
M-Traffic - A Traffic Information and Monitoring
System for Mobile Devices
Teresa Rom
˜
ao
1,3
, Lu
´
ıs Rato
1
, Pedro Fernandes
1
, Nuno Alexandre
1
,
Ant
˜
ao Almada
2
and Nuno Capeta
2
1
Universidade de
´
Evora, R. Rom
˜
ao Ramalho 59, 7000
´
Evora, Portugal
2
YDreams, Madan Parque - Quinta da Torre, 2829-516 Caparica, Portugal
3
CITI/FCT/UNL - Quinta da Torre, 2829-516 Caparica, Portugal
Abstract. This paper presents Mobile Traffic (M-Traffic), a multiplatform online
traffic information system, which provides real time traffic information based on
image processing, sensor’s data and traveller behaviour models. In order to es-
timate route delay and feed the optimal routing algorithm a traffic microscopic
simulation model is developed and simulation results are presented. This mobile
information service ubiquitously provides users with traffic information regard-
ing their needs and preferences, according to an alert system, which allows a
personalised pre-definition of warning messages.
1 Introduction
Mobile Traffic (M-Traffic) is a R&D project developed jointly by YDREAMS (www.yd
reams.com), Universidade de
´
Evora (www.uevora.pt) and Siemens AG (www.siemens.c
om ), and it proposes an advanced technological solution for providing street traffic in-
formation. The proposed solution takes advantage of video cameras in places where
traffic conditions are most difficult. Based on these images, the system will provide its
functionalities, which go far beyond displaying video information in real time. Images
are processed in order to adapt to various types of devices, which in turn permit the ex-
traction of quantitative and qualitative data about the traffic flow. All the information is
georeferenced with a geographic information system and can be visualised on different
devices such as PCs, mobile phones or PDAs. Together with the streamed video, M-
Traffic offers a set of functionalities suitable for different types of users and appropriate
to diverse distribution devices. These functionalities rise from image processing, sensor
data and the use of traffic flow models, which simulate and predict traffic conditions.
The purpose of traffic simulation models is towfold. First, to estimate the traffic flow
and time delay in segments of street network which are not covered by sensors and
second, to predict the evolution of traffic conditions. These estimates are the base to
routing algorithm. M-Traffic has been developed for the city of Lisbon, but its modular
structure turns its adaptation to be used in any other city in a straightforward task.
Romão T., Rato L., Fernandes P., Alexandre N., Almada A. and Capeta N. (2006).
M-Traffic - A Traffic Information and Monitoring System for Mobile Devices.
In Proceedings of the 3rd International Workshop on Ubiquitous Computing, pages 87-92
DOI: 10.5220/0002500000870092
Copyright
c
SciTePress
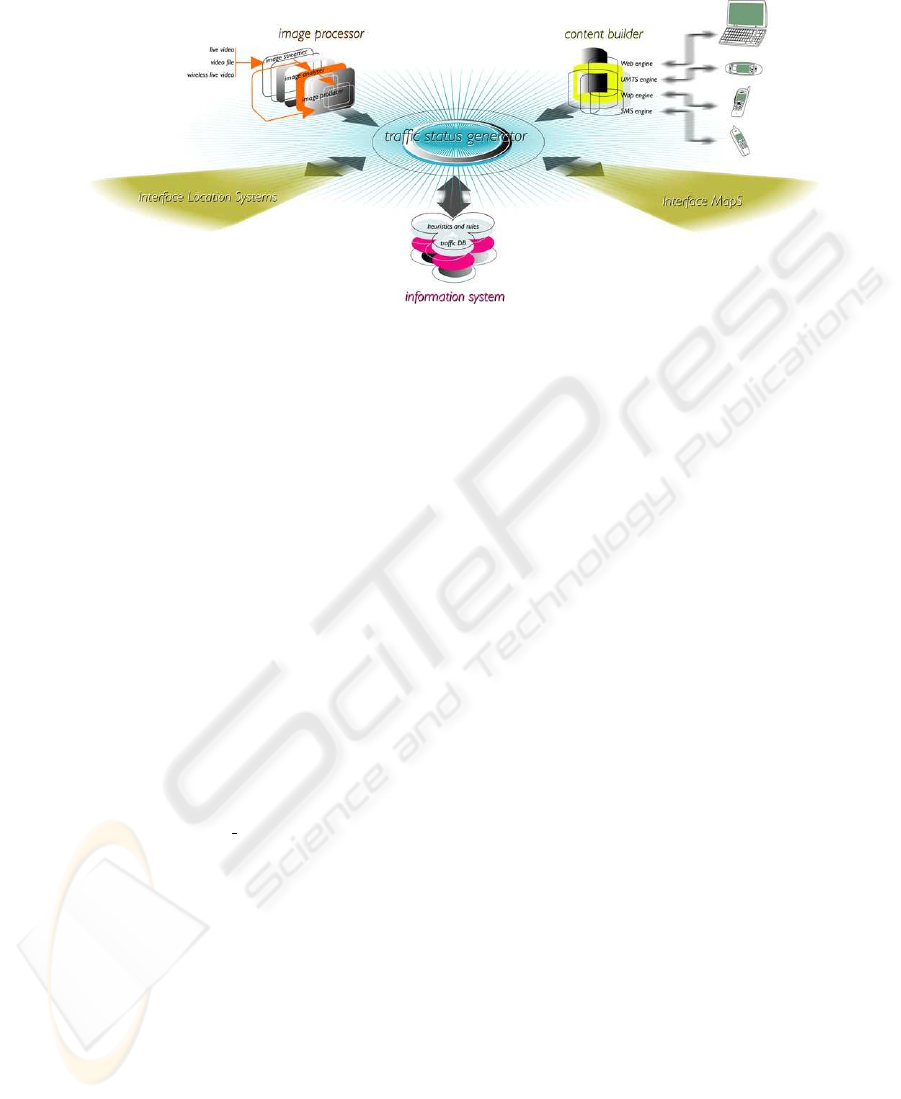
Fig.1. M-traffic system architecture.
2 Related Work
In addition to the traditional traffic information services available through the radio and
television, several web sites offer on-line traffic information. Typically this informa-
tion is manually maintained by human operators and may not be appropriately updated.
Usually, these services do not provide reliable estimations for the duration of trajecto-
ries, once they consider just a few points of measure, and they only provide information
concerning the current situation, not predicting traffic condition.
TrafficMaster (http://www.trafficmaster.net/) provides traffic information services
for UK, including live traffic information on WWW enabled devices, map-based con-
