
ADDRESSING COMPLEXITY ISSUES IN A REAL-TIME PARTICLE
FILTER FOR ROBOT LOCALIZATION
Dario Lodi Rizzini, Francesco Monica, Stefano Caselli
Dipartimento di Ingegneria dell’Informazione, Universit
`
a di Parma
Viale G. P. Usberti, 181/A, 43100 Parma, Italy
Monica Reggiani
Dipartimento di Informatica, Universit
`
a di Verona
Ca’ Vignal 2, Strada Le Grazie 15, 37134 Verona, Italy
Keywords:
Robot Localization, Real-Time, Particle Filters.
Abstract:
Exploiting a particle filter for robot localization requires expensive filter computations to be performed at
the rate of incoming sensor data. These high computational requirements prevent exploitation of advanced
localization techniques in many robot navigation settings. The Real-Time Particle Filter (RTPF) provides a
tradeoff between sensor management and filter performance by adopting a mixture representation for the set
of samples. In this paper, we propose two main improvements in the design of a RTPF for robot localization.
First, we describe a novel solution for computing mixture parameters relying on the notion of effective sample
size. Second, we illustrate a library for RTPF design based on generic programming and providing both
flexibility in the customization of RTPF modules and efficiency in filter computation. In the paper, we also
report results comparing the localization performance of the proposed extension and of the original RTPF
algorithm.
1 INTRODUCTION
Robot localization is the problem of estimating robot
coordinates with respect to an external reference
frame. In the common formulation of the localization
problem, the robot is given a map of its environment,
and to localize itself relative to this map it needs to
consult its sensor data. A particularly effective ap-
proach to solve this problem is the probabilistic one,
due to the uncertainty affecting sensor data and move-
ment execution. For this reason, bayesian filtering has
become the prevailing paradigm in recent works on
localization (Elinas and Little, 2005; Sridharan et al.,
2005).
A stochastic estimator provides a result expressed
in the form of a probability density function (PDF)
represented like a continuous function by Gaussian
filters (Kalman Filter, EKF) (Leonard and Durrant-
Whyte, 1991; Arras et al., 2002) or a discrete decom-
position of the state posterior by nonparametric fil-
ters. The main nonparametric algorithm is called Par-
ticle Filter (Fox et al., 1999) and relies on importance
sampling (Doucet et al., 2001). With importance sam-
pling, the probability density of the robot pose is ap-
proximated by a set of samples drawn from a proposal
distribution, and an importance weight measures the
distance of each sample from the correct estimation.
The nonparametric approach has the advantage
of providing a better approximation of the posterior
when a parametric model does not exist or changes
during iteration, e.g. in initialization or when environ-
ment symmetries determine a multi-modal PDF. Even
if techniques like Multi-Hypothesis Tracking (Arras
et al., 2002) attempt to manage multi-modal distribu-
tions, particle filters are more efficient and can rep-
resent all kinds of PDFs, including uniform distribu-
tions. Moreover, particle filters avoid linearizations
that can lead to poor performance and divergence of
the filter for highly nonlinear problems.
Unfortunately, particle filters suffer from compu-
tational complexity due to the large number of dis-
crete samples of the posterior: for each sample a
pose update, a correction and a resample step are per-
formed. Since localization can be performed slowly
with respect to the usual movement and tasks of the
robot, it would be conceivable to perform localiza-
355
Lodi Rizzini D., Monica F., Caselli S. and Reggiani M. (2007).
ADDRESSING COMPLEXITY ISSUES IN A REAL-TIME PARTICLE FILTER FOR ROBOT LOCALIZATION.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 355-362
DOI: 10.5220/0001617503550362
Copyright
c
SciTePress
tion over a large time interval. Therefore, there have
been attempts to adapt the number of samples (Fox,
2003). However, during an excessive time interval un-
certainty increases and many useful observations are
dropped; a proper interval to complete a particle filter
iteration should be approximately equal to the rate of
incoming data. A trade-off must therefore be reached
between time constraints imposed by the need of col-
lecting sensor data incoming with a given rate and the
number of samples determining localization perfor-
mance.
The Real-Time Particle Filter (RTPF) (Kwok
et al., 2004) is a variant of a standard particle filter
addressing this problem. This algorithm relies on the
decomposition of the posterior by partitioning the set
of samples in smaller subsets computed taking into
account the sensor data received in different time in-
tervals. By choosing the proper size for partitions, a
particle filter iteration can be performed aligned with
the sensor acquisition cycle.
