
COMMUNICATION AT ONTOLOGICAL LEVEL IN
COOPERATIVE MOBILE ROBOTS SYSTEM
Lucia Vacariu, Mihai Chintoanu
Department of Computer Science, Technical University of Cluj Napoca, 26 Baritiu str, Cluj Napoca, Romania
Navigon Company Cluj Napoca Subsidiary, Cluj Napoca, Romania
Gheorghe Lazea, Octavian Cret
Department of Automation, Technical University of Cluj Napoca, Cluj Napoca, Romania
Department of Computer Science, Technical University of Cluj Napoca, Cluj Napoca, Romania
Keywords: Mobile robots, Multiagents system, Communication, Ontology, Cooperation.
Abstract: Mobile robot applications are faced with the problem of communicating large amounts of information,
whose structure and significance changes continuously. A traditional, layered style of communication
creates a cooperation problem as fix protocols and message meaning cannot mediate the dynamic, novel
types of behaviors mobile robots are acquiring in their environment. We propose by contrast, a non-
hierarchical communication control mechanism based on the software paradigm of multiagent systems that
have specialized ontologies. It is a communication at ontological level, which allows efficient changes in the
content of the messages among robots and a better adaptability and specialization to changes. The intended
application is a cooperative mobile robot system for monitoring, manipulating and cleaning in a
supermarket. The focus of the paper is to simulate a number of well-defined, controllable and repeatable
critical ontological situations encountered in this environment that validate the system cooperation tasks.
1 INTRODUCTION
Research in mobile robotics has achieved a level of
maturity that allows applications to move from
laboratory into public-level applications. This leads
necessarily to a situation where several robots,
perhaps with different goals and different internal
representations, must cooperate for achieving shared
and not reciprocally damaging goals (Arai, Pagello,
and Parker, 2002).
A robot control system based on the paradigm of
multiagent systems can provide rich, active entities
that can adapt, represent and communicate
appropriate abstractions (Vacariu, et al, 2004).
Communicating relevant information among
heterogeneous units not designed to cooperate in the
first place raises several challenges. The
communication protocols cannot have a fix
hierarchical organization as such solutions have
been shown to lack flexibility for expanding and
adapting knowledge and behavior for cooperating
robots. The precondition is that the communication
between robots is enforced by a number of
component multiagents that have an efficient
exchange of information based on a large spectrum
of ontologies.
It has been recognized that an efficient and
correct communication will improve the
characteristics and the working of whatever
multiagent system (Russell and Norvig, 2002).
In the design of multiagent systems, it is possible
to introduce an ontological level, where specific
concepts for different relevant domains of
applications are described (DiLeo, Jacob, and
DeLoach, 2002). This level can be an information
source for multiagents.
Starting from these premises, we want to
demonstrate that the use of communication at the
ontological level of information representation is a
reliable method to obtain a correct functioning of a
system of mobile robots acting in cooperation.
455
Vacariu L., Chintoanu M., Lazea G. and Cret O. (2007).
COMMUNICATION AT ONTOLOGICAL LEVEL IN COOPERATIVE MOBILE ROBOTS SYSTEM.
In Proceedings of the Fourth Inter national Conference on Informatics in Control, Automation and Robotics, pages 455-460
DOI: 10.5220/0001620904550460
Copyright
c
SciTePress

The paper is structured as follows: Section 2
shows briefly the benefits of introducing the
ontological level in the multiagent systems design,
to achieve the information exchange. Section 3
describes a cooperative mobile robots system for
monitoring, manipulating and cleaning in a
supermarket and explains the use of ontological
level in communication. Section 4 reports the test
conditions and results obtained in the simulation.
Section 5 presents conclusions and research ideas for
future work.
2 ONTOLOGY IN MULTIAGENT
SYSTEM DESIGN
Ontology denotes here a common vocabulary with
basic concepts and relationships of a domain (Noy
and McGuinness, 2001). The domain description
requires representations for types and properties of
objects, and for relations between them. Software
agents use ontologies and knowledge databases on
ontologies as information sources.
The ontology classes describe concepts of a
domain in a taxonomic hierarchy. The roles describe
classes’ properties and have different values for
different instances. They may be restricted or not to
a certain set of values. The knowledge database is
created from individual instances of classes, with
specific values for properties, and supplemental
restrictions.