gestion information and a suite of personalised mobile telephone traffic information
services, WAP traffic maps and favourite journey reporting. Traffic information is also
made available by AA (Automobile Association), (http://www.theaa.com), where users
are able to plan routes, examine traffic conditions and view incident reports. Some sys-
tems also provide real time contextual traffic images for monitoring traffic conditions
including video streaming. The AirVideo traffic service available by TrafficLand Com-
pany (http://www.traffic
land.com/airvideo
intro.php) displays live views from several public traffic cameras, in
Washington DC area, on Web-enabled cellular phones. Inrix (http://www.
inrix.com/default.asp) uses Bayesian machine learning algorithms to make statistical
inferences and predictions about traffic, based on variables such as weather condi-
tions, construction schedules, holidays, sporting events, and historical traffic patterns.
Users will be able to acess the technology via partner channels on a variety of de-
vices. Circumnav Networks (http://www.circumnavnetworks.com/) turns the cars them-
selves into traffic data-collection devices, which then share the data wirelessly with
other Circumnav-powered cars. The Autoscope system by Image Sensing Systems, Inc.,
(http://www.autoscope.com/index.htm), provides wide area video vehicle detection by
using a high performing microprocessor-based CPU with specialised image processing
boards contained in either a camera, box or card format and software to analyse video
88

images. Research undertaken at MIT prompted the development of DynaMIT system,
which anticipates traffic flows using a database of past conditions and real-time speed
measurements and vehicle counts (http://mit.edu/its/dynamit.html) [2, 3]. The key to the
functionality of DynaMIT is its detailed network representation, coupled with models
of traveller behaviour.
Classic approaches to traffic modelling is based either on fluid flow model either
on microscopic behaviour of each car-driver system [4]. Approaches based on cellular
automata have also been successfully develop to traffic modelling [5].
3 System Description
The Mobile-Traffic project comprises the conception, design and validation of a geo-
referenced multiplatform online traffic information system, which provides real time
traffic information based on image processing, sensor’s data and traveller behaviour
previewing models.
This system architecture follows the client-server model and is based on several
structurally independent, but functionally interdependent modules (fig. 1). Therefore,
the system can easily be adapted to new data resources and additional distribution plat-
forms. The most relevant modules composing M-Traffic system are Image Processor,
Information System, InterfaceMapS, Interface Location Systems, Traffic Status Gen-
erator, and Content Builder. M-Traffic provides georeferenced data in diverse formats,
according to the user’s needs and the characteristics of the client devices (PDAs, mobile
phones, PCs). Fig 2 exemplifies the system’s user interface for mobile phones. The sys-
tem allows users to personalise the application to facilitate the access to the data they
most frequently need. Users may create their own profile, which allows them to receive
the information they require as soon as they enter the system. They can also configure
an alert service, which will send them an alert whenever a specific traffic condition oc-
curs in a defined area. Moreover, users interacting with the M-Traffic system through
mobile phones are able to forward traffic information to other users sending SMS or
e-mail messages.
