
A SIMULATION ENVIRONMENT TO EVALUATE DRIVER
PERFORMANCES WHILE INTERACTING WITH TELEMATICS
SYSTEMS
Gennaro Costagliola, Sergio Di Martino, Filomena Ferrucci
Dipartimento di Matematica e Informatica, Università degli Studi di Salerno,via Ponte don Melillo, Fisciano (SA), Italy
Keywords: Human-Computer Interaction, Human Factors, Virtual Reality, Vehicular Telematics Systems.
Abstract: The evaluation of user interfaces for vehicular telematics systems is a challenging task, since it is necessary
to understand the effects of interaction on driving performances. To this aim, in 2005 we developed and
presented a framework specifically conceived for the indoor evaluation of these systems. In this paper we
present some significant improvements of that proposal. In particular, we describe a graphical analysis tool
able to provide a clear and deep insight about driver behaviors using the high amount of data generated by
the simulator. Moreover, we report on the evaluation analysis that has been performed to assess the
effectiveness of the framework for measuring driving performances.
1 INTRODUCTION
Researches on User Needs report that people want to
be connected any time and any place, even in their
cars (Comunicar, 2002; Microsoft, 2005). To answer
this requirement, information and communication
technologies have been fitted into automobiles,
giving rise to Vehicular Telematics Systems (VTSs),
which represent the in-vehicle convergence of
mobile communications and information processing,
allowing drivers and passengers to stay in contact
with the world outside their car. VTSs allow drivers
to exploit a plethora of features, such as multiple
audio sources (MP3, DAB, and DVD), web
browsing, e-mails, phone calls, voice control, and so
on. Moreover, most advanced VTSs (e.g.: BMW
iDrive, Fiat Connect+ or GM onStar) are starting to
provide services, i.e. advanced functionalities
involving interaction with a support centre. Typical
examples are remote vehicle diagnosis, dynamic
route calculation (taking into account road, vehicle,
traffic and weather conditions), tele-aid, hotel
reservations, etc…
However, the diffusion of VTSs is also causing
concerns about road safety, since these systems can
heavily increase driver’s mental distraction (Burns,
2001; Tijerina, 2001), which is widely recognized as
the most prevalent cause of crash (Toms, 2001).
Thus, since road safety is paramount, it is a short
term priority to limit driver distraction inducted by
VTSs, by enhancing the usability of these systems.
Human-Computer Interaction in the automotive
domain can be considered a new and open research
area (Marcus, 2004). Specific tools and approaches
are required, mostly to assess the visual/cognitive
workload inducted by these systems and to
understand the effects of VTS interaction on driver-
vehicle performances.
Currently, several universities, companies and
research centers, have equipped laboratories with
sophisticated driving simulators, able to simulate a
high variety of physical phenomenon, ranging from
the kinematics effects inducted by different
suspension geometries, to very complex traffic
scenarios (for instance, the NADS (NADS, 2005)).
Some of them are used also for indoor evaluations of
VTSs, but these laboratories usually cost hundreds
of thousands of dollars and are very demanding to
set-up (Green, 2003), being prohibitive for small
institutions specifically focused on HCI research.
Thus, there is a strong needing for simpler VTS
evaluation systems, able in the meantime to assure
high-quality reports. To address this issue, in
(Costagliola, 2005) we proposed a framework
specifically conceived for the indoor evaluation of
VTSs User Interfaces (UIs). The goal of this
framework was to support researchers in an easy
collection of valuable data on driver’s behaviors
(and thus on mental workload), being in the
3
Costagliola G., Di Martino S. and Ferrucci F. (2006).
A SIMULATION ENVIRONMENT TO EVALUATE DRIVER PERFORMANCES WHILE INTERACTING WITH TELEMATICS SYSTEMS.
In Proceedings of the Eighth International Conference on Enterprise Information Systems - HCI, pages 3-10
DOI: 10.5220/0002498400030010
Copyright
c
SciTePress

meantime cost-effective, by requiring standard
hardware and simple set-ups.
In this paper we describe some improvements of
the framework and report on its evaluation. One of
the most distinguishing features offered by the
proposed framework was the possibility to assess the
navigation assistance provided by VTS, by
automatically generating virtual test tracks starting
from a VTS cartographical database. At the best of
our knowledge, currently no other simulation
facilities offer this specific but important feature,
compelling to evaluate on the field the VTS
navigation assistance module. In the following we
will describe how we have improved the realism of
generated tracks starting from a VTS cartography.