While RTPF represents a remarkable step toward
a viable particle filter-based localizer, there are a few
issues to be addressed in developing an effective im-
plementation. RTPF convergence is prone to some
numerical instability in the computation of important
parameters of the algorithm, namely the coefficients
of the mixture constituting the posterior. Further-
more, even adopting RTPF as the basic architecture,
the design of a flexible and customizable particle fil-
ter remains a challenging task. For example, life cy-
cle of samples extends beyond a single iteration and
covers an estimation windows in which mixture pos-
terior computation is completed. This extended life
cycle of samples impacts over software design. More-
over, RTPF addresses observations management and
derived constraints. A good implementation should
be adaptable to a variety of sensors.
This paper proposes improvements in both the al-
gorithmic solution and the implementation of RTPF.
In section 2, a novel approach in the computation
of mixture weights based on the effective number of
samples is proposed. This approach simplifies RTPF
and tries to avoid spurious numeric convergence of
gradient descent methods. In section 3, a localiza-
tion library implementing a highly configurable par-
ticle filter localizer is described. The library takes
care of efficient life cycle of samples and control data,
which is different in RTPF and standard particle fil-
ter, and supports multiple motion and sensor mod-
els. This flexibility is achieved by applying generic
programming techniques and a policy pattern. More-
over, differing from other particle filter implementa-
tions (e.g., CARMEN (Montemerlo et al., 2003)), the
library is independent from specific control frame-
works and toolkits. In section 4, simulation and ex-
perimental results are reported and compared with the
original RTPF performance. These results confirm the
effectiveness and viability of the proposed algorithm
and its implementation.
2 ADDRESSING ALGORITHMIC
COMPLEXITY
In particle filters, updating the particles used to rep-
resent the probability density function (potentially a
large number) usually requires a time which is a mul-
tiple of the cycle of sensor information arrival. For ex-
ample, range scanners return hundreds of values per
scan, at a rate of several scans per second; vision sen-
sors often require advanced algorithms to identify vi-
sual landmarks (Se et al., 2002; Sridharan et al., 2005)
draining computational resources from the process of
localization.
Naive approaches, yet often adopted, include dis-
carding observations arriving during the update of the
sample set, aggregating multiple observations into a
single one, and halting the generation of new samples
upon a new observation arrival (Kwok et al., 2004).
These approaches can affect filter convergence, as ei-
ther they loose valuable sensor information, or they
result in inefficient choices in algorithm parameters.
An advanced approach dealing with such situa-
tions is the Real-Time Particle Filters (RTPF), pro-
posed in (Kwok et al., 2004), which will be briefly
described in the following.
2.1 Real-time Particle Filter
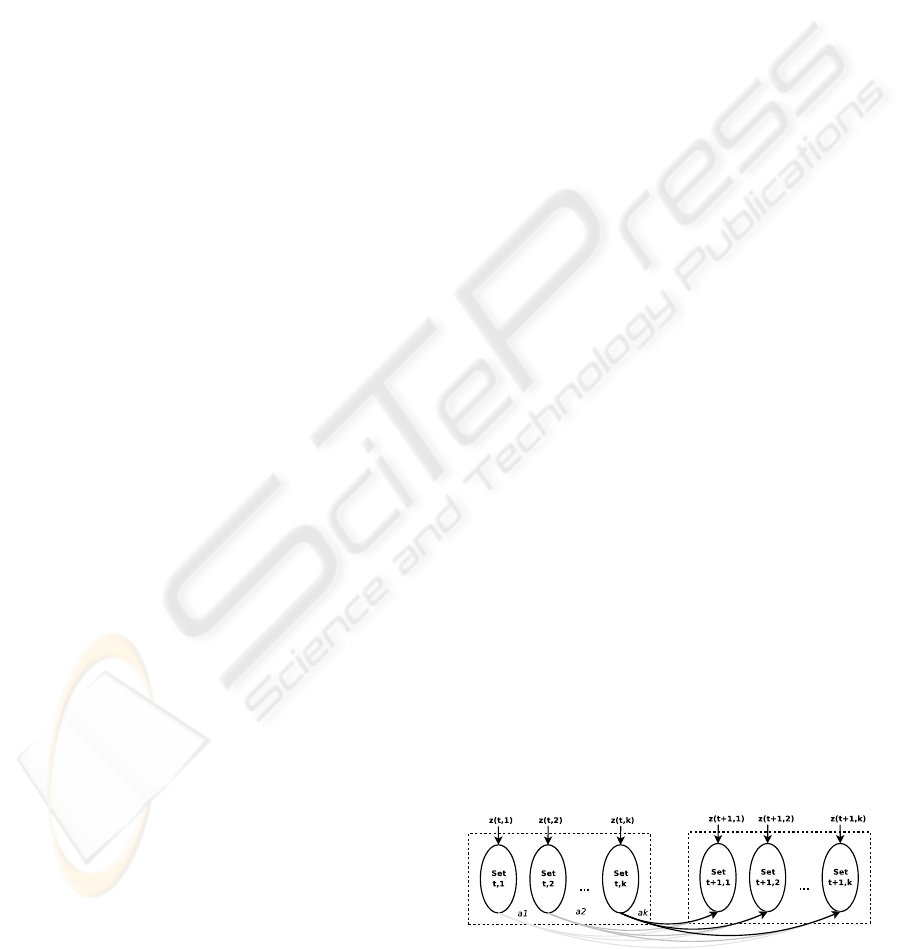
Assume that the system received k observations
within an estimation window, i.e. the time required
to update the particles. The key idea of the Real-Time
Particle Filter is to distribute the samples in sets, each
one associated with one of the k observations. The
distribution representing the system state within an
estimation window will be defined as a mixture of the
k sample sets as shown in Figure 1. At the end of each
Figure 1: RTPF operation: samples are distributed in sets,
associated with the observations. The distribution is a mix-
ture of the sample sets based on weights α
i
(shown as a
i
in
figure).
