
FLOOR CONTROL IN COMPLEX SYNCHRONOUS CSCL
ENVIRONMENTS
Jacques Lonchamp
LORIA, Nancy University, Campus Scientifique, BP 239, 54506 Vandoeuvre-les-Nancy Cedex, France
Keywords: CSCL, collaborative learning, floor control, turn management.
Abstract: Complex synchronous CSCL environments are dual space environments providing a task space where users
“do things” through a set of collaborative tools and a communication space where users “talk of what they
do”. The most recent systems provide several tools in each space. In such complex dual space environments,
the definition and role of floor-control (FC) has to be clarified. FC can be associated to different granularity
levels: environment, space, artefact, component or attribute. If FC is associated to the tool or space level, the
coexistence of different FC policies has to be considered. This paper discusses FC in complex synchronous
CSCL environments and describes the particular approach implemented in Omega+ generic framework.
1 INTRODUCTION
Complex synchronous CSCL environments are dual
space environments providing a task space where
users “do things” through a set of collaborative tools
and a communication space where users “talk of
what they do”. This combination of communication
and shared work artefacts is an important
requirement for effective collaborative learning
(Suthers and Xu, 2002).
Early dual space CSCL systems only provided a
chat tool in the communication space and some
artefact editor in the task space. It was the case, for
instance, of C-Chene (Baker and Lund, 1996),
EPSILON (Soller et al., 1999), Digalo (Glassner and
Schwarz, 2004), Coler (Constantino-Gonzáles and
Suthers, 2001) and Cosar (Jaspers et al., 2001). In
most of these environments (C-Chene, Digalo,
Coler, Cosar), a floor control (FC) mechanism was
associated to the task editor. The rationale was either
to ensure exclusive access to the shared artefact
(concurrency control), or to disallow anarchic
interaction (turn management). In a few other
proposals, all users were allowed to use the editor at
any moment (“free floor policy”), and social
protocols were expected to avoid inconsistent usages
through mutual awareness information (e.g., visual
feedback indicating which objects are in use). The
FC approach has often been criticized from a
theoretical point of view, when compared to more
flexible techniques for consistency control, such as
serializability, optimistic locking, operational
transformation (Yang and Li, 2005). At the opposite,
a number of field studies comparing argumentative
activities with and without FC have found that FC
increases the efficiency with regard to the
collaborative task, thanks to better turn management
and more meaningful discussions (Glassner and
Schwartz, 2004), (McKinlay et al., 1993). The most
recent synchronous CSCL systems provide several
tools in each space. This is the case of Modelling
Spaces (Avouris et al., 2004), Algebra-Jam (Singley
et al., 2000), Cool Modes (Pinkwart, 2003) and Co-
Lab (van Joolingen et al., 2005). In such complex
dual space environments, the definition and role of
FC has to be clarified. FC can be associated to very
different granularity levels: environment, space,
tool/artefact, component of the artefact, attribute of a
component. If FC is associated to the tool or space
level, several FC policies can coexist. The
consequences of combining different FC policies
have to be carefully analyzed.
The problem of FC is discussed here in the scope
of the Omega+ effort for building a generic
synchronous CSCL framework. Omega+ applies
“model-based genericity” to the four dimensions of
collaborative learning: the situation, the interaction,
the process, and the way of monitoring individual
and group performance (Lonchamp, 2006). These
four aspects are explicitly specified in four models
(process, protocol, artefact, effect) that serve as
parameters for the generic framework which is
397
Lonchamp J. (2007).
FLOOR CONTROL IN COMPLEX SYNCHRONOUS CSCL ENVIRONMENTS.
In Proceedings of the Third International Conference on Web Information Systems and Technologies - Society, e-Business and e-Government /
e-Learning, pages 397-402
DOI: 10.5220/0001270103970402
Copyright
c
SciTePress

designed to model systems that are flexible and can
be tailored to a wide range of users, communities,
goals and contexts. Omega+ client looks like a
classical dual space system, with a communication
space and a task space. The chat in the
communication space is either a regular chat or a
protocol-driven chat. A protocol model defines
typed messages, role assignment, and message
sequencing. The process model describes the
sequential and/or parallel ordering of phases
(“rooms”) within the synchronous session. Each
phase is characterized by an interaction protocol
type, a FC policy, and a set of tools available in the
task space. Tools are either predefined editors
(collaborative text editor, whiteboard) or shared
editors for graph-based representations which are
customized by artefact models. Individual and
collective group performance representations can be
generated on the basis of the effect model. Omega+
approach of FC has to be sufficiently generic for
accommodating a large spectrum of learning
situations and sufficiently simple for allowing non
specialist model designers to well understand the
consequences of the choices specified in the process
models they create or reuse.