Indeed, the current version of the system is able to
reproduce much more realistic scenarios, taking into
account road types, contextual information, etc… As
a result, the realism and the sense of immersion in
the virtual scenario experienced by the subjects, that
represents a crucial feature for a simulation
environment, has been improved.
Secondly, to handle the huge amount of
experimental data collected per session, we
developed an apposite application, named Telemetry
Analyzer Tool (TAT). The aim of this tool is to
support the data analyst in understanding the
relationships occurring between VTS interactions
and driving performances, by providing a clear,
graphical representation of the subject behaviours,
such as input on controls, followed trajectory, etc…,
related to the timeline of the test. This is a highly
demanded feature (Barr et al., 2003), leading to the
generation of high-quality, repeatable analysis and
reports.
Moreover, we have carried out an evaluation
analysis meant to verify the effectiveness of the
proposed approach for measuring on-road driving
performances. To do that, we have employed a set of
sixteen subjects. The conducted tests report that after
about 20-25 minutes of training, subjects behave on
the simulator in a way similar they drove a real car,
thus supporting the validity of the simulator.
The remainder of the paper is structured as
follows. In section 2 we introduce the main aspects
to consider when dealing with driver distraction, as
well as the approaches used to evaluate it. In section
3 we briefly recall the main characteristics of the
evaluation framework, then we will focus on how
we integrated the driving simulator and the vehicular
navigation module. In section 4 we describe the data
analysis features we developed, while in section 5
we report on the assessment of the framework.
Finally, a discussion on final remarks and future
work will conclude the paper.
2 VTS USER INTERFACE
EVALUATION ISSUES
Usability evaluation of traditional desktop
applications can be considered an established topic
within HCI. It is based on a shared understanding of
basic concepts and extensive guidelines (e.g.
(Nielsen, 1993)).
However, these established concepts,
methodologies, and approaches in HCI are being
challenged by the increasing diffusion of ubiquitous
computing, i.e. applications executed on wearable,
handheld, and mobile computing devices. This move
beyond stationary use is requiring new approaches to
evaluate mobile UIs. Indeed, the main difference is
that mobile systems are typically used in highly
dynamic contexts, where the user is normally busy
in other primary tasks, such as walking, driving,
etc… (Lumsden, 2003).
This holds especially for the evaluation of VTS
UIs. Indeed, static evaluations of these interfaces,
performed with a subject totally focused on the
system, do not provide significant information about
the effectiveness of the UI. Instead, it is necessary to
set up a meaningful test-bed, where subjects are
mainly focused on the primary driving task and
concurrently interact with the VTS. Researchers can
evaluate driver distraction through the analysis of
some indirect indicators on vehicle dynamics.
To accomplish these tests, two approaches can be
adopted:
1. the interaction with a VTS is analyzed while the
user is driving a real car (eventually on a track
closed to the traffic), or
2. the driving is simulated in a laboratory, through
some real-time computer-generated virtual
scenarios.
Each of the two approaches presents advantages
and drawbacks. The former is more realistic,
because the subject drives a “real” car. However, it
requires the availability of a car equipped with
specific instrumentation able both to capture
information such as travel speed and lane position
and to video record the road scene and driver eye
glance (e.g. (Tijerina, 1998)), and possibly of a
closed track. Moreover, usability evaluations on the
field are not easy. Three fundamental difficulties are
reported in the literature. Firstly, it can be very
complicated to establish realistic cases capturing key
situations in the dynamic context above described
(Nielsen, 1998). Secondly, it is far from trivial to
apply established evaluation techniques, such as
observation and think-aloud when an evaluation is
conducted in a field setting (Pascoe, 2000). Thirdly,
field evaluations complicate data collection and
ICEIS 2006 - HUMAN-COMPUTER INTERACTION
4

limits researchers controls, since subjects are acting
in an environment with a number of unknown
variables potentially affecting the set-up (Johnson
1998). In particular, the last issue heavily applies to
naturalistic tests in the vehicular domain, since data
are usually collected by some video cameras, and
many studies report how time-consuming and labor
intensive is gathering data from these videos (Barr et
al., 2004), providing in the meantime low-quality
reports.