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
356

estimation window, the weights of the mixture belief
are determined by RTPF based on the associated ob-
servations in order to minimize the approximation er-
ror relative to the optimal filter process. The optimal
belief could be obtained with enough computational
resource by computing the whole set of samples for
each observation. Formally:
Bel
opt
(x
t
k
) ∝
. . .
k
∏
i=1
p(z
t
i
|x
t
i
) · p(x
t
i
|x
t
i−1
, u
t
i−1
)
·Bel(x
t
0
)dx
t
0
···dx
t
k−1
(1)
where Bel(x
t
0
) is the belief generated in the previous
estimation window, and z
t
i
, u
t
i
, x
t
i
are, respectively,
the observation, the control information, and the state
for the i−th interval.
Within the RTPF framework, the belief for the i−
th set can be expressed, similarly, as:
Bel
i
(x
t
k
) ∝
. . . p(z
t
i
|x
t
i
) ·
k
∏
j=1
p(x
t
j
|x
t
j−1
, u
t
j−1
) · Bel(x
t
0
)dx
t
0
. . . dx
t
k−1
(2)
containing only observation-free trajectories, since
the only feedback is based on the observation z
t
i
, sen-
sor data available at time t
i
.
The weighted sum of the k believes belonging to
an estimation windows results in an approximation of
the optimal belief:
Bel
mix
(x
t
k
|α) ∝
k
∑
i=1
α
i
Bel
i
(x
t
k
) (3)
An open problem is how to define the opti-
mal mixture weights minimizing the difference be-
tween the Bel
opt
(x
t
k
) and Bel
mix
(x
t
k
|α). In (Kwok
et al., 2004), the authors propose to minimize
their Kullback-Leibler distance (KLD). This mea-
sure of the difference between probability distribu-
tions is largely used in information theory (Cover and
Thomas, 1991) and can be expressed as:
J(α) =
Bel
mix
(x
t
k
|α)log
Bel
mix
(x
t
k
|α)
Bel
opt
(x
t
k
)
dx
t
k
(4)
To optimize the weights of mixture approxima-
tion, a gradient descent method is proposed in (Kwok
et al., 2004). Since gradient computation is not pos-
sible without knowing the optimal belief, which re-
quires the integration of all observations, the gradient
is obtained by Monte Carlo approximation: believes
Bel
i
share the same trajectories over the estimation
windows, so we can use the weights to evaluate both
Bel
i
(each weight corresponds to an observation) and
Bel
opt
(the weight of a trajectory is the product of the
weights associated to this trajectory in each partition).
Hence, the gradient is given by the following formula:
∂J
∂α
i
≃ 1+ Bel
i
log
∑
k
i=1
α
i
Bel
i
Bel
opt
(5)
where Bel
i
is substituted by the sum of the weights
of partition set i − th and Bel
opt
by the sum of the
weights of each trajectory.
Unfortunately, (5) suffers from a bias problem,
which (Kwok et al., 2004) solve by clustering samples
and computing separately the contribution of each
cluster to the gradient (5). In the next section, an al-
ternative solution is proposed.
2.2 Alternative Computation of Mixture
Weights
This section proposes an alternative criterion to com-
pute the values of the weights for the mixture belief.