Section 2 introduces the problem by defining the
role of FC in complex synchronous CSCL systems,
emphasizing its importance for user-oriented reasons
and defining a set of global policies at the
environment level. Section 3 discusses how these
general ideas are implemented in Omega+.
2 THE PROBLEM
2.1 Understanding FC
Synchronous computer-mediated collaboration bears
an inherent structure resembling a discourse model
as it is known from linguistic pragmatics. A central
concept is turn-taking, which is defined as the
passing of speaker control among multiple
participants. In pragmatic turn-taking models, at
each turn a party assumes a social role such as
speaker or listener, switching control in order to
minimize pauses and maximize the conveyed
information. The concept of transition relevance
place (TRP) was introduced by Sacks et al. (1974).
At each TRP, identified by syntactical constructs,
control may eventually be switched. Duncan (1972)
has proposed a model of turn-taking for face to face
two-person conversations based on a description of
the behaviour that accompanied speaking-role
changes. Cues are actions which serve a signal’s
intent by being directly perceived and interpreted by
the other participant as an expression of that intent.
Many intuitive verbal cues (voice volume and rate)
and non-verbal cues (gestures, eye contact, facial
expressions) in face to face meetings are not valid in
a computer-mediated environment. Floor control
mechanisms are therefore introduced for facilitating
turn management.
Synchronous collaborative environments are also
concerned with how the learners’ focus of attention
relate, i.e., with mutual focus of attention. A
person’s focus of attention will correspond roughly
to selections of one or more interface elements for
immediate further processing, and such selections
change from moment to moment. Other persons
have to perceive and interpret these visual signals.
FC is also concerned with helping to achieve such
mutual focus of attention.
2.2 FC Policies
There are a surprisingly large number of different
policies for FC. Policies are rules used for making
decisions. The primary FC decisions concern how
users acquire control, how users release control, and
what happens to requests if control is not available
(Myers et al., 1999). There are four options for
control acquisition:
explicit request: for instance by pushing a button,
implicit request: by performing an input event,
such as clicking the mouse or typing,
protocol-based: for instance ‘round robin’, where
each user gets a turn in a circular order,
designation: a chair-person decides who gets
control.
The three options for releasing control are:
explicit release: the floor holder explicitly
signals being finished,
idle pre-emption: the system notices that the
floor holder is not busy and releases the control,
explicit removal: whether or not the user is
finished, the control can be explicitly removed;
for example, a moderator determines that the
user has control for too long.
Finally, there are three options of what can happen
to the requests:
immediate grant: this only works with the
explicit loss release policy,
queued: usually in first-come, first-serve order,
ignored: the request is thrown away if it cannot
be satisfied.
By combining these options, most of the existing FC
policies can be constructed: free-floor (implicit
request + explicit removal + immediate grant), pause
WEBIST 2007 - International Conference on Web Information Systems and Technologies
398
detection (implicit request + idle pre-emption +
ignored), take the floor (explicit request + explicit
removal + immediate grant), wait the floor (explicit
request + explicit release + queued), ask the floor
(explicit request + explicit release + ignored),
moderated (designation + explicit removal +
queued), etc.
2.3 Requirements
In a complex synchronous CSCL environment, FC is
mandatory for user-oriented reasons. At the contrary
of face-to-face conversations, a participant’s
attention might not be directed to a single other
participant. If parallel activities may occur in
different tools, mutual focus of attention can become
very difficult to maintain. The danger of parallel
activities from different learners is to obtain several
threads of individual work, instead of a collaborative
activity which is the fundamental objective of a
CSCL system. However, a global floor at the
environment level, ensuring the exclusive control of
the whole system, is only one of the many possible
solutions and in most cases not the optimal one. A
complex (dual space) synchronous CSCL
environment requires a small set of global policies
at the environment level, specifying who can talk
and who can act. For instance, a coarse grained form
of parallelism, between a single active participant in
the task space and several active commentators in
the communication space, can be appropriate in
many learning situations.
Each global policy can be characterized by the
number of parallel floors available in the two spaces.