On the contrary, driving a virtual car, simulated
by computer graphics in a laboratory, significantly
reduces the above difficulties, since tests are
accomplished in a safe and controlled environment,
where the risk of personal injury and property
damage is eliminated. Moreover, it is more
comfortable for researchers, which can get a higher
amount of high quality data and carry out more
controlled and repeatable tests, by presenting to
different subjects the same scenarios. The main
difficulty is to provide an adequate degree of realism
in the virtual scenario, since car dynamics and
activities in the subject’s physical surroundings can
be difficult to recreate realistically (Pirhonen et al.,
2002). Thus, in order to ensure significant results of
the tests, it is necessary to develop simulation
environments which exhibit a high level of realism.
3 THE PROPOSED TEST-BED
The test-bed we proposed in (Costagliola, 2005) was
aimed at presenting a realistic simulated driving
environment to conduct indoor evaluations of VTS
UIs, by providing subjects with credible feedbacks
for their actions (e.g.: steering wheel shake when
leaving the lane and going off-road), and sense of
presence in the virtual environment, being in the
meantime cost-effective both in terms of hardware
and personnel resources. The test-bed is intended as
an integrated framework, composed of three main
facilities: a driving simulator running on a graphical
workstation, a VTS, and some tools to analyze
subject’s behaviours, stored in a telemetry database.
In order to provide driving features, we
customized an open-source car simulation engine,
the Racer system (Van Gaal, 2000). We choose this
engine thanks to its many advantages: it provides
satisfactory dynamics of the virtual vehicle by using
6 Degree-Of-Freedom models and motion formulae
from Society of Automotive Engineers, it is very
flexible, since almost all simulation parameters are
customizable through text files, there is enough
documentation, it supports force-feedback devices, it
provides high-quality OpenGL rendering, the tracks
and the scenes are quite easy to create both by
scratch or through many free user-friendly editors,
and last but not least, it is free for non-commercial
use.
Figure 1: The test-bed Architecture.
Special care has been devoted to enhance the
sense of presence of the subject in the virtual
environment. Subjects sit on a car seat, interacting
through a force-feedbacks steering wheel, able to
return realistic haptic feedbacks to driving input, and
two foot pedals. The simulated scenario is projected
onto a wide-screen covering a significant subject’s
angle of view (>135°), while a 5.1 surround system
provides a realistic spatial audio, as suggested by
(Green, 2003).
To get data able to inform on driver distraction,
the simulator was customized to offer some further
features, such as the possibility to generate
asynchronous external events to test driver’s
response times. For instance, to add meaningfulness
to the simulation, other simulated cars were added
on the track with their own (repeatable) behaviors.
To recreate these situations, we exploited the Racer
features related to the Artificial Intelligence (AI),
allowing for a basilar simulation of traffic
conditions, programming different vehicles to follow
specific routes and behaviors on the track.
The simulation engine has been enriched and
complemented by some tools we have developed
specifically to address vehicular issues. The former
tool, allowing for an integration of the VTS
navigator module in the simulated environment, is
described in the following.
3.1 Integration of the Navigator in
the Simulated Environment
The first distinguishing feature offered by our
framework is the integration between the simulation
engine and the VTS navigator module. Currently, at
best of our knowledge, evaluations of the navigation
assistance subsystems can be performed exclusively
on the field, since virtual tracks employed in
simulations usually are not a counterpart of a real
A SIMULATION ENVIRONMENT TO EVALUATE DRIVER PERFORMANCES WHILE INTERACTING WITH
TELEMATICS SYSTEMS
5

geographic area. Even if dealing with digital
reconstructions of existing roads, driving simulators
do not provide features for converting in real-time
the spatial coordinates of the virtual car into real
GPS ones. Hence the navigator has not knowledge
about the virtual car position, resulting of no use in
indoor evaluations.