The aim of ontology integration in a multiagent
system design is a description of information using
the ontological level of knowledge representation. A
common vocabulary of a domain allows definitions
of basic concepts and relations between them to be
included in the design process of a multiagent
system. This creates premises to obtain a new
system with new facilities, that is also more robust
and adaptable.
We use the framework of MultiAgent System
Engineering MASE (DeLoach, Wood, and
Sparkman, 2001) that starts from an initial set of
purposes and makes the analysis, design and
implementation of a functional multiagent system.
The ontology can be built during the analysis stage
and after that is being used to further create new
goals for the system. Purposes often involve
parameter transmissions and consequently the
ontology classes can be used as parameters.
Objects of the data model are specified as
parameters in inter-agent conversations. In role
refining and conversation building, that involves
meta-message transmissions, that includes the type
specification for transmitted parameters. The actions
can use information contained in the parameter
attributes because the types of parameters and
attributes of types are all known. The internal
variables representing purposes and conversations
can be standardized with respect to the system
ontology. The validity of conversations is
automatically verified using parameters and
variables.
Communication is achieved by inter-agent
conversation. A conversation defines the
coordination protocol between two agents and uses
two communication diagrams between classes: one
for the sender and the other one for the receiver. The
communication diagram between classes is made of
finite state machines, which define the states of
conversation between the two participant classes.
The sender always starts a conversation by
sending the first message. Any agent who receives a
message compares it with all the active
conversations from his list. If a match is found, the
required transition is made, and the new required
activities of the new state are achieved. If there is no
match, the agent compares the message with all the
other possible messages he might have with the
sender agent, and if it finds one that matches, it will
start a new conversation.
To be able to participate in conversations, the
agents use information from disposition diagrams
where the name, address and configurations of
agents and stations are saved.
Conversations have no blocking states; all the
states have valid transitions from where it is possible
to reach the final state.
The transaction syntax uses UML notation:
receive_message(arg1)[condition]/action^transmit_
message(arg2).
Robot systems made by autonomous mobile
robots execute missions in spatial environments. The
environment description using a spatial ontology
will highlight entities with respect to space. The
spatial ontology defines concepts used to specify
space, spatial elements and spatial relations.
Therefore, when we create the ontology for the
multiagent system used in multirobot system, we
insist on physical objects, on concepts that describe
the environment using spatial localization of the
components. The terms of the concept list are
organized in classes and attributes, and an initial
model data is elaborated. The necessary concepts of
the system are specified for purpose achievement.
The communication in multiagent systems uses then
the concepts of the developed ontology.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
456

3 COOPERATIVE MOBILE
ROBOTS SYSTEM
To verify the effectiveness of using the
communication at the ontological level in a mobile
multirobot system we designed and implemented a
multiagent system. The mobile multirobot system
has the purpose to serve, in cooperation, a
supermarket. The goals the system must provide are
supervising the supermarket, manipulating objects of
different types and dimensions, cleaning and giving
alarm if necessary. Logging of all events and
situations is also necessary.
The multirobot system is cooperative. All the
robots have the goal to accomplish activities in
collaboration.
3.1 Multiagent System Design
The specification for the cooperative multiagent
system gives the following general objectives: to
supervise the supermarket; to move in the assigned
zone in the market; to identify forms or objects that
do not match the knowledge about the supervised
environment and notify theirs positions; to
manipulate objects (pick up, move and push); to
coordinate activities; to exchange information
(sending and receiving); to select the appropriate
agent with respect to activities (by competencies,
positions in space, costs); to clean, and to log events.
The system’s objectives are grouped in a
hierarchy, based on the importance and connections
between them (Figure 1).
Figure 1: Objectives hierarchy.
From the initial specifications of the system, one
defines the base scenarios for identifying the
communication ways, like obstacle movement, zone
cleaning, and intruder identification.
Using these cases, we build sequence diagrams
from where the initial roles are then identified.
In the multiagent system design we highlight the
defining elements of the domain described by the
ontology and the inter-agent communication
methodology based on using ontology concepts.
