thesis, Depart-
ment of Computation. University of Manchester.
Zadeh, L. A. (1965). Fuzzy sets. Information and Control,
8(3):338–353.
ICEIS 2006 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
106