To address this issue, we developed two
subsystems: one responsible to generate a Racer
track stating from a real cartography, and one able to
translate the coordinates of the virtual car driven by
the subjects, into a stream of bytes emulating a real
GPS serial sensor sent to the VTS. As a result, the
road virtually driven by the user on the simulator is
shared as a map on the VTS. This permits to exploit,
indoor, many standard navigation features, such as
Map Display and Route Guidance. This integration
is a powerful instrument, enabling to perform many
significant tests. For instance, it allows researchers
to evaluate different modalities (vocal, iconic, etc…)
for providing routing assistance to the user, or the
most appropriate vocabulary to support the way-
finding, as well as to assess the cognitive work
inducted by these different approaches.
In the following we will describe how we have
developed this feature.
3.1.1 Sharing the Cartography
The Racer engine adopts a proprietary graphical
format to represent tracks, named DOF1 and based
on the SGI IFF file format. DOF1 exploits OpenGL
XYZ coordinate system and contains all the
information about the scene graph of the model. In
particular, it holds data about the geometry objects
composing the track, i.e. information about the
vertices and the normals, together with other data,
such as the texture used to render the surfaces.
It is worth pointing out that currently there exist
two standard global cartographical databases
adopted in the automotive domain: the Navteq and
the TeleAtlas one. We focused on the former, thanks
to the availability of a powerful SDK, useful to
manage navigation system applications and to
interact with the Navteq open format SDAL (SDAL,
1999) used for the map database.
In order to obtain a shared cartography, we
developed a tool able to generate an appropriate
DOF1 track file starting from an arbitrary sized
rectangular area of a SDAL map. In particular, this
translator generates the geometry primitives starting
from the parcels that are the basic units of I/O used
in the SDAL format.
Figure 2 (left) shows a
rectangular area of a SDAL map, while
Figure 2
(right) illustrates the corresponding generated DOF1
track.
Another challenging issue was about road width,
since SDAL does not contain such information.
Instead, for each segment representing a section of a
road, there is an associated attribute, the Rank,
indicating its rating, based on characteristics such as
speed limit, road type (e.g., interstate, highway) and
access limitations. For instance, rank 0 represents
the lowest one (local streets), while rank 4 represents
the highest level (national arterial road network).
Basing on this information we defined 10 kinds of
road templates (two for each rank, to consider one or
two-way roads), each one with its own geometries
and textures to represent different number of lanes,
presence of guard-rails, etc…
Figure 2: A real SDAL map (left), and the corresponding
generated DOF1 one (right).
3.1.2 Updating the Localization
To address the second issue concerning with
updating in real-time the position of the car on the
map we have let the simulator to export information
about the car movements and the navigator to accept
this information as if it comes from GPS sensor. In
particular, it was required to get information about
coordinates, speed, and heading of the car. Racer
engine is able to output this information, for various
purposes (multiplayer, logs, etc…). Thus, we
implemented a daemon able to catch this
information and, after some elaboration, to send the
necessary data on a serial port, emulating a real GPS
sensor. In this way, every VTS (or even PDA) able
to be connected to a GPS serial sensor can be linked
to the simulation environment, providing real-time
route guidance information.
4 DATA ANALYSIS
In order to assess a VTS UI, it is important to
quantify the “safety degree” of the considered VTS.
Nevertheless, safety cannot be directly measured
(probably except in retrospect) (Tijerina, 2001). In
the literature, several indirect measures of safety
have been proposed based on the evaluation of the
driver distraction inducted by the system (e.g.
(Camp, 2000)). Let us recall that, when dealing with
ICEIS 2006 - HUMAN-COMPUTER INTERACTION
6

vehicles, two main kinds of distraction should be
considered, namely the visual one and the cognitive
one. Each of them leads to different problems:
degraded vehicle control (resulting in problems in
lane-keeping, speed maintenance, etc…), and
degraded object/event detection (looked-but-did-not-
see) (Brown, 1994), which is a more insidious to
evaluate, since vehicle control remains largely
unaffected but detection and reactions of unexpected
object and event is degraded (Tijerina, 2001).
Several indicators have been proposed to measure
driver distraction during a test session. Among these,
the most important are speed maintaining, input
smoothness, lane-keeping (see Figure 3), car
following performance, and driver reaction times to
asynchronous events (Tijerina, 2001).
Figure 3: Distance to be measured for Lane-Keeping.