Table 1 defines the five proposed global FC policies
in terms of the corresponding space policies and
illustrates each of them with a typical example. This
proposal can deal with a large spectrum of learning
situations. It is sufficiently simple for allowing non
specialist process model designers to well
understand the consequences of a given choice.
3 OMEGA+ IMPLEMENTATION
Some characteristics of Omega+ impact the
implementation of these general ideas. As explained
in the introduction, interaction models are used for
customising the chat tool in the communication
space. Interaction models allow describing complex
policies for chat control based on application-related
roles, typed messages and explicit sequencing rules.
For example, some reviewing protocol defines two
Table 1: The five global FC policies.
Global policy
Task
space
policy
Comm.
space
policy
Typical
example
Free floor Free floor Free floor Free sketching +
free commenting
Free talking-
exclusive
doing
Exclusive
control
Free floor Free commenting
+ exclusive
diagramming
Free doing-
exclusive
talking
Free floor Exclusive
control
Free sketching +
round robin
talking
Parallel floors Exclusive
control
Exclusive
control
Exclusive
diagramming +
exclusive voice
channel
Common floor Exclusive control Round robin
talking and
diagramming
roles (writer and reviewer) and three message types
(correction, supplement, comment). The rules
specify that each reviewer contributes in turn with a
correction, a supplement, or a comment. If a
correction or supplement is provided, it is the
writer’s turn, who can accept or reject the proposed
contribution. If a comment is provided, it is the next
reviewer’s turn (Pfister and Mühlpfordt, 2002). This
kind of “protocol model-driven policy” may concern
not only the communication space but also the task
space, by using the communication floor as a
common floor for the whole environment.
Omega+ provides an application-independent
‘room operator’ role. A participant playing this role
has extended rights for dynamically changing most
of the constraints that apply in the room (e.g.,
change the current interaction protocol, kick off or
skip a participant, modify the ongoing process
model) In Omega+ implementation, a default FC
policy is proposed which achieves exclusive control
at the space level. The proposed default policy is
what was called above wait the floor, characterized
by explicit request, explicit release and FIFO
queuing options. This default policy may be
dynamically customised by room operators. The
definition of maximum idle time duration turns the
default policy into a pre-emptive one. The capability
to pass the floor to a specific participant turns the
default policy into a moderated one. By this way,
many different policies can be derived from the
default policy. Apart the implicit request option
(problematic when there are several tools), all the
other options for control acquisition (explicit
request, protocol-based, designation) and control
FLOOR CONTROL IN COMPLEX SYNCHRONOUS CSCL ENVIRONMENTS
399

release (explicit release, idle pre-emption, explicit
removal) become available as derivatives of the
default policy or protocol model-driven policies.
Table 2 summarizes Omega+ implementation of the
global policies proposed in the previous section.
Table 2: Omega+ implementation.
Global policy Task space
policy
Communication
space policy
Free floor Free floor Free floor
Free talking-
exclusive doing
Wait the floor
(customisable)
Free floor
Free doing-
exclusive talking
Free floor Wait the floor
(customisable) or
protocol-driven
Parallel floors Wait the floor
(customisable)
Wait the floor
(customisable) or
protocol-driven
Common floor Wait the floor (customisable) or
protocol-driven
3.1 The User Interface
The background colour of all interactive areas shows
if the user has the floor: a white area is ready to
accept contributions from the user (such as typing,
creating or modifying graphical elements) whereas a
coloured (light blue) background means that
interaction is impossible. The only exception
concerns interacting through the annotation
mechanism provided by Omega+: graphical
pointers, “sticky notes”, and “sticky annotated
snapshot” are independent of the FC mechanism
providing unconstrained means of interaction to the
users (Lonchamp, 2007).
In the case of the default wait the floor policy,
explicit control request and release are performed
through dedicated buttons. When the “ask floor”
button is pressed, it becomes greyed and its label
changes to “waiting…” until the floor is received. At
this time, the “release floor” button stops to be
greyed and the background of the tool changes to
white. With the “queue?” button, it is possible to
know the FIFO queue state during the waiting state.
Menu options allow a room operator to change the
maximum idle time duration and to give the floor to
a specific participant.
3.2 A Process Model Example
A process model, within a “structured room”,
defines a sequence of phase types. We differentiate
between regular and split phases. In a regular phase
the whole group of participants works in the same
room. A split phase is a structured phase comprising
a small set of sub phases running in parallel. The
group of participants is divided into sub groups
working in different sub rooms. Room Operators
participate to all sub rooms. All sub phases of a split
phase start and terminate simultaneously.