Instead of trying to reduce the Kullback-Leibler di-
vergence, our approach focuses on evaluating the be-
lieves by synthetic values depending on the sample
weights of each partition. The concrete approxima-
tion given by (Kwok et al., 2004) for the gradient of
KL-divergence is a function of weights.
Real-time particle filter prior distribution is the re-
sult of two main steps: resampling of samples and
propagation of trajectories along the estimation win-
dow. The effect of resampling is the concentration of
previous estimation window samples in a unique dis-
tribution carrying information from each observation.
Conversely, the trajectories update given by odometry
and observation spreads the particles on partition sets.
Our attempt is to build synthetic values for each
element of the resampled distribution and of the par-
tition trajectory; this could be done using weights. Let
w
ij
be the weight of the i −th sample (or trajectory)
of the j − th partition set. Then the weight partition
matrix is given by
W =
w
11
... w
1k
... ...
w
N
p
1
... w
N
p
k
(6)
The weights on a row of this matrix trace the history
of a trajectory on the estimation window; a group of
values along a column depicts a partition handling
sensor data in a given time. Resampling and trajec-
tory propagation steps can be shaped using matrix W
and mixture weights α.
• Resampling. The effect of resampling is the con-
centration of each trajectory in a unique sample
whose weight is the weighted mean of the weights
ADDRESSING COMPLEXITY ISSUES IN A REAL-TIME PARTICLE FILTER FOR ROBOT LOCALIZATION
357

of the trajectory. In formula, the vector of trajec-
tory weights is given by t = W · α.
• Propagation. Projecting a sample along a trajec-
tory is equivalent to the computation of the weight
of the sample (i.e., the posterior) for each set given
the proper sensor information. Again, matrix W
gives an estimation of the weight. Trajectories
projection can thus be done with a simple matrix
product
ˆ
α = W
T
·t = W
T
W · α (7)
Vector
ˆ
α is a measure of the relative amount of
importance of each partition set after resampling
and propagation depending on the choice of coef-
ficient α. Hence,
ˆ
α is the new coefficient vector
for the new mixture of believes.
Some remarks can be made about the matrix V =
W
T
W in (7). First, since we assume w
ij
> 0, V is
a symmetric and positive definite matrix. Moreover,
each element j on the main diagonal is the inverse of
the effective sample size (see (Liu, 1996)) of set j
n
ef f
j
=
1
∑
N
p
i=1
w
2
ij
(8)
The effective sample size is a measure of the effi-
ciency of the importance sampling on each of the par-
tition sets. Therefore, the off-diagonal elements of V
correspond to a sort of importance covariances among
two partition sets. Thus we will refer to this matrix as
weights matrix.
Hence, a criterion to compute the mixture weights
consists of achieving a balance in the mixture forcing
ˆ
α in (7) to be equal to α except for scale. The vector
is thus obtained by searching an eigenvector of matrix
V
V α = λ I α (9)
The eigenvector can be computed using the power
method or the inverse power method. This criterion
can be interpreted as an effort to balance the effective
number of samples keeping the proportion among dif-
ferent partition sets.
3 ADDRESSING SOFTWARE
COMPLEXITY
While the choice of the algorithm is a key step, in-
tegration of a localization subsystem in a real mobile
robot requires a number of practical issues and trade-
offs to be addressed. Real-time execution is the re-
sult of different aspects like communication and inte-
gration of the localizer with the robot control archi-
tecture, careful analysis in object creation/destruction
cycles, and tradeoffs between abstraction level man-
agement and efficiency.
This section describes a library designed to ef-
ficiently support the implementation of particle fil-
ter localization algorithms, and specifically of RTPF.
The library aims at providing an efficient yet open in-
frastructure allowing users to take advantage of the
provided genericity to integrate their own algorithms.
The library has been designed to be easily exploited
in different control systems for autonomous mobile
robots. In a functional layer, or controller, with the ba-
sic computational threads for robot action and percep-
tion, the localization task can be simply configured as
a computational demanding, low priority thread.
3.1 Design of the Library
Advanced localization algorithms like RTPF address
restrictions on real-time execution of localization due
to limited computational resources. However, strictly
speaking, real-time execution relies on the scheduling
and communication capabilities of the robot control
system which hosts the localizer. A localization sub-
system should therefore be properly integrated in the
control architecture. Nonetheless, localizer indepen-
dence from the underlying low level control layer is
a highly desirable property for a localization library.
The adaptable aspects of the localization library are
the data format and the models of the information pro-
vided by the physical devices of a mobile robots.