The taxonomy of the used ontology and part of
the concepts are taken from the SUMO (Suggested
Upper Merged Ontology) ontology (SUMO, 2006).
We insist here on physical entities, with necessary
add-ons for multirobot system applications. The
ontology has a larger information domain than
necessary for this particular application, and allows
simple updates. This facility will assure their usage
also in futures applications.
The ontology base concept is the Entity, the
central node of the hierarchy. In the tree we have
PhysicalEntity and AbstractEntity. We consider
every concept that may be looked like an entity with
spatial and temporal position as a PhysicalEntity. In
this category, a distinction is made between Object
and Process. The Object concept has complete
presence in any moment of his life. The ontology
tree is developed with concepts down to the
multirobot application agent’s level. Object can be
Group or Individual. We develop the Individual
concept with Region, Substance and
ConectedObject.
The objectives structures and sequence diagrams
were converted in roles and goals associated with
them. The model of roles includes roles, everyone
goals and also information about goals interactions
(Figure 2).
Figure 2: Roles model.
3.2 Multiagent System Conversations
From the role model, the multiagent system
implements different agent types: supervisor,
coordinator, transporter, cleaner, mobile agent, and
communication agent. The agent’s class diagram
highlights the roles and the conversations between
different types of agents. For every identified
COMMUNICATION AT ONTOLOGICAL LEVEL IN COOPERATIVE MOBILE ROBOTS SYSTEM
457

communication, two conversation diagrams are
necessary, each with a sequence of steps. For
instance, obstacle movement has conversation
diagrams for supervisor, coordinator, and
transporter. Every sent message has a name and
content. The content can be missing if the message
has only control role.
In our approach, the message content is always
an ontology object. By this kind of messages we can
transmit among agents any concept from the system
ontology. Each time when information about a
system object is exchanged, an ontology object will
be in fact transmitted. The minimum information of
content is the type, coordinates and dimensions of an
object.
In the multiagent system built to serve a
supermarket, the obstacles that must be moved can
be different objects from the ontology. For instance,
when the coordinator sends a message to the
transporter for moving an object, this object can be
taken from two conceptual categories, with the same
parent ConnectedObject. One concept is Artifact –
Product where the obstacle can be Desk, Table,
Chair, Case, Bin, and the other concept is
OrganicObject, that can be Human or Plant. The
transporter will send to the supervisor a message
with an object that is itself, TransporterAgent, and
has the coordinates, self-identifier, and other
information necessary for mission completion. In the
ontology taxonomy, TransporterAgent is part of the
MobileAgent concept, which identifies the mobile
robots used in mobile multirobot system, and comes
from Artifact – Device – Robot concepts.
The agents are instantiated and put into a
network diagram. A number, type and location
identify them. The built multiagent system is
dynamic. Therefore in every moment new agents
can be introduced. Agents are placed on the same
computer or in remote computers, based on their
association with mobile robots. The collective
communication is provided by broadcast
transmission. Every agent is a separate execution
thread and has one’s own port for sending and
receiving messages.
By using the method of information exchange at
the ontological level, it is possible to share
knowledge from the entire ontology between any
agents from the multiagent system. This improves
the capabilities of the system and assures a reliable
execution of the missions, a better adaptability and
specialization to changes.
4 SIMULATION CONDITIONS
AND RESULTS
The multiagent system implementation is made in
Java language, with IntelliJ IDEA support (IntelliJ
IDEA, 2006). Conversations structure uses
agentMom (Message Oriented Middleware),
component of agentTool (MASE developer)
(agentTool, 2005). The application uses
BroadcastServer interface, implemented by every
agent or agent component. An agent can share
different types of conversations. The agents and
conversations are in different threads of execution.
The agents run in parallel, independently on each
other. All conversations are made at the same time.
The ontology classes are instantiated and
transmitted in messages content. The system’s
agents have different knowledge from the ontology.
For instance, the supervisor agent knows all kinds of
objects used in conversations because it is the one
who identifies the objects and decides what type
they have. The coordinator has the same knowledge
like the supervisor because it makes the connection
with all the agents from the system. The transporter
and cleaner agents know only sub-trees of ontology,
those in correspondence with their activity areas.