It is worth noting that the result of a VTS
usability assessment is a set of telemetry data, i.e. a
lot of numerical information, such as user input and
vehicle dynamics, describing how the car and the
driver behaved during the experiment. It is important
to properly analyze this valuable amount of data in
order to get information on subjects’ distraction and
highlight potential degraded vehicle controls or
degraded object/event detection. Moreover, these
telemetry data can allow researchers to infer how
subjects’ visual/cognitive workload is influenced
when external factors are changed. For instance, it is
possible to understand the consequences of
exploiting different sensorial channels or different
layouts for VTS graphical user interfaces, by
comparing the gathered test datasets on the same
subjects. In order to properly analyze these data, it is
necessary provide analysts with suitable tools
supporting them during information interpretation.
To this aim, the proposed framework has been
enhanced with a specific data analysis environment,
detailed in the following.
4.1 The Telemetry Analyzer Tool
The Racer provides a built-in logging feature, which
was customized to gather all the needed telemetry
data. In particular, during a test running, each 250
milliseconds we sample the following parameters:
• Time
• User Input
o Steering input
o Force Feedback output
o Throttle input
o Brake input
• Vehicle Dynamics
o yaw, pitch and roll
o vx, vy and vz
o ax, ay and az
o x, y and z
o Overall distance
• VTS I/O (if possible)
o Key pressed on the VTS prototype
o Asynchronous events generated by
VTS
All these data are stored in a log ASCII file.
Separate files are used to store other significant
information, such as details on asynchronous events
generated both by the simulator, (i.e.: AI controlled
cars actions), and/or by the tester (i.e.: actions
required to be achieved by the subject).The amount
of data collected per session in this way can be
really impressive. For instance, a 20 minute
registration (a typical duration for a VTS test
session) generates a data matrix with about 4800
rows and tens of thousand of cells. As a result, it is
almost impossible to effectively analyze this huge
but fundamental amount of data without a suited
supporting tool. Neither standard analytics software
products, such as R, Statistica or Excel can
successfully address this issue, since it is very
difficult for a researcher to understand the most
significant distraction indicator, the lane-keeping
(shown in
Figure 3), without a graphical
representation of the subject’s followed trajectory
overlapped to the testing track.
Thus, there is a strong needing for a supporting
tool, able to graphically visualize the fundamental
parameters describing subjects’ behaviours. To
answer this issue, we developed an integrated
application, named Telemetry Analyzer Tool, whose
main objective was to visually render the driver-
vehicle performances during the whole test session.
In particular, the tool graphically presents both the
temporal/spatial relationships among data (that
usually are difficult to understand in a textual way),
both the main subjects’ actions together with other
A SIMULATION ENVIRONMENT TO EVALUATE DRIVER PERFORMANCES WHILE INTERACTING WITH
TELEMATICS SYSTEMS
7

numerical information, such as speed, time, and
overall distance.
In the following the main features of the tool and
its user interface are detailed.
4.1.1 Main Features of the Developed Tool
The tool offers three main features. Firstly, it
visually present all subject’s input, time by time. To
control the timeline of the logged data, the tool
provides some widgets, recalling an interface of a
Video Recorder, allowing a researcher to gain a deep
insight on subject’s behaviours, through the whole
test session.
Secondly, it provides a visual representation of
the trajectory followed by the subject, overlapping
the map of the track. To evidence driving errors,
whenever the trajectory followed by the vehicle’s
centre of gravity comes within less than 50 cm of the
left/right edge of the lane, it is represented in red
colour (or in a different shape) for the specific
frame.
Thirdly, it provides some comprehensive report
on the test session, such as the percentage of time
spent too near or too far from the central line, etc…
The resulting user interface is shown in
Figure 4.
Figure 4: The Telemetry Analyzer Tool GUI.
As depicted, it is possible to notice that the UI is
divided in three horizontal zones:
• The uppermost contains the widgets suited to
load track and log files and to manage the
timeline through some controls recalling a
VCR. Through these controls it is possible to
select a specific frame t
i
, a time-interval t
i
-t
j
, or
to playback the entire test session t
0
-t
n
. It also
possible to change the time scale, to accelerate
or slow down the playback, as well as to move
frame-by-frame.
• The central section is aimed at dynamically
present visual information about user
behaviours, for the current frame t
i
. Once
selected an instant of time t
i
, or for each frame
during the playback, it renders the status of all
user input at t
i
. In particular, driver input on
brake and throttle are rendered through some
histograms, while the steering wheel angle is
presented both visually and numerically. This
section provides also information about main
parameters on vehicle dynamics, such as
heading, speed, and roll, useful to evaluate
overall input smoothness.