The functional analysis of the localization prob-
lem led to the identification of four main components:
the localizer, the dynamic model of the system, the
sensor data model, and the map. Each of these com-
ponents is implemented by a class, which provides a
general interface to handle prediction, correction and
resampling phases of particle filters. However, there
are different ways of modelling details like sensor and
motion uncertainty, data formats of system state, con-
trol commands and observations, or implementation-
specific like map storage and access. In our library,
classes
Localizer
,
SystemModel
,
SensorModel
and
LocalizeMap
consist of a general interface which can
be adapted.
The strategy pattern (Gamma et al., 1995) is
the well-known design solution for decoupling algo-
rithms from system architecture: with this pattern, al-
gorithms can be modified and integrated in the appli-
cation without modifying the internal code. Thus, us-
ing external abstract strategy classes for each change-
able aspect of the localization subsystem, adaptation
to the robotic platform hosting the localizer can be
obtained. While this implementation avoids the hard-
wiring of user’s choices inside the localizer code, it
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
358

causes inefficiency due to the abstraction levels intro-
duced to support the polymorphic behavior. Further-
more, the strategy pattern cannot handle changes of
data types lacking an abstract base class; i.e., obser-
vation or control command types given by a generic
robot control architecture cannot be used directly.
These remarks, together with the observation that
choices are immutable at runtime, suggested the use
of static polymorphism. In the current library imple-
mentation, static polymorphism is effectively guaran-
teed by a generic programming approach, and in par-
ticular with policy and policy classes (Alexandrescu,
2001). This programming technique supports devel-
oper’s choices at compile time, together with type
checking and code optimization, by using templates.
template< S t a t e ,
SensorData ,
Control ,
SampleCounter ,
SampleManager ,
Fusion >
cl as s Lo cal ize r : public SampleManager<State>
{
Fusion<SensorData> fu s io n
;
public :
template< . . . > / / S t ateC o nver t er
Lo cal i ze r ( Pdf &pdf ,
State C onverter <...> &co nve r te r ) ;
˜ L oca liz e r ( ) ;
template< . . . > / / SystemModel Params
void update ( C o n t r o l &u ,
SystemModel <...> &sys ) ;
template< . . . > / / SensorModel Params
void update ( SensorData &z ,
SensorModel <...> &sen ) ;
} ;
Listing 1: The
Localizer
class.
The main component of the library, the class
Localizer
, exemplifies how policies allow man-
agement of different aspects of localization prob-
lem. Listing 1 shows a simplified interface of
the
Localizer
class, including only two
update()
methods. Note the template parameters of the class:
there are both data types (
State
,
SensorData
and
Control
) and policies related to particle filter execu-
tion. Methods
update()
allow the execution of pre-
diction and correction phases by using generic sensor
and motion models,
SensorModel
and
SystemModel
,
which are fully customizable interface classes with
their own polices too.
Policies in
Localizer
provide the required flexi-
bility in RTPF implementation. The library supports
different versions of particle filters, and template pa-
rameters determine the actual algorithm implemented
in the system.
SampleCounter
allows choosing the
number of samples, that can be fixed or adaptable,
e.g. with KL-distance (Fox, 2003).
SampleManager
is the class implementing sample management and
creation/destruction of data involved in computation.
This class plays an important role, since RTPF deter-
mines a complex life cycle for particles, as shown in
figure 2. While in standard particle filters samples and
control commands survive only during a single itera-
tion (prediction, correction, resampling), RTPF needs
the storage of data over the period of an estimation
window.
4 RESULTS
In this section, we describe RTPF performance eval-
uation both in a simulated environment and using ex-
perimental data collected by navigating a robot in
a known environment. One of the purposes of this
evaluation is the comparison of the two RTPF ver-
sions differing in their method for computing mixture
weights: the original method based on steepest de-
scent and the method described in this paper and rely-
ing on the eigenvalues of the weights matrix. Simula-
tions allow comparison of the two methods in a fully-
controlled environment, whereas experiments show
the actual effectiveness of the proposed technique.
4.1 Simulation
Several tests were performed in the simulated envi-
ronment shown in figure 3, which corresponds to the
main ground floor hallway in the Computer Engineer-
ing Department of the University of Parma. This
environment allows verification of RTPF correctness
while coping with several symmetric features, which
may cause ambiguities in the choice of correct lo-
calization hypotheses. Real experiments with a mo-
bile robot were carried out in the same environment
and are described later in the paper: simulations have
helped with the setup of experiments and viceversa.
Two simulated paths exploited in simulation are also
shown in figure 3. These paths, labeled as Path 1 and
Path 2, correspond to lengths of approximately 7 m
and 5 m.