Each phase type (regular phase or sub phase) can
be characterized by a name, a type (regular or split),
an informal description, an interaction protocol type
(either predefined – moderated, round robin, single
contribution, unique contributor – or application-
specific), a global FC policy (see Table 2), and a set
of available shared tools (at most three). Each tool
can be characterized by a name, a type (text editor,
whiteboard, artefact editor), a read-only boolean, the
path of the input file automatically loaded when the
phase starts and the path of the output file
automatically created when the phase terminates.
Omega+ favours visual modelling and model
reuse. Collaborative model editing sessions use
Omega+ generic editor customized for editing
process models.
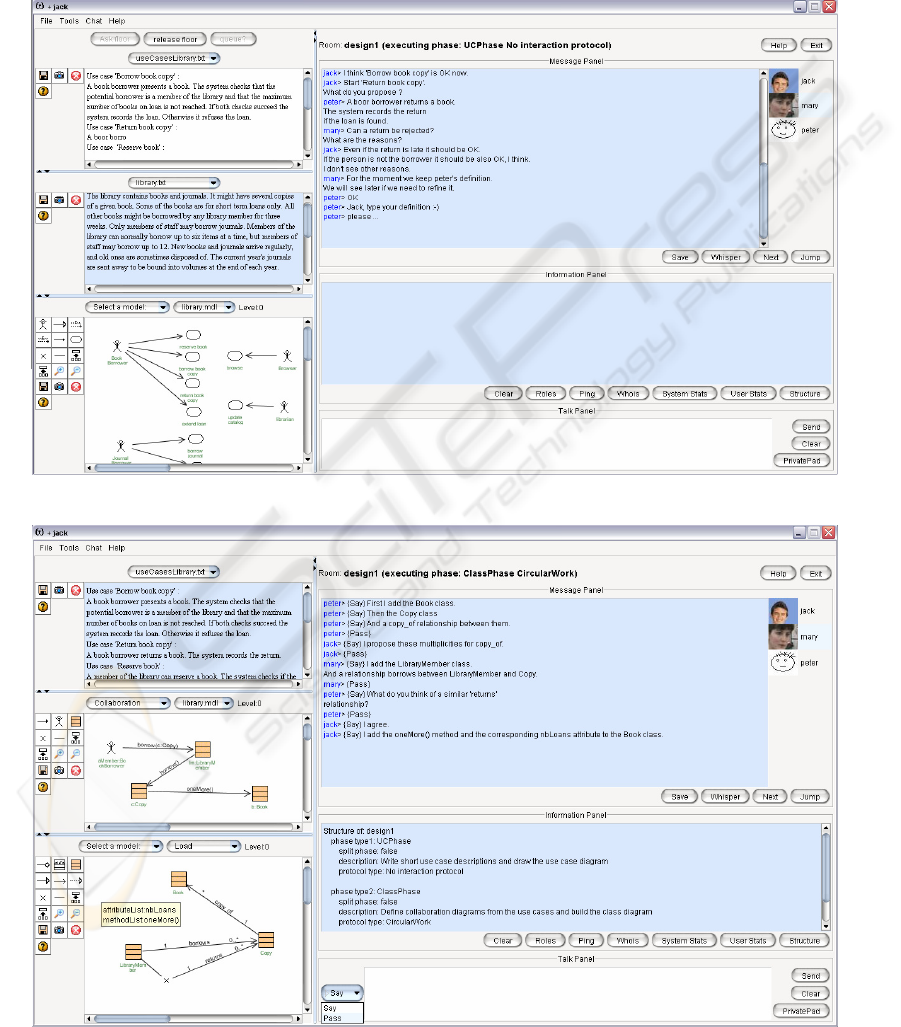
The OODesign process model has been created
for an object-oriented design course. Small groups
of three or four students receive the wording of a
situation (see the read-only textboard in the middle
part of the task space on the left of Figure 1) and
have to build an UML class diagram. In the first
phase, they are asked to specify some use cases with
short textual descriptions (with the textboard in the
upper part of the task space) and to draw the overall
use case diagram (with the diagrammer in the lower
part of the task space). This phase requires free
talking like during a brainstorming. However, when
producing the artefacts some coordination is
required. Therefore, the free talking and exclusive
doing FC policy has been selected. Figure 1 shows
Jack’s client who has the floor for doing (see the
‘release floor’ button on the top left and white
backgrounds for all tools excepted the read-only
textboard). All users (including Jack) can
communicate with the regular chat tool (we present
here simplified dialogues rewritten in English
because the original course was given in French).