The concepts used in conversations from
ontology are Case for obstacle, ConnectedObject for
dirt and Human for intruder.
Objects use length, width, and height
dimensions. The height is used to compute the
volume. The intruders don’t use dimensions because
only their position is important for the system. The
positions of objects are implemented in the Object
concept.
We implement a WorldInstance class with
information about the types and positions of agents
and objects, the minimum, maximum, and implicit
dimensions, and the work area. A part of this
information can be modified.
The multiagent system developed for the mobile
multirobot system has been tested in simulation
conditions. We built a simulation framework for sets
of activities. The agents are associated with robots
having different functionalities. Possible problems
of synchronization and sharing resources have been
solved.
Agents have windows associated with them.
These are placed in tabs in main window of the
application interface used for messages exchange
and actions. These messages show that the
ontological information is indeed exchanged. The
coordinator has two supplementary windows, to
manage the control of supervisors and transporters.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
458
We chose to simulate a number of well-defined,
controllable and repeatable critical ontological
situations encountered in this environment. The
functional situations tested were: detection of
obstacles, dirt, and intruders in the supervised area,
moving detected obstacle, cleaning detected dirt,
moving supervisors in other areas, new transporter
or cleaner agent with better capacities insertion,
coordination of supervisors, coordination of
transporters and cleaners, alarm activation, and
actions logging.
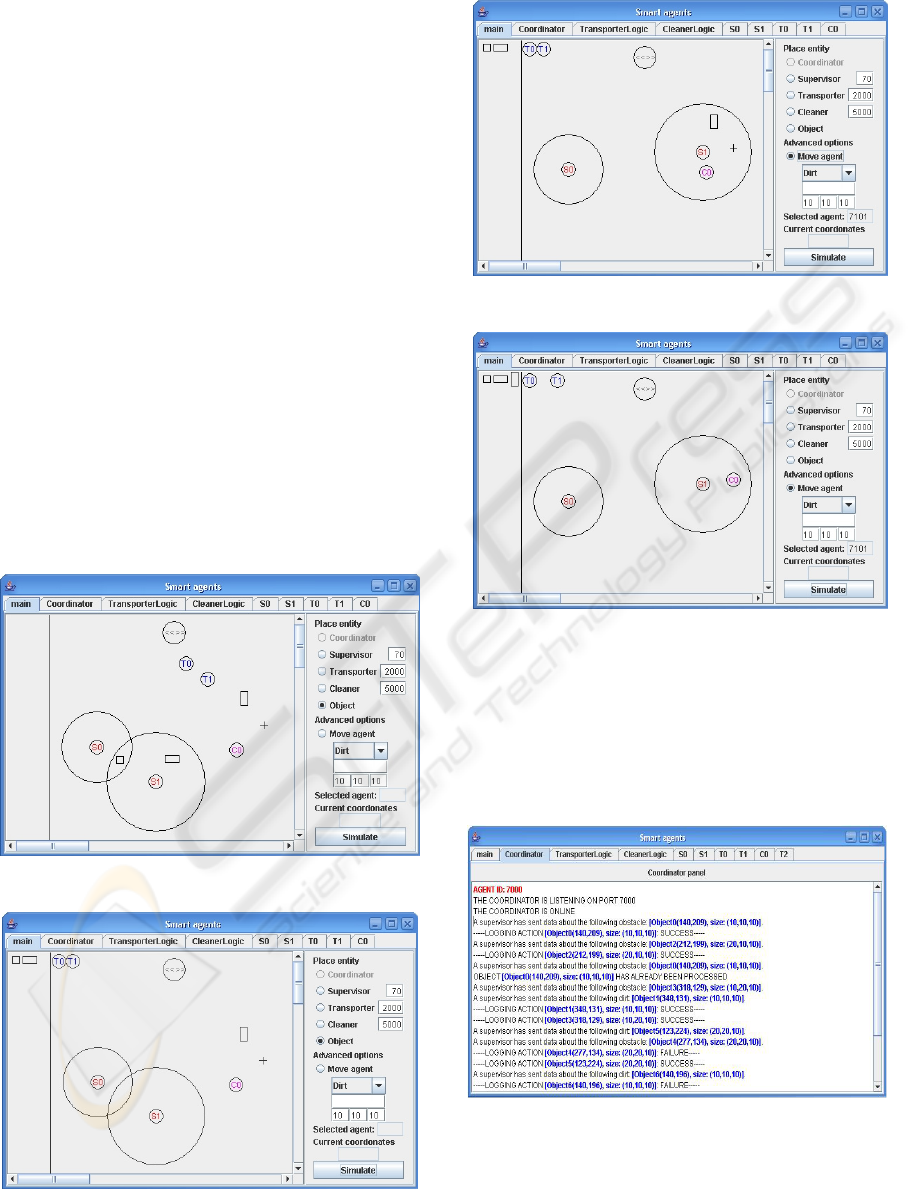
In the environment described in Figure 3.a, the
system allows detection of two cases, Square and
Rectangle, by supervisors S0 and S1. S0 and S1
detect both the Square, but just one transporter is
sent to move it. The transporters will move those
cases that are the closest from them. The other case
and dirt located outside the supervisors areas won’t
be moved (Figure 3.b). To detect these case and dirt,
S1 supervisor is moving in another area (Figure 3.c).