In simulation, the map is stored as a grid with a
given resolution (0.20 m) and is used both to create
simulated observations and to compute importance
weights in correction steps. Data provided to the lo-
calizer consist of a sequence of laser scans and mea-
surements: scanned ranges are obtained by ray trac-
ADDRESSING COMPLEXITY ISSUES IN A REAL-TIME PARTICLE FILTER FOR ROBOT LOCALIZATION
359
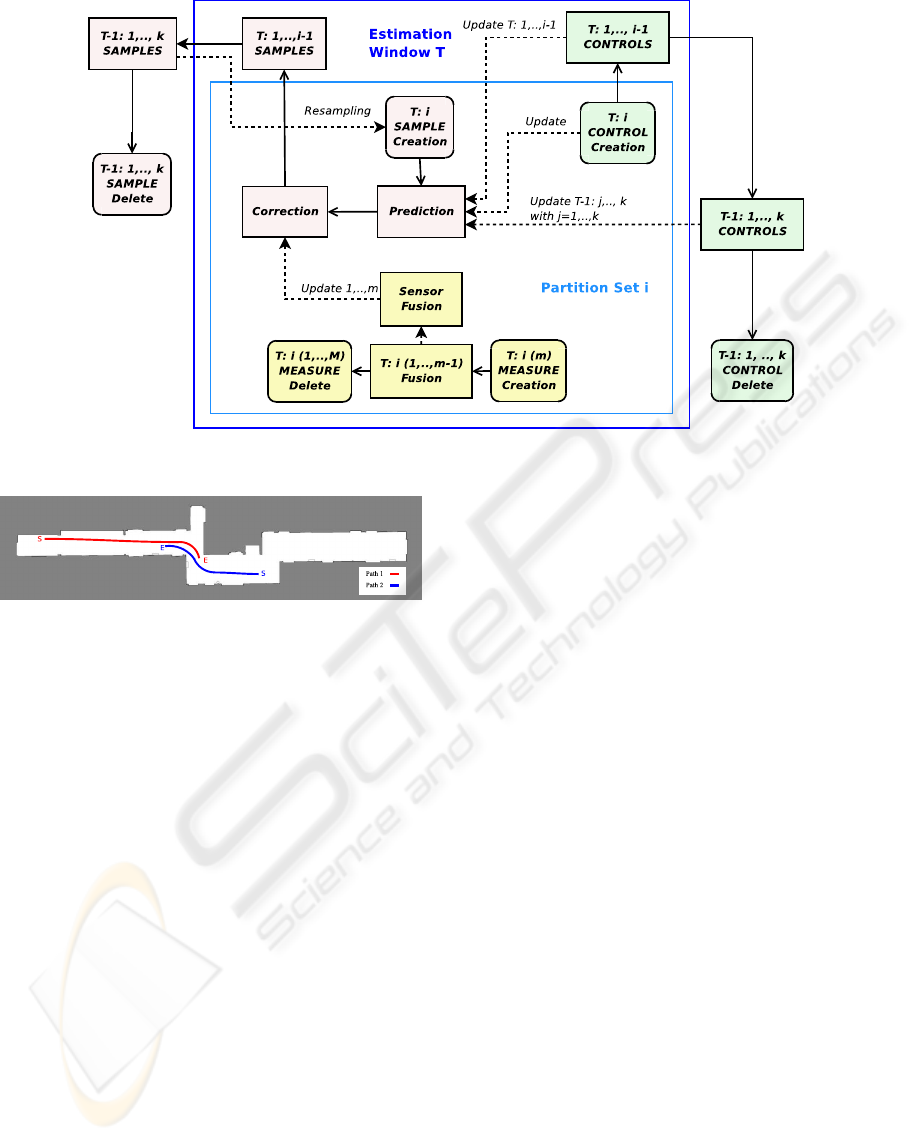
Figure 2: Life cycle for particle, measurement, and control objects within a single step in a real-time particle filter.
Figure 3: Hallway and simulated paths in the Computer
Engineering Department, University of Parma (S=Start,
E=End).
ing a beam on the discretized map. The measurement
model is also based on ray tracing and follows stan-
dard beam models for laser scanners (Thrun et al.,
2005). In our tests, we have used only three laser
beams measuring distances to left, right and frontal
obstacles; such poor sensor data stress the role of al-
gorithm instead of sensor data. A gaussian additive
noise is added to both range beams and robot move-
ments representing environment inputs and robot state
in simulation. The task of the robot is to achieve lo-
calization while moving in the map of figure 3 along
different trajectories.