The second phase is the core of the design
process. Students can see their use case descriptions
in a read-only textboard (in the upper part of the task
space in Figure 2). They translate them into
collaboration diagrams (with the diagrammer in the
middle part) while introducing new classes in the
class diagram (with the diagrammer in the lower
part). For ensuring both disciplined work and
equality of participation among the students, the
WEBIST 2007 - International Conference on Web Information Systems and Technologies
400
‘CircularWork’ protocol is used as a common floor
at the environment level. Each student in turn takes
control of the whole environment. The predefined
‘round robin’ protocol has not been chosen because
it implies that the floor moves to the next learner
after each utterance. A specific protocol has been
designed which allows sending several messages
before passing explicitly the floor to the next learner.
Figure 3 shows Omega+ generic editor when the
user has selected the ‘Protocol Model’ type and the
‘CircularWork’ protocol model. Such a protocol
model includes a set of roles, a set of typed
messages (utterances), and a set adjacency pairs
(Clark and Schaefer, 1989) saying that if a user
playing role A produces a message of type X then
any user (or the next one, the same one, etc.) playing
Figure 2: The protocol model-driven second phase.
Figure 1: Jack’s client during the first phase.
FLOOR CONTROL IN COMPLEX SYNCHRONOUS CSCL ENVIRONMENTS
401
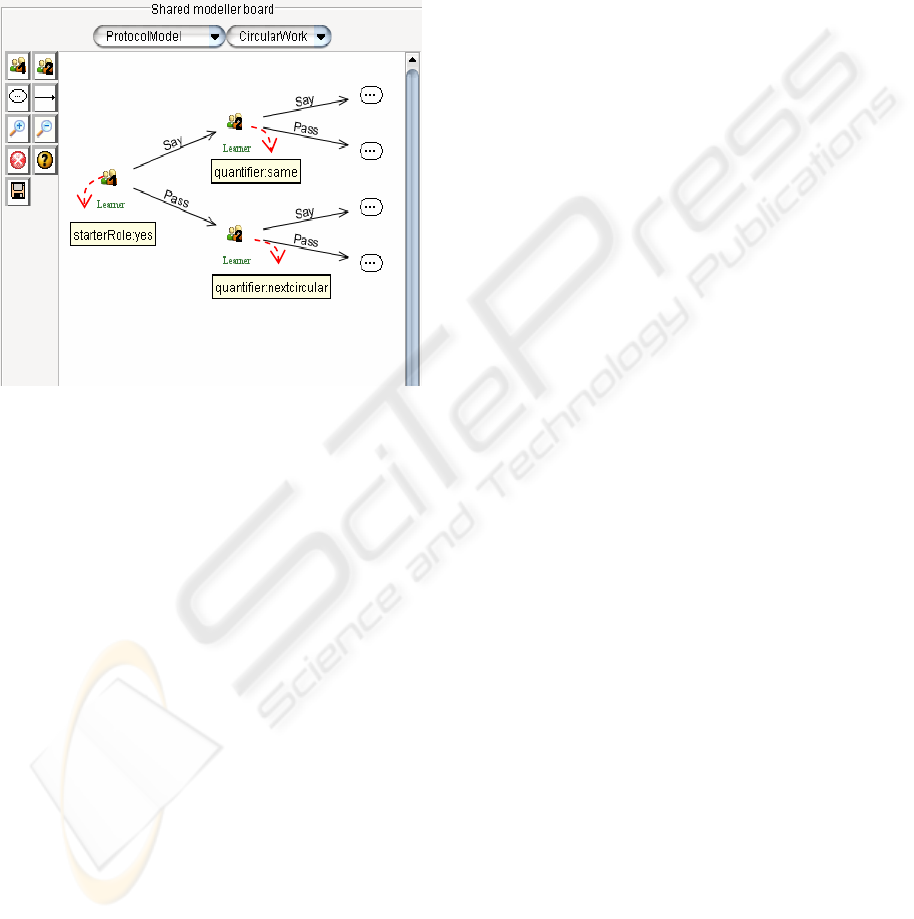
role B can continue with a message of type Y. At
each moment, a participant using the protocol-driven
chat can only select through a combo box a type of
message in accordance with his(her) role and the
protocol rules (‘Say’ or ‘Pass’ for the floor holder,
no message for the other students – see Fig. 2). The
chat history also reflects the use of this protocol. At
every moment, the room operator can switch to
another FC policy like wait the floor or free floor.