Fig.2. Mobile phone interface.
89

3.1 Image Processor
The objective of this module is to gather and process the images captured by traffic
cameras in order to extract quantitative data and visual data in different formats.
3.2 Information System
The M-Traffic information system stores, manages and provides the Traffic Status Gen-
erator with all the data related with the traffic and the users, such as: vehicle count, av-
erage speed; accident related data, weather conditions, data collect from video cameras
and magnetic sensors, rules, heuristics and simulation data used to assess and predict
the traffic conditions, users’ personal data, users’ preferences and alert configuration
data.
Traffic data is stored in an incremental approach, allowing the prediction of future
traffic conditions based on the analysis of previous historical data, as well as weather
conditions or the occurrence of events that affect the traffic normal flow.
3.3 Traffic Status Generator
The Traffic Status Generator component keeps an updated data structure that can be
seen as a real time snapshot of the traffic status in the whole area covered by the system.
It makes the connection between the different modules composing M-Traffic system
and fulfils the information requests. This module should:
– Periodically, processes traffic data continuously received from the various system
inputs and generates statistical information regarding the traffic conditions, includ-
ing average traffic or average speed for a specific road on a certain day or hour.
– Maintain an updated data structure containing the current traffic status information.
– Manages the alert system, by periodically verifying users options, compares it with
the current traffic conditions and if necessary sends an alert message. These alerts
are send via Content builder.
– Manages the interaction between the different system modules.
3.4 Content Builder
This module should support the access to M-Traffic by different mobile devices with
distinct characteristics and information processing power.
The ever increasing diversity of mobile devices with diverse technical and func-
tional capabilities (CPU power, display size, interaction paradigms) brings further com-
plications concerning the adaptation and dissemination of content. Content builder is
designed to be easily extended to support the use of M-Traffic by additional mobile de-
vices and to provide formatted content including: images generated from camera cap-
tured images overlaid with traffic data, using colour and text; colour or black and white
synthetic images that sketch the traffic conditions in a defined area; real-time video
captured by traffic cameras; Textual structured information formatted according to the
characteristics of the requesting device.
90
3.5 InterfaceMapS - Traffic Simulator
This module establishes the interface betwee the Traffic Status Generator and the Geo-
graphic Information System. It includes the routing algorithm that runs over the graph
representing the street network as a submodule. In order to reply to user requests, the
routing service must apply a minimum path algorithm as Djiskstra over the graph repre-
senting the Lisbon street’s network. However, not every street has sensors (either image
or ground sensors). Thus, in order to find minimum time routes it is necessary to esti-
mate the delay in each street from a simulation model.
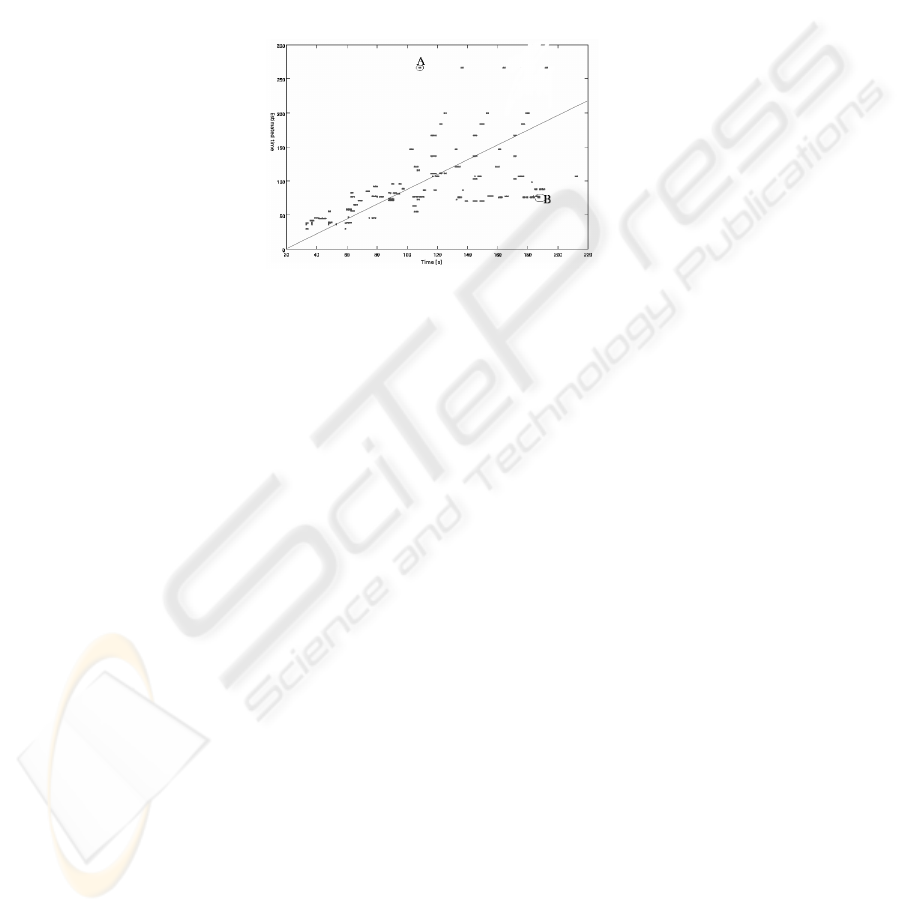
Fig.3. Estimated vehicle delay.