After moving the case by T1 and cleaning the dirt by
C0, all cases are in the storehouse; transporters are
in the waiting area and the cleaner remains where he
finished his last action. The environment looks like
Figure 3.d.
Figure 3.a: Environment.
Figure 3.b: Square and Rectangle detection and moving.
Figure 3.c: Case and dirt detection.
Figure 3.d: Final simulation.
Agents’ windows show that the system, as
designed, provided all necessary information in
communications between coordinator, supervisors,
transporters and cleaners. Objects from ontology
were successfully exchanged and all agents correctly
finished their goals, as seen in the coordinator
window (Figure 4).
Figure 4: Coordinator window.
The action is not executed and it is logged as
failure, if some information differs for some agents
(especially the dimensions of objects). This implies
COMMUNICATION AT ONTOLOGICAL LEVEL IN COOPERATIVE MOBILE ROBOTS SYSTEM
459
that new agents with better capabilities must be
introduced to accomplish the goals.
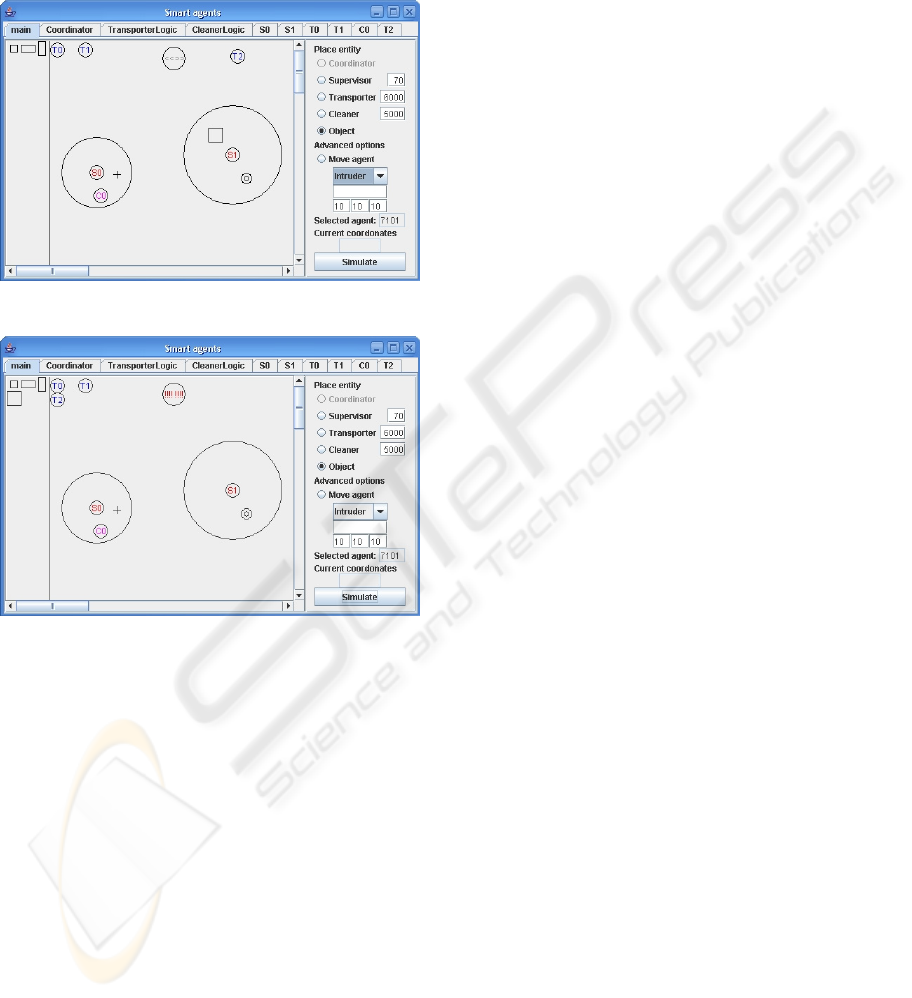
One other environment situation (Figure 5.a.) has
the transporter T2 with larger capacity and an
intruder that will be detected and after that the
coordinator will start the alarm (Figure 5.b).