4 CONCLUSION
Complex synchronous CSCL environments require a
set of well defined FC policies at the environment
level, specifying who can talk and who can act.
This paper proposes five global FC policies
which should satisfy a large spectrum of learning
situations. Omega+ implementation takes into
account the existence of ‘protocol model-based’
policies for controlling the chat tool which have to
be extended to the task space and the strong
requirement for dynamic policy evolution by users
playing the room operator role.
REFERENCES
Avouris, N., Komis, V., Margaritis, M., Fidas, C., 2004.
Modelling Space: A tool for synchronous
collaborative problem solving. In Proc. ED-MEDIA’
04, AACE Press, 381-386.
Baker, M., Lund, K., 1996. Flexibly structuring the
interaction in a CSCL environment. In Proc. European
Conf. on Artificial Intelligence and Education, Colibri
Ed., 401-407.
Constantino-González, M., Suthers, D., 2002. Coaching
Collaboration in a Computer-Mediated Learning
Environment. In Proc.CSCL’05, Lawrence Erlbaum
Associates, 583-586.
Duncan, S., 1972. Some Signals and Rules for Taking
Speaking Turns in Conversations. Journal of
Personality and Social Psychology 23, 283-292.
Glassner, A., Schwarz, B, 2005. The Role of Floor Control
and of Ontology in Argumentative Activities with
Discussion-Based Tools. In Proc. CSCL’05, Lawrence
Erlbaum Associates, 170-179.
Jaspers, J., Erkens, G., Kanselaar, G., 2001. COSAR:
Collaborative writing of argumentative texts. In Proc.
ICALT’01, IEEE Computer Society Press, 269-272.
Lonchamp, J., 2006. Supporting synchronous
collaborative learning: a generic, multi-dimensional
model. Int. Journal of CSCL, 1 (2), 247-276.
Lonchamp, J., 2007. Linking Conversations and Task
Objects in Synchronous CSCL Environments,
WEBIST 2007.
McKinlay, A., Arnott, J., Procter, R., Masting, O.,
Woodburn, R., 1993. A Study of Turn-Taking in a
Computer-Supported Group Task. In Proc. HCI '93,
Cambridge University Press, 383-394.
Myers, B.A., Chuang, Y.S.A., Tjandra, M., Chen, M.C.,
Lee, C.K., 2000. Floor Control in a Highly
Collaborative Co-Located Task. http://www.cs.cmu.
edu/~pebbles/papers/pebblesfloorcontrol.pdf
Pfister, H.-R., Mühlpfordt, M., 2002. Supporting discourse
in a synchronous learning environment: The learning
protocol approach. In Proc.CSCL’02, Lawrence
Erlbaum Associates, 581-589.
Pinkwart, N., 2003. A Plug-In Architecture for Graph
Based Collaborative Modelling Systems. In Proc.
AIED’03, IOS Press, 535-536.
Sacks, H., Schegloff, E. A., Jefferson, G., 1974. A
Simplest Semantics for the Organization of Turn
Taking for Conversation. Language, 50 (4).
Singley, M., Singh, M., Fairweather, P., Farrell, R.,
Swerling, S., 2000. Algebra jam: supporting teamwork
and managing roles in a collaborative learning
environment. In Proc.CSCW’00, ACM Press,145-154.
Soller, A., Linton, F., Goodman, B., Lesgold, A., 1999.
Toward Intelligent Analysis and Support of
Collaborative Learning Interaction. In Proc. AIED’99,
IOS Press, 75-82.
Suthers, D. Xu, J., 2002. Kukakuka: An Online
Environment for Artifact-Centered Discourse. In Proc.
11th WWW Conference, ACM Press, 472-480.
van Joolingen, W., de Jong, T., Lazonder, A., Savelsbergh,
E., Manlove, S., 2005. Co-Lab: research and
development of an online learning environment for
collaborative scientific discovery learning. Computers
in Human Behavior, 21, 671 –688.
Yang, Y.,Li, D., 2005. Supporting Adaptable Consistency
Control in Structured Collaborative Workspaces.
Computer Supported Cooperative Work, 14, 469–503.
Figure 3: The ‘CircularWork’ protocol model.
WEBIST 2007 - International Conference on Web Information Systems and Technologies
402