Localization algorithms investigated are RTPFs in
the two versions: the original steepest descent-based
one (RTPF-Grad) and the proposed one based on the
effective number of samples (RTPF-Eig). During the
tests the partition set size is 1000 samples.
A summary of simulation results is reported in fig-
ure 5. In the figure, curves show the localization error
for the two algorithms at each iteration by consider-
ing convergence to the nearest hypothesis. For both
curves, each value is obtained by averaging the dis-
tances of the estimated pose from the real pose over
10 trials where localization converged to the correct
hypothesis. For both algorithms there were also a few
simulation instances where localization did not con-
verge to the correct hypothesis within the length of
the path, although the correct hypothesis was the sec-
ond best. These unsuccessful cases, mostly occurring
on Path 2, were approximately 10% of all simulated
localization trials. We did not verify whether the robot
would recover its correct pose in the environment with
further navigation.
On the average, the two versions of the RTPF-
based localizer converged to some few hypotheses
after three iterations: the common samples distribu-
tion is multi-modal, as shown in figure 4 where there
are two local maxima. Hence, cluster search leads to
few hypotheses with different weight (an example is
shown in figure 4). In our tests a hypothesis close to
the correct robot pose always exists, and when this
hypothesis prevails there is a sudden change in lo-
calization error, as shown in figure 5. Convergence
is helped by recognizable features, e.g. the shape of
scans, but when the environment is symmetric it can
be difficult to reach, especially with limited or noisy
sensoriality. Of course, the mean error trend in figure
5 does not correspond to any of the simulated trials;
rather, it is the result of averaging trials with quick
convergence and trials where the correct hypothesis
could only be recovered after many more iterations.
Figure 6 shows the percentage of simulation trials
converging to the correct hypothesis (i.e. with local-
ization error less than 1.5 m) at each iteration. Note
that for 40− 50% of simulation tests, convergence is
reached after few iterations. In other simulations, the
correct robot pose is recovered only after about 20 it-
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
360

Figure 4: A typical distribution of samples condensed around two prevailing hypotheses (crosses mark hypotheses, the circle
is centered in the robot position). When the wrong hypothesis has a higher weight, the localization error is huge.
0 5 10 15 20 25 30 35 40
0
1
2
3
4
5
6
7
8
Num. Iteration
Error [m]
RTPF−Grad
RTPF−Eig
Figure 5: Performance of the two RTPF versions in the sim-
ulated environment. The x-axis represents the iterations of
the algorithm. The y-axis shows the average error distance
of the estimated pose from robot pose.
0 5 10 15 20 25 30 35 40
10
20
30
40
50
60
70
80
90
100
Num. Iteration
% Test with error less than 1.5 m
RTPF−Grad
RTPF−Eig
Figure 6: Percentage of simulation trials converged to the
correct hypothesis, i.e. with localization error less than 1.5
m, during iterations for Map 1.
erations, i.e. after sensing map features that increase
the weight of the correct samples.
Empirically, for the examined environment RTPF-
Eig seems to exhibit a slightly faster convergence, on
the average, to the correct hypothesis, but its average
error after convergence appears somehow larger.
4.2 Experiments
Real experiments took place in the environment of
figure 3 collecting data with a Nomad 200 mobile
robot equipped with a Sick LMS 200 laser scanner.
The robot moved along Path 1 for about 5 m, from the
left end of the hallway in steps of about 15 − 20 cm
and reading three laser beams from each scan in the
same way of the simulation tests. In the real environ-
ment localization was always successful, i.e. it always
converged to the hypothesis closer to the actual pose
in less than 10 iterations (remarkably faster than in
simulation). Localization error after convergence was
measured below 50 cm, comparable or better than in
simulation.
To assess the consistency of the localizer’s output
on a larger set of experiments, we compared the robot
pose computed by the localizer (using the RTPF-Eig
algorithm) with the one provided by an independent
localization methodology. To this purpose, some vi-
sual landmarks were placed in the environment and on
the mobile robot, and a vision system exploiting the
ARToolKit framework (Kato and Billinghurst, 1999)
was exploited to triangualate the robot position based
on these landmarks. The vision system provided an
independent, coarse estimate of the robot pose at any
step, and hence allowed to establish convergence of
the RTPF-based localizer. The two localization esti-
mates were computed concurrently at each location
and stored by the robot.
Figure 7 shows the results of 10 tests of RTPF-
Eig over about 20 iterations. These results confirm
that RTPF-Eig achieves localization to the correct hy-
pothesis very fast in most experiments. After conver-
gence, the maximum distance between RTPF-based
and vision based estimates is about 70 cm due to the
compound error of the two systems.