Figure 5.a: New agent and objects.
Figure 5.b: Intruder detection and alarm.
The dirt is not removed because the cleaner agent
C0 is filled with the previous dirt. The new big case
is successfully processed by T2.
The coordinator performs logging of all events
and situations arising, for later consultation. For
every action we record the time elapsed for its
execution, the object that was the goal of the action
together with its characteristics, the result of action,
and which agent executed the action. When an
action is not finished or it was instantaneously
accomplished, in the log file will be record only the
time of object registration.
5 CONCLUSIONS
The design of multiagent system is valid with
respect to the purposes and requests of mobile
multirobot system. All agents are able to accomplish
successfully the missions and actions assigned to
them. The system is robust and flexible.
Using the ontological information in inter-agent
communications simplifies the communication
process. Conversations made with ontological
information are oriented to describe the spatial
representation by concepts of the environment,
specific to robotic systems.
The system allows efficient changes in the
content of the messages among robots and proves
that heterogeneous agents, having dissimilar
knowledge can, by using ontology information,
exchange necessary information to accomplish
complex goals.
The system has been tested under simulated
conditions. The positive results are leading to our
next goal, to make tests under real environments,
with mobile robots.
We will also test our approach in other types of
missions for mobile multirobot systems.
REFERENCES
AgentTool, 2005.
http://macr.cis.ksu.edu/projects/agentTool/
Arai, T., Pagello, E., and Parker, L.E., 2002. Advances in
Multi-Robot Systems. In IEEE Transactions on
Robotics and Automation Magazine. Vol. 18, No. 5,
pp. 655-661.
DeLoach, S.A., Wood, M.F., and Sparkman C.H., 2001.
Multiagent Systems Engineering. In: The International
Journal of Software Engineering and Knowledge
Engineering. Vol. 11, No. 3, pp. 231-258.
DiLeo, J., Jacob, T., and DeLoach, S., 2002. Integrating
Ontologies into Multiagent Systems Engineering. In
AOIS-2002 Proceedings of Fourth International Bi-
Conference Workshop an Agent-Oriented Information
Systems. Bologna, Italy.
IntelliJ IDEA, 2006. http://www.jetbrains.com/idea
Noy, N.F., McGuinness, D.L., 2001. Ontology
Development 101: A Guide to Creating Your First
Ontology. Stanford Knowledge Systems Laboratory
Technical Report KSL-01-05 and Stanford Medical
Informatics Technical Report SMI-2001-0880.
Russell, S.J., and Norvig, P., 2002. Artificial Intelligence:
A Modern Approach, Prentice Hall, USA, 2
nd
edition.
SUMO, 2006.
http://protege.stanford.edu/ontologies/sumoOntology/s
umo_ontology.html.
Văcariu, L., Blasko, P.C., Leţia, I.A., Fodor, G. and Creţ,
O.A., 2004. A Multiagent Cooperative Mobile
Robotics Approach for Search and Rescue Missions.
In IAV2004 Proceedings of the 5
th
IFAC/EURON
Symposium on Intelligent Autonomous Vehicles.
Lisbon, Portugal.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
460