• Finally, a lower section shows a top view of the
track, with the trajectory held by the subject in
the current frame/interval. This section also
encompasses widgets suited to control zoom,
pan, and rotation of the track.
About numerical reports, the tool is able to
invoke the Microsoft Excel DCOM control to
generate graphs of the collected data, on a number of
different parameters. Some examples of generated
scatter plots are visible in Figures 4 and 5.
5 ASSESSING THE PROPOSED
TEST-BED
As stated in section 2, the potential problem with an
indoor simulator is the lack of realism. To this aim,
we conducted a preliminary study to validate the
effectiveness of the simulator in measuring real
driving performances, by involving a group of
sixteen external subjects. To gain insight on the
realism of the framework, we applied methodologies
proposed in other simulators’ assessments (e.g. (Lee,
2002), ()). In the following we provide the details on
the assessment.
5.1 The Subjects
Sixteen volunteers (11 males, 5 females) were
involved in the study. Age of the subjects varied
between 24 and 42 years (mean 31.6). All
participants have a valid driving licence, a good
corrected visual acuity, and years of driving
experience ranged from three to 21 (mean of 10.4).
Annual mileage was between 2,400 and 25,000
(mean of 8,250). We asked them also details on
typical driven roads, mean number of hours spent in
driving per week, and if they usually play at driving
computer games. Four subjects stated that they spent
over 1 hour each week playing computer games that
involved driving (racing). Two subjects reported no
ICEIS 2006 - HUMAN-COMPUTER INTERACTION
8
previous experiences with driving games. The other
participants reported to play computer games only
occasionally.
5.2 Methodology
The experiment consisted of three driving sessions,
gradually increasing in difficulty. Whenever a
sufficient level of proficiency was rated, subject
move the next step. After completing the driving
tasks, subjects received a questionnaire, to express
their impressions on the simulator.
During the first session of the experiment, we
tested elementary driving skills, such as steering,
acceleration and braking control. Subjects were
instructed to drive on a simple and flat track,
composed of many straights, and few, easy turns,
maintaining a stable speed of 60 km/h, if possible.
Just before a curve, they were asked to reduce speed,
to enable a smoother turning.
The second session of the experiment was based
on a more complex track, representing a hill road,
with turns, tunnels, climbs and descents hills, harder
turns, and other cars. Again, we asked subjects to
maintain a steady speed of 80 Km/h, and to never
pass 100 Km/h, a harder task due to the specific
characteristics of the track.
In the third session, subjects were asked to
perform some secondary tasks on a VTS, while
concurrently continuing to perform the primary
driving task. The track was easier than the previous
one. Subjects had to respect the signals, to keep a
mean speed of about 80 Km/h, if compatible with
track properties and speed limits, and to never pass
100 Km/h.
Approximately each session took 20 minutes per
subject. The selected test tracks were intended as
closed circuits, and each subject was asked to drive
for three laps, to better understand improvements in
vehicle controls.
Obviously, during each session we logged all the
parameters described in Section 4.
5.3 Results
We observed that the simulator has a smooth
learning curve. Subjects familiarized very quickly
with the simulator, reaching adequate performance
after 15-20 minutes of training. In particular, after
some initial hesitations due to the different steering
response, subjects were able to profitably drive the
vehicle, maintaining constant speed and being able
to correctly keep the lane. Moreover, these
behaviours were achieved through smooth input.