5 CONCLUSION
Localizing a mobile robot remains a difficult task: al-
though effective algorithms like particle filters exist,
ADDRESSING COMPLEXITY ISSUES IN A REAL-TIME PARTICLE FILTER FOR ROBOT LOCALIZATION
361

0 5 10 15 20 25
0
1
2
3
4
5
6
7
8
9
Num. Iteration
Discrepancy Localizer−ARToolKit [m]
Figure 7: Discrepancy between RTPF-Eig and ARToolKit
estimations using real data collected in the hallway of Map
1.
setting up a concrete localization system must deal
with several architectural and implementation prob-
lems. One of these problems is the tradeoff between
sensor data acquisition rate and computational load.
Solutions like RTPF have been proposed to achieve
this tradeoff, and are open to a number of improve-
ments. Therefore, localization involves configuring
customizable features both in the algorithm and in
modules for sensor data, motion models, maps and
other algorithmic details. A good generic implemen-
tation should provide components that the end user
can adapt to his needs.
This paper has presented some improvements of
the RTPF algorithm. In the proposed enhancement,
the weight mixture of sample sets representing the
posterior are computed so as to maximize the effec-
tive number of samples.
A novel RTPF implementation based on the en-
hanced algorithm has been developed. Experiments
reported in the paper have shown this implementation
to work both in simulated environments and in the real
world. Assessing its relative merit with respect to the
original RTPF proposal requires further investigation.
ACKNOWLEDGEMENTS
This work was supported by ”LARER – Laboratorio
di Automazione della Regione Emilia-Romagna.” We
thank Bruno Ferrarini for his help with the experimen-
tal assessment.
REFERENCES
Alexandrescu, A. (2001). Modern C++ Design: Generic
Programming and Design Pattern Applied. Addison-
Wesley.
Arras, K. O., Castellanos, H. F., and Siegwart, R.
(2002). Feature-based multi-hypothesis localization
and tracking for mobile robots using geometric con-
straints. IEEE Int. Conf. on Robotics and Automation,
2:1371–1377.
Cover, T. M. and Thomas, J. A. (1991). Elements of Infor-
mation Theory. Wiley.
Doucet, A., de Freitas, J., and Gordon, N. (2001). Sequen-
tial Monte Carlo Methods in Practice. Springer.
Elinas, P. and Little, J. (2005). σMCL: Monte-carlo local-
ization for mobile robots with stereo vision. Proc. of
Robotics: Science and Systems.
Fox, D. (2003). Adapting the sample size in particle filters
through KLD-sampling. Int. J. of Robotics Research,
22(12):985–1003.
Fox, D., Burgard, W., and Thrun, S. (1999). Monte Carlo
Localization: Efficient position estimation for mobile
robots. Proc. of the National Conference on Artificial
Intelligence.
Gamma, E., Helm, R., Johnson, R., and Vlissides, J. (1995).
Design Patterns: elements of reusable object-oriented
software. Addison-Wesley.
Kato, H. and Billinghurst, M. (1999). Marker tracking and
hmd calibration for a video-based augmented reality
conferencing system. Proc. of the Int. Workshop on
Augmented Reality.
Kwok, C., Fox, D., and Meil
ˇ
a, M. (2004). Real-time particle
filters. Proc. of the IEEE, 92(3):469–484.
Leonard, J. J. and Durrant-Whyte, H. F. (1991). Mobile
Robot Localization by Traking Geometric Beacons.
IEEE Int. Conf. on Robotics and Automation.
Liu, J. (1996). Metropolized independent sampling with
comparisons to rejection sampling and importance
sampling. Statistics and Computing, 6(2):113–119.
Montemerlo, M., Roy, N., and Thrun, S. (2003). Perspec-
tives on standardization in mobile robot programming:
The Carnegie Mellon navigation (CARMEN) toolkit.
IEEE/RSJ Int. Conf. on Intelligent Robots and Sys-
tems.
Se, S., Lowe, D., and Little, J. (2002). Mobile robot lo-
calization and mapping with uncertainty using scale-
invariant visual landmark. Int. J. of Robotics Re-
search, 21(8):735–758.
Sridharan, M., Kuhlmann, G., and Stone, P. (2005). Practi-
cal vision-based monte carlo localization on a legged
robot. IEEE Int. Conf. on Robotics and Automation,
pages 3366–3371.
Thrun, S., Burgard, W., and Fox, D. (2005). Probabibilistic
Robotics. MIT Press, Cambridge, MA.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
362