Simulation Model. The model presented in this work has two regimes: a car-following
regime and a free-flow regime. These regimes are according to driver behaviours that
try to follow the leading vehicle with a safety space headway, if it is close enough or else
will drive at a desired speed that depends on the street and the driver. From kinematics
laws a car following accelaration dynamic model is defined taking into account: the
characteristic street speed, vehicle characteristic parameter, driver perception pure de-
lay, and the driver eagerness to follow the preceding car. In this work the effect of traffic
lights is taken into account. Whenever the vehicle is in the traffic light influence area it
responds to the red lights generating a negative acceleration that is calculated such that
the vehicle stops under the traffic light position. The simulator is implemented in java.
The simulator outputs the position of each vehicle for every sampling time as well as
sensor signals that give vehicle counts and average speed at a predefined time interval.
These sensor signals correspond to those given by the Lisbon’s Traffic Management
system.
Simulation Results. In this section some results are presented. The parameters used
in the simulations presented bellow result from a calibration made with just one driver-
vehicle system and does not include a parameter variability study. Simulations were
performed using Euler integration method with a fixed integration time of 1 second.
Since there are some streets with sensors that count vehicles and measure speed, it is
a natural choice to use the speed information in order to estimate street transit delay.
Fig. 3 shows the result of estimated delay versus the simulation delay for a wide set
of conditions (short and long queues). Though there is a correlation between estimated
delay and simulation, there are some results quite far from the ideal linear correlation.
91

Results indicated in A and B represent extreme situations with very long and very short
queues near a traffic light. The results indicate an alternative estimate should be used,
including other information besides the average speed such as vehicle count in a fixed
period of time.
4 Conclusions and Future Work
This paper presents a multiplatform Mobile Traffic information and monitoring system,
which provides real time traffic information. M-Traffic service ubiquitously provides
users with traffic information regarding their needs and preferences, according to an
alert system. This paper describes the system modular architecture. A simulation model
is presented and some results are shown. One of the services in this system is a rout-
ing service based on a minimum path criterium. In order to change this criterium to
minimum time a delay estimate precision was studied against sensor location.
Acknowledgements
The authors gratefully acknowledge the contribution of National Research Organisa-
tion, ADI - Ag
ˆ
encia de Inovac¸
˜
ao, project M-traffic- POSI Action 1.3 Consorcium Re-
search
References
1. Beymer, D., McLauchlan, P., Coifman, B. and Malik, J., ”A Real-time Computer Vision
System for Measuring Traffic Parameters”, Proceedings of Conference on Computer Vision
and Pattern Recognition (CVPR’97), June 17-19, 1997, Puerto Rico, pp. 495-501.
2. Ben-Akiva, M., Bierlaire, M., Koutsopoulos, H. N. and Mishalani., R. G. (1996). ”DynaMIT:
Dynamic network assignment for the management of information to travellers”, In Proceed-
ings of the 4th Meeting of the EURO Working Group on Transportation, September 9-11,
1996, Newcastle, UK.
3. Ben-Akiva, M., Bierlaire, M., Bottom, J., Koutsopoulos, H.N., and Mishalani, R.G., ”Devel-
opment of a route guidance generation system for real-time application”, Proceedings of the
8th International Federation of Automatic Control Symposium on Transportation Systems,
Chania, Greece, 1997.
4. M. C. Marques, R. N. Silva, ”Road Traffic Simulation for Control Methods Development”,
Controlo 2004, Sixth Portuguese Conference on Automatic Control, Faro, Portugal, 2004.
5. Kai Nagel and M. Schreckenberg, ”A cellular automaton model for freeway traffic”, Journal
de Physique I France, 12, 2221, 1992
92