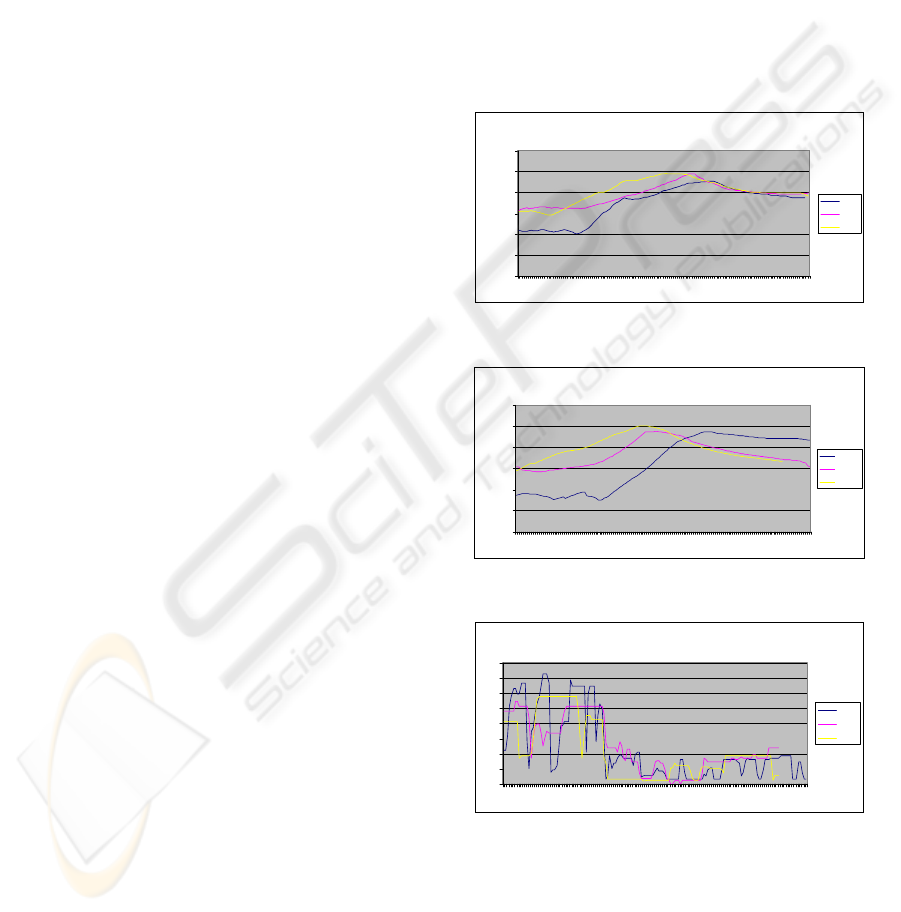
A graphical representation of such improvements
is given in
Figure 5 and Figure 6. Such figures plot the
speed hold by Subjects 2 and 5, respectively, in the
same section of the track, on the three different laps
during session 2. We selected for the graph a
segment where the road descents, turn right and then
climbs. Thus it is very demanding to maintain
constant speed, and in particular to not overpass the
100 km/h. Looking at graphs, it is possible to notice
that in the first lap (the blue line), subjects were not
able to smoothly maintain the speed. Indeed, the line
presents steps, and, in case of S5, it varies from 30
to 95 Km/h. Lap 2 (the purple line) and 3 (yellow
line) were smoother, indicating enhancements in
driving performances.
Subject 2
0
20
40
60
80
100
120
Seconds
Km/ h
Lap1
Lap2
Lap3
Figure 5: Subject 2 driving behaviour.
Subject 5
0
20
40
60
80
100
120
1 10192837465564738291100109118127136145
Km/h
Lap1
Serie2
Serie3
Figure 6: Subject 5 driving behaviour.
Throttle S2
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
1 10 19 28 37 46 55 64 73 82 91 100 109 118 127 136 145 154
Lap1
Lap2
Lap3
Figure 7: Subject 2 throttle behaviour.
Similarly, in Figure 7 it is possible to appreciate
improvements in the throttle control, through the
various laps. Once completed the driving sessions,
subjects filled in a questionnaire, to express their
impressions on the simulator. About results, in
mean, subjects felt the simulator enough realistic
A SIMULATION ENVIRONMENT TO EVALUATE DRIVER PERFORMANCES WHILE INTERACTING WITH
TELEMATICS SYSTEMS
9

(6.57, in a ramp 0..10), even if more stressing and a
little more difficult than real driving.
However, some concerns come from the steering
wheel, which resulted too much direct in its action,
being different from the real one. This is due to the
economical input device, which is more game-
oriented. Indeed, its excursion is limited to about
200° from full left deflection to full right deflection.
In real car this value is comprised from 360° and
720°. We are currently searching for more realistic
steering wheels. Telemetry data analysis and survey
result are omitted for sake of brevity, but are
available upon request.
6 CONCLUSIONS AND FUTURE
WORK
Safety on the roads is one of the main goals for
everyone involved in the automotive field. The
advent of VTSs can distract user from the main task
of driving the car, with potentially fatal effects.
Nevertheless, it has been estimated that these
systems will become commonplace in the last few
years. Thus, it is a short term priority to investigate
solutions to enhance usability of VTSs and then
limit driver distraction. Nevertheless, the evaluation
of UIs for automotive systems is a challenging and
expensive task, requiring specific methodologies and
tools. To address this issue, we realized a framework
specifically conceived for the indoor evaluation of
VTSs usability. In this paper we reported on some
improvements we developed, aimed at enhancing the
effectiveness of that test-bed. In particular, we
developed some instruments to offer the possibility
to assess also the navigation assistance provided by
VTS in the indoor facilities, thanks to the automatic
generation of realistic simulator tracks starting from
a VTS cartography.
Moreover, to support researchers in an easy
collection of valuable information on driver’s
behaviors (and thus on his/her mental workload), we
developed a specifically suited application, aimed at
providing a graphical representation of the main
driving parameters and subject behaviors. Finally,
we validated the framework in measuring on-road
driving performances, by employing a set of sixteen
subjects, with positive results.
About future work, we are working to add
further realism to the generated scenario, in order to
recreate the surrounding environment, since SDAL
contains further information about the kind of area
(country, national park, urban, etc…). For instance,
for urban zones, we are working to generate
scenarios with buildings, semaphores, etc…
REFERENCES
Barr, et al. 2003. Exploratory Analysis of Truck Driver
Distraction Using Naturalistic Driving Data. 82nd
Annual Meeting of the Transportation Research
Board, Washington, DC, January 12-16, 2003. (P03-
2897).
Brown, I. D., 1994. Driver fatigue. Human Factors, 36
(2), 298-314
Burns, C. Lansdown, C., 2001. E-Distraction: The
Challenges for Safe and Usable Internet Services in
Vehicles
CAMP, 2000. Crash Avoidance Metrics Partnership
(CAMP), Proposed Driver Workload Metrics and
Methods Project
Comunicar, 2002. ComuniCar Project Deliverable D2.2,
“User needs expectation and acceptance”. Web Site:
http://www.comunicar-
eu.org/archive/documents/D2_2.doc
Costagliola, Di Martino, Ferrucci., (2005), A Framework
for the Evaluation of Automotive Telematics Systems.
In Proceedings of the 7
th
International Conference on
Enterprise Information Systems (ICEIS 2005)
Green, P., 1999. SAE J2364 – Navigation and route
guidance function accessibility while driving.
Warrendale, PA: Society of Automotive Engineers.
Green P. et al., 2003, Audio-Visual System Design
Recommendations from Experience with the UMTRI
Driving Simulator, in DSC North America 2003
Proceedings, Dearborn, Michigan.
Juliussen E., 2003. “The Future of Automotive
Telematics”. In Business briefing: global automotive
manufacturing & technology 2003
Lee H., 2002. The Validity of Driving Simulator to
Measure On-Road Driving Performance of Older
Drivers. In Proceeding of 24
th
Conference of
Australian Institutes of Transport Research, Sydney,
2002.
Lumsden J., Brewster S. 2003, A Paradigm Shift:
Alternative Interaction Techniques for Use with
Mobile & Wearable Devices, In Proceedings of
CASCON workshop, 2003
Marcus A., 2004. Vehicle User Interfaces: the next
revolution, Interactions, 1.
Microsoft, 2005. “Microsoft Software and Solutions for
the Automotive Industry”. WebSite:
http://www.microsoft.com/automotive/
NADS, 2005. National Advanced Driving Simulator. Web
Site: http://www.nads-sc.uiowa.edu/
Tijerina L., Parmer, E., Goodman, M., 1998. Driver
workload assessment of route guidance system
destination entry while driving: a test track study. In
Proceedings of the 5th ITS World Congress, Seoul,
Korea.
Tijerina L., 2001. Issues in the Evaluation of Driver
Distraction Associated with In-Vehicle Information
and Telecommunications Systems
Van Gaal, 2000. Racer Simulator Engine, available at
www.racer.nl
ICEIS 2006 - HUMAN-COMPUTER INTERACTION
10
